懲罰函數(shù)結合遺傳算法的PID參數(shù)優(yōu)化
2021-04-09 07:34:36高興泉黃東冬丁三毛
吉林化工學院學報 2021年3期
高興泉,黃東冬,丁三毛
(吉林化工學院 信息與控制工程學院,吉林 吉林 132022)
現(xiàn)如今,多數(shù)PID參數(shù)進行優(yōu)化的相關優(yōu)化算法在求解最優(yōu)化問題時,都是依靠適應度函數(shù)值的大小來區(qū)分優(yōu)化結果的好壞,可以看出目標函數(shù)的選取在優(yōu)化算法中起著決定性的作用.一些常見的目標函數(shù)如絕對誤差積分[1]、誤差平方積分[2]、時間乘誤差平方積分[3]、時間乘絕對誤差積分[4]都被引用到優(yōu)化算法的過程中,這些目標函數(shù)能夠迅速減小起始誤差,并且在系統(tǒng)中反應較快,但是系統(tǒng)中因此出現(xiàn)的超調變大將會無法避免,這些適應度函數(shù)作用于系統(tǒng)時選擇性較差,最終導致系統(tǒng)的反應速度變慢和穩(wěn)定性變差等問題.本文提出將懲罰函數(shù)[5]引入到目標函數(shù)中實現(xiàn)對PID的參數(shù)優(yōu)化的方法,首先以傳統(tǒng)遺傳算法[6]為基礎,選用時間乘絕對誤差積分為目標函數(shù),然后將系統(tǒng)中出現(xiàn)的超調量作為懲罰項來構建新的目標函數(shù).最后以雙容水箱為例的仿真結果中表明,用懲罰函數(shù)構造出的新的目標函數(shù)能大大減小超調量,提高系統(tǒng)的動態(tài)響應能力.
1 PID控制算法及其參數(shù)優(yōu)化
PID控制器是根據(jù)系統(tǒng)的給定值與輸出值之間的偏差作為輸入信號,利用此信號來和PID控制器中的控制算法相乘產(chǎn)生控制輸出,其控制規(guī)律如下:
(1)
其中:Kp是一個比例系數(shù);Ki是積分系數(shù);Kd是微分系數(shù);e(t)是誤差信號;u(t)是PID的控制輸出.
PID控制器在實際應用時,最為困難的在于比例、積分、微分系數(shù)的選取問題上.所以一般都會使用優(yōu)化算法對這3個參數(shù)進行優(yōu)化進而得到理想的參數(shù)來應用于系統(tǒng).對于傳統(tǒng)優(yōu)化算法都會使用如下4種目標函數(shù)來對參數(shù)進行優(yōu)化.
對于這4種目標函數(shù)優(yōu)化出來的PID參數(shù)效果并不滿意,使得系統(tǒng)中出現(xiàn)震蕩和超調的現(xiàn)象從而導致系統(tǒng)不穩(wěn)定.這里提出將傳統(tǒng)目標函數(shù)中結合懲罰函數(shù)的思想來解決此類問題.
2 懲罰函數(shù)
懲罰函數(shù)法[7]的優(yōu)點是能將系統(tǒng)約束融入最優(yōu)化問題中,其中心思想就是將脫離可行域的點通過構造懲罰函數(shù)的方式來進行約束,然后用最優(yōu)化方法解決無約束情況下的相應的問題.然后考慮非線性約束優(yōu)化問題[8-9]:
minf(x),
(2)
s.t.gi(x)≥0,i=1,…,m,
hj(x)=0,j=1,…,l,
(3)
其中f(x)為目標函數(shù),hj(x)(j=1,…,l)是等式約束條件,gi(x)(i=1,…,m)是不等式約束條件,三者均是在Rn上的連續(xù)函數(shù).
懲罰函數(shù)中心思想就是將問題(2)轉化為:minG(x)=f(x)+cP(x),此處的G(x)就是懲罰函數(shù),c為懲罰因子,P(x)則為懲罰項.
通常當x在可行域內時,P(x)=0,則G(x)=f(x);當x不在可行域內的時候,在x處,cP(x)是很大的正數(shù),他的存在就是迫使脫離點靠近可行域.
引理2.1[10]假設f,g,h是Rn上的連續(xù)函數(shù),對于每一個懲罰因子c,都會存在一個xc∈Rn,使得G(c)=f(xc)+cP(xc)成立,滿足以下內容:
(1)inf{f(x):g(x)≤0,h(x)=0}≥
supc>0G(c),其中G(c)=inf{f(x)+cP(x)};
(2)當c>0時,f(x)關于x單調不降,G(c)對于c單調不降,P(xc)對于c單調不增.
為了得到滿意的過渡過程動態(tài)特性,采用時間乘絕對誤差積分為目標函數(shù):

(4)
若系統(tǒng)中出現(xiàn)了超調,以原來的目標函數(shù)為基礎再加入懲罰函數(shù),將系統(tǒng)中出現(xiàn)的超調量作為懲罰項加入目標函數(shù)中形成新的目標函數(shù):
(5)
所以對于系統(tǒng)中的目標函數(shù)可以總結為:
(6)
將帶有懲罰函數(shù)的目標函數(shù)應用到PID的參數(shù)優(yōu)化中需要一種優(yōu)化算法,這里結合傳統(tǒng)遺傳算法實現(xiàn)PID的參數(shù)優(yōu)化.
3 遺傳算法解決PID參數(shù)優(yōu)化問題
3.1 遺傳算法
遺傳算法是一種可以模擬自然界生物繁衍規(guī)則進化發(fā)展機制的隨機全局搜索和優(yōu)化學習算法.該算法的工作原理大致為以下3步:第1步,初始群體是在給定區(qū)域內的隨機方式產(chǎn)生;第2步,通過研究選取的適應度函數(shù)來計算各個個體的適應度值,以適應度值的大小來判斷所得解或個體是否為系統(tǒng)最優(yōu);第3步,按照遺傳算子3大基本步驟進行尋優(yōu)處理,也就是選擇、交叉、變異,從而得到最優(yōu)良的個體,最終讓種群不斷地尋優(yōu)直至達到理想的目標區(qū)域內為止.
3.2 遺傳算法求解PID參數(shù)優(yōu)化問題的步驟
遺傳算法來優(yōu)化Kp,Ki,Kd3個參數(shù),優(yōu)化得到的參數(shù)對系統(tǒng)的控制性能有很大的改善.首先隨機產(chǎn)生初始種群,將種群信息給予PID參數(shù).若系統(tǒng)中出現(xiàn)超調,那么將超調量作為懲罰項構造懲罰函數(shù)并且加入目標函數(shù)中,從而生成新的目標函數(shù).將新的目標函數(shù)融入遺傳算法中的性能指標中進行判斷,借助遺傳算法中的基本法則不斷優(yōu)化,直到系統(tǒng)達到最大進化代數(shù),輸出最優(yōu)一組參數(shù).懲罰函數(shù)結合遺傳算法優(yōu)化PID參數(shù)示意圖如圖1所示.
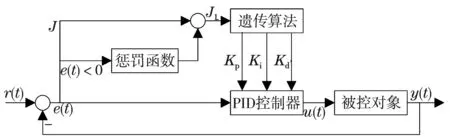
圖1 遺傳算法優(yōu)化PID參數(shù)系統(tǒng)圖

3.3 實施步驟
遺傳算法通過以下步驟優(yōu)化PID參數(shù):
(1)按經(jīng)驗選取一組Kp、Ki、Kd參數(shù),根據(jù)系統(tǒng)的實際情況以及要求確定約束條件,Kp∈[0,8],Ki∈[0,2],Kd∈[0,1].
(2)編碼及初始種群生成.采用二進制的方法對系統(tǒng)中的Kp、Ki、Kd參數(shù)進行編碼,并且設置種群規(guī)模為50,根據(jù)之前按經(jīng)驗法所得參數(shù)產(chǎn)生初始種群.
(3)系統(tǒng)如果存在超調,則選擇加入懲罰函數(shù)的目標函數(shù)J1,如果沒有超調,則選擇目標函數(shù)J作為最優(yōu)性能指標.
(4)解碼,確定適應度函數(shù)f=1/J,根據(jù)適應度函數(shù)來算個體適應度值的大小來判斷并找出最優(yōu)個體.
(5)若符合優(yōu)化要求(達到設置的最大進化代數(shù)),即可輸出系統(tǒng)中最優(yōu)的一組PID參數(shù),算法結束,若不滿足要求,按照遺傳算法的核心三大步繼續(xù)尋優(yōu)以尋得最優(yōu)一組參數(shù)為止.
(6)返回步驟(3),若系統(tǒng)流程優(yōu)化至指定要求(達到設置的最大進化代數(shù)),將最優(yōu)解輸出,否則,繼續(xù)進行優(yōu)化.
遺傳算法優(yōu)化PID參數(shù)的流程圖如圖2所示.
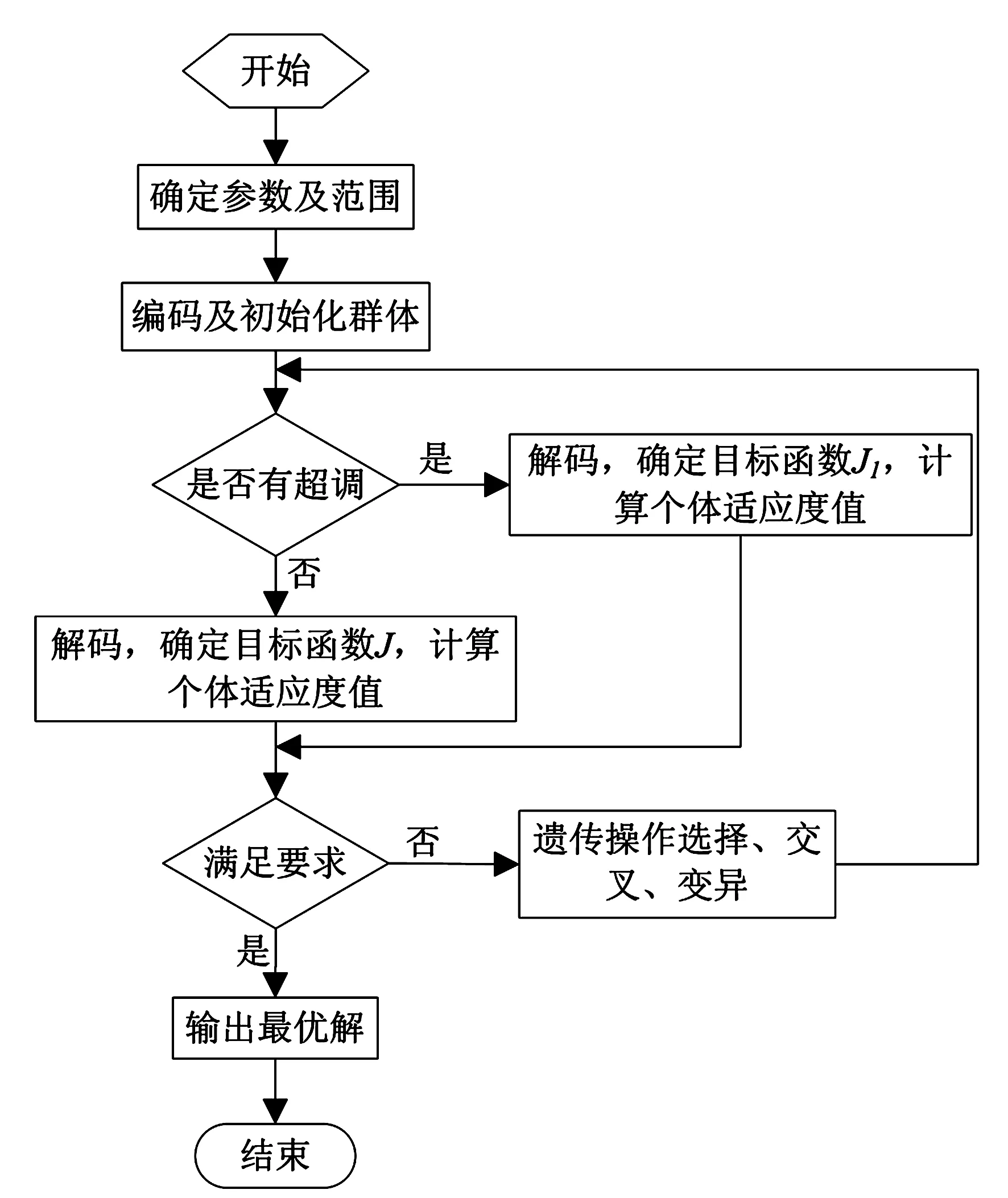
圖2 遺傳算法優(yōu)化PID參數(shù)流程
4 仿真實驗并分析
以雙容水箱系統(tǒng)為例.將懲罰函數(shù)引入到目標函數(shù)中實現(xiàn)對PID參數(shù)優(yōu)化的方法應用到雙容水箱系統(tǒng)中.
雙容水箱模型描述如下:
(7)
其中:h1和h2分別代表上水箱和下水箱的液位;Q代表流量;其他參數(shù)代表的意義及其數(shù)值如表1所示.
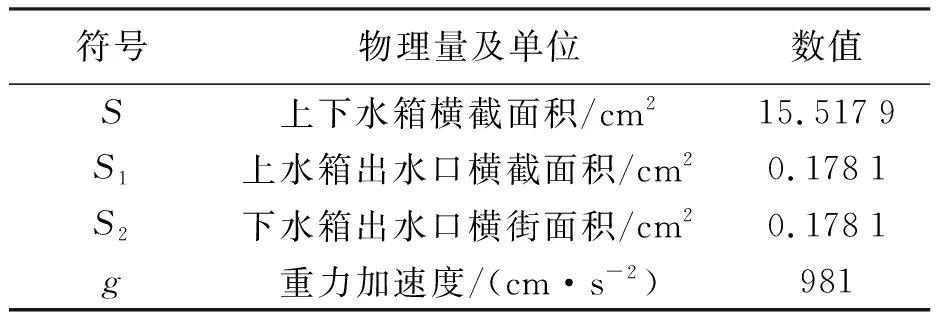
表1 參數(shù)代表意義及數(shù)值
雙容水箱系統(tǒng)實際上是以下水箱的液位達到設定值為控制目標.上水箱和下水箱的初始液位均設為0.本次設計實驗是對下水箱液位達到的設定值為15 cm.
下面采用基本遺傳算法、懲罰函數(shù)引入到目標函數(shù)兩種方法對PID參數(shù)整定的仿真進行對比實驗.遺傳算法中的種群大小設置為50,進化代數(shù)為100代,交叉率為0.9,變異率為0.01,懲罰函數(shù)的懲罰因子設置為100.
兩種方法優(yōu)化PID參數(shù)結果如表2所示.
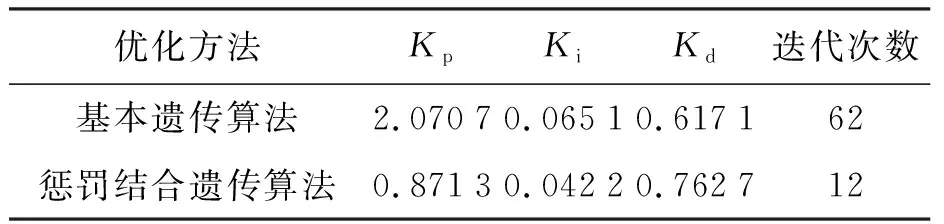
表2 兩種方法優(yōu)化PID參數(shù)的結果
圖3所示為兩種優(yōu)化PID參數(shù)方法對最優(yōu)適應度值的對比圖.

進化代數(shù)圖3 最優(yōu)適應度值對比圖
從圖3就可以看出,通過兩種優(yōu)化方法最后得到的最優(yōu)指標幾乎是一致的,但是基本的遺傳算法在58代的時候接近最優(yōu),62代才能達到最優(yōu),而懲罰函數(shù)引入到目標函數(shù)的方法在5代的時候接近最優(yōu),到12代的時候就達到了最優(yōu),表明了懲罰函數(shù)引入到目標函數(shù)的方法能夠大大提高系統(tǒng)的動態(tài)響應能力.
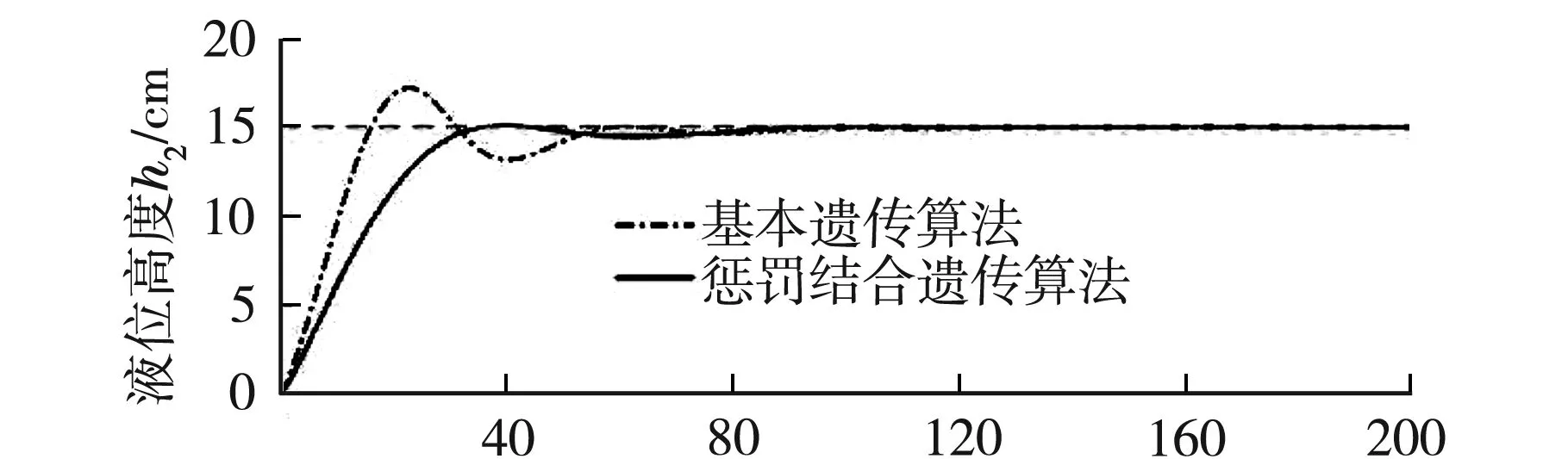
圖4為總仿真時間為200 s下的兩種優(yōu)化后的下水箱液位曲線和PID輸出控制量曲線.
從圖4可以看出,基本的遺傳算法雖然能使系統(tǒng)達到穩(wěn)態(tài),但是系統(tǒng)中還是存在著較大的超調.而用本文所設計的新目標函數(shù)的結果來看,系統(tǒng)中幾乎沒有存在超調,有效地控制了系統(tǒng)中的超調量,并且能夠有效地改善系統(tǒng)控制性能的穩(wěn)定性.
t/s
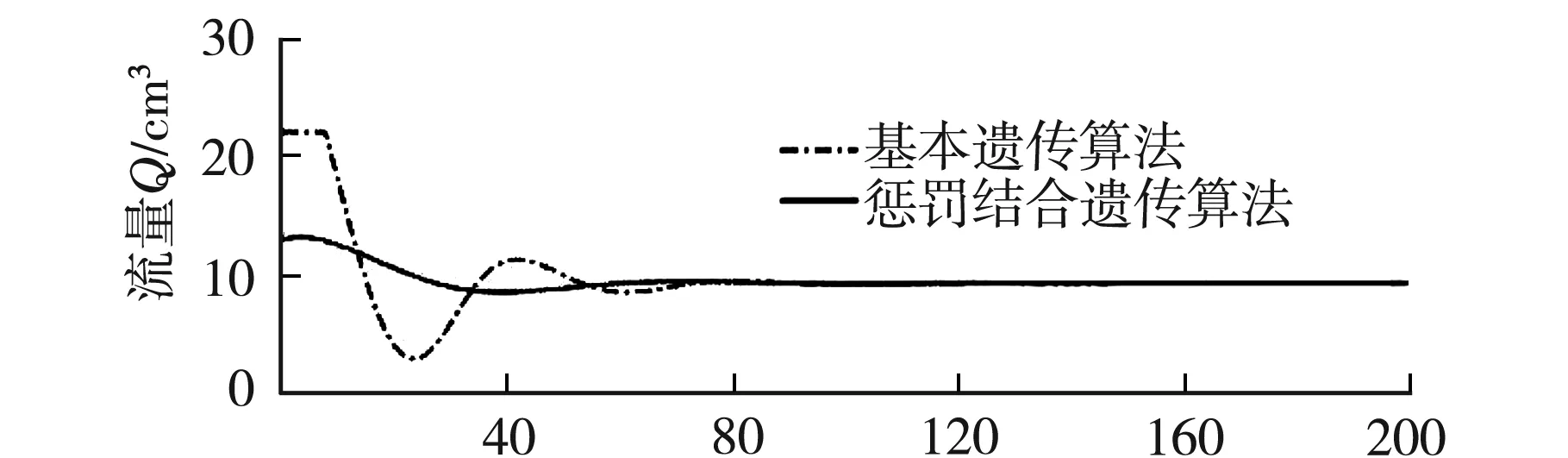
t/s圖4 液位曲線及控制量曲線
5 結 論
針對傳統(tǒng)優(yōu)化算法對PID參數(shù)優(yōu)化時,由于目標函數(shù)選擇不當出現(xiàn)的超調量過大,從而引起系統(tǒng)的反應速度變慢和穩(wěn)定性變差的問題,提出了懲罰函數(shù)引入到目標函數(shù)中實現(xiàn)對PID的參數(shù)優(yōu)化的方法.在系統(tǒng)的運行過程中,一旦產(chǎn)生超調,則懲罰函數(shù)將會用超調量作為懲罰項加入目標函數(shù)中,進而形成新的目標函數(shù),遺傳算法將會以帶有罰函數(shù)的目標函數(shù)進行優(yōu)化.本文中,以雙容水箱系統(tǒng)仿真為例,實踐仿真結果表明,懲罰函數(shù)引入到目標函數(shù)中實現(xiàn)對PID的參數(shù)優(yōu)化的方法能有效地減小了超調量,加快優(yōu)化以及運行速度的同時保證了系統(tǒng)的穩(wěn)定性.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小讀者(2020年2期)2020-03-12 10:34:06
趣味(語文)(2018年1期)2018-05-25 03:09:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
