一種基于模型的下肢助力外骨骼混合控制策略
2021-04-14 03:10:00王立志王天鑠鄭天驕張宗偉朱延河
載人航天 2021年1期
馬 舜,王立志,王天鑠,鄭天驕,張宗偉,朱延河,趙 杰
(哈爾濱工業大學機器人研究所,哈爾濱150001)
1 引言
外骨骼是能夠增強和改善人體身體機能的穿戴式設備,基于擬人化設計,與人體具有相似的運動空間,能夠跟隨人體的運動,并提供助力承擔負載,特別在一些車輛無法到達的位置,外骨骼具有獨特的優勢。
外骨骼的控制策略多種多樣,目前比較經典的控制方法有預定軌跡控制、肌電信號控制、基于模型的補償控制、靈敏度放大控制和自適應振蕩器控制。這些控制方法都有各自的優缺點。預定義軌跡控制步態穩定,能夠引導穿戴者以正確的步態進行行走,但是應用該種方法穿戴者需要適應外骨骼的步態,靈活性很難保證,往往應用于醫療康復型外骨骼;肌電信號控制方法能夠直接通過肌電信號預測穿戴者的運動意圖,使外骨骼靈敏快速地跟隨穿戴者運動,但是肌電信號測量困難,信號不夠穩定并且因人而異,使外骨骼測量系統復雜并且對人的適應性不強;基于模型的補償控制利用動力學模型計算外骨骼當前狀態下所需的關節力矩,能夠起到一定的助力作用,但是難以建立精確的模型,其在靈活性和穩定性方面都存在較大的缺陷;靈敏度放大控制最早應用于BLEEX外骨骼,無需額外引入其他的傳感器,能夠在保證助力效果的同時實現較好的靈活性,但該方法抗干擾能力較弱,尤其是當靈敏度系數較大時很容易出現不穩定的現象,所以其跟隨性能受限;自適應振蕩器廣泛應用于足式機器人的運動控制,能夠產生平滑的節律運動,具有較好的環境適應能力,該方法近年來也開始被應用于一些醫療外骨骼的控制上,例如LOPES、FHAE主要應用自適應振蕩器獲取髖關節節律運動的周期、相位等特征,然后根據獲得的運動信息計算關節所需的扭矩,但該種方法的靈活性不足,很少應用于能力增強型外骨骼上。
根據上述對比,可以看出盡管目前外骨骼的控制方法多種多樣,但是僅憑單一的方法很難同時兼顧外骨骼的靈活性、穩定性和助力效果。因此本文提出一種基于動力學模型補償、靈敏度放大和人機作用力跟隨的混合控制策略,以期保證支撐腿助力效果的同時滿足擺動腿對靈活性的要求。
2 支撐相的補償控制策略
下肢助力外骨骼機器人在支撐相中的控制策略采用簡化模型的靈敏度放大法,即不需在穿戴者自身或者人機交互力進行檢測,只是在外骨骼本體基礎上進行測量,通過控制器預測外骨骼的運動軌跡,從而使穿戴者受力很小。將外骨骼的運動角度與穿戴者對其施加的廣義力之比定義為靈敏度系數,在運動角度一定時,系數越大,穿戴者越省力。
以外骨骼單關節為例,單自由度外骨骼系統的原理示意圖如圖1,外骨骼驅動關節的動力矩由穿戴者和電機一起提供,穿戴者提供的力矩越小,則說明單自由度外骨骼系統的助力效果越好。

圖1 單自由度示意圖Fig.1 One Degree of Freedom Diagram
在外骨骼自由度處加上驅動,如圖2,電機的輸出力矩根據外骨骼自身信息得到,則電機的輸出力矩如式(1):

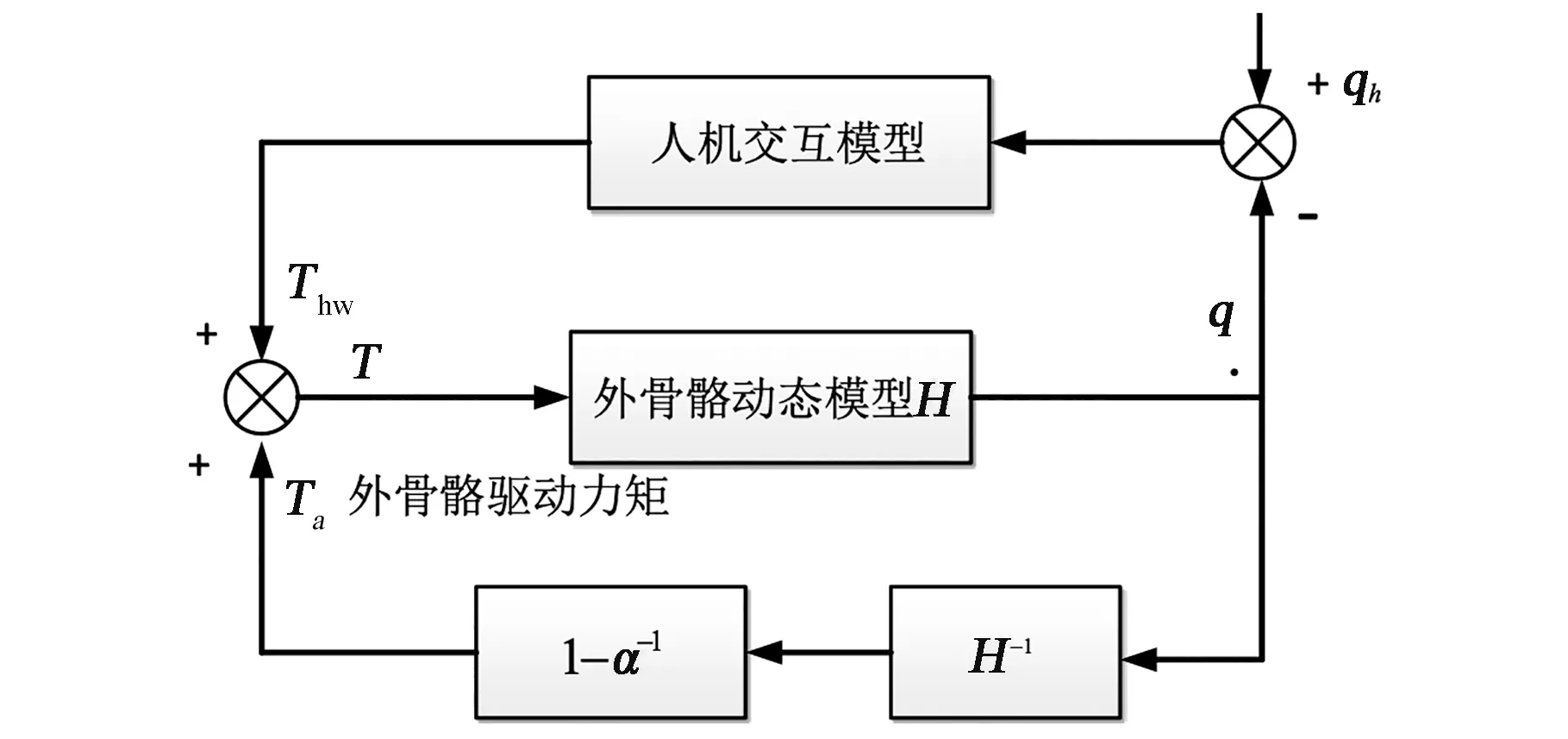
圖2 人與電機提供外骨骼驅動力矩Fig.2 Driving torque provided by human and motors
穿戴者輸出力矩如式(2):

其中,η為大于1的放大系數,H為外骨骼動力學模型。通過放大系數矩陣η的逆與動力學矩陣H的逆和角度矩陣q相乘計算各個關節的輸出力矩為一組列向量。根據有電機的控制框圖,得到靈敏度放大系數如式(3):
如果選擇放大系數η=10,則穿戴者輸出力矩變為原來的1/10,由此說明靈敏度放大法控制外骨骼可以有效降低穿戴者出力,降低能耗。

3 擺動相的力閉環跟隨控制
靈敏度放大控制屬于開環控制,若在擺動相中采用該方法,穿戴行進中,驅動關節時常伴有抖動導致系統不穩定。有外界干擾時,外骨骼會對人機交互以外的力進行響應,生成非穿戴者期望的運動軌跡,造成失穩。靈敏度放大法單純地獲取穿戴者的運動信息,通過各關節的角度傳感器,檢測到由交互力產生的機器人運動參數的改變,進而產生控制信號,使系統的驅動關節運動,進行人機跟隨。但是穿戴者在外骨骼上施加人機交互力的具體數值系統控制器無法精確獲得,導致外骨骼不能根據人機交互力的大小和外界負載的變化實時調整驅動關節的輸出力矩,而只能根據穿戴者感知判斷來調節相關參數。這種方法對系統動態模型的精確度要求非常高,而且沒有反饋,無法判斷系統的運動效果。同時,為了很好地響應穿戴者施加的人機交互力,控制器就需要很高的靈敏度放大系數,但過高的靈敏度放大系數會影響系統的魯棒性。
力閉環策略在系統中引入力傳感器間接測量推導出人機交互力,達到主動關節處運動趨勢辨識的效果,通過控制該檢測力的大小來控制外骨骼的運動,控制該作用力在很小的范圍或使作用力為0,達到零力跟隨的力閉環控制效果,原理如圖3。

圖3 零力跟隨力閉環原理圖Fig.3 Schematic diagram of closed-loop zero force follow ing
外骨骼的力閉環控制需要機器人系統的力反饋和運動反饋信息,其中的關鍵變量為目標人機接觸力和目標運動參數。人機接觸力是由穿戴者和外骨骼末端的位置誤差產生,為達到良好的人機跟隨運動效果,將目標人機接觸力控制為0。外骨骼關節的動力學模型如式(4):

式中:C為科氏力矩陣,F為摩擦系數矩陣,G為重力項。在不考慮干擾項的情況下,外骨骼主動關節驅動的輸出力矩T與穿戴者施加的關節力矩T就構成了外骨骼機器人所受的合力矩,力閉環的控制目標為期望的人機交互關節力矩為0,其中穿戴者施加的關節力矩如式(5):

式中:J為外骨骼的雅克比矩陣,f為人機交互力。根據設計主動關節驅動單元施加的廣義力、外骨骼機器人的動力學模型、穿戴者于外骨骼間的人機交互模型,可以設計主動關節的輸出力矩如式(6):

引入關于穿戴者作用于外骨骼交互力的PD控制,PD控制可以使超調變小,利于快速達到穩定,提高增益,響應速度快。通過PD控制后,主動關節的輸出力矩為如式(7):

式中:K為比例系數,K為微分系數。
雙量程檢測模塊如圖4所示,測得的力f,可以看作是由于人機軌跡誤差產生的,將人機交互模型看作式(8)~(9)所示彈簧模型:

式中:K為彈簧剛度系數,θ為外骨骼期望角度位置,即穿戴者角度位置。

圖4 雙量程檢測模塊受力應變與實物圖Fig.4 Stress strain and physical draw ing of doublerange testmodule
將上述公式帶入外骨骼動力學模型公式中,將穿戴者施加的人機作用力看作干擾項,將式(7)、(8)、(9)代入式(5)可以得到式(10):

式中,Δθ=θ-θ,為位置偏差;Δθ=θ-θ,為角速度偏差。即上述控制律能夠實現力跟隨,根據分析畫出零力跟隨的力閉環控制系統框圖如圖5。

圖5 零力跟隨力閉環框圖Fig.5 Block diagram of closed-loop zero force following
4 下肢外骨骼試驗測試
為驗證下肢助力外骨骼控制策略設計的有效性,進行相關的單關節性能測試和承重蹲起測試,從而確定是否滿足設計要求和預期效果。下肢外骨骼參考人體工程學和相關運動數據,采用擬人化的構型設計,如圖6所示。在能夠承受目標載荷的條件下,盡量減小整體質量和外形尺寸。外骨骼采用主被動結合的驅動方式,利用重力平衡原理平衡下肢自重,通過四連桿變速比的機構驅動主動關節,實現小自重、大出力的目的。
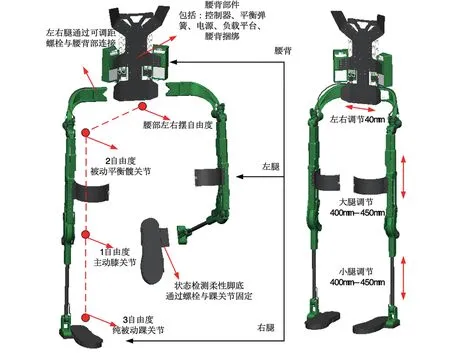
圖6 外骨骼結構圖Fig.6 Diagram of exoskeleton
外骨骼的硬件控制與傳感系統如圖7所示,其中各關節角度由角度編碼器測量,人體穿戴外骨骼后與外骨骼緊密捆綁,外骨骼關節角度信息可近似表示人體關節角度信息,腳底壓力由自制的腳底傳感器測得。
4.1 單關節跟隨性能測試
進行外骨骼跟隨穿戴者進行膝關節擺動的試驗。試驗中,人穿戴下肢助力外骨骼,進行來回擺腿,通過人體帶動機器人運動,外骨骼小腿跟隨運動。采集角度和交互力檢測模塊的拉壓力輸出,繪制曲線為圖8。

圖7 外骨骼控制與傳感系統 Fig.7 Control and sensing system of exoskeleton

圖8 力閉環人機運動跟隨實驗曲線Fig.8 Experimental curve of man-machine movement follow ing
圖中,下部曲線為交互檢測的拉壓力輸出,單位為N。可以看出,在人體進行彎曲小腿的起始動作時,檢測模塊受到由于軌跡偏差產生的壓力作用,偏離零位,從而將信號輸送給控制器,控制膝關節跟隨人體運動。當機器人跟上人體的運動時,人機軌跡偏差近似為0,此時檢測模塊的輸出又變回零位。而伸展小腿起始時,檢測模塊受到拉力,同樣跟隨后,輸出又返回零位。
4.2 蹲起過程支撐相控制效果測試
下肢助力外骨骼的主要目的是有效降低穿戴者的負重感。為了檢驗支撐相中基于模型的靈敏度放大控制效果,在人腳和外骨骼腳部加入一維壓力傳感器,測試穿戴外骨骼無承重、有承重時進行蹲起動作的足底壓力變化;以及沒有穿戴外骨骼時無承重和有承重時的足底壓力變化。
人體在沒有穿著外骨骼的情況下,進行原地蹲起和背負70 kg重物蹲起實驗,腳底力采集如圖9所示。受試者體重90 kg,雙腿對稱站立,所以腳底壓力只對右腳進行分析。由于沒有其他約束,站立時重心偏右,平衡狀態壓力50 kg,蹲起中經過先失重后超重的狀態。當背負70 kg,由于負載約束,重心近似趨于中間,蹲起中平衡腳底力為80 kg,同樣經過先失重后超重的狀態。運動過程與壓力分布合理。

圖9 無外骨骼蹲起腳底壓力采集 Fig.9 Squating foot pressure w ithout exoskeleton
穿戴外骨骼進行蹲起的動作,得到對應的壓力分布曲線。對比無承重的理論值45 kg平衡狀態,當依次背負30 kg、50 kg、70 kg的承重時,蹲起中,腳底壓力平衡位置的壓力值依次為48 kg、50 kg、53 kg。腳底壓力曲線圖如圖10所示。由此說明外骨骼在支撐過程中,能夠達到良好的助力效果,可以分擔80%的重量。由于沒有髖關節驅動,人體承重相對高些,但滿足設計指標。蹲起支撐助力效果具體分析如下:當人體沒有穿著外骨骼與穿著外骨骼進行無承重蹲起時,平衡狀態都是45 kg,說明穿戴外骨骼對人體沒有產生壓力,沒有負重感,束縛小;當承重70 kg時,對比有無外骨骼作用時的腳底壓力。平衡狀態分別為80 kg和53 kg,助力效率計算多次采集的平均值,為78%。超重過程中,峰值壓力分別為125 kg和65 kg,助力效果顯著,支撐相的控制算法有效。

圖10 穿戴外骨骼蹲起腳底壓力采集Fig.10 Squating foot pressure w ith exoskeleton
4.3 連續行走過程控制效果測試
試驗中,在人腳和外骨骼腳部之間加入一維壓力傳感器,測試穿戴下肢助力外骨骼無承重、有承重時,進行連續行走足底壓力變化,以及無外骨骼,人體正常行走時無承重、有承重的足底壓力。測試結果如圖11~12所示,無承重連續行走時,對比足底3點壓力分布情況:沒有穿著外骨骼時,腳跟壓力相對較大;穿著外骨骼時,前腳掌壓力相對較大。這是因為外骨骼腳部柔性達不到運動鞋的效果,導致腳底彎曲不明顯,壓力分布會有少許變化。而整體壓力分布規律依然呈周期性變化,說明外骨骼對人體運動影響很小。當承重70 kg時,對比有無外骨骼作用時的腳底壓力:壓力變化范圍分別為0~160 kg和0~112 kg,助力效率通過計算多次采集的平均值,達到約69%,助力效果顯著。

圖11 沒有穿戴外骨骼連續行走腳底壓力采集Fig.11 W alking foot pressure w ithout exoskeleton

圖12 穿戴外骨骼連續行走腳底壓力采集Fig.12 W alking foot pressure w ith exoskeleton
5 結論
本文將靈敏度放大控制和力閉環跟隨控制相結合構建的控制策略,完成了關節跟隨性能、負重蹲起和連續行走等試驗測試:單關節跟隨性能測試中,外骨骼可實現對膝關節擺動的零力跟隨,力閉環控制算法有效;蹲起跟蹤和連續行走控制測試中,外骨骼對人體運動影響很小,助力效果顯著,支撐相算法有效;綜上,本文提出的控制方法有效。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
光學精密工程(2016年6期)2016-11-07 09:07:19