某型飛機方向舵偏角限制裝置故障分析
2021-04-12 11:47:44劉國慶劉菊紅
航空維修與工程 2021年3期
劉國慶 劉菊紅
摘要:某型飛機方向舵偏角限制裝置機上地面調試時不滿足性能指標要求。通過對限偏裝置的原理分析、方向舵操縱系統原理分析、方向舵操縱系統安裝、剛度檢查及方向舵操縱系統傳動檢查,結合檢查和分析結果得出故障原因,擬定故障解決方案并在機上調試,成功排除了故障。該經驗可為類似限偏裝置系統的設計、安裝、調試工作提供參考。
關鍵詞:方向舵;舵偏轉限幅器;公差
Keywords:rudder;rudder deflection limiter;tolerance
1 故障描述
某型飛機采用方向舵偏角限制裝置(下稱限偏裝置)來限制方向舵在不同空速下的最大偏轉角度[1],以防止在大速度下方向舵偏度過大導致方向舵載荷超過結構強度限制[2]。方向舵偏角限制規律如圖1所示。不同空速下對應的限制偏度公差如表1所示。
在對限偏裝置進行機上地面調試時,發現大部分角度公差不能滿足要求,具體如表2所示。
2 方向舵偏角限制裝置
2.1 限偏裝置工作原理
在起飛及降落階段飛機的速度較慢,這時方向舵的效率較低,飛機需要較大的方向舵偏角來對準跑道,若存在大側風時甚至會用到方向舵滿偏角度來糾偏;但在高速飛行情況下,隨方向舵偏轉而增加的氣動面載荷非常大,常常會超過機體結構所能承受的載荷,因此需要根據空速來限制方向舵的最大偏角。在機械無助力的飛行操縱系統中,飛行員能發出的最大力是有限的,因此也就自動滿足了方向舵限偏的要求;但在不可逆機械助力或電傳飛控系統中[3],飛行員并不能直接感受到方向舵上的氣動載荷,因此在高速情況下必須對方向舵的偏角予以限制以保證飛行安全。
方向舵限偏裝置工作原理如圖2所示。電動機構的活塞桿伸出或收回改變菱形四連桿機構的形狀,使止動點與活塞桿軸線的距離增加或減少,從而限制旋轉搖臂的最大轉動角度。
2.2 限偏裝置與系統的交聯
限偏裝置并聯在方向舵操縱系統傳動線系中,如圖3所示。限偏裝置的旋轉搖臂與腳蹬的協調轉軸固連在一起,根據限偏裝置的原理,當限偏電動機構的活塞桿伸出或收回時,腳蹬協調轉軸的最大偏轉角度也因此改變,相當于限制了腳蹬的最大操縱行程,最終決定了方向舵的最大偏轉角度。
3 故障分析
3.1 限偏電動機構安裝偏差
根據表2中方向舵偏度結果,大部分不合格的數值都是在操縱左腳蹬時出現,且操作副駕駛左腳蹬時方向舵偏角比操作主駕駛左腳蹬時方向舵偏角要小。經過理論計算,在方向舵偏度6.5°狀態時,如果方向舵偏角限制電機在航向方向偏差1mm,會引起副駕駛腳蹬位置與理論位置產生2mm的偏差。從腳蹬位移測量結果反推,方向舵偏角限制電機安裝位置與圖紙偏差1mm。
3.2 系統剛度問題
駕駛艙地板結構的剛度較差,且限偏裝置安裝在副駕駛腳蹬協調轉軸下,從副駕駛腳蹬協調轉軸到助力器的傳動路徑長,從正駕駛腳蹬協調轉軸到助力器的傳動路徑短,因此操作正駕駛腳蹬和操作副駕駛腳蹬的剛度是不一致的。
空速為254km/h時,主駕駛操縱腳蹬時方向舵的左偏度比副駕駛操縱腳蹬時方向舵的左偏度大0.6°,主駕駛操縱腳蹬時方向舵的右偏度比副駕駛操縱腳蹬時方向舵的右偏度大0.56°。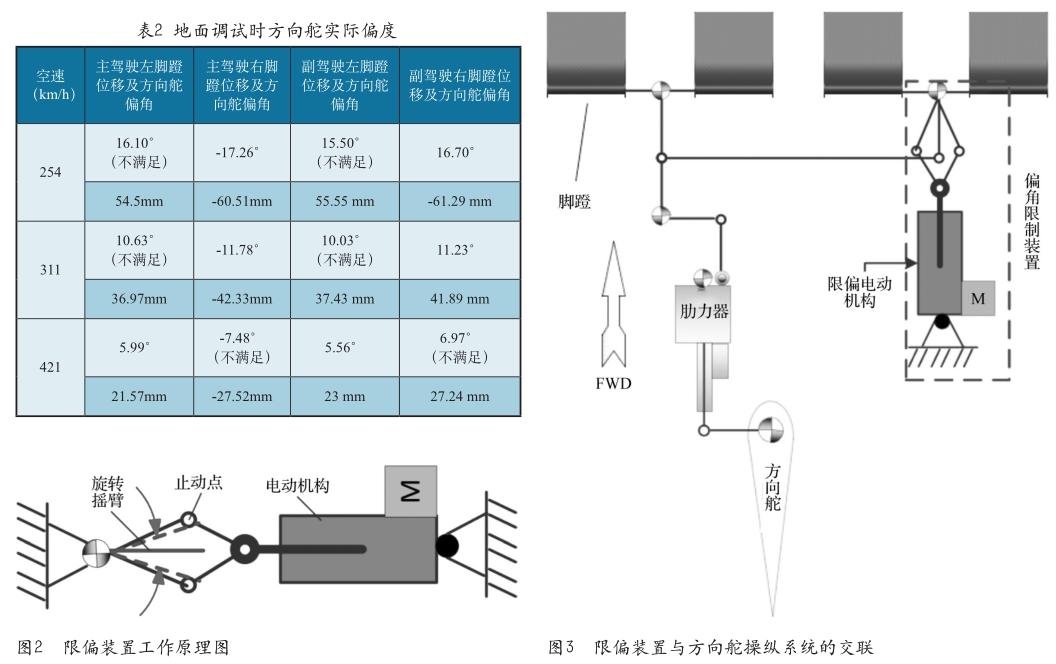
空速為311km/h時,主駕駛操縱腳蹬時方向舵的左偏度比副駕駛操縱腳蹬時方向舵的左偏度大0.6°,主駕駛操縱腳蹬時方向舵的右偏度比副駕駛操縱腳蹬時方向舵的右偏度大0.55°。
空速為421km/h時,主駕駛操縱腳蹬時方向舵的左偏度比副駕駛操縱腳蹬時方向舵的左偏度大0.43°,主駕駛操縱腳蹬時方向舵的右偏度比副駕駛操縱腳蹬時方向舵的右偏度大0.51°。
腳蹬的行程越大,需要的腳蹬操作力越大。主、副駕駛在同一空速下對應的方向舵偏度差別與腳蹬力大小有關,從表2中可以看出。腳蹬行程越大即腳蹬力越大,方向舵偏度差別就越大。
3.3 系統空行程
對方向舵操縱系統的調整是在系統未通壓的情況下進行的,由于方向舵操縱系統的傳動路徑較長,系統的空行程較大,在未通壓下將系統調整到中立位置,當系統通壓后會發現方向舵相對于理論中立位置向左偏離了近1°。
4 解決措施
由于限偏裝置在機上已經安裝完畢,機上安裝維護空間非常狹小,如果要對其進行重新定位,勢必要拆除附近多個設備,考慮到實施周期過長,暫不采取該措施。國內其他飛機限偏裝置的安裝位置一般都非常靠近助力器,這是為了避免系統各部分剛度不一致問題,如果要將限偏裝置從駕駛艙位置挪到垂尾助力器前,還需對結構進行開口,且線束也需做大的更改,因此也不采取該措施。
根據表2的實測數據和允許的公差,擬先對方向舵操縱系統進行通壓調整,盡量提高方向舵操縱系統在中立位置時的精度。再針對每個空速檔位的超差情況,更改限偏裝置電動機構的活塞桿行程,以補償其超差部分。
4.1 通壓調整系統
在系統通壓情況下,對方向舵操縱系統進行中立位置基準調零。在此基礎上對方向舵偏角限制裝置的測試結果如表3所示。從表3中可以看出,不滿足的項數明顯減少,且都是在操作副駕駛時才出現超差情況。對于空速421km/h對應的檔位已經滿足設計要求,不需要進行調整。
測試結果顯示,254km/h檔位偏小,311km/h檔位偏小,因此,在254km/h檔位上,若對方向舵偏角增加0.48°,方向舵偏角將全部滿足設計要求。在311km/h檔位上,若對方向舵偏角增加 0.42°,方向舵偏角將全部滿足設計要求。
根據傳動比計算,方向舵在254km/ h檔位上增加0.48°的偏角,電機輸出應該增加1.012mm。方向舵在311km/h檔位上增加0.42°,電機在175節檔位時的電機輸出應該增加0.658mm。
4.2 限偏裝置電動機構控制更改
更改限偏裝置電動機構的輸出行程后,均勻緩慢地蹬腳蹬,得出方向舵偏角限制裝置工作狀態下方向舵偏度的測試結果,如表4所示。
由于系統空行程的存在,使得在快速操縱腳蹬時方向舵的偏度會存在部分超差。快速操縱腳蹬時的方向舵偏度如表5所示。
快速蹬腳蹬時,311km/h檔位超過了公差0.04°,421km/h檔位超過了公差0.39°。在311km/h檔位時,如果將方向舵偏度減小0.21°,在各種操縱狀態下都將滿足要求。針對421km/h檔位出現的現象,根據以往的調試結果,如果再向下調整容易出現計算機指令與電機的電位計行程不匹配,因此不針對421km/h檔位再調整。更改電機輸出行程后的方向舵偏度測試結果如表6所示,所有結果均在要求的公差范圍內。
5 結論
針對方向舵偏角限制裝置的故障,從限偏裝置原理出發,結合交聯的方向舵操縱系統原理進行分析,確定故障原因。本文并未直接針對引起故障的原因進行調整和修正,而是根據實際的施工難度及進度,從其他容易實施的措施來間接解決系統故障,在解決問題時應跳出“修正引起故障的原因來消除故障”這一思維的禁錮。本文對今后相似系統的設計提供了經驗參考,應極力避免類似問題的出現。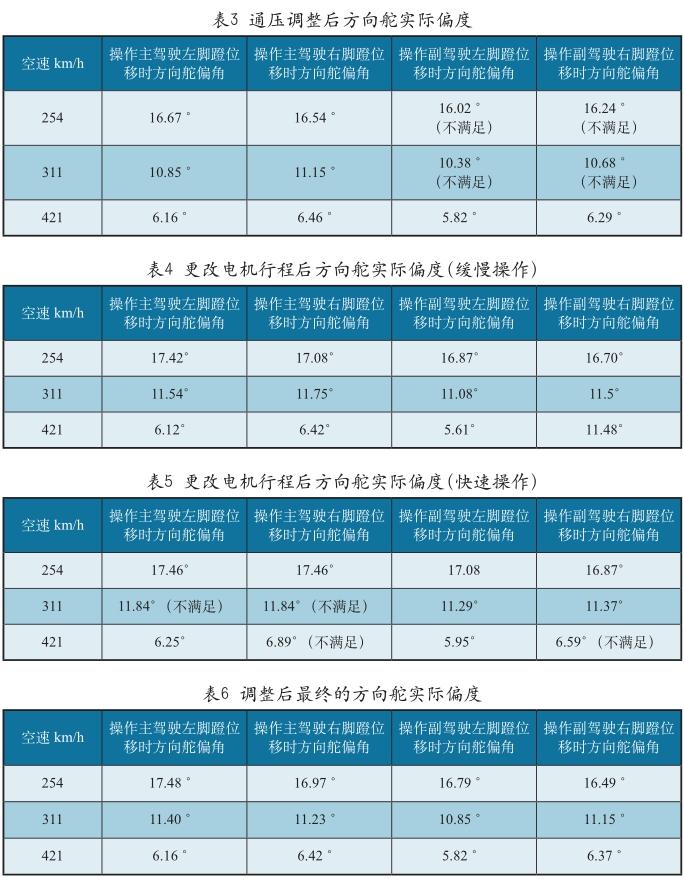
參考文獻
[1]《飛機設計手冊》總編委.飛機設計手冊第6冊 氣動設計[M].北京:航空工業出版社,2002.
[2] 《飛機設計手冊》總編委會編.飛機設計手冊第9冊 載荷、強度和剛度[M].北京:航空工業出版社,2001.
[3] 徐鑫福,馮亞昌.飛機飛行操縱系統[M].北京:北京航空航天大學出版社,1989.
作者簡介
劉國慶,高級工程師,研究方向為飛機飛行控制系統設計。
劉菊紅,研究員,研究方向為飛機飛控總體設計。