基于深度學習的電梯故障預警研究與應用
2021-04-11 14:56:30蘭州資源環境職業技術學院車明浪楊添璽
電子世界 2021年6期
蘭州資源環境職業技術學院 車明浪 楊添璽
準確可靠快速的故障預警方法是電梯安全運行的關鍵。針對電梯故障預警問題,為有效預防和減少電梯安全隱患,本文所提CKFRBF預測方法具有更精確的預測結果和更短的預測時間。對于電梯及相關特種設備的故障預警系統的設計與開發具有一定的參考意義。
隨著我國經濟的快速發展和城鎮化水平的不斷提高,樓房的高層化和現代化的大幅度提升,作為高層建筑中應用最廣泛的主要的垂直交通工具,電梯的數量與需求增加迅猛。然而,電梯事故的頻繁發生,對人們的日常使用產生很大的影響,更是對人們的生命安全構成了一種威脅。如何準確可靠快速的對電梯故障進行預警具有非常重要的意義。
針對相關故障及預警問題,相關的新方法新技術相繼產生。除了進行實時監控,還可以提前預知電梯故障并為維保人員提供決策建議,加快電梯維修進度。由此可見,基于深度學習的神經網絡方法以其預測精度高、具有較強的非線性映射能力等優點在電梯故障預警中體現出很好的效果,為電梯故障預警提供了新思路新方法。本文為進一步提高電梯故障預警的效率和精確率,提出了一種容積卡爾曼濾波(CKF)輔助優化徑向基神經網絡(RBF)的電梯故障預警方法。
1 電梯系統故障預警方法需求分析
電梯故障因素分析及預警是通過對大量的電梯故障歷史信息進行統計分析,得到監管者所關心的電梯故障的發生情況,從而為電梯監管者管理電梯安全提供輔助信息。基于深度學習的電梯故障預警方法關鍵在于精準快速預測,其通過各類相關傳感器收集電梯的基本運行數據以及核心部件的狀態數據,對收集到的數據進行處理和存儲,建立神經網絡預測模型,并通過不斷地訓練優化讓模型變得更加精確,從而達到電梯故障預警的目的。根據各個電梯之間的相似性,預測出電梯可能發生故障的類型,進而故障預警,所以對于相關系統,故障預警算法應能實現以下功能:(1)通過對電梯故障數據進行分析,對電梯最有可能發生故障的類型進行預警;(2)對故障診斷,快速可靠準確的確定故障原因。因此本文討論的重點是如何通過神經網絡方法來實現電梯預警。
2 基于RBF神經網絡的電梯故障預測方法
RBF是一個前饋網絡,包含一個輸入層、一個隱含層和一個輸出層。其訓練過程可以概括為兩個步驟,首先確定隱含層中使用的RBF特征,然后確定輸出神經元的權重。在隱含層中,通過改變權值和偏差來減小位置和速度的預測誤差。在輸出層,預測信息通過隱含層轉發到輸出層的節點,由輸出層計算隱含神經元的線性和。該網絡能夠較為準確的預測出運行中系統中出現的故障。圖1為RBF神經網絡模型結構。
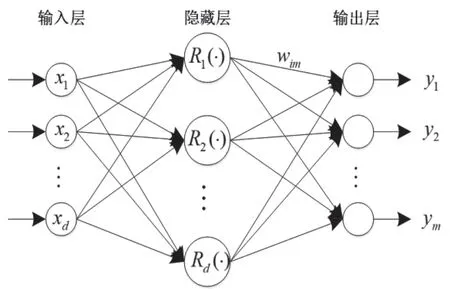
圖1 RBF神經網絡模型
在這里,用一個在RBF中高斯函數作為隱藏層的激活函數來進行計算:
RBF的預測輸出為RBF的線性和:

其中y是RBF的輸出,為每個神經元i的權重,為基函數向量,o為網絡輸出單元數。
3 所提CKF輔助優化RBF神經網絡的電梯故障預測方法
3.1 CKF算法
CKF算法的基本原理是利用三階球相容積法則來逼近非線性函數的后驗均值和協方差,同時,利用容積點進行數值計算積分。因此,容積點的權重為正,計算成本較低。該算法分為時間更新和量測更新兩部分。
(1)時間更新
計算方差和容積點的平方根:

如:
對任意函數f(x),將容積點代入可得估計值:


其中ωi表示隨機權重,并且。
(2)量測更新
計算更新量測時,需要確定當前時刻的容積點:

然后,得到容積點對應的輸出值:


相關的協方差:
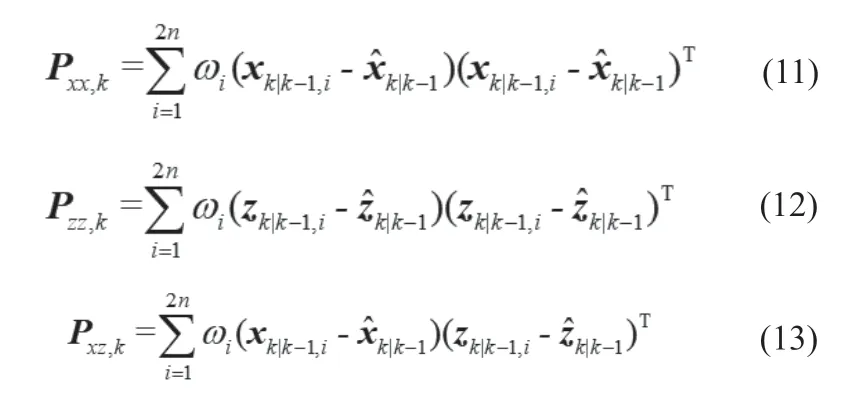
獲得k時刻狀態誤差的濾波增益、狀態估計和協方差估計:
3.2 CKF-RBF預測方法
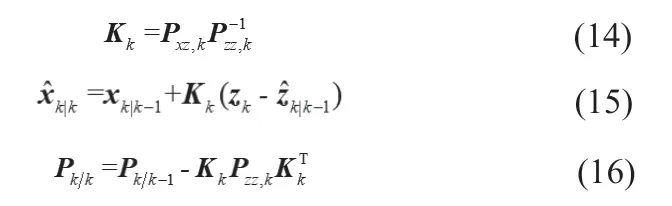
單一的RBF神經網絡在進行訓練時很難選擇最優的內部結構(具有適當的隱藏層權重和每層神經元的數量),并且容易出現過擬合欠擬合現象,導致預測結果出現較大的誤差,這是所有神經網絡的共有缺陷。本節針對這一問題,提出一種利用CKF輔助RBF的方法,在RBF訓練過程中需要調整隱含層和輸出層的權值,設計CKF作為RBF本身的輸出層的權重優化的優化器并將RBF輸出層產生的網絡誤差最小化,而隱藏層的權重則采用標準的RBF來計算;同時,對相關參數進行優化,能在一定程度上解決神經網絡的梯度爆炸問題,減小計算成本。所提CKF-RBF的結構如圖2所示。
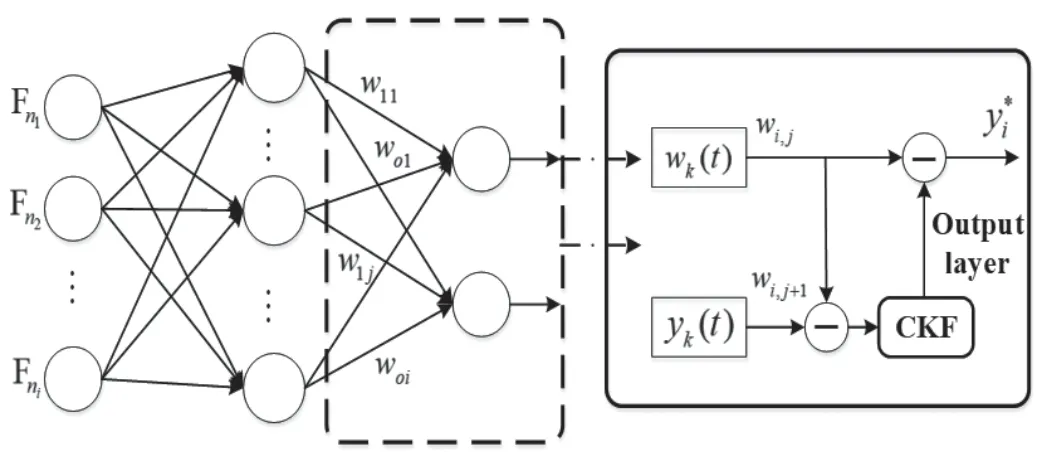
圖2 所提CKF-RBF算法結構
假設連接到節點k的輸出層的權值為狀態向量,節點k的輸出結果為測量向量。節點k處的狀態空間和測量方程可以表示為:

假設yk(t+1)=ykd(t+1),這表明節點k在t+1時刻的期望輸出等于t+1時刻的量測值。根據最小化預測輸出和測量輸出的殘差的原則,可以建立性能指標函數為:

式中,wk(t)是在訓練迭代t時,連接到輸出層的節點k的權向量;G(wk(t))是模型誤差的攝動矩陣;Dk(t)是在訓練迭代t時連接到輸出層節點k的模型誤差向量;A為半正定模型誤差加權矩陣,ykd(t)是訓練迭代t時的測量輸出;和分別為估計權值輸出層和輸出節點k在訓練迭代t時的預測;xj(t)隱含神經元在迭代t時的輸出;為非線性函數。
當性能指標函數J取最小值時,利用式(18)可以得到模型誤差估計:

只考慮節點k的權值更新條件,度量維度(m=1),則為:
當測量向量維數m=1時,為常數并可計算為:
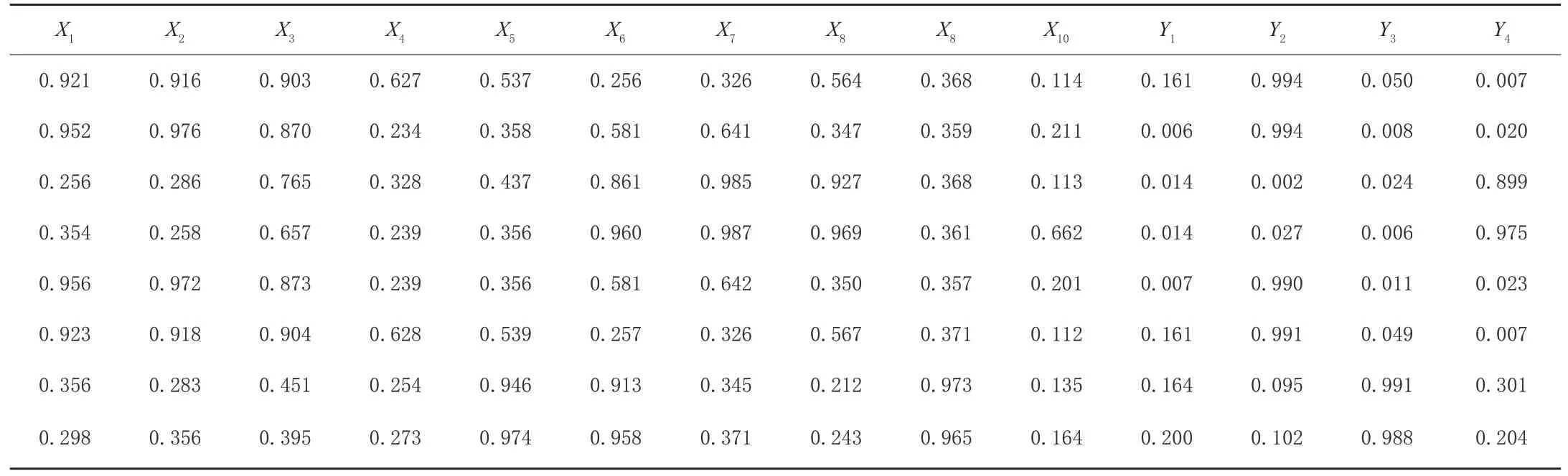
表1 RBF神經網絡預測模型預測結果 (實驗方案A)

表2 CKF輔助優化的RBF神經網絡預測模型預測結果 (實驗方案A)

表3 RBF與CKF優化的神經網絡預測模型均方誤差、訓練次數和預測時間對比 (實驗方案A)
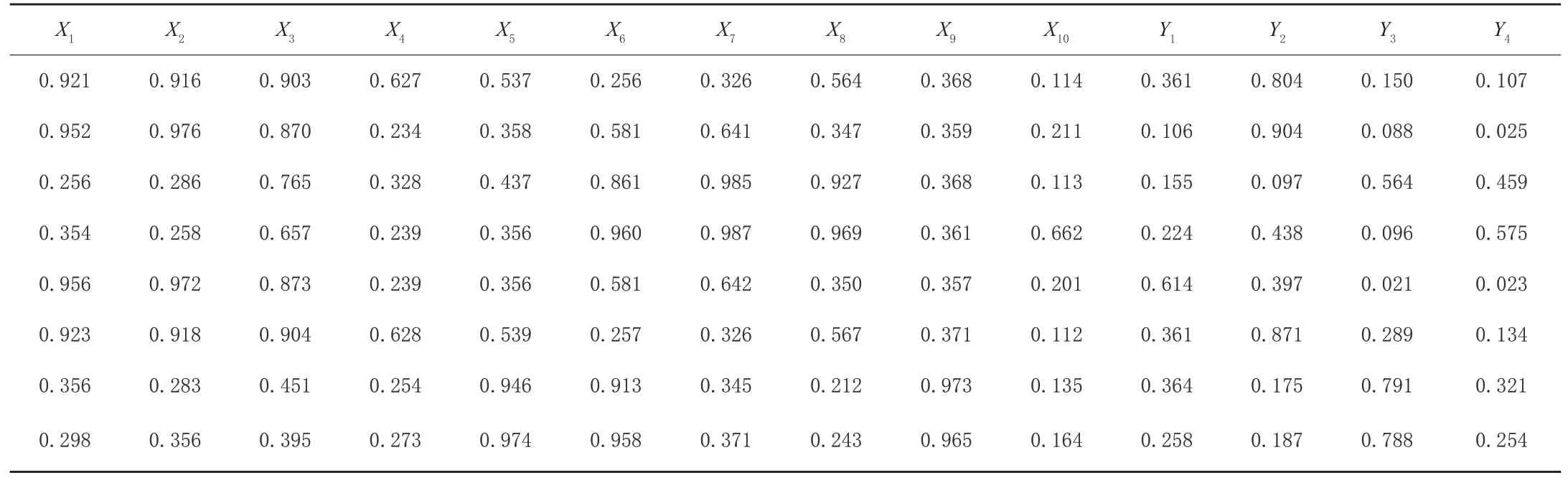
表4 RBF神經網絡預測模型預測結果 (實驗方案B)
式中,gj表示G的第j列j=1,2,...,q。利用式(19)所計算的模型誤差對非線性系統模型進行校正,得到包含模型誤差的新的權值預測估計為:

式(25)表明CKF-RBF可以在CKF的預測步驟中自適應地提高狀態估計誤差。
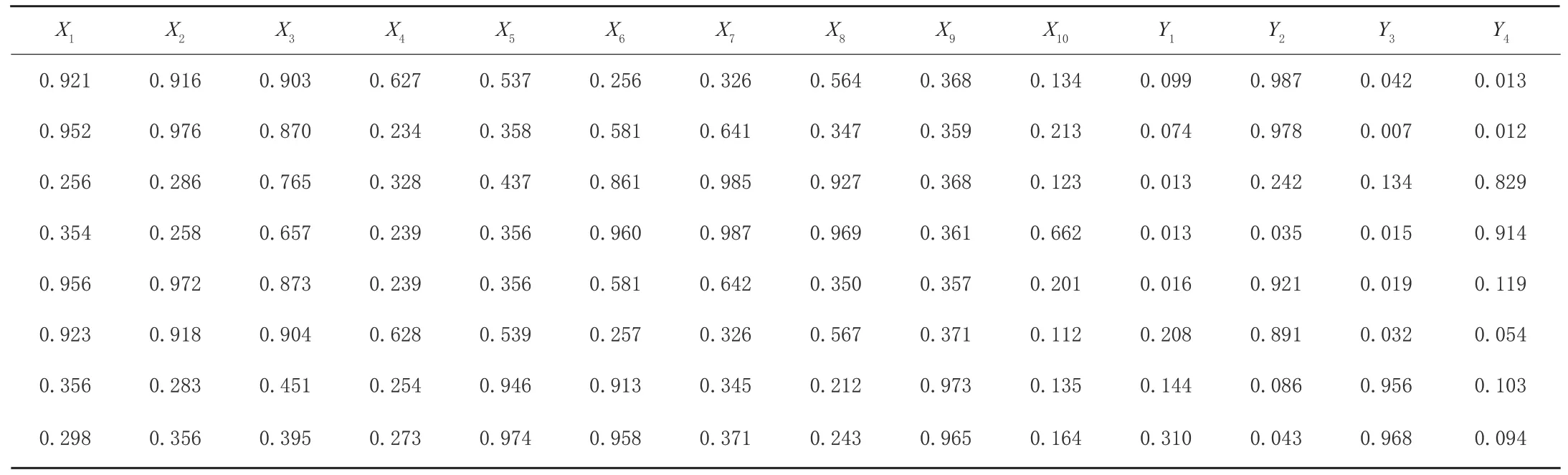
表5 CKF輔助優化的RBF神經網絡預測模型預測結果 (實驗方案B)

表6 RBF與CKF優化的神經網絡預測模型均方誤差、訓練次數和預測時間對比 (實驗方案B)
4 實驗驗證
實驗數據選取自電梯運行監控預警系統的數據收集模塊獲取到的電梯運行參數數據集,共3658條。其中,2658條作為預測模型實驗訓練輸入數據,其他的1000條作為實驗測試輸入數據。每條數據包含10個輸入變量,這10個輸入變量是從電梯眾多運行參數中選擇的10個對預測結果影響較大的主要特征,包括:電梯運行時間、電梯運行速度、電梯運行方向、電梯轎廂噪聲、井道噪聲等特征參數,設置為X1,X2,...,X9,X10。在選擇輸出參數時,選取數據集中發生次數較多的四種故障類型作為預測模型的輸出,分別為:電梯沖頂故障、電梯蹲底故障、電梯運行超速故障和電梯運行時間超長故障,設置為Y1,Y2,Y3,Y4。選擇現有的標準RBF神經網絡算法與本文所提的CKF輔助RBF神經網絡的方法進行預測模型對比實驗。因選取的輸入數據為10個維度的參數,故神經網絡模型輸入層神經元節點個數為10;訓練數據的輸出含有4個維度的特征參數,故模型輸出層神經元節點個數為4;隱含層神經元節點的個數則由算法訓練優化決定,CKF輔助優化的RBF神經網絡則是采用圖2中的算法步驟進行結構調整優化。為了驗證所提方法的有效性和先進性,設計了兩種對比實驗方案:方案A:利用全部的2658條訓練數據對兩種方法進行訓練,即在訓練樣本充足的情況下進行訓練,比較兩種預測方法的預測精度;方案B:在總訓練樣本中選取三分之一的樣本作為實驗中的訓練樣本,即在訓練樣本不足的情況下進行訓練,比較兩種預測方法的預測精度。實驗方案A中兩種預測方法的對比試驗結果如表1和表2所示,表3為兩種算法預測均方誤差、訓練次數和預測時間的對比。實驗方案B中兩種預測方法的對比試驗結果如表4和表5所示,表6為兩種算法預測均方誤差、訓練次數和預測時間的對比。
通過表1和表2的按照實驗方案A進行實驗的兩種神經網絡模型預測結果對比可知,在訓練樣本充足的情況下,兩種預測模型的準確度都比較高,可較為準確的預測出故障的發生,表明RBF神經網絡算法在電梯故障預測領域的可行性,并且利用CKF優化的RBF神將網絡模型的預測精度稍高。而通過表3的對比實驗結果表明,利用CKF優化的RBF神經網絡模型較標準的單一RBF神經網絡模型在預測準確性和算法收斂速度上都有較好的提升。
通過表4和表5的按照實驗B進行實驗的兩種神經網絡模型預測結果對比可以看出,在訓練樣本較少的情況下,本文所提的利用CKF優化的RBF神經網絡模型的優勢更為明顯;而通過表6的對比實驗結果可以看出,在訓練樣本較少的情況下,利用CKF優化的RBF神經網絡模型無論在預測精度、算法收斂速度上,還是在預測時間上,都遠優于標準的單一RBF神經網絡模型。
結論:本文基于深度學習提出了一種CKF輔助優化RBF神經網絡的電梯故障預警方法,利用CKF的優點來優化調整RBF神經網絡模型的結構和參數,有效的避免了單一神經網絡過擬合欠擬合不穩定的缺點,提高了故障預警的精度和效率,具有一定的參考價值和實際工程意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
汽車維護與修理(2016年10期)2016-07-10 08:17:41
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
小說月刊(2015年4期)2015-04-18 13:55:18
汽車維修與保養(2015年6期)2015-04-17 03:31:50