基于無人機可見光與激光雷達的甜菜株高定量評估
2021-04-13 09:31:14車熒璞柴宏紅李保國馬韞韜
農業機械學報 2021年3期
關鍵詞:系統
王 慶 車熒璞 柴宏紅 邵 科 李保國 馬韞韜
(1.中國農業大學土地科學與技術學院,北京 100193;2.內蒙古自治區生物技術研究院農業人工智能與作物表型工程研究中心,呼和浩特 010070)
0 引言
甜菜是主要糖料作物,也是公認的替代玉米進行生物燃料生產的原料之一[1]。隨著世界人口的持續增長,對糖的需求量也持續增加。培育理想品種與充分利用環境條件是提高甜菜單產的關鍵因素[2]。甜菜株高可用于估算根系生物量[3]、指示水分脅迫[4],還可作為甜菜氮含量和產量的有效指示因子[5],是育種者和農田管理者評估大田甜菜生長狀態的重要參數。目前,常用的株高測量為人工方法,費時費力、效率低。
信息技術的發展使得以高通量、無損的方式獲取大田作物的株高成為可能,常用設備包括超聲波傳感器[6-7]、TOF相機[8-9]、激光雷達 (Light detection and ranging,LiDAR)[10-11]、數碼相機[12-13]等。無人機搭載RGB相機估算作物株高是目前使用最廣泛的方法之一[14-17],該方法成本低、時間分辨率高、易于部署,能以較低的飛行高度獲取高空間分辨率圖像,從而用于構建冠層數字表面模型[18],目前已被廣泛應用于高粱[19]、小麥[20]、玉米[21]、棉花[22]的株高估算中。LiDAR具有較高空間分辨率,且不受環境光的影響,具有高度可重復性。LiDAR可以通過單回波或全波形系統來完整描述截獲冠層的輪廓。車載LiDAR已被用于估算棉花[23]、小麥[24]、高粱[25]、花生[26]的株高。無人機搭載LiDAR已被廣泛應用在林業[27-28]、工程測繪[29-30]領域,同時也應用于作物高度的估算[31-32]。相較于車載LiDAR,無人機搭載LiDAR具有機動靈活、工作效率高、不受地面條件限制等特點。
本文以186個不同基因型的大田甜菜為研究對象,研究無人機搭載RGB相機與無人機LiDAR系統在大田作物株高估算上的精度差異,并與人工測量值進行比較。進一步對點云進行分層分析,比較點云在冠層內分布的差異,為田間株高精準表型的獲取和全基因組關聯分析提供依據。
1 材料與方法
1.1 試驗布置與株高測定
田間試驗于內蒙古自治區烏蘭察布市涼城縣(40°30′5″N,112°8′50″E,海拔1 459.24 m)進行。試驗地面積為62 m×19 m,包含186個不同基因型的甜菜育種小區和保護行。每個育種小區面積為1.2 m×2.3 m。播種時間為2019年5月20日。小區內株距0.2 m,各小區間隔0.5 m,所有小區的田間管理一致。于糖分積累期(2019年9月7日)在每個小區中間位置隨機選取4株甜菜,使用米尺測量地面到甜菜自然狀態下最高點的距離作為株高。取4株甜菜株高的平均值作為該基因型甜菜的株高。
1.2 基于無人機平臺的可見光影像與激光雷達數據獲取
由大疆精靈4RTK型無人機(深圳市大疆創新科技有限公司)采集可見光影像數據。該無人機攜帶的相機有效像素為2 000萬,焦距8.8 mm,視場角84°。無人機搭載RGB相機系統飛行高度設置為25 m,主航線上圖像間重疊度設置為80%,主航線間圖像重疊度設置為85%,采樣距離為0.68 cm/像素。試驗田中5個地面控制點(Ground control point, GCP)均勻分布,采用華測RTK(上海華測導航技術有限公司)測量其三維空間位置。
采用M600 Pro旋翼無人機(深圳市大疆創新科技有限公司)搭載RIGEL VUX-1UAV型激光掃描儀(奧地利瑞格公司)獲取多基因型甜菜的三維點云數據。RIGEL VUX-1UAV型激光掃描儀具有多目標回波探測能力,主要參數如表1所示。連接在掃描儀上的Applanix AP20 IMU和位于無人機頂部的全球導航衛星系統(Global navigation satellite system, GNSS)天線記錄飛行方向和GNSS數據。無人機LiDAR系統飛行高度設置為25 m,飛行速度3 m/s。作業前30 min架設GPS基準站,用于后續數據預處理時與機載GPS數據聯合差分獲取飛行平臺的精確位置信息。飛行前5 min,掃描儀處于穩定工作狀態。
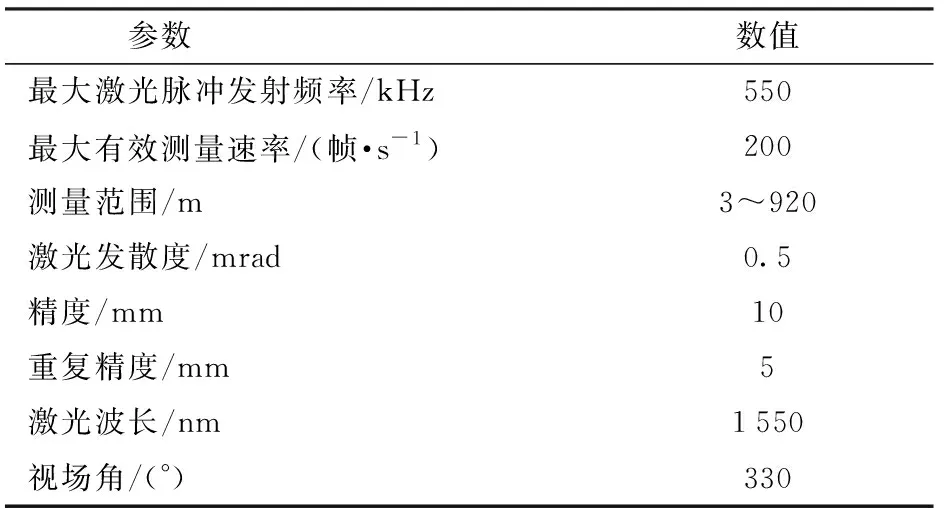
表1 機載激光掃描儀系統參數Tab.1 System parameters of LiDAR
1.3 數據預處理與點云獲取
采用Agisoft Photoscan Professional軟件處理無人機航拍RGB圖像,生成三維點云、數字表面模型(Digital surface model, DSM)和數字正射影像(Digital orthomosaic map, DOM),數據處理流程及結果如圖1所示。無人機RGB數據處理流程為:導入影像數據,輸入像中心點坐標、像元尺寸和相機焦距等參數,對相機的精度進行修正。對齊圖像,導入5個地面控制點(GCP)中心的地理坐標,并在關聯的圖像中進行標記;生成無人機飛行區域的稠密點云,3D點云數據以txt格式導出。在生成的稠密點云基礎上生成DSM和DOM,并將其輸出保存為GeoTIFF文件[33]。
無人機LiDAR系統數據處理包括軌跡數據解算、點云數據配準、點云數據去噪。基于RIEGL自帶的軟件系統將生成的原始數據轉換為點云。圖1b為無人機LiDAR系統數據處理流程:①使用基站提供的差分數據,基于POSPac Mobile Mapping Suite對飛行方向和GNSS數據進行預處理,實現激光數據地理位置的厘米級精度。②基于Riprocess軟件,通過預處理后的軌跡數據將原始數據轉換為地理參考點云,以txt文件格式導出點云數據[34]。
1.4 小區分割、株高自動提取與精度評估
根據試驗設計對田間各個小區進行分割,按其地理位置分配一個唯一編號。首先,根據試驗區域4個頂點坐標和試驗小區數進行均分獲得每個獨立小區。為了避免邊行與其他相鄰小區植株間的相互影響,通過程序將各小區的長邊和短邊自動各裁剪掉20 cm。基于分離出的獨立小區,統計小區內每株甜菜的株高等表型信息。LiDAR點云累積高度的百分位數和無人機搭載RGB相機系統生成的DSM影像的像素百分位數代表了冠層的不同位置,低百分位數代表地面,高百分位數代表冠層上邊界[35]。百分位數是指累積百分位所對應數據的值。為在相同的條件下對比,每個小區均選擇第2分位數作為地面。為了探索冠層上邊界的最佳百分位數,統計點云的累積高度和DSM像素的第95~100分位數(間隔為0.5),與地面分位數作差估算株高,驗證其估算精度。
通過將點云數據按高度分層,比較RGB與LiDAR獲取的甜菜冠層結構的空間特征差異。首先,使用條件濾波器[36]對LiDAR生成的點云數據進行離群點刪除。通過相同步長進行層切:① 用每一層點云數除以冠層點云總數。②將冠層離散為相同大小的立方體,對立方體內的點云從頂部到底部進行累加,獲得冠層不同位置的累積點云分布。以上所有點云數據均用Matlab R2018a處理。
1.5 統計分析
采用決定系數R2、均方根誤差(RMSE)、相對均方根誤差(rRMSE)評價株高實測值與估算值的吻合程度。
2 結果與分析
2.1 株高估算精度評估
基于無人機搭載RGB相機生成的DSM影像和無人機LiDAR點云,以第95~100分位數上的11個百分位數作為上邊界估算株高,與實測株高的R2和RMSE 如圖2所示。從圖2a可看出,兩種方法在11個百分位數估算的株高與實測值均具有較好的相關性,R2都在0.75以上。不同百分位數上R2的變化較小,最小值均為第100分位數。基于RGB相機生成的DSM像素的第96分位數和LiDAR點云高度的第97.5分位數作為上邊界估算的株高與實測株高相關性最好。從圖2b可看出,估算株高與實測株高的RMSE隨百分位數的增加呈先下降后上升的趨勢。基于RGB相機生成的DSM像素的第99.5分位數和LiDAR點云高度的第98.5分位數估算株高時,與田間實測株高的RMSE最小。
選擇RMSE最小時的分位數作為最佳分位數,將兩種方法估算的株高與田間實測株高進行比較(圖3)。結果表明,兩種方法估算的株高與實測株高具有較好的一致性,無人機LiDAR估算的株高更準確。在第98.5分位數時與實測株高相比,基于無人機LiDAR的株高估算精度最高,直線斜率為0.99,R2為0.88,rRMSE為6.6%。此時基于無人機RGB影像生成的DSM估算的株高,直線斜率為0.95,R2為0.8,rRMSE為11%。在第99.5分位數時,基于無人機LiDAR的株高估算精度略有下降,直線斜率為0.99,R2為0.87,rRMSE為8.3%。此時基于無人機RGB影像生成的DSM株高估算精度最高,直線斜率為0.94,R2為0.8,rRMSE為9%。
圖4為186個小區的株高熱力分布圖。其中選取無人機搭載RGB相機生成DSM影像像素的第99.5分位數作為最佳分位數估算株高,選取無人機 LiDAR 點云第98.5分位數作為最佳分位數估算株高。從熱力圖來看無人機搭載RGB相機和無人機LiDAR系統均能夠很好地獲取各類甜菜株高的差異。估算株高的熱力圖趨勢與實測株高熱力圖相似。
2.2 三維點云空間分布比較
圖5為基于無人機RGB和無人機LiDAR生成的三維點云。從圖5a可以看出,無人機RGB系統重建了甜菜小區群體冠層表面的三維結構以及未受旁邊小區遮擋的群體側面三維結構,點云冗余,僅能識別冠層高度的變化。無人機LiDAR系統具有較強的穿透性,能夠較完整地重建甜菜群體冠層結構(圖5b)。
在冠層高度方向上將冠層分為10等份,通過將每層點數除以各冠層總點數對冠層點云數量進行歸一化,進而比較兩種方法重建的三維點云的垂直分布情況(圖6)。總體而言,基于無人機LiDAR系統重建的三維點云在冠層內分布更均勻,其重建的三維點云峰值出現在冠層的第6~7層。無人機RGB系統重建的三維點云其峰值出現在冠層的第8~9層,其余層點云數迅速下降。
為了進一步分析兩種方法得到點云的空間分布情況,對冠層進行層切,展示每一層包含的點云投影到該層底部的分布情況(圖7)。從圖7可以看出,在冠層頂部的第1、2層,兩系統生成的點云具有較高的相似性,在小區輪廓內均有點云分布。相鄰試驗小區間的距離為0.5 m,使得小區間遮擋相對較小。小區內株距均為0.2 m,遮擋嚴重。因此無人機搭載RGB相機只在小區邊界捕獲到一些冠層三維信息,無法捕獲冠層內部的結構信息(圖7a,從冠層頂部開始的第3、4層)。無人機LiDAR系統能夠穿透冠層內部,較好地重建了甜菜冠層整體結構(圖7b,從冠層頂部開始的第3、4層)。
3 討論
本研究選擇RMSE最小時的分位數估算株高[37],估算株高與實測株高相關性最好時并未出現在第100分位數,RMSE先隨百分位數的增加而下降,在接近第100分位數時,RMSE又升高,主要原因是株高測定值均選擇代表小區平均生長狀況的有限取樣的植株,未選擇株高最高和最低的甜菜植株進行測量。無人機RGB相機系統提供了合理的株高估算精度,與實測值的R2達到0.8,RMSE為6.1 cm,rRMSE為9% (圖3),較其他研究精度略有下降[20,37]。可能的原因是為了在相同條件下對比,兩種方法均選擇了第2分位數作為地面位置,與冠層表面分位數作差估算株高。由于植株生長后期冠層封閉,無人機RGB相機沒有獲得足夠數量的地面點,使地面估算存在誤差。未來可以采用參考地面法,即出苗前掃描裸地獲得數字地面高程模型,以提高估算精度[19,21]。
無人機LiDAR系統相較于無人機RGB相機系統提供了更精確的株高估計,與實測值的R2達到0.88,RMSE和rRMSE分別為4.4 cm和6.6%(圖3)。無人機LiDAR相較于車載LiDAR在估算作物高度上精度略有降低[18,24,37],原因是無人機LiDAR相較于車載LiDAR具有較低的空間分辨率。為提高空間分辨率,可通過降低飛行高度,多次重復飛行和增加航線的重疊度來實現。無人機LiDAR相較于車載LiDAR的優勢是工作效率較高,不受田間地形影響,不會干擾和破壞大田作物。
基于無人機RGB相機系統獲取冠層三維結構的關鍵步驟是基于尺度不變特征算法(SIFT)將給定的圖像分解為特征點[38]。甜菜在糖分積累期時冠層封閉,當無人機RGB相機采取垂直拍攝時,無法捕獲冠層下部信息,因此只能重建甜菜冠層表面信息和側面未受到其他小區遮擋的結構信息。LiDAR是主動遙感技術,其發射的激光束具有一定的穿透性,因此能重建出整個冠層的三維結構。所以,對于作物生長后期群體冠層封閉時,無人機LiDAR相較于無人機RGB相機能重建出較完整的冠層三維結構。獲取作物完整的冠層結構對于估算與作物冠層結構相關的表型參數具有重要作用,如基于空間體素和冠層輪廓估算冠層生物量和葉面積指數等[24,31,39]。
4 結束語
以186個不同基因型甜菜為研究對象,研究了無人機分別搭載RGB相機和LiDAR系統獲取田間作物株高和重建冠層三維點云結構的差異。結果表明,兩種方法均可用于高通量、精確測定多基因型甜菜的植株高度。與實測值相比,無人機LiDAR系統相對于無人機RGB影像株高估測精度更高。兩種方法重建的冠層表面結構相似,無人機LiDAR系統相較于無人機RGB能更完整地重建冠層內部結構特征。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
