月面靈巧探測網絡系統設計探討
2021-04-14 03:10:00曹素芝李昌浩王厚鵬
載人航天 2021年1期
曹素芝,李昌浩,2,王厚鵬,2,孫 雪,2
(1.中國科學院空間應用工程與技術中心,北京100094;2.中國科學院大學,北京100049)
1 引言
月球是離地球最近的唯一天然衛(wèi)星,月球探測不僅可以了解月球的成因、演化等信息,同時還為月球中各種稀缺資源的開發(fā)提供信息支撐。然而月球高真空、強輻射、晝夜溫差大等特性使得月球探測具有極大的技術挑戰(zhàn)。目前許多國家和機構都將月球探測作為深空探測的第一步,月球探測活動陸續(xù)開展。探測方式從飛越、環(huán)繞、硬著陸逐漸發(fā)展到軟著陸、月面巡視及航天員登月考察等。在這些方式中,對月球的遠距離無接觸探測無法獲取實際樣本參數,觀測誤差較大。著陸月球探測的巡游式、站點式方案還存在覆蓋面積有限、實施復雜、部署周期長等不足。因此需要探索新的低成本、可快速實施的探測手段,具備可靈活擴展、覆蓋面廣、長時間續(xù)航的探測能力,使其能夠完成對探測盲區(qū)的補漏覆蓋以及對目標區(qū)域的快速應急探測。
無線傳感網通過分布在檢測區(qū)域內的傳感器節(jié)點獲取最直接、有效、真實的信息,并通過無線自組織的網絡傳遞信息。無線傳感網在國防和軍事、自然環(huán)境感知、工業(yè)生產等領域廣泛應用,其實時監(jiān)測、感知、采集和傳遞環(huán)境信息的能力已經得到充分驗證。將無線傳感網絡應用到月面探測中,能夠實現對巡游式、站點式探測的有益補充。
本文結合無線傳感網絡設計理念,提出一種高效的月面分布式探測系統架構。針對月表環(huán)境特性,設計單個物理探測節(jié)點,并基于各節(jié)點構建分布式與集中式結合的月面靈巧無線網絡系統。選取月球南半球面積約1000 km的典型區(qū)域進行仿真,并在地面環(huán)境搭建仿真驗證系統,對分布式通信組網進行初步功能與性能測試。
2 系統架構
2.1 系統設計
月球探測網絡系統的設計需考慮月面環(huán)境、檢測對象和處理單元等特性。從節(jié)點模型和月面布局著手,依據數據處理流程構建探測網絡系統框架,總體互聯關系如圖1所示。分散在月面的各傳感網絡組成感知節(jié)點層,實現智能感知和交互功能,包括信息采集與通信等。網絡接入層主要實現信息接入、傳輸和通信,關注實現月面探測網絡大范圍的覆蓋與信息共享。地月雙向通信層也是數據的處理層,完成探測信息的及時分析與科學研究,總體框架如圖2所示。圍繞數據的采集、傳輸和處理環(huán)節(jié)分為物理層、網絡層和應用層。
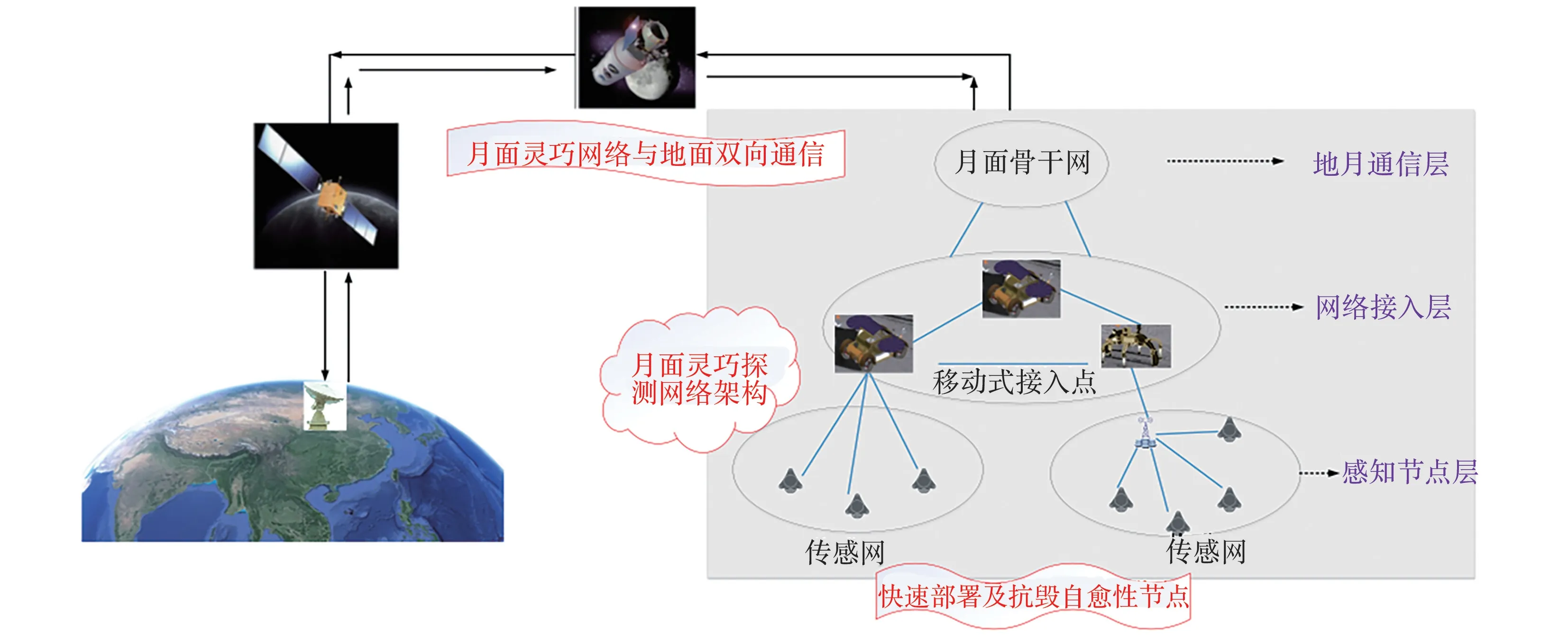
圖1 總體互聯架構圖Fig.1 Diagram of the overall interconnection architecture
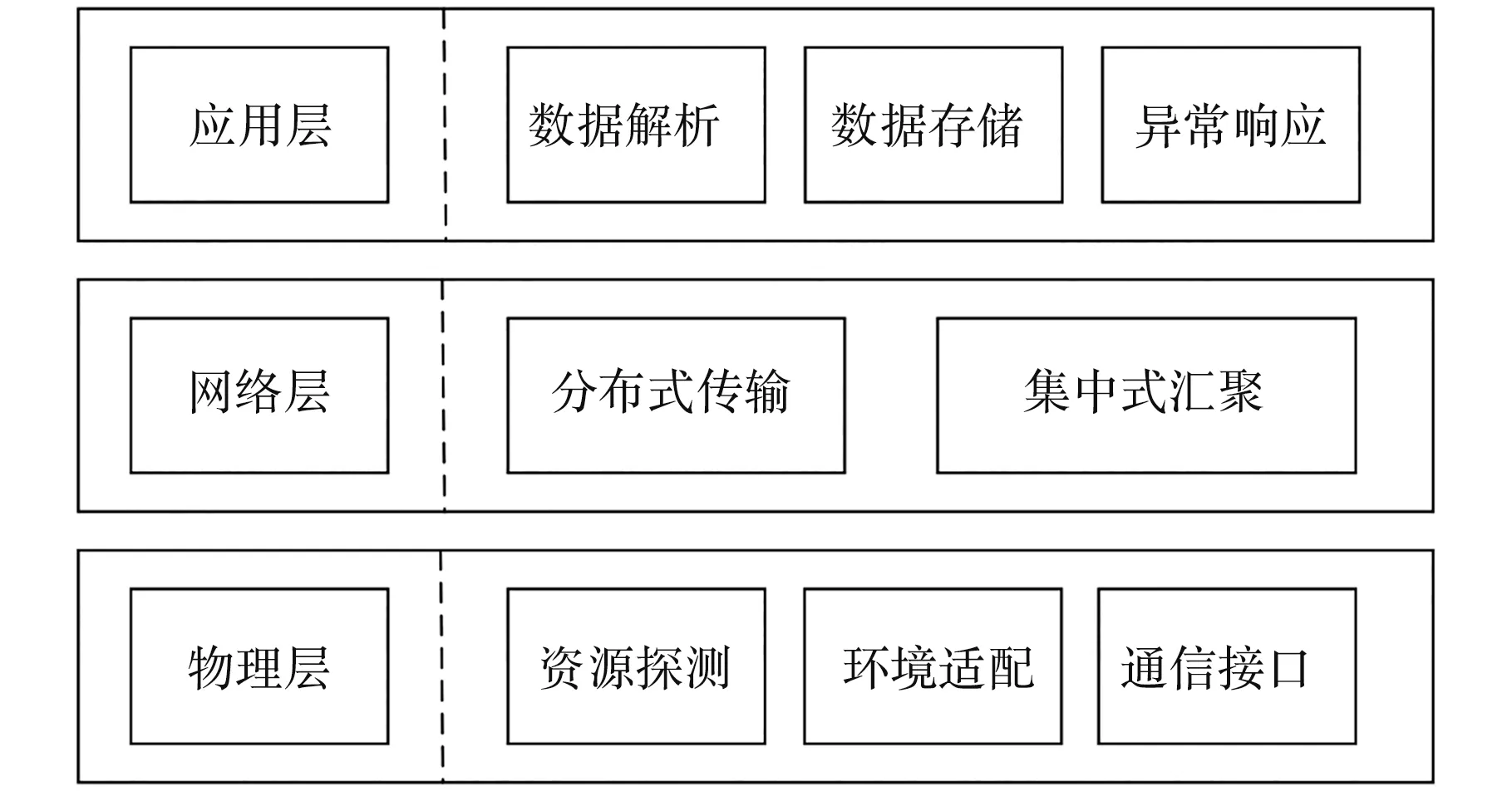
圖2 月面靈巧探測系統邏輯架構圖Fig.2 Logic structure diagram of the lunar dexterous detection system
2.2 物理層
受月表特殊環(huán)境的影響,尤其是晝夜高溫差對探測網絡節(jié)點的正常工作提出了嚴峻考驗。物理節(jié)點承擔整個探測系統數據采集,是系統的數據來源。
通常,傳統探測器節(jié)點包括:①處理器模塊,能夠接收數據并實現數據融合;②無線通信模塊,完成傳感器節(jié)點之間的無線通信;③傳感器模塊,實現對外界環(huán)境的感知,即數據采集的功能;④能源模塊,由蓄電池為傳感器節(jié)點各部分提供能源。本文對月球表面靈巧探測器節(jié)點進行模塊化設計,模塊組成及模塊之間的連接如圖3所示。
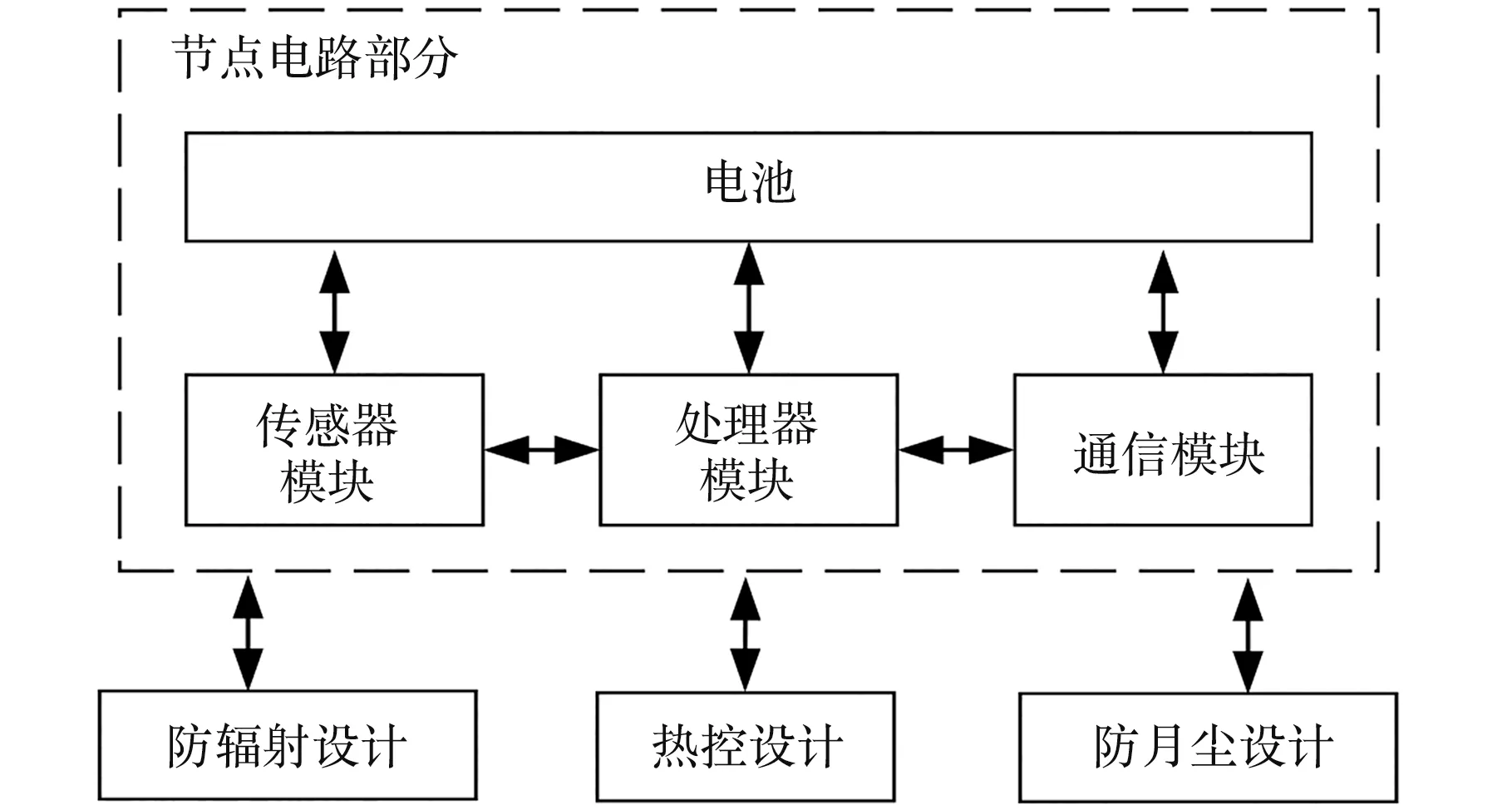
圖3 探測器節(jié)點設計圖Fig.3 Diagram of the detector node design
2.2.1 傳感器模塊
傳感器模塊可根據需求進行定制,比如溫度傳感器、輻射傳感器、月壤成分分析傳感器、水資源探測傳感器、礦物探測傳感器等,分別檢測月表溫度、月表紫外線強度,分析月壤成分以及探測月壤中的水冰成分等。
2.2.2 處理器模塊
處理器模塊的設計要求是低功耗、抗輻射、耐高低溫。計劃使用Cobham公司基于ARM Cortex-M0+的宇航級單片機芯片UT32M0R500。該芯片提供多種電源控制模式,功能模塊可編程的使能和去使能,時鐘門控、升降頻等措施,為實現處理器模塊的低功耗和全狀態(tài)能耗優(yōu)化提供基礎和可能。
2.2.3 通信模塊
無線傳輸方式主要包括藍牙、WiFi、ZigBee、NB-IoT和LoRa。其中LoRa技術傳輸速率低,能耗、設計難度及制造成本均低于其他技術,適用于低速率、低功耗的工作場合,因此基于Semtech公司的新一代低功耗LoRa芯片SX1262(長距),設計了通信模塊,實現分布式組網通信。
2.2.4 供電模塊
地面?zhèn)鞲衅鞴?jié)點一般采用一次性電池供電,電量不足后可以通過更換電池實現持續(xù)工作。對于月面?zhèn)鞲衅鞴?jié)點需要設計一種新型的無人干預的供能手段,使無線傳感器在長期無人監(jiān)測的環(huán)境下仍能夠正常工作。無線靈巧傳感節(jié)點要實現長期免干預工作方式,重要的是利用應用環(huán)境條件進行續(xù)能和適當存儲。目前,在月球和地面許多情形下,靜態(tài)節(jié)點最方便獲取且取之不盡的能源是太陽能;同時根據傳感節(jié)點周期性工作特點,以及考慮到通常儲能元件可充電次數(工作壽命)問題,結合有機超級電容和鋰離子電池或石墨烯鋰電池為傳感節(jié)點供電是一個可行的解決方案。該方案能夠在減少對鋰電池充電次數的同時,提供對鋰電池過度放電的保護措施,以延長鋰電池的工作壽命,達到利用太陽能提供長時間、無人干預的供電效果。
2.2.5 防輻射設計
傳感器運行環(huán)境為月面環(huán)境,可以通過增加外壁厚度設計,以滿足抗輻照設計要求。防輻射模塊使用電磁屏蔽體,能夠使內部器件免受外界空間電磁場的影響;對于紫外輻射,一般的解決方法是選擇紫外吸收率很低的涂層。針對模塊的輻照性能,有效的加固措施是采用Al制外殼。Al的厚度為3 mm時,10年的輻照總劑量約為910 rad。
2.2.6 熱控設計
針對月球表面的超高溫與超低溫環(huán)境,通過多層封裝的方式將內部溫度環(huán)境與劇烈變化的外部熱環(huán)境隔離,確保靈巧探測器工作在規(guī)定的溫度范圍內。封裝方式如圖4所示。
圖4 靈巧探測器隔熱設計Fig.4 Thermal insulation design of the dexterous detector
多層隔熱材料由高反射率的反射屏和低熱導率的間隔層交替疊合而成,在保溫同時可提供隔熱效果。隔熱組件利用屏面的反射,對輻射熱形成較高的熱阻,在真空下具有極好的隔熱性能,其當量熱導率理論上可低至5~10 W/(m·K)的量級。氣凝膠層主要通過氣凝膠加固保溫隔熱性能,氣凝膠具有優(yōu)異的防/隔熱性能與耐環(huán)境穩(wěn)定性,可承受1000℃以上的高溫。相變材料層利用熔化和凝固過程吸收和釋放潛熱的原理進行溫度維持,適用于月面溫度周期性變化的環(huán)境。
2.2.7 防月塵設計
月塵具有粘附性、研磨性和滲透性等特點,可能會掩埋傳感器節(jié)點,從而對其太陽能發(fā)電和通信等功能產生影響。因此傳感器節(jié)點防月塵設計可有效降低月塵危害,如節(jié)點被掩埋造成通信不良,熱控涂層被遮蔽造成散熱功能異常等。
防月塵設計主要考慮以下2個方面:①應避免傳感器節(jié)點被月塵掩埋,因此節(jié)點對月塵的壓強應達到相應的標準,同時節(jié)點的質量應盡量小,且底部的面積應盡量大。為了滿足上述要求,需將節(jié)點封裝在一個半球形密封結構里。半球形具有重心低、底面積大的優(yōu)點,能有效降低壓強,使節(jié)點不會陷落在月塵里;而且由于月面重力場較弱,節(jié)點也不會翻倒。另外,密封設計隔離了節(jié)點與月塵的接觸。②對探測器使用不粘材料進行封裝。借鑒荷葉疏水原理,在其表面上增加具有小于月塵特征尺寸紋路的涂層,形成納米級的針床,能夠有效降低月塵顆粒與功能表面間的接觸面積,減弱月塵對傳感器表面的附著力,抑制月塵的附著。此外,還可以設置導電鍍膜,即在功能表面鍍一層超薄導電膜(如氧化銦錫膜)并接地,釋放其表面月塵顆粒的電荷,從而減小月塵的靜電附著力。
2.3 網絡層
網絡層實現數據傳輸的功能。建立適合于月表特殊環(huán)境下的無線網絡架構是研究載人月表靈巧探測網絡技術的前提和基礎。首先對月表真空環(huán)境及探測需求進行分析,通過分析地面成熟且具有可擴展、可移動等優(yōu)點的無線組網技術,提出面向月表特殊環(huán)境的高可靠月表靈巧探測網絡(Reliable Lunar Smart-Sensor Network,R-LSN)架構,該網絡架構創(chuàng)新性地提出集中式和分布式相結合的組網方式。
高可靠月表靈巧傳感網絡如圖5所示,基于對月表特殊環(huán)境的分析,將其分為2類:適合直接部署移動式接入點(Mobile-AP,M-AP)及傳感節(jié)點的類平原地區(qū)和不適合直接部署移動式接入點及傳感節(jié)點的月表(如月坑)。結合這2類月表環(huán)境特點,重點探討如何進行地形自適應地快速部署月表靈巧探測網絡。
圖5 高可靠月表靈巧傳感網絡示意圖Fig.5 Diagram of the highly reliable dexterous sensor network on lunar surface
1)針對類平原地區(qū),首先建立基于月表飛行器(月球車)的M-AP移動便捷部署方案。傳感器節(jié)點根據其所在的范圍,選擇接入具體的M-AP。M-AP節(jié)點根據其所在位置選擇直接接入月表骨干網絡還是采用多跳方式通過其他M-AP接入月表骨干網絡(如某個M-AP節(jié)點與月表骨干網絡距離較遠或者有月山/月坑等阻隔時)。
2)針對不適合直接部署M-AP的月坑/月山地區(qū),月表靈巧探測網絡通過自組織網絡進行月坑/月山的探測,自組織網絡內節(jié)點通過路由算法計算出匯聚節(jié)點(如邊緣節(jié)點),坑內/山上的探測信息通過匯聚節(jié)點傳輸到月坑外的M-AP,MAP再接入到月表骨干網絡。對于實在無法覆蓋的巨大月坑,則采用坑周邊多個M-AP的聯合部署方式。
3)若月表骨干網支持,M-AP也可以直接與月球基地實現通信,兼容不同的體制與模式,以適應月表基礎設施不同條件下的通信需求。
在可靠性方面,本文采用智能冗余備份的架構來提高月表靈巧探測網絡的可靠性,冗余備份基站、冗余備份傳感器節(jié)點保持睡眠狀態(tài),在網絡能夠正常工作時,不啟動備份節(jié)點;當節(jié)點發(fā)生故障時,啟動備份節(jié)點,從而實現網絡可靠性。網絡正常工作的節(jié)點具備可以接入備份移動式接入點的能力,同時備份移動式接入點也具備與正常工作基站及月表骨干網絡通信的能力。
在低功耗方面,月表靈巧探測網絡節(jié)點采用異步通信方式,當其要發(fā)送的數據準備完成后可立即通信,可以降低同步網絡需要經常喚醒的功耗。
2.4 應用層
應用層是監(jiān)控系統頂層處理邏輯的實現,是響應數據處理邏輯的最終單元。系統面向不同的物理監(jiān)測量所采集的信息格式與處理流程各不相同,為保證各數據加工的獨立性與安全性,在月球計算資源受限的環(huán)境下,應用層采用Docker容器技術封裝各數據處理邏輯。Docker容器是一種輕量級內核虛擬化技術,可通過namespace和cgroups實現進程與資源的隔離。系統基于容器技術動態(tài)調節(jié)監(jiān)測系統的處理邏輯規(guī)模,可有效提高天基資源利用率。
在應用層中,處理主要分為解析存儲與異常響應兩類。對月表溫度、磁場、光照等監(jiān)測對象,應用層解析其通過網絡層傳輸回的數據,整理后統一記錄于后端數據庫,為載人探測與探月選址等提供分析數據。選用MySQL數據庫對系統后臺數據進行存儲,因為MySQL的長連接方式能夠有效保證數據的穩(wěn)定傳輸。對于月震,太陽風等敏感檢測量,應用層實時響應其動態(tài)變化,對采集的數據流作閾值分析,當數據大于臨界值時,發(fā)出報警信息,并實時界面顯示。
3 仿真實驗與演示系統
為測試探測系統的覆蓋性和可用性,搭建了演示系統對網絡進行仿真,并測試其功能。
3.1 網絡實驗
3.1.1 數據來源
選用探月工程-數據發(fā)布與信息服務系統提供的嫦娥二號執(zhí)行月球探測任務期間的科學探測數據作為仿真地理環(huán)境建模的數據來源。
利用ENVI軟件對嫦娥二號探測數據進行讀取分析得到月面各點的海拔情況。經過對月球DEM南半球圖的大致分析,選取了面積為23 350 m×58 300 m,同時具有2個大型月坑與類平原地形的一塊典型區(qū)域作為構建月面分布式探測網絡的仿真場景。將M-AP節(jié)點和傳感器節(jié)點的通信半徑、部署間隔及漂移半徑設定為固定值進行實驗,如表1所示。
表1 實驗參數Table 1 Experiment parameters /km
本文得到三維地形下的傳感器、M-AP與簇頭節(jié)點的三維分布與二維分布圖,如圖6、圖7所示,其中黑色點為隨機拋灑的傳感器節(jié)點,紅色點為隨機拋灑的M-AP節(jié)點,橘色點為中繼傳感器節(jié)點。
圖6 月坑與類平原區(qū)域的傳感器與M-AP的三維圖Fig.6 Three-dimensional diagram of the sensors and M-AP in moon craters and p lain-like areas
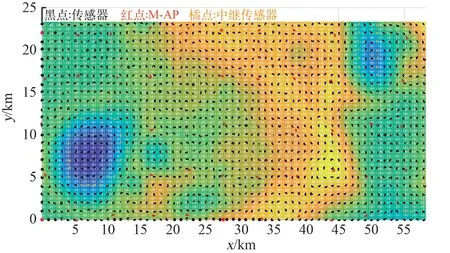
圖7 月坑與類平原區(qū)域的傳感器與M-AP的二維圖Fig.7 Two-dimensional diagram of the sensors and M-AP in m oon craters and p lain-like areas
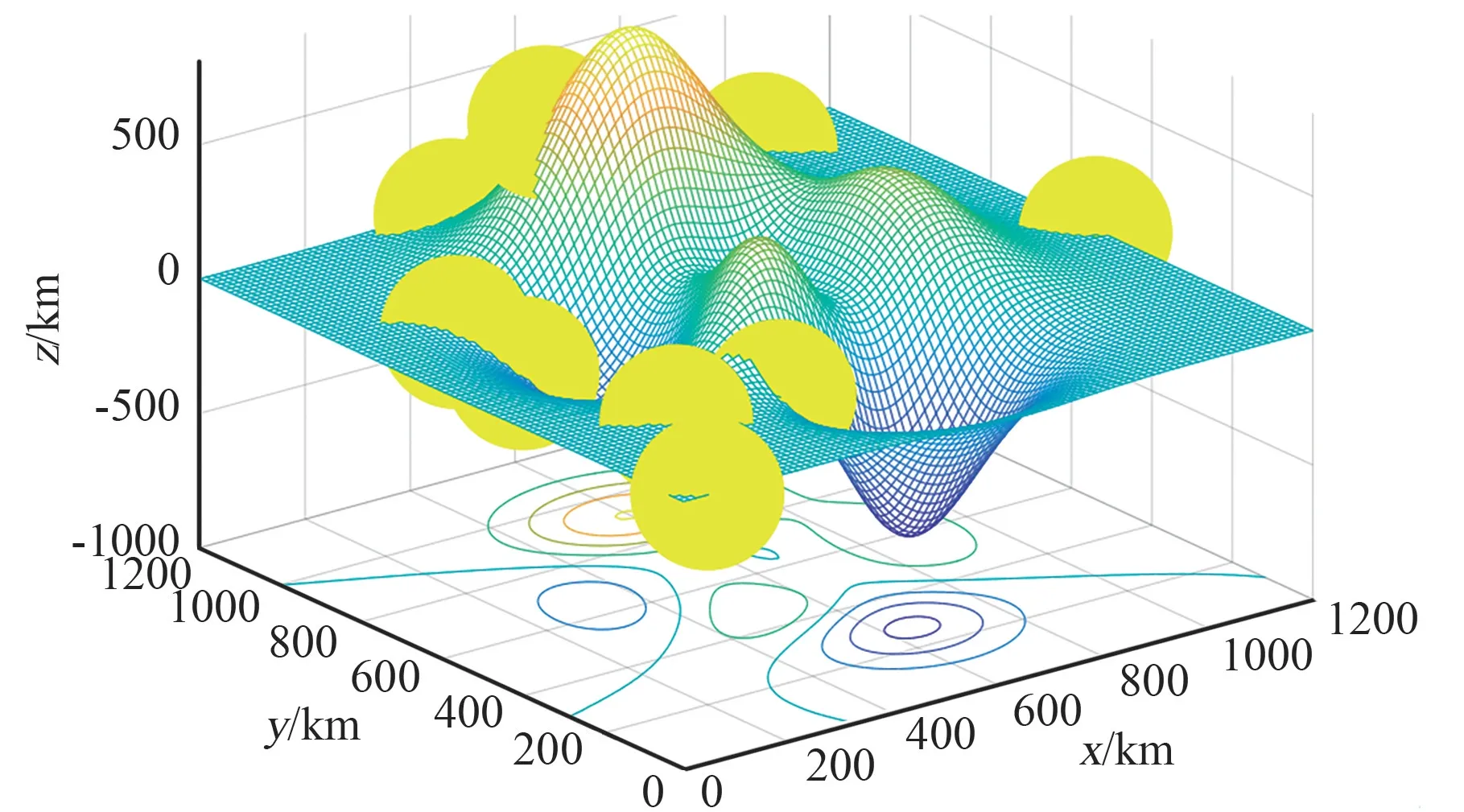
圖8 月面?zhèn)鞲衅鞯挠行Чぷ骶嚯xFig.8 Effective working distance of lunar surface sensor
3.1.2 傳感器節(jié)點覆蓋率
基于Matlab得到月面?zhèn)鞲衅饔行Чぷ骶嚯x的3D立體模型,如圖8所示。根據每個節(jié)點周邊傳感器覆蓋個數,可得傳感器節(jié)點覆蓋率。
依據傳感器覆蓋范圍,對M-AP節(jié)點個數與覆蓋傳感器比例的關系進行仿真,M-AP節(jié)點個數與覆蓋率關系曲線如圖9所示。仿真結果表明,當M-AP節(jié)點數超過46時,覆蓋率能夠達到100%,總趨勢呈大致線性上升。
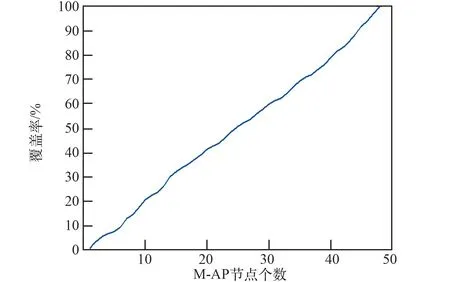
圖9 M-AP節(jié)點個數與覆蓋率關系曲線Fig.9 Relationship curve between the num ber of MAP nodes and coverage
3.2 演示系統
地面演示驗證系統架構如圖10所示。探測節(jié)點集成后如圖11所示,形成以樹莓派為處理單元,集成數據采集與傳輸功能的探測器節(jié)點。探測器節(jié)點用于接收傳感器監(jiān)測的數據,探測器節(jié)點收集數據后通過LoRa局域網傳輸至簇頭節(jié)點,簇頭節(jié)點匯聚各探測器節(jié)點傳感器數據,并將這些數據通過LoRa送至網關節(jié)點。網關節(jié)點通過Socket將數據發(fā)送至PC端。PC將數據存儲到數據庫,通過演示節(jié)點展示給用戶。
為了驗證當前地面演示驗證系統是否能正常工作,測試并獲取了空氣溫濕度、土壤濕度、光照強度、振動頻率等數據,測試記錄如表2所示。其中空氣溫濕度,土壤濕度測量均正確。期間通過改變傳感器明暗程度收到了相應光照強度測量值。此外,實驗中使用振動傳感器,通過連續(xù)一段時間的檢測給出此時振動概率。時間戳即為記錄數據獲取時間。這里基于實驗室的環(huán)境,先將每臺機器時間同步,檢測當前地面演示驗證系統從采集數據到PC端成功接收數據的時延、成功次數,并在不同的距離下進行了測試,5 min內的數據統計如表3所示。結果表明該演示系統在一定距離內的傳輸性能波動不大,較為穩(wěn)定。
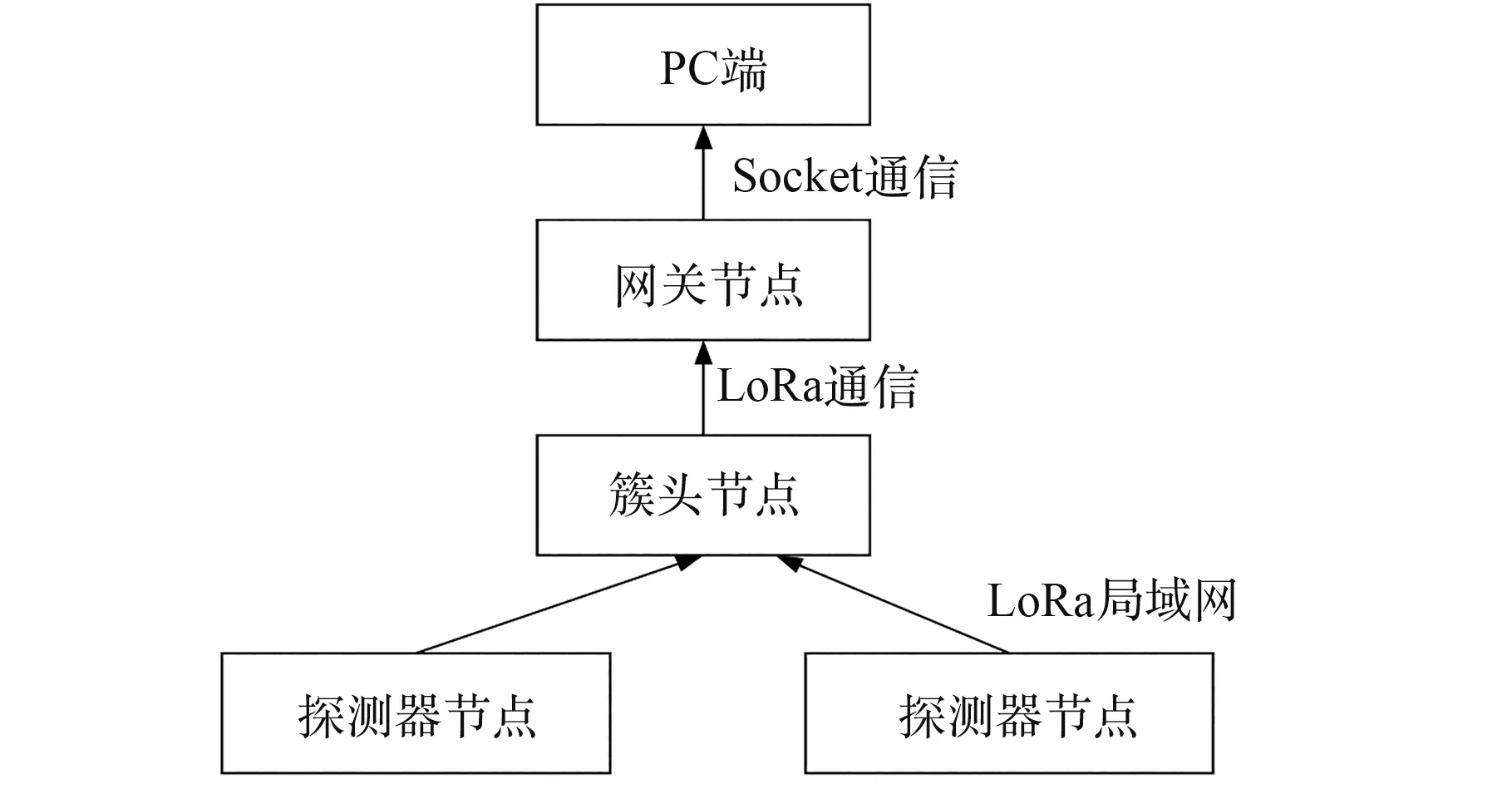
圖10 地面演示驗證系統Fig.10 Ground demonstration and verification system

圖11 傳感器、LoRa通信及匯聚處理實物圖Fig.11 Photos of sensor,LoRa communication and convergence processing
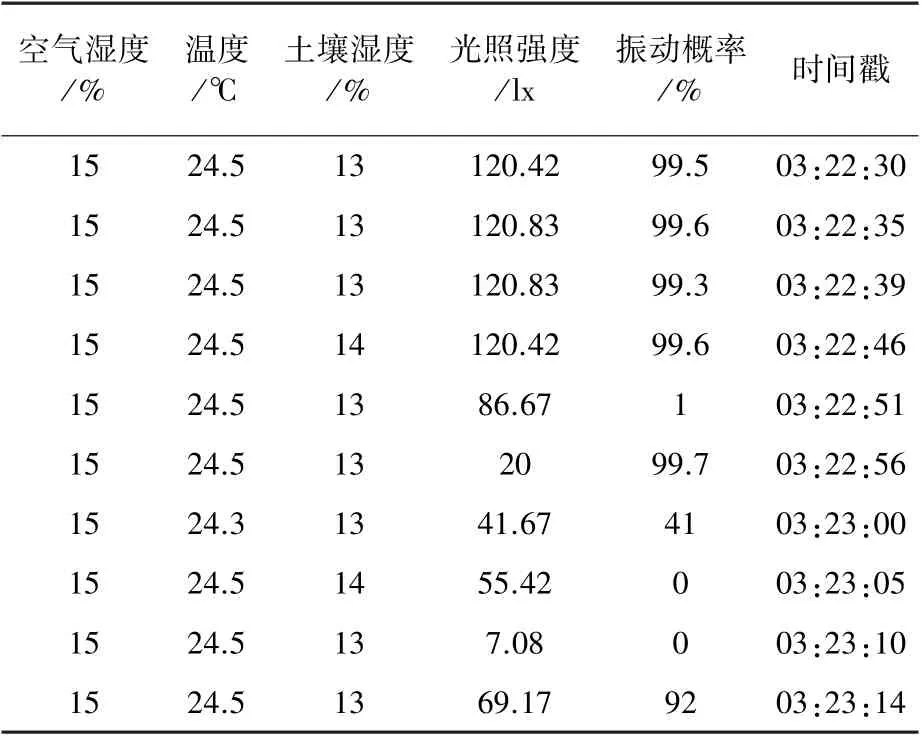
表2 環(huán)境數據測試記錄表Table 2 Test recording table of environm ental data

表3 傳輸時延統計結果Table 3 Statistics of transm ission delay
4 結論
針對月表高真空、強輻射、晝夜溫差大等特性,本文設計了月面分布式組網及激光回傳網絡架構,提出了一種基于無線傳感網絡的物理、網絡、應用3層結構組成的月面靈巧探測系統。該系統以低功耗探測器為節(jié)點,構建月面探測網絡系統,通過Docker容器技術封裝上層信息處理流程,實現數據實時處理。仿真實驗結果表明:該探測系統可有效覆蓋月面探測區(qū)域,并正確響應數據檢測流程。
月面分布式組網探測是站點式、巡游式探測的有效補充,可以大大提高探測效率與覆蓋率,本文提出的基于無線傳感網絡的組網方案,經仿真驗證具有良好的效果,為月面探測提供了可借鑒的技術路線。面向未來的月面應用,還需不斷關注高可靠、低功耗的探測節(jié)點設計以及彈性靈活抗毀的月面分布式組網技術研究,為后續(xù)工程實施奠定基礎。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17