非結構道路環境下的智能汽車質心側偏角估計
2021-04-09 05:46:57王建鋒李娜
計算技術與自動化 2021年1期
王建鋒 李娜
摘 要:車輛質心側偏角是描述車輛側向運動狀態的重要參量之一,其估計的精度直接影響車輛的安全控制,傳統的質心側偏角估計方法不能滿足非結構道路環境下的智能汽車質心側偏角估計的要求。通過建立3 自由度智能汽車動力學模型,采用CarSim和MATLAB 構建智能汽車整車參數化模型;基于擴展kalman濾波(EKF)算法,設計非結構道路環境下的狀態觀測器對智能汽車質心側偏角進行估計。在高、低附著系數路面雙移線工況和蛇形工況下,對狀態觀測器的估計效果進行聯合仿真驗證。仿真結果表明:該方法能較精確地估計出非結構道路環境下智能汽車的質心側偏角。
關鍵詞:智能汽車;質心側偏角;非結構道路;估計
中圖分類號:U461????? 文獻標識碼:A
Sideslip Angle Estimation of Intelligent
Vehicle in Unstructured Road Environment
WANG Jian-feng1,2,LI Na1
(1.Shaanxi Road Traffic Intelligent Detection and Equipment Engineering Technology Research Centre, Changan
University, Xian,Shaanxi 710064,China;2.Shool of Automobile, Changan University,Xian,Shaanxi 710064,China)
Abstract:Sideslip angle of vehicle is one of the important parameters to describe the lateral motion state of vehicles, and the accuracy of its estimation directly affects the safety control of vehicles. The traditional sideslip angle estimation method can not meet the requirements of sideslip angle estimation of intelligent vehicles in unstructured road environment. Through the establishment of 3-dof vehicle dynamics model, CarSim and MATLAB were used to construct the parametric model of the whole intelligent vehicle. Based on the extended Kalman filter (EKF) algorithm, a state observer was designed to estimate sideslip angle of the intelligent vehicle. The estimation effect of the state observer was verified by the joint simulation under the double lane change test and double lane change test of road with high and low adhesion coefficient. The simulation results show that the proposed method can accurately estimate the sideslip angle of intelligent vehicle in unstructured road environment.
Key words:intelligent vehicle;sideslip angle;unstructured road;estimation
非結構化道路環境復雜,通常沒有車道線和明顯的道路邊界。車輛在非結構化道路上行駛比在結構化道路上行駛更復雜。鑒于非結構道路環境的復雜性,研究非結構道路環境下的智能汽車主動控制具有重要的意義[1]。
質心側偏角是汽車安全控制中的重要參數,實時、準確地獲取汽車的質心側偏角是實現車輛安全控制的重要保障,尤其在非結構道路環境下。汽車的質心側偏角定義為汽車質心處的側向速度與縱向速度的比值,無法直接測量。只能通過車載傳感器測量汽車側向加速度、橫擺角速度、轉向盤轉角等參數采用數據融合的方法進行估計。
目前,質心側偏角估計的方法主要有基于數值積分的估計方法、基于動力學模型估計方法和基于機器學習的估計方法。數值積分的估計方法主要是利用橫擺角速率和側向加速度等通過數值積分估算出車輛的側向速度,計算汽車的質心側偏角,該方法受傳感器信號噪聲的影響,積分結果存在累積誤差[2-4]。基于動力學模型估計方法是通過建立精確的動力學模型,利用可測量的模型輸入參數估計質心側偏角,該方法估計精度直接依賴于動力學模型,很難在非線性段進行準確估計[5-6]。基于機器學習的估計方法是利用機器學習的方法對可測變量和已知的質心側偏角的樣本數據進行訓練,建立起輸出參數和質心側偏角之間的映射關系,其估計精度依賴于樣本的質量和數量[7-8]。
綜合基于數值積分的估計方法和基于動力學模型估計方法的優點,在汽車的線性區采用動力學模型方法,在汽車的非線性區采用數值積分的方法,基于汽車動力學模型及kalman濾波算法設計智能汽車質心側偏角狀態觀測器。
1 智能汽車3自由度非線性模型
為了設計有效的非結構道路環境下的智能汽車質心側偏角估計器,首先建立可靠的智能汽車動力學模型。兼顧側偏角估計的精度和估計算法實時性求解的要求,考慮車輛的側向運動、橫擺運動及側傾運動,建立如式(1)所示的3自由度車輛動力學模型[9-10]。
將非線性模型轉換為線性模型,雖然能夠較好地解決kalman濾波算法在處理非線性系統時的發散問題,但是并不是在任何時候都能有較高的估計精度。主要原因是卡爾曼濾波器的輸出由模型預測和測量反饋校正兩部分組成,濾波器的輸出精度由測量模型精度和測量反饋校正綜合決定。當測量噪聲較大時,估計精度主要依賴于模型預測精度,當系統噪聲較大時,估計精度主要依賴于測量反饋校正。因此綜合基于數值積分估計方法和動力學模型估計方法的優點,在汽車的線性區采用動力學模型方法,在汽車的非線性區采用數值積分方法,基于汽車動力學模型及kalman濾波算法設計智能汽車質心側偏角狀態觀測器。
2.2 智能汽車質心側偏角狀態觀測器設計
基于所建立的智能汽車動力學模型和基kalman 濾波器的質心側偏角估計方法,設計非結構道路環境下的智能汽車質心側偏角狀態觀測器。觀測器的輸入變量為U(t)=(δ),輸出變量為Y(t)=ωr?? φ·T,狀態變量為X(t)=β?? ωr?? φ?? φ·T。將所建立的動力學模型轉化為狀態方程的形式為:
利用所建立的智能汽車質心側偏角狀態觀測器就可以估計出智能汽車在不同工況下的質心側偏角。
3 智能汽車質心側偏角估計仿真
為了驗證提出的非結構道路環境下的智能汽車質心側偏角估計效果,參照ISO標準進行雙移線工況和蛇形工況仿真實驗,實驗用智能汽車的主要仿真參數如表2所示。
3.1 高附著系數路面雙移線仿真
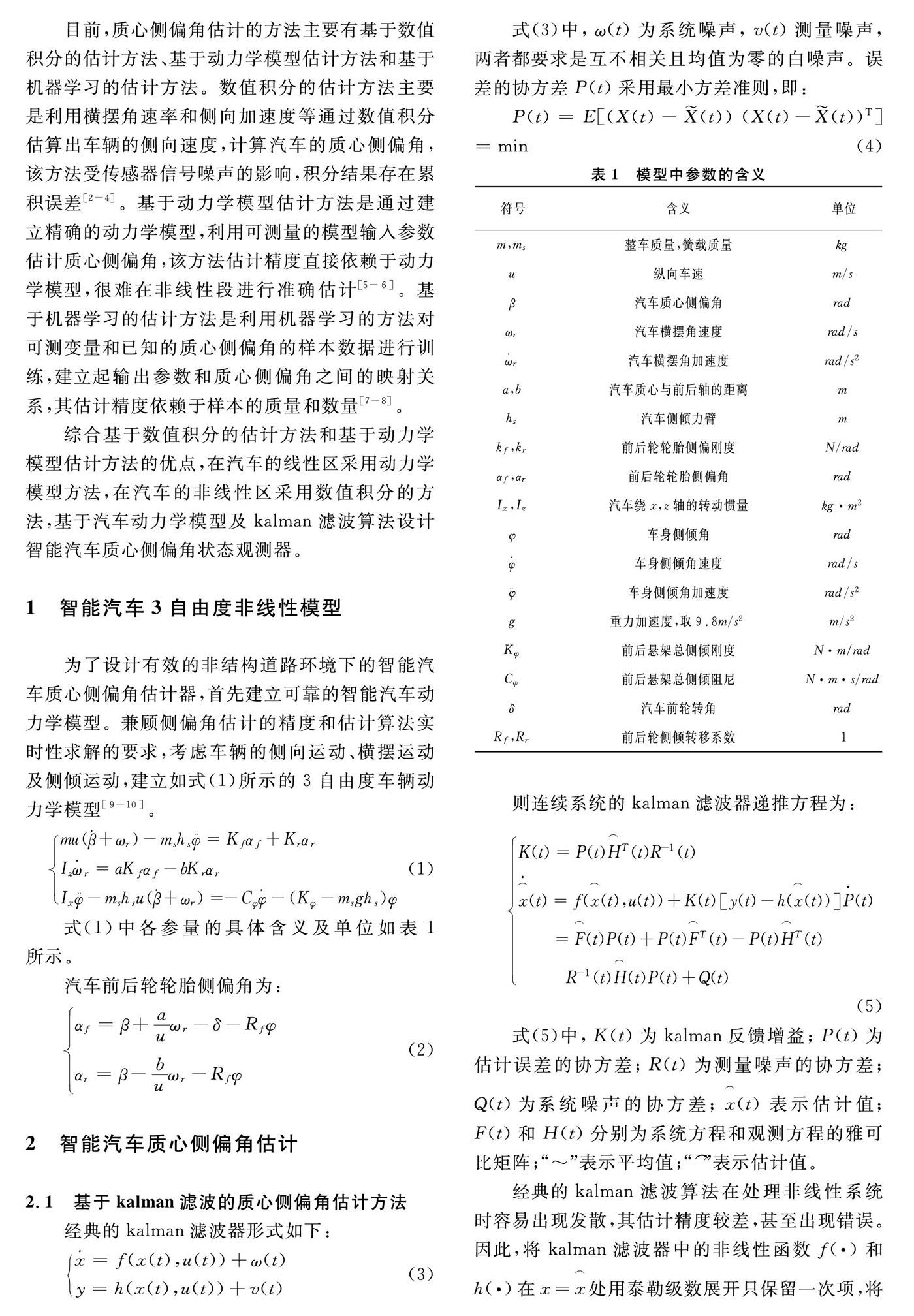
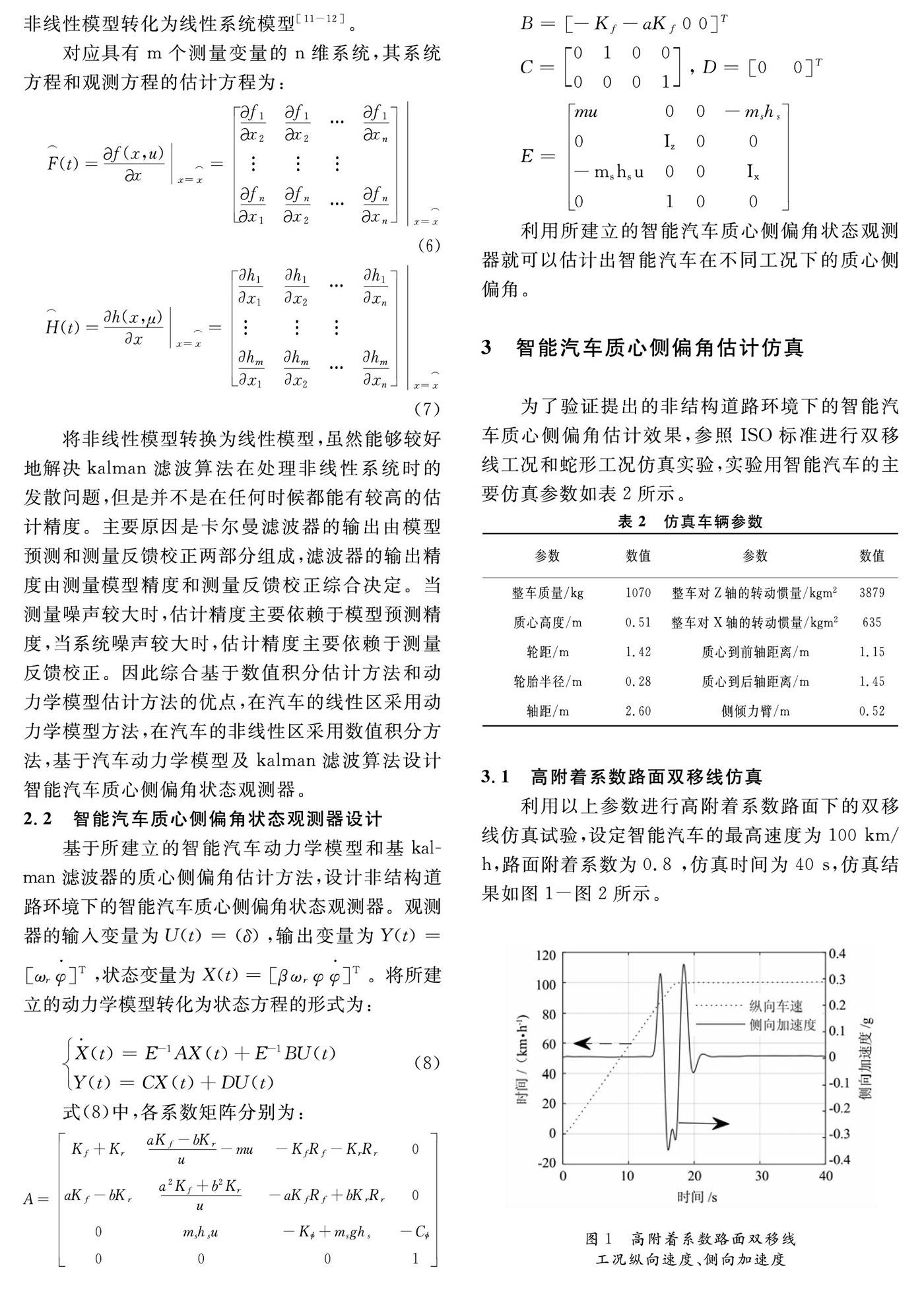
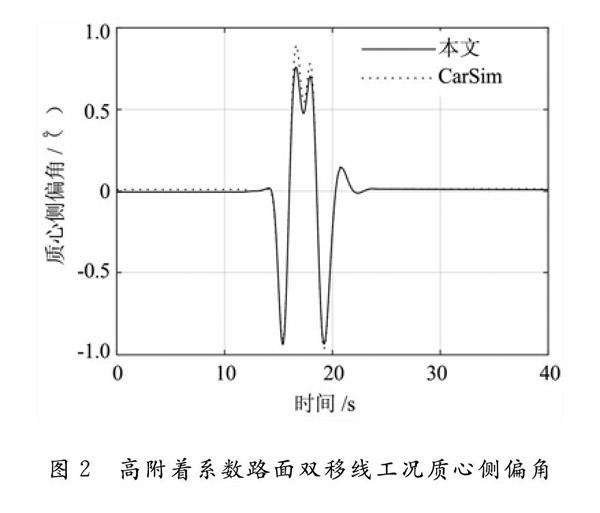
利用以上參數進行高附著系數路面下的雙移線仿真試驗,設定智能汽車的最高速度為100 km/h,路面附著系數為0.8 ,仿真時間為40 s,仿真結果如圖1-圖2所示。
從圖1 可以看出,在車速為100 km/h,路面附著系數為0.8 的雙移線工況下,側向加速度小于0.4 g,可見輪胎處于線性區域。從圖2 可以看出,高附著系數雙移線工況下本文方法和CarSim 仿真結果很接近,最大峰值誤差為4.7 %。
3.2 低附著系數路面雙移線仿真
利用以上參數進行低附著系數路面下的雙移線仿真試驗,設定汽車的最高速度為80 km/h,路面附著系數為0.4 ,仿真時間為40 s,仿真結果如圖3-圖4所示。
從圖3 可以看出,在車速為80 km/h,路面附著系數為0.4 的雙移線工況下,側向加速度曲線在第一個波谷和第二個波峰出超過了0.4 g,在該兩處輪胎處于非線性區域。從圖4 可以看出,低附著系數雙移線工況下本文方法和CarSim 仿真結果也較接近,但在輪胎非線性區誤差相對較大,最大峰值誤差為5.3 %。
3.3 高附著系數路面蛇形仿真
利用以上參數進行高附著系數路面下的蛇形仿真試驗,設定汽車的最高速度為60 km/h,路面附著系數為0.8 ,仿真時間為40 s,仿真結果如圖5-圖6所示。
從圖5 可以看出,在車速為60 km/h,路面附著系數為0.8 的蛇形工況下,在側向加速度曲線的第1、2、3 個波谷處,第2、3、4 個波峰處都超過了0.4 g,可見輪胎處于了非線性區域。從圖6 可以看出,高附著系數雙移線工況下本文方法和CarSim 仿真結果非常接近,主要誤差出現在輪胎進行非線性區段,本文方法與CarSim 的質心側偏角的最大峰值誤差為3.1 %。
3.4 低附著系數路面蛇形仿真
利用以上參數進行低附著系數路面下的蛇形仿真試驗,設定汽車的最高速度為40 km/h,路面附著系數為0.4 ,仿真時間為40 s,仿真結果如圖7-圖8所示。
從圖7 可以看出,在車速為40 km/h,路面附著系數為0.4 的蛇形工況下,側向加速度小于0.4 g,可見輪胎處于了線性區域。從圖8 可以看出,低附著系數蛇形工況下本文方法和CarSim 仿真結果非常接近,本文方法與CarSim 的質心側偏角的最大峰值誤差為1.9 %。
4 結 論
針對非結構道路環境下的智能汽車質心側偏角估計問題,基于智能汽車動力學模型及Kalman濾波算法,設計了智能汽車質心側偏角狀態觀測器。利用高、低附著系數路面下雙移線工況和高、低附著系數路面下蛇形工況對智能汽車質心側偏角狀態觀測器的估計效果與carsim仿真結果進行
對比,仿真結果表明所設計的智能汽車質心側偏角狀態觀測器輸出的估計值與CarSim 整車參數化模型輸出值雖在曲線波峰和波谷處存在一定的偏差,但其趨勢基本相同,且估計精度較高,達到了預期估計目標,能夠滿足非結構道路環境下的智能汽車控制的要求。
參考文獻
[1] 趙俊梅,張利平.智能車輛中非結構化道路檢測技術的研究[J].車輛與動力技術,2010,(4):10-13+24.
[2] PIYABONGKARN D,RAJAMANI R,GROGG J A,et al. Development and experimental evaluation of a slip angle estimator for vehicle stability control[J]. IEEE Transactions on Control Systems Technology, 2009,17(1):78-88.
[3] 張晨晨,夏群生,何樂.質心側偏角對車輛穩定性影響的研究[J].汽車工程,2011,(4):277-282.
[4] CHEN B C,HSIEH F C. Sideslip angle estimation using extended Kalman filter[J]. Vehicle System Dynamics, 2008, 46(sup):353-364.
[5] STEPHANT J,CHARARA A,MEIZEL D. Virtual sensor: application to vehicle sideslip angle and transversal forces[J]. IEEE Transactions on Industrial Electronics, 2004, 51(2):278-289.
[6] 皮大偉,張丙軍,鐘國華. 汽車質心側偏角觀測器試驗驗證[J].河北科技大學學報,2013,(4):113-118.
[7] CHELI F,SABBIONI E,PESCE M, et al. A methodology for vehicle sideslip angle identification: comparison with experimental data [J]. Vehicle System Dynamics, 2007,45(6):549-563.
[8] HE Jun-jie, CROLLA D A,LEVESLEY M C, et al. Coordination of active steering, driveline, and braking for integrated vehicle dynamics control[J]. Journal of Automobile Engineering, 2006, 220(1):1401-1421.
[9] 林棻,趙又群,姜宏. 基于Simulink 的四輪轉向汽車神經網絡控制策略仿真[J]. 江蘇大學學報(自然科學版),2008,29(5):390-393.
[10]姜宏.基于Matlab/Simulink 和神經網絡的四輪轉向車輛控制研究[D].南京:南京航空航天大學,2007.
[11]方春杰.純電動汽車質心側偏角估計及仿真分析[J].汽車工程師,2017,(11):34-38.
[12]劉飛,熊璐,鄔肖鵬,等.車輛質心側偏角估計算法設計與對比分析[J]. 同濟大學學報(自然科學版),2015,43(3):448-455.