基于多種障礙環境建模的機器人路徑規劃
2021-04-09 02:09:54陳岳軍王敬賢
科技和產業
2021年3期
陳岳軍,王敬賢
(上海五零盛同信息科技有限公司,上海 200333)
智能化機器人擁有感知決策能力,它們可以辨識身邊的信息情況,實現自主控制并完成復雜的任務[1]。機器人的路徑規劃問題是智能控制領域中的一個關鍵問題,保證機器人在完成任務的同時提高效率[2]。路徑規劃是在起始點和目標點之間選出一條最短路徑,既能使機器人在行進過程中躲過障礙物,并且滿足特定評價標準,如行走路線距離最短、到達目標行走時間最短、自身能量消耗最小等[3-4]。目前,機器人及其路徑規劃相關問題已經取得了許多成果,可分為傳統方法和智能化方法兩大類。
傳統路徑規劃方法主要有幾何構造方法和人工勢場法。基于幾何構造的方法將機器人抽象成一個可忽略的點,同時適當擴大障礙物體積,然后構造自由空間,并將其全部連通,最后采用圖搜索算法找出最優路徑[5]。人工勢場法運用較為成熟,它用引力場和斥力場模型來表示機器人所工作的環境信息[6],受力如圖1所示。該算法原理簡單,適合底層的簡單控制,其運行速度和存儲空間與其他算法相比具有優勢。但它只解決局部空間內的避障問題,更適用于動態環境,在實時避障方面發揮重要作用。
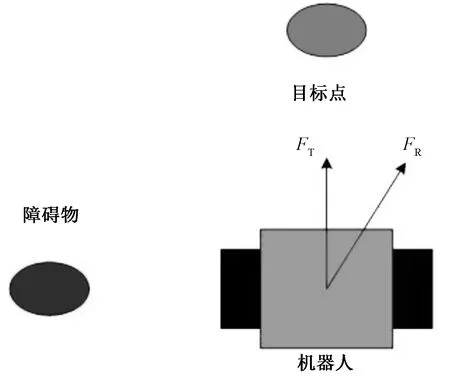
圖1 人工勢場法受力示意圖
智能化路徑規劃方法主要基于遺傳算法、模糊邏輯和蟻群算法。遺傳算法在全局環境中搜索最優路徑的能力比較強,有并行計算特性,應用較為廣泛[7]。孫樹棟等[8]實現了離散空間下機器人的路徑規劃,使用插入和刪除算子,使規劃出的路徑是連續的。……
登錄APP查看全文
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中外會展(2014年4期)2014-11-27 07:46:46
