基于移動(dòng)執(zhí)行器的無(wú)線傳感器和執(zhí)行器網(wǎng)絡(luò)充電方法
2021-04-11 14:56:24蘇州博睿測(cè)控設(shè)備有限公司韓會(huì)榮
電子世界 2021年6期
蘇州博睿測(cè)控設(shè)備有限公司 韓會(huì)榮
本文設(shè)計(jì)了一種無(wú)線傳感器與執(zhí)行器網(wǎng)絡(luò)的移動(dòng)充電方法,根據(jù)節(jié)點(diǎn)的能量情況和當(dāng)前位置正確選擇下一個(gè)充電候選節(jié)點(diǎn)。本文算法在保證執(zhí)行器節(jié)點(diǎn)不發(fā)生故障的前提下,盡量減少故障傳感器節(jié)點(diǎn)的數(shù)量。仿真實(shí)驗(yàn)證明了本文算法的優(yōu)勢(shì),有效降低了傳感器節(jié)點(diǎn)的故障率,并實(shí)現(xiàn)延遲充電與成本的平衡。
1 介紹
無(wú)線傳感器與執(zhí)行器網(wǎng)絡(luò)(WSANs)是無(wú)線傳感器網(wǎng)絡(luò)(WSNs)的衍生產(chǎn)品。除了傳感器外,還有一些具有計(jì)算和通信能力的執(zhí)行器節(jié)點(diǎn)加入到網(wǎng)絡(luò)中。執(zhí)行器節(jié)點(diǎn)被組織成一個(gè)內(nèi)部網(wǎng)絡(luò),執(zhí)行器可以相互合作和通信。此外,每個(gè)執(zhí)行器覆蓋一個(gè)特定的區(qū)域,負(fù)責(zé)該區(qū)域的事件。通常,傳感器節(jié)點(diǎn)將事件傳送到最近的執(zhí)行器節(jié)點(diǎn),執(zhí)行器節(jié)點(diǎn)對(duì)事件進(jìn)行初步處理,然后將處理后的數(shù)據(jù)通過(guò)內(nèi)部網(wǎng)絡(luò)發(fā)送給基站(BS)。傳感器節(jié)點(diǎn)一般是不動(dòng)的,但執(zhí)行器可以隨機(jī)移動(dòng)。執(zhí)行器節(jié)點(diǎn)的電池容量比傳感器節(jié)點(diǎn)大得多,故執(zhí)行器節(jié)點(diǎn)需要更多的充電時(shí)間才能變成滿能量。
在WSANs中,執(zhí)行器節(jié)點(diǎn)與傳感器節(jié)點(diǎn)都有能量約束。雖然WSNs的能量補(bǔ)充已有深入研究,但WSNs的充電方法不能很好地應(yīng)用于WSANs。其主要原因是:第一,執(zhí)行器節(jié)點(diǎn)在整個(gè)網(wǎng)絡(luò)中起著至關(guān)重要的作用。一旦執(zhí)行器節(jié)點(diǎn)死亡,整個(gè)網(wǎng)絡(luò)的性能將受到很大影響。第二,與傳感器相比,執(zhí)行器完全充電的時(shí)間要長(zhǎng)得多,在這種情況下,我們要保證執(zhí)行器節(jié)點(diǎn)不死,并保證沒(méi)有及時(shí)充電而死亡的傳感器節(jié)點(diǎn)數(shù)量降到最低。第三,執(zhí)行器節(jié)點(diǎn)在網(wǎng)絡(luò)中是可移動(dòng)的。因此,應(yīng)該考慮執(zhí)行器的精確跟蹤問(wèn)題從而有效的對(duì)其進(jìn)行充電。
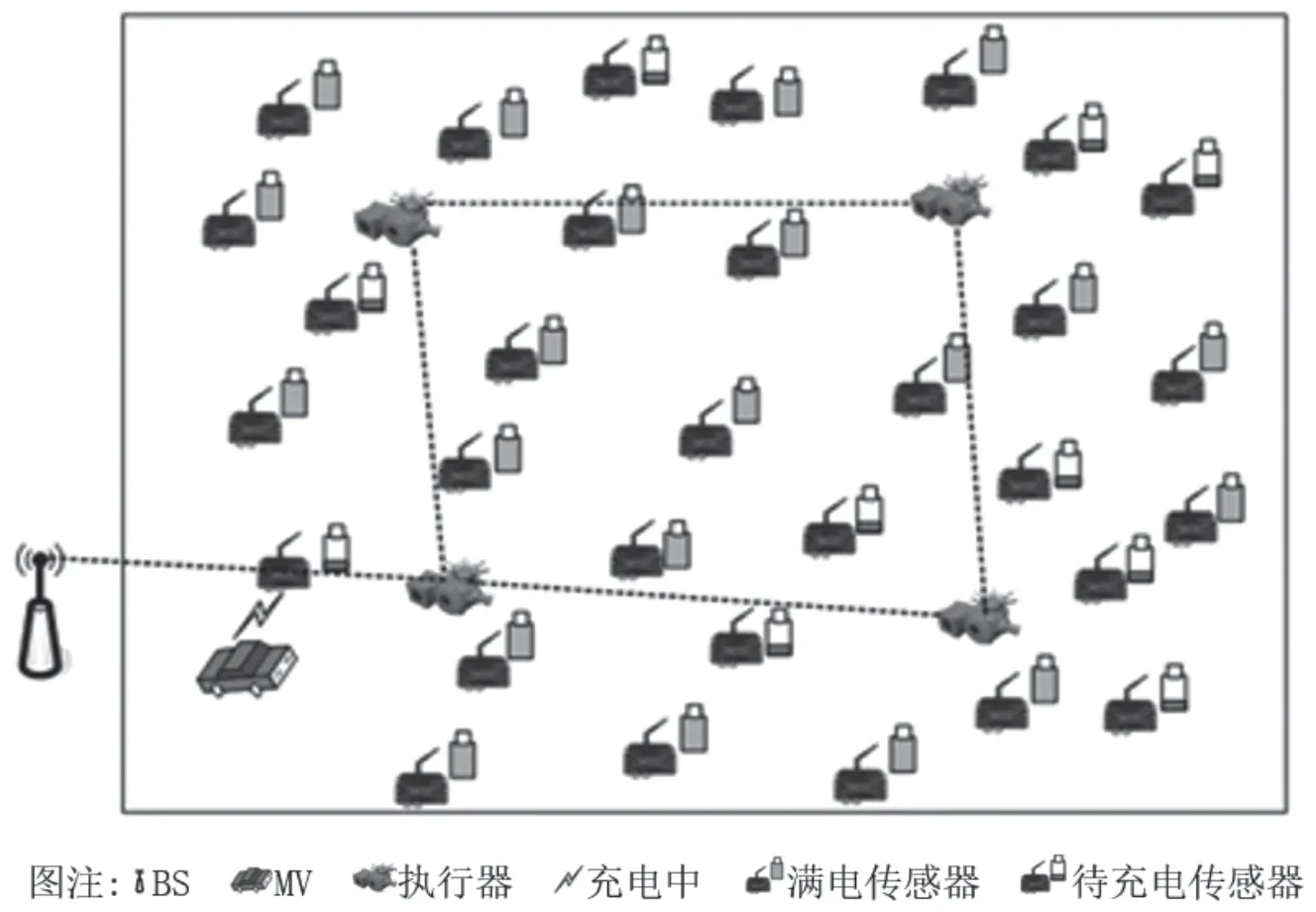
圖1 WSANs網(wǎng)絡(luò)模型
2 基于能耗估計(jì)的網(wǎng)絡(luò)模型
如圖1所示,網(wǎng)絡(luò)由一個(gè)BS、一個(gè)MV、一組傳感器節(jié)點(diǎn)和若干執(zhí)行器節(jié)點(diǎn)組成。集合S={s1,s2,s3,...,sn}表示傳感器節(jié)點(diǎn)集,集合A={a1,a2,a3,...,am}中的節(jié)點(diǎn)為執(zhí)行器節(jié)點(diǎn),其中m遠(yuǎn)小于n。整個(gè)網(wǎng)絡(luò)被劃分為若干個(gè)子網(wǎng),每個(gè)子網(wǎng)中部署一個(gè)執(zhí)行器節(jié)點(diǎn),每個(gè)執(zhí)行器節(jié)點(diǎn)根據(jù)隨機(jī)航點(diǎn)移動(dòng)模型在自己的區(qū)域內(nèi)移動(dòng)。傳感器節(jié)點(diǎn)在整個(gè)網(wǎng)絡(luò)中隨機(jī)分布,不可移動(dòng)。BS位于網(wǎng)絡(luò)中心,其具有足夠的能量和較強(qiáng)的通信能力,可以直接與MV通信。MV是一種強(qiáng)大的充電設(shè)備,它以恒定的速度V在網(wǎng)絡(luò)中移動(dòng)以便及時(shí)為每個(gè)節(jié)點(diǎn)充電。在這里,我們假設(shè)MV的能量足以為網(wǎng)絡(luò)中的節(jié)點(diǎn)充電。
在這個(gè)網(wǎng)絡(luò)中,每個(gè)節(jié)點(diǎn)都持續(xù)監(jiān)測(cè)自己的能量情況。一旦它檢測(cè)到能量小于閾值,它就會(huì)將充電信息及時(shí)發(fā)送給BS,BS及時(shí)轉(zhuǎn)發(fā)給MV,MV負(fù)責(zé)選擇下一個(gè)充電節(jié)點(diǎn)。
每個(gè)節(jié)點(diǎn)的能耗率和同一節(jié)點(diǎn)在不同時(shí)間的能耗是不同的。為了避免節(jié)點(diǎn)死亡,及時(shí)掌握能耗尤為重要。為了讓BS掌握每個(gè)節(jié)點(diǎn)的當(dāng)前能源狀況,每個(gè)節(jié)點(diǎn)定期向BS傳遞包含消息。例如,來(lái)自節(jié)點(diǎn)i的消息格式可以表示為<IDi,REin,tin,task>,其中IDi代表節(jié)點(diǎn)i,REin代表其第n條記錄的當(dāng)前能量值,tin代表該消息的時(shí)間標(biāo)記,task是要執(zhí)行的任務(wù)信息。對(duì)于節(jié)點(diǎn)i,讓Rin代表其當(dāng)前能耗率的估計(jì)值,當(dāng)n=1時(shí):

代入根據(jù)指數(shù)加權(quán)平均法,得:

3 充電算法設(shè)計(jì)
3.1 算法流程
第一步:計(jì)算每個(gè)請(qǐng)求節(jié)點(diǎn)等待的最小值。當(dāng)一個(gè)節(jié)點(diǎn)(如節(jié)點(diǎn)j)被收取為候選節(jié)點(diǎn)時(shí),MV將計(jì)算其他剩余請(qǐng)求節(jié)點(diǎn)的最短等待時(shí)間。如果j是一個(gè)傳感器節(jié)點(diǎn),則節(jié)點(diǎn)i的最小等待時(shí)間命名為W(j,i),如式(3):

當(dāng)j是一個(gè)執(zhí)行器節(jié)點(diǎn)時(shí),為了減少該執(zhí)行器充電過(guò)程中的死節(jié)點(diǎn)數(shù)量,有w(j,i):

其中t(M V,j)和t(j,i)分別代表M V從M V當(dāng)前位置到節(jié)點(diǎn)j的行駛時(shí)間和M V從節(jié)點(diǎn)j到節(jié)點(diǎn)i的行駛時(shí)間。、分別表示MV對(duì)傳感器節(jié)點(diǎn)和執(zhí)行器節(jié)點(diǎn)的充電時(shí)間,E和E'代表傳感器節(jié)點(diǎn)和執(zhí)行器節(jié)點(diǎn)的電池容量。α為0~1之間的參數(shù),aE'代表執(zhí)行器的充電上限。REj(t)表示節(jié)點(diǎn)i的最新剩余能量值,Rj為其能量消耗率,tj為節(jié)點(diǎn)j發(fā)送最后一次充電請(qǐng)求的時(shí)間,μ為MV的充電速率。
第二步:統(tǒng)計(jì)死節(jié)點(diǎn)數(shù)。當(dāng)節(jié)點(diǎn)j作為候選節(jié)點(diǎn)時(shí),在當(dāng)前時(shí)間t內(nèi),確保節(jié)點(diǎn)i不死,要求,即當(dāng)節(jié)點(diǎn)j即將被充電時(shí),節(jié)點(diǎn)i不會(huì)死亡。當(dāng)j要充電時(shí),死掉的節(jié)點(diǎn)總數(shù)被命名為Nnum,i。
第三步:計(jì)算一個(gè)節(jié)點(diǎn)到另一個(gè)節(jié)點(diǎn)路程。由于傳感器節(jié)點(diǎn)是靜止的,因此可以很容易地計(jì)算出任意兩個(gè)傳感器之間的距離。但是對(duì)于執(zhí)行器節(jié)點(diǎn)而言,為了計(jì)算傳感器與執(zhí)行器之間的路程,首先必須確定執(zhí)行器的當(dāng)前位置坐標(biāo)。讓(xg,yg)、(xp,yp)分別代表執(zhí)行器節(jié)點(diǎn)的起始位置G和下一個(gè)目標(biāo)位置P的坐標(biāo)。C為執(zhí)行器節(jié)點(diǎn)在時(shí)間t的當(dāng)前位置,有:

其中,yc可以類比得出。tg代表執(zhí)行器節(jié)點(diǎn)離開G的時(shí)間,之后可以計(jì)算出任意兩個(gè)節(jié)點(diǎn)之間的距離。
第四步:計(jì)算充電度量值。現(xiàn)在我們計(jì)算每個(gè)節(jié)點(diǎn)的充電度量值,用于下一步充電節(jié)點(diǎn)的選擇。對(duì)于節(jié)點(diǎn)i,度量值為的倒數(shù)。
其中distance(MV,i)表示MV與節(jié)點(diǎn)i之間的距離,β為權(quán)重系數(shù)。MV根據(jù)這個(gè)充電指標(biāo)值選擇下一個(gè)節(jié)點(diǎn)。通常情況下,選擇度量值最大的節(jié)點(diǎn)作為候選節(jié)點(diǎn)。因?yàn)槎攘恐翟酱螅琋num,i和distance(MV,i)的值越小。也就是說(shuō),造成死節(jié)點(diǎn)較少,且距離MV較近的節(jié)點(diǎn)更有可能首先被充電。
第五步:考慮應(yīng)急執(zhí)行器。在我們的算法中,為了保證應(yīng)急執(zhí)行器節(jié)點(diǎn)及時(shí)充電,每個(gè)執(zhí)行器節(jié)點(diǎn)都不斷更新自己的能量數(shù)值。一旦它檢測(cè)到自己的剩余能量低于臨界閾值δ,它就會(huì)及時(shí)發(fā)送緊急信息給BS,BS立即將緊急信息傳送給MV,然后MV選擇這個(gè)執(zhí)行器作為下一個(gè)充電節(jié)點(diǎn)。如果有一個(gè)以上的執(zhí)行器節(jié)點(diǎn)在緊急情況下,MV優(yōu)先考慮最先發(fā)出緊急信息的執(zhí)行機(jī)構(gòu)。
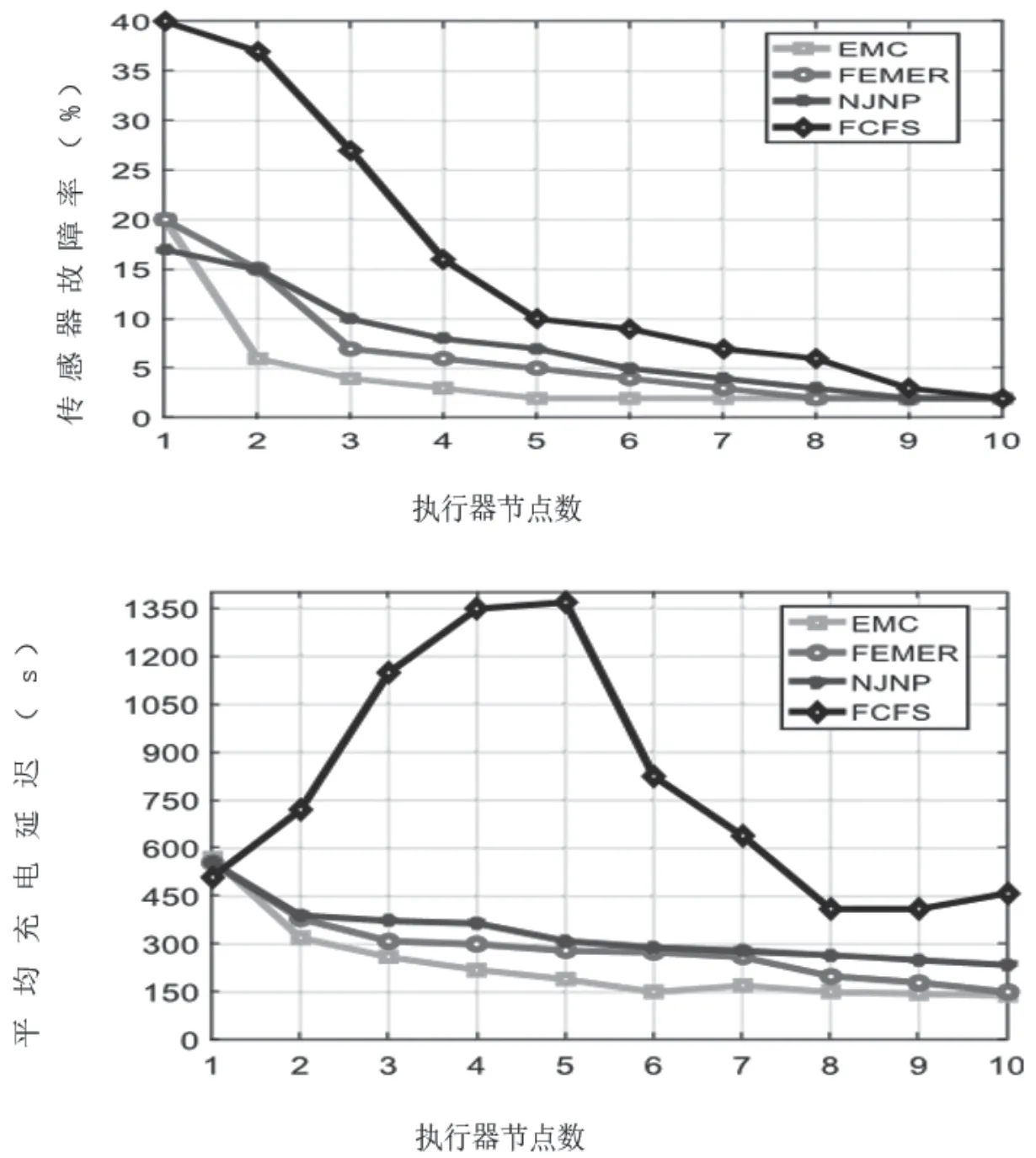
圖2 算法的表現(xiàn)評(píng)價(jià)對(duì)比

3.2 執(zhí)行器節(jié)點(diǎn)跟蹤策略
由于執(zhí)行器節(jié)點(diǎn)始終處于移動(dòng)狀態(tài),因此需要預(yù)測(cè)執(zhí)行器的充電位置,然后實(shí)行充電。假設(shè)選擇執(zhí)行器i作為下一個(gè)充電節(jié)點(diǎn),MV首先會(huì)檢查distance(MV,i)是否小于V與Ti,s的乘積。其中,Ti,s為執(zhí)行器在源點(diǎn)S的停留時(shí)間,如果滿足該公式,則說(shuō)明MV到達(dá)S點(diǎn)時(shí),執(zhí)行器i暫時(shí)沒(méi)有離開這里,所以MV選擇對(duì)S點(diǎn)的執(zhí)行器節(jié)點(diǎn)進(jìn)行充電;如果不為真,則MV應(yīng)直接移動(dòng)到執(zhí)行器i的下一個(gè)目的地點(diǎn)D前,當(dāng)執(zhí)行器i到達(dá)那里時(shí),對(duì)其進(jìn)行充電。一旦執(zhí)行器i移動(dòng)到遠(yuǎn)離MV的充電范圍,要繼續(xù)進(jìn)行充電,MV要檢查distance(MV,i)小于V與Ti,s的乘積是否成立。
式(6)中v'為執(zhí)行機(jī)構(gòu)的移動(dòng)速度,Ti,D為在D點(diǎn)的停留時(shí)間,如果式(6)為真,MV應(yīng)移動(dòng)到D點(diǎn),繼續(xù)給執(zhí)行機(jī)構(gòu)i充電;如果不移動(dòng),MV必須停留在S點(diǎn),因?yàn)楫?dāng)MV到達(dá)D點(diǎn)時(shí),執(zhí)行機(jī)構(gòu)i不在那里。只有當(dāng)MV獲得下一個(gè)目的地的地理信息時(shí),它將移動(dòng)到那里來(lái)充電。當(dāng)執(zhí)行器i離開時(shí),MV會(huì)繼續(xù)尋找下一個(gè)執(zhí)行器。根據(jù)公式(6),在充電位置對(duì)執(zhí)行器i進(jìn)行充電,直到其剩余的電量達(dá)到一定程度,能量達(dá)到上限。
4 仿真實(shí)驗(yàn)
以Java作為EMC功能測(cè)試的對(duì)象,與FCFS、NJNP和FEMER相比,從傳感器故障率(%)、平均充電延遲(單位s)兩個(gè)方面通過(guò)對(duì)比來(lái)對(duì)EMC的性能實(shí)行評(píng)定。在仿真中,我們將執(zhí)行器節(jié)點(diǎn)的數(shù)量從一增加到十個(gè)。如圖2所示,四種算法的傳感器故障率隨著執(zhí)行器節(jié)點(diǎn)數(shù)量的增長(zhǎng)而增長(zhǎng)。EMC的表現(xiàn)優(yōu)于FCFS、NJNP和FEMER策略,首先,這是因?yàn)槲覀冊(cè)O(shè)置了執(zhí)行器的充電上限閾值,可以有效降低執(zhí)行器充電時(shí)間過(guò)長(zhǎng)而導(dǎo)致的傳感器節(jié)點(diǎn)故障。其次,這是因?yàn)槲覀兛梢詫?duì)能量貯存的情況進(jìn)行估計(jì),根據(jù)預(yù)測(cè)值合理選擇下一個(gè)充電節(jié)點(diǎn)。四種方案的平均充電延時(shí)如圖2。除了FCFS的充電延遲先增加后減少外,其他方案的充電延遲隨充電節(jié)點(diǎn)數(shù)量的增加而增加。在EMC中,由于執(zhí)行器節(jié)點(diǎn)有充電上限,可避免傳感器死亡,所以它在四種算法中具有明顯的優(yōu)勢(shì)。
結(jié)論:本文描述了一種新型的移動(dòng)能量補(bǔ)充方法,根據(jù)預(yù)測(cè)各節(jié)點(diǎn)當(dāng)前的能量狀況及其與MV的距離進(jìn)行充電節(jié)點(diǎn)選擇。EMC有效減少了平均充電延遲,降低了傳感器的故障率。