基于模糊算法的四輪線控轉向汽車操穩性研究*
2021-04-13 09:13:40屈文濤李文銳徐劍波
電子機械工程 2021年2期
屈文濤,李文銳,高 睿,楊 斌,徐劍波
(1. 西安石油大學機械工程學院,陜西 西安710065;2. 西南油氣田紀檢審計中心,四川 成都610000;3. 長慶油田分公司第三采氣廠,內蒙古 烏審旗017300)
引 言
新能源汽車的研究隨著世界能源緊張和環境問題而日益突出[1]。目前四輪轉向電動汽車因污染小、轉向靈活、易于計算機算法直接控制的特點而被廣泛研究。電動汽車轉向采用線控技術,取消了傳統汽車的機械傳動機構,采用四臺輪轂電機和四臺轉向伺服電機分別實現車輪的驅動和轉向,車輪的轉角可以精確地跟蹤和控制。在實際使用時,尤其在無人駕駛的線控轉向上應盡量避免車輛在中高速轉彎行駛時出現的側滑和甩尾現象。為了提高線控轉向對車輛轉彎穩定性的控制,國內外的研究主要表現在線控轉向下的前后輪轉角分配和控制策略上。經典的轉向方法為設置汽車前輪為主動輪,后輪為從動輪并與車身的慣性一起做擺動[2],常常出現轉向不足或轉向過度的現象,影響操作穩定性。Sano提出固定轉向比的四輪轉向系統[3],但這使得后輪轉角的隨動性變差,后輪轉向的空間被限定。文獻[4]闡述了轉角比例控制方法,后輪與前輪轉角遵循一定的比例,其中比例系數是關于車速及車輛結構參數的量,該比例可使轉向時質心側偏角接近零,操穩性(操縱穩定性)提高,但存在高速時橫擺角速度太小致使轉向不足的問題。文獻[5]提出利用后輪反饋補償的方法實現橫擺率的穩定控制,但又限制了前輪的轉向控制余地。因此,本文引入模糊推理下的前輪和后輪轉角補償的聯合控制方法來對轉彎操穩性進行控制。
1 車輛運動模型建立
車輛運動時需要知道自身在空間坐標系下的位置坐標。而坐標的尋找離不開基準定位點的選取。本文分析的是前后輪轉向的四輪轉向汽車,其底盤由可以前后自由轉向的車輪組成,圖1為其運動簡圖。該運動模型假設:
1)車輛只做平行于地面的平面運動。
2)只考慮前后轉向輪對運動軌跡的影響,將系統簡化為二自由度自行車模型[6]。
3)為了保證穩態轉彎狀態下質心側偏角為零,取前后轉向為前饋型后輪轉向策略[7]。
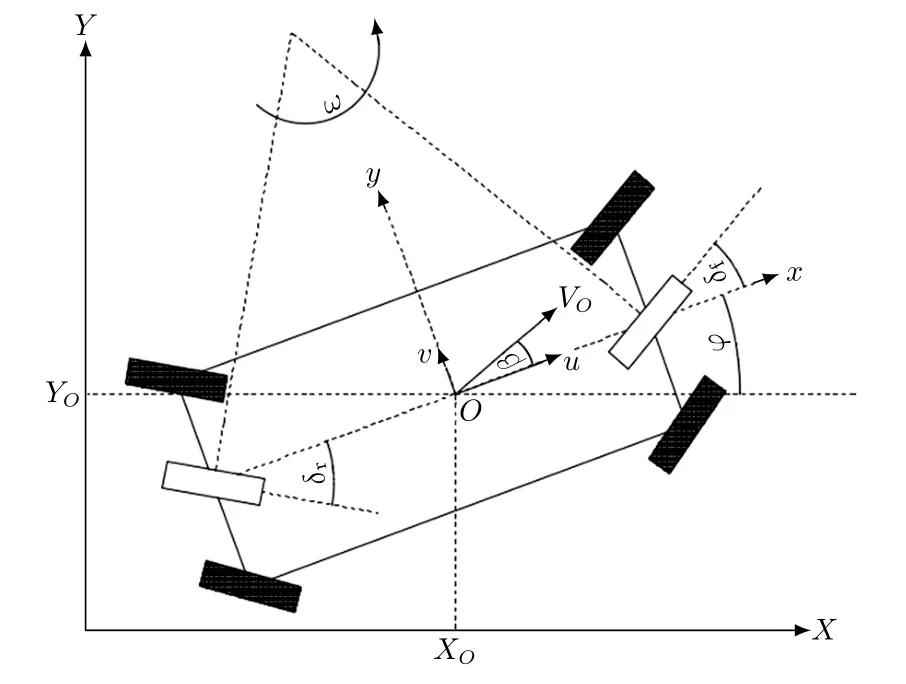
圖1 車輛自行車運動模型
這里,O為車輛的質心點,XO為質心的位置在絕對坐標系X 軸的分量,YO為質心的位置在絕對坐標系Y 軸上的投影。VO為車輛質心速度,前后輪轉角分別為δf和δr,車身角速度為ω,車輛坐標系x軸與絕對坐標系X 軸的偏角為φ。u,v分別為質心速度的縱向分量和橫向分量;β 為質心側偏角。這里規定轉角和角速度均逆時針為正和順時針為負。式(1)與式(2)為質心的點運動方程。式(3)為小車的車輛坐標系x軸與絕對坐標系X 軸的偏角公式。

式中:t0為初始運動時刻;t為當前時刻;Xt0和Yt0為質心的初始起點坐標;φ0為初始偏角。
2 二自由度動力學模型建立
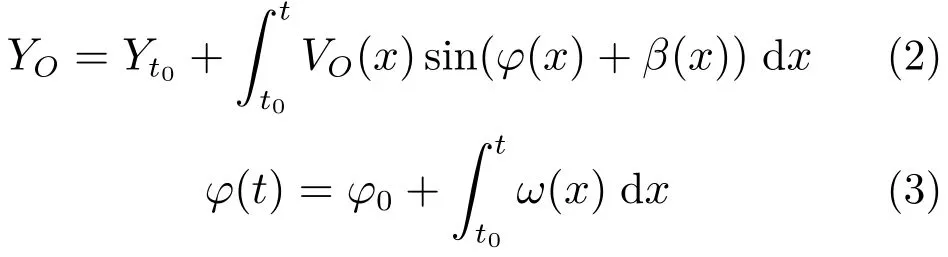
為了分析四輪線控轉向技術的汽車的路徑轉彎,在不失準確性的基礎上將其簡化為二自由度動力學模型[8],以減少控制算法的計算量,如圖2所示。圖中:αf為前輪側偏角;αr為后輪側偏角;Ff為前輪地面側向力;Fr為后輪地面側向力。
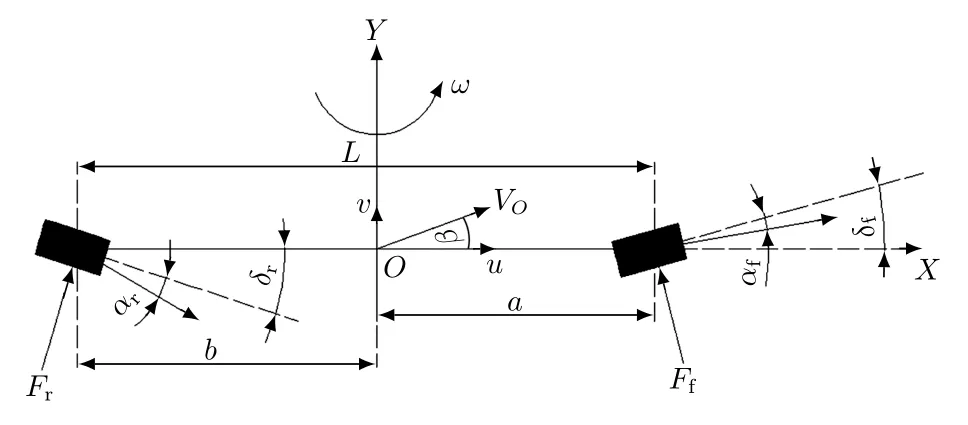
圖2 車輛轉彎二自由度模型
在研究轉向時可以進行以下必要的假設:
1)質心速度的縱向分量u保持不變,四輪轉向車輛側向加速度在0.4g范圍內。
2)中高速轉彎時的車輛不做加速行駛,忽略回正力矩對轉彎的影響,忽略橫向和縱向空氣動力學。
車體結構、輪胎特性參數設置見表1。
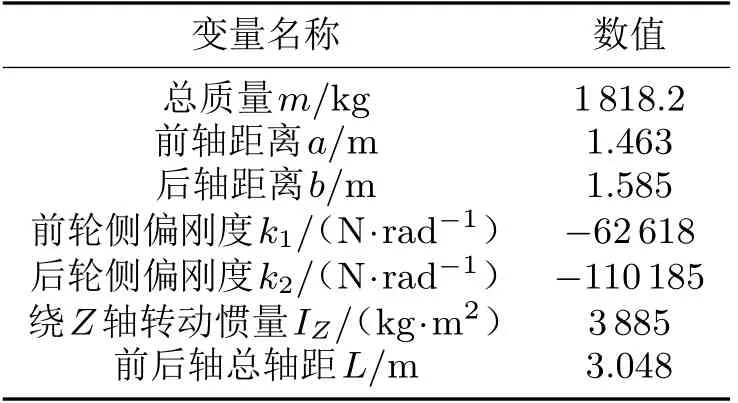
表1 車輛參數
由上述參數可以推得二自由度車輛橫擺動力學模型具體公式。設前輪轉角為δf,后輪轉角為δr,橫擺角速度為ω,得到二自由度微分方程:

這里后輪輸入通過轉向比i折算到前輪輸入,參考線性二自由度的汽車模型得到如下以前輪轉角為輸入,以車輛角速度和質心側偏角為輸出的傳遞函數方程。式(6)為角速度方程,式(7)為質心側偏角方程,式(8)—式(16)為各參數計算公式。
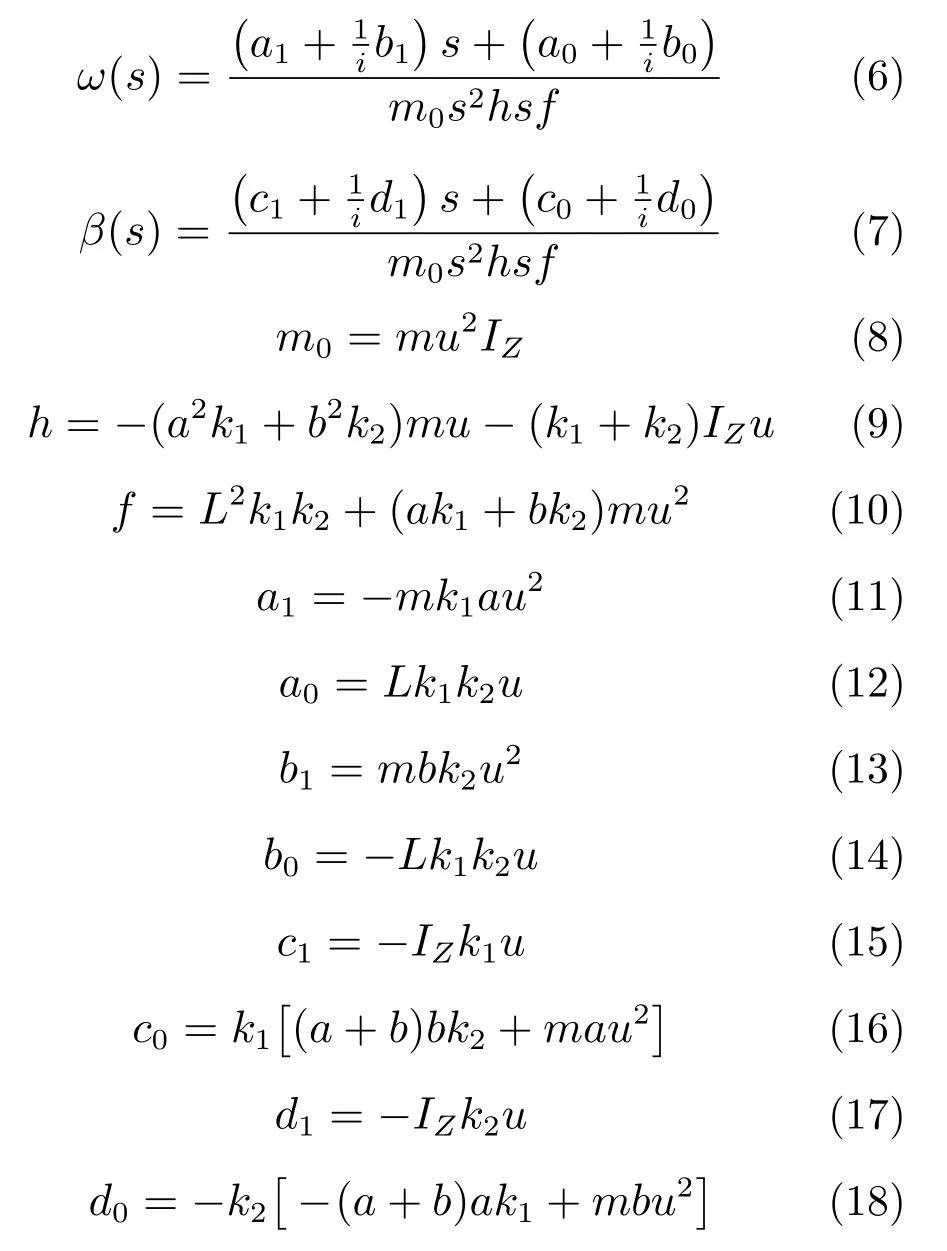
式中,s為拉普拉斯算子。
3 模糊轉向補償控制器設計

利用前輪給定轉角先估算出穩態橫擺角速度值,將此值與實際動態的橫擺角速度比較后反饋給模糊PID,利用前輪比例前饋值和模糊PID來決定后輪應補償的角度大小[9]。但是,這種策略限制了前輪轉向的余地,整個車輛只是利用后輪的補償在跟蹤目標角速度,不能完全發揮四輪轉向的優勢。因此本文對上述策略進行進一步改進,引入模糊推理下的前輪和后輪轉角補償的聯合控制方法來對轉彎操穩性進行控制。系統框圖見圖4。
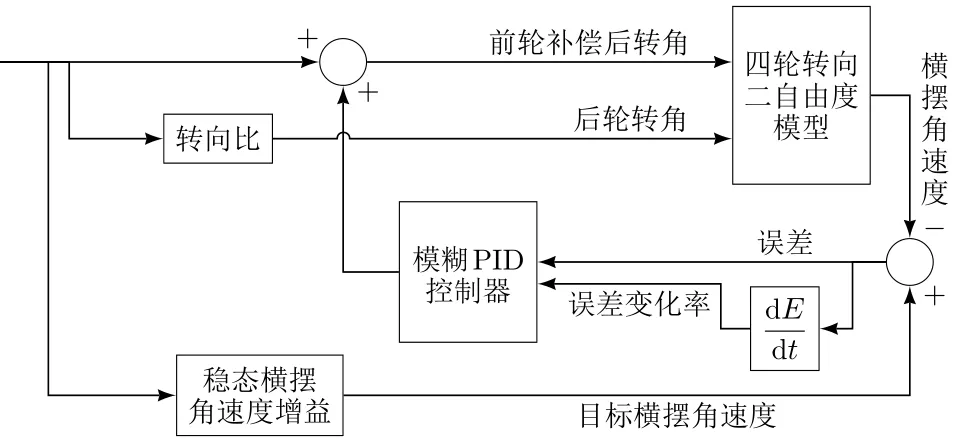
圖3 模糊PID控制
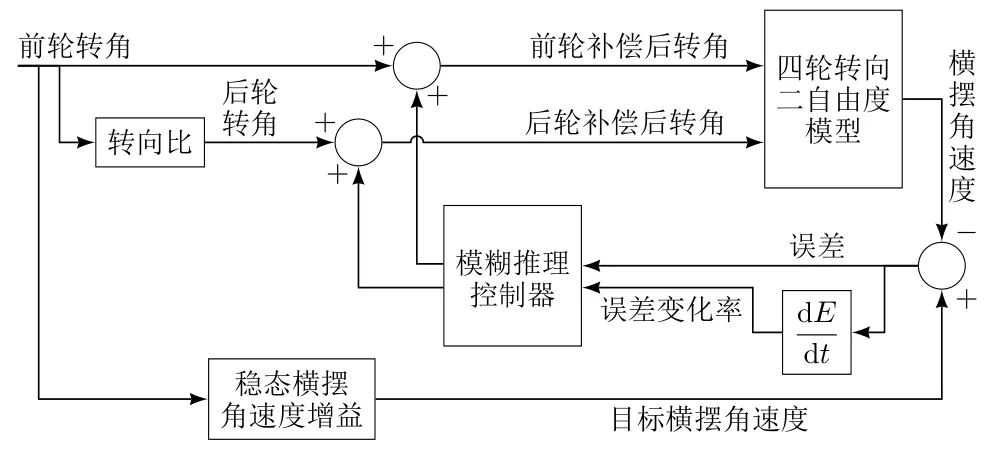
圖4 前后輪補償的模糊控制框圖
該方法利用輸入的角速度誤差及其變化率并結合自定義的模糊規則庫來計算前輪和后輪需要增減的角度,實現車輪轉角的動態補償。同時前后輪轉向比依據車體前后軸到質心的距離比確定,可以在運動學層面消除質心側偏角。設置誤差范圍為[?2,2],量化因子為0.5,誤差變化率的范圍為[?5,5],量化因子為0.2。前后輪轉角的補償值論域均為[?0.174 5,0.174 5],比例因子為1。輸入和輸出的隸屬度函數為三角函數。圖5為輸入的隸屬度函數和模糊變量取值。前后輪轉角范圍為±35°。隸屬度等級從負大至正大依次以字符串NB,NM,NS,NZ,ZO,PZ,PS,PM和PB表示。
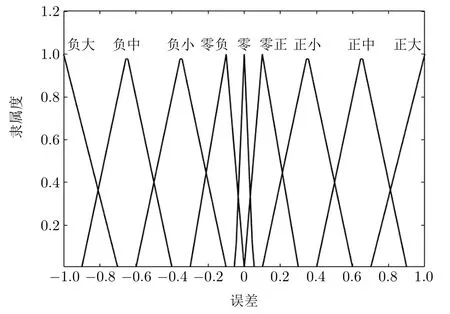
圖5 誤差隸屬度函數
圖6和圖7為輸入誤差變化率的隸屬度函數和輸出前后輪補償轉角的隸屬度函數。隸屬度等級從負大至正大依次以字符串NB,NM,NS,ZO,PS,PM和PB表示。輸出補償轉角的隸屬度等級從減大至增大依次以字符串NB,NM,NS,ZO,PS,PM和PB表示。規定輪胎轉向角逆時針轉向為正,順時針轉向為負。
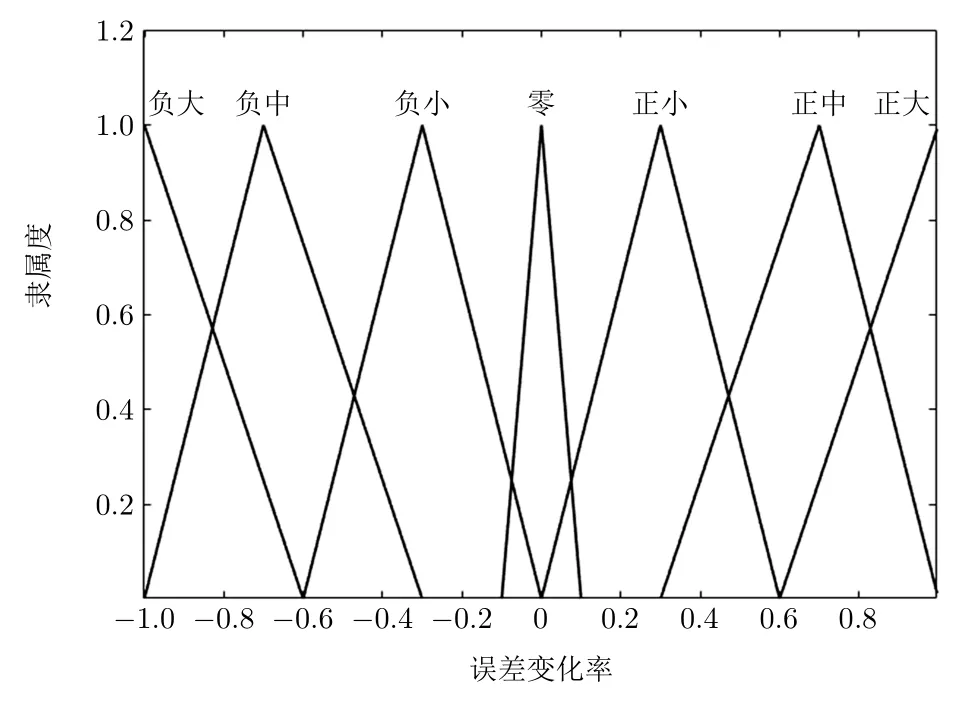
圖6 輸入誤差變化率的隸屬度函數
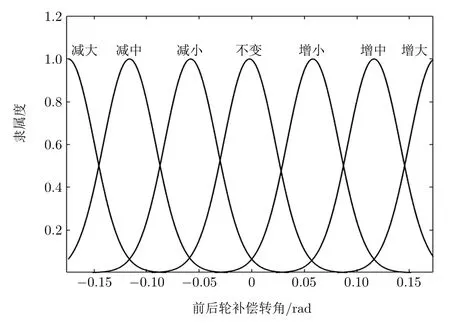
圖7 輸出補償轉角的隸屬度函數
根據If (E is A) and (EC is B) then (U is C)的原則寫出63 條模糊規則。其中E 為誤差,EC 為誤差變化率,U為輸出,這里為前后輪的補償轉向角。當角速度大于預設值且有繼續增大的趨勢時,就減小前后輪轉角,以降低橫擺率。反之增大轉向角以提高橫擺率的增速。轉角增減的幅度依據誤差和誤差變化率的大小及正負來動態調整。經過反復仿真調試,得到較為合理的模糊推理關系。圖8為前輪轉角補償模糊控制規則,圖9為后輪轉角補償模糊控制規則。圖8和圖9中第一行為誤差變化率等級,第一列為誤差等級,其余內容為對應前后輪轉角補償量的等級。
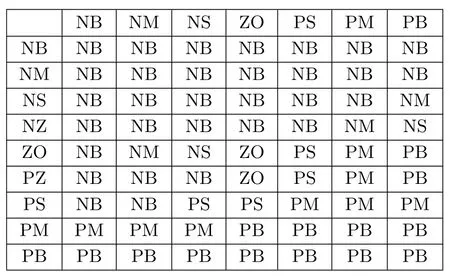
圖8 前輪轉角補償模糊控制規則
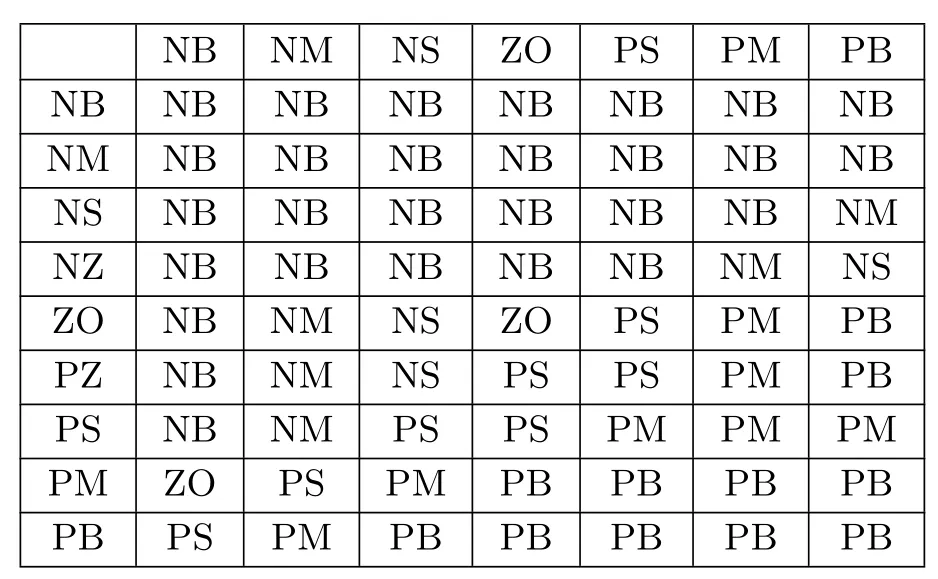
圖9 后輪轉角補償模糊控制規則
4 基于模糊控制的仿真分析
根據式(6)和式(7),結合拉普拉斯變換中的終值定理可以推出穩態橫擺角速度增益P,見式(17)。穩定因數K 見式(18)。
仿真參數設置:前輪轉角為15°,前后輪采用前饋比例控制,其轉動比為0.263 3,車輛的轉彎時速為22.35 m/s,穩態增益2.456 7。穩態橫擺角速度為0.643 2 rad/s,在得到車輛實際的橫擺角速度誤差和誤差變化率后,模糊控制器會通過模糊推理得到需要補償的前后輪轉角,再利用轉向伺服系統去跟蹤這一補償轉角的信號,最終實現對車輛橫擺角速度的控制。線控轉向伺服電機控制的主要目的是使各車輪具有更加靈活、精確的轉角控制和動態調整性。仿真選擇的電機參數設置:額定電壓48 V,電機轉矩系數0.203 N·m/A,電樞電阻0.027 ?,電感系數0.195 mH,額定轉速2 000 r/min,額定電流31.5 A,轉子慣量0.001 87 kg·m2。電機轉角控制策略為3個閉環控制的伺服轉向電機系統[10],如圖10所示。

圖10 伺服電機系統
將模糊補償后的前后輪轉角信號輸入伺服轉向系統后由電機來完成最終的轉向操作。圖11分別給出了模糊推理機控制下和前饋比例控制下的橫擺角速度響應曲線[11],圖12分別給出了模糊推理機控制下和前饋比例控制下的質心側偏角響應曲線。
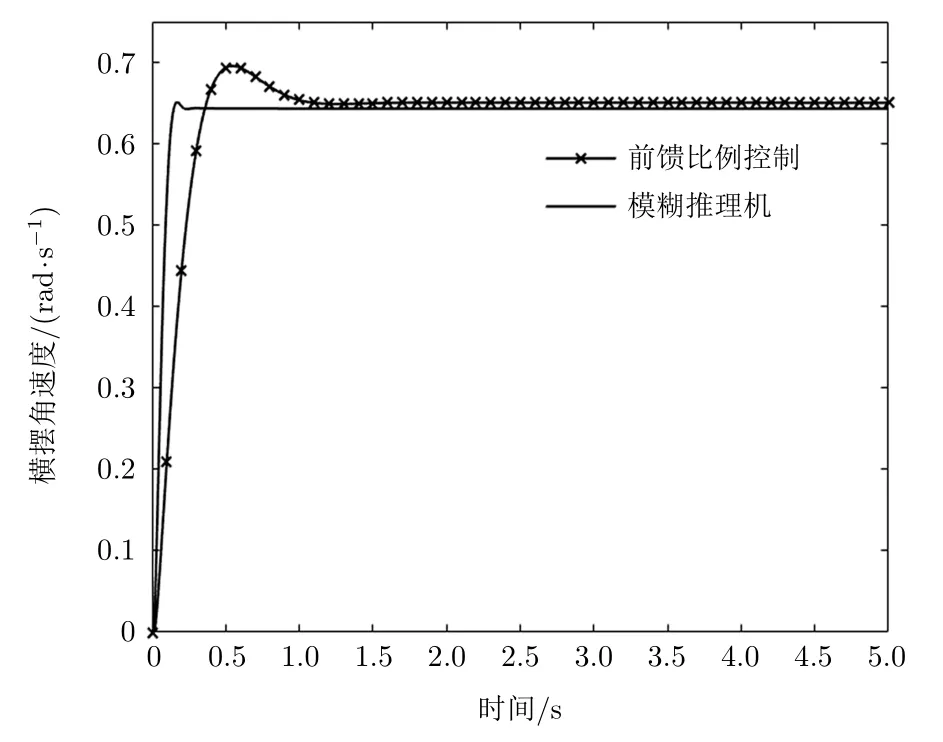
圖11 橫擺角速度響應
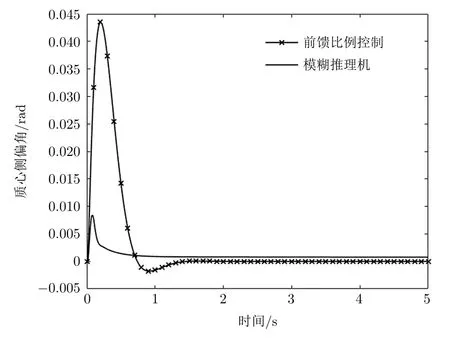
圖12 質心側偏角響應
5 結束語
通過對比前饋比例控制下的四輪轉向系統和模糊推理機控制下的四輪轉向補償系統在轉彎時的操穩性仿真結果,可得以下結論:
1)模糊推理下的前后輪轉向控制系統可以降低動力學引起的橫擺率偏差,控制前的橫擺角速度超調量為0.052 4 rad/s,反應時間0.385 9 s。控制后的超調量為0.008 1 rad/s,反應時間0.258 2 s,在提高快速性的同時能顯著降低橫擺角速度的超調量,具有較強的穩定性。
2)控制前最大質心側偏角超調量為2.492 4°,控制后超調量為0.481 3°。相比前饋比例轉向控制的四輪轉向系統,模糊推理系統能減小車輛轉彎時質心側偏角響應的穩定時間和超調量,提高了車輛轉彎的操穩性,實現了對傳統前饋比例轉向控制策略的優化。