基于機(jī)器視覺的運(yùn)動目標(biāo)跟蹤方法研究
2021-04-20 02:36:30李志朋
電子技術(shù)與軟件工程 2021年1期
李志朋
(天津光電高斯通信工程技術(shù)股份有限公司 天津市 300392)
科學(xué)合理的應(yīng)用運(yùn)動目標(biāo)的跟蹤方法具有十分重要的意義,并且具有較大的應(yīng)用價值。用機(jī)器來替代人的大腦和眼睛,可以為人們的生活和工作帶來諸多便利,在當(dāng)前的交通運(yùn)輸、單位安保、醫(yī)學(xué)及軍事等方面得到廣泛應(yīng)用。運(yùn)動目標(biāo)跟蹤將圖像中運(yùn)動目標(biāo)的大小、運(yùn)動目標(biāo)的具體位置和運(yùn)動目標(biāo)的速度等數(shù)據(jù)信息分析出來,如果在對運(yùn)動目標(biāo)進(jìn)行跟蹤的過程中受到各種外界因素以及內(nèi)在因素的影響,就會導(dǎo)致跟蹤工作的難度加大,并且還會對跟蹤結(jié)果的準(zhǔn)確性和可靠性造成嚴(yán)重影響[1]。隨著社會的發(fā)展和進(jìn)步,計(jì)算機(jī)技術(shù)也在不斷發(fā)展,大大降低了視頻圖像采集和儲存的成本,并且讓處理效率得到提升,視頻跟蹤技術(shù)符合智能化、信息化和自動化的時代發(fā)展潮流。
1 目標(biāo)跟蹤評判標(biāo)準(zhǔn)和難點(diǎn)
1.1 目標(biāo)跟蹤判斷依據(jù)
運(yùn)動目標(biāo)跟蹤算法的評價依據(jù)主要有以下三點(diǎn):
(1)準(zhǔn)確性。其準(zhǔn)確性能夠通過運(yùn)動目標(biāo)具體方位以及運(yùn)動跟蹤結(jié)果二者之間的對比,來對它們的相近程度進(jìn)行比較。準(zhǔn)確性能夠在全部的跟蹤算法評判依據(jù)中得到有效應(yīng)用,假如目標(biāo)跟蹤的結(jié)果沒有合理應(yīng)用準(zhǔn)確性,就會導(dǎo)致前期進(jìn)行的工作不具備實(shí)際意義。
(2)實(shí)時性。運(yùn)動目標(biāo)跟蹤算法執(zhí)行過程所需時間可以通過實(shí)時性進(jìn)行衡量,如果具有非常快的算法運(yùn)行速度,而且也用不著太多的計(jì)算資源,就可以將該算法的實(shí)時性很好的表現(xiàn)出來。在跟蹤運(yùn)動目標(biāo)時,計(jì)算量會隨著視頻幀數(shù)發(fā)生變化,幀數(shù)越多計(jì)算量也就越大,序列圖像要想實(shí)現(xiàn)快速處理,就必須要求跟蹤算法具有實(shí)時性。
(3)魯棒性。魯棒性指的是一種抗干擾能力,跟蹤算法在運(yùn)行時對受到外部環(huán)境的影響,如果運(yùn)動目標(biāo)背景中存在噪聲或是其他干擾因素,算法執(zhí)行效果都會受到影響。對于運(yùn)動目標(biāo)跟蹤來說,算法魯棒可以確保其具有穩(wěn)定性和持續(xù)性。
1.2 目標(biāo)跟蹤算法工作中存在的困難
通常來說,運(yùn)動目標(biāo)基本上存在于較為復(fù)雜的環(huán)境當(dāng)中,所以在開展運(yùn)動目標(biāo)跟蹤工作之前,需要進(jìn)行圖像預(yù)處理,對目標(biāo)區(qū)域開展檢測工作,并獲取目標(biāo)位置,接著科學(xué)合理的應(yīng)用運(yùn)動算法進(jìn)行運(yùn)動目標(biāo)跟蹤工作。目標(biāo)跟蹤算法的難點(diǎn)可以從以下幾個方面體現(xiàn)出來:
(1)光照的變化。運(yùn)動目標(biāo)的表觀現(xiàn)象會受到光照顏色、方向以及強(qiáng)度變化的影響。如果運(yùn)動目標(biāo)光照變化比較強(qiáng)烈時,會對顏色特征穩(wěn)定性造成影響,導(dǎo)致跟蹤算法的準(zhǔn)確性得不到保證。
(2)背景顏色影響。如果背景顏色和運(yùn)動目標(biāo)顏色比較接近,就會導(dǎo)致目標(biāo)分離工作難度加大,難以讓運(yùn)動目標(biāo)完整的與背景相脫離,并且會影響到目標(biāo)的跟蹤過程[2]。
(3)目標(biāo)大小改變。如果目標(biāo)的大小出現(xiàn)一定程度的變化,那么對目標(biāo)的跟蹤工作就無法固定窗口跟蹤算法來實(shí)現(xiàn),讓目標(biāo)跟蹤喪失可靠性。
2 運(yùn)動目標(biāo)檢測方法
2.1 光流法
對二維圖像中運(yùn)動物體的像素進(jìn)行分析,通過分析結(jié)果可以實(shí)現(xiàn)三維運(yùn)動物體運(yùn)動信息的有效獲取。光流和運(yùn)動場比較相似,通過對時間域內(nèi)的物體像素進(jìn)行分析研究,掌握運(yùn)動物體對應(yīng)位置像素變化,從而獲得物體的運(yùn)動速度及方向。光流法的優(yōu)點(diǎn)是不需要提前了解視頻場景中的目標(biāo)大小、光照情況和動態(tài)背景等信息,就可以準(zhǔn)確檢測到運(yùn)動中的目標(biāo)。光流法在背景運(yùn)動場景中比較適用,如果情況比較理想,能夠精確計(jì)算出運(yùn)動目標(biāo)的速度。但使用光流場計(jì)算公式所提出的假設(shè)條件在具體的視頻場景中很難得到滿足,因此,當(dāng)條件不理想的情況下,會讓光流場正確求解的難度加大。除此之外,在目標(biāo)檢測過程中使用光流法還會消耗大量時間,不具備較好的實(shí)時性。
2.2 幀差法
幀差法具有十分簡單的應(yīng)用原理,在具體的應(yīng)用過程中也不會有較高難度,所以得到了較為普遍的應(yīng)用。相鄰幀之間的差異性和相關(guān)性是幀差法的重要基礎(chǔ),視頻中背景的灰度值和像素點(diǎn)位置不會改變,目標(biāo)一旦發(fā)生運(yùn)動,就會讓相鄰的灰度值發(fā)生改變。通過差分的使用,能夠快速找到出現(xiàn)變化的區(qū)域。運(yùn)動目標(biāo)如果是利用幀差法得到,那么就不具備一定的完整性,在之后的工作中還需要再次處理,為運(yùn)動目標(biāo)的有效提取提供保障[3]。幀差法的優(yōu)點(diǎn)主要有以下幾個方面:
(1)具有比較簡單的原理,容易實(shí)現(xiàn)對運(yùn)動目標(biāo)的獲取。
(2)具有較快的運(yùn)行速度,可以有效加快圖像的處理速度。
(3)具有一定的場景適應(yīng)性,受到光照或環(huán)境影響較小。
2.3 背景差法
背景差法的應(yīng)用原理跟上文介紹的幀差法相似程度較高,對比兩種不同的圖像,背景圖像的像素不會出現(xiàn)太大程度的改變,而運(yùn)動目標(biāo)區(qū)域像素會發(fā)在很大程度上發(fā)生改變,通過可續(xù)分析像素差異性特征,可以成功檢測到運(yùn)動目標(biāo)的具體位置(如圖1)。在具體的實(shí)踐工作過程中,背景圖像直接獲取的難度非常大,所以通常會利用背景建模法來獲取圖像。背景差法算法比較簡單,能夠得到比較完整的運(yùn)動物體區(qū)域。但在實(shí)際環(huán)境中會受到多種外界因素的影響,無法滿足實(shí)時性要求,并且會有出現(xiàn)誤差的可能,所以需要對背景進(jìn)行更新,確保獲取運(yùn)動物體的準(zhǔn)確性。專家學(xué)者也在不斷對此方法進(jìn)行創(chuàng)新,并取得了不錯的成果,提升了背景算法的豐富程度。
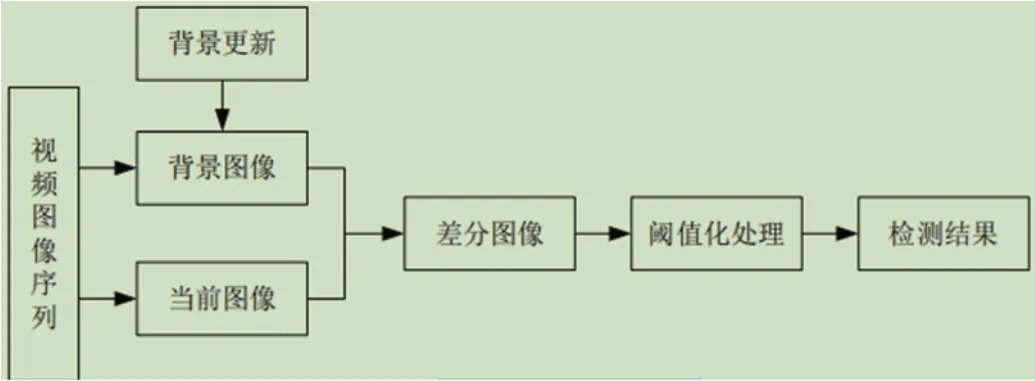
圖1:背景差法流程圖
3 運(yùn)動目標(biāo)跟蹤方法分析
我們可以以運(yùn)動目標(biāo)檢測為依據(jù),科學(xué)合理的進(jìn)行運(yùn)動目標(biāo)的跟蹤。在對運(yùn)動目標(biāo)具體位置進(jìn)行檢測的過程中,可以在視頻圖像序列中把運(yùn)動目標(biāo)分離出來。在檢測目標(biāo)運(yùn)動的時候,做好運(yùn)動目標(biāo)的跟蹤工作,確定好運(yùn)動目標(biāo)在時間軸上面的具體運(yùn)動軌跡,獲取跟運(yùn)動目標(biāo)相近的其他目標(biāo)物體,并做好兩者之間的連接。首先,應(yīng)將運(yùn)動目標(biāo)模板確定下來,通過一定的度量準(zhǔn)則,根據(jù)相應(yīng)規(guī)定標(biāo)準(zhǔn),尋找具有最高匹配程度的目標(biāo)位置,然后進(jìn)行匹配工作,成功完成目標(biāo)物體位置追蹤。隨著時代的快速發(fā)展,運(yùn)動目標(biāo)跟蹤的使用層面也在逐步提升,并出現(xiàn)了大量的跟蹤算法。目前,比較常用的跟蹤算法有粒子濾波、卡爾曼濾波等,可以將目標(biāo)跟蹤算法分為以下幾種:
3.1 將區(qū)域匹配作為依據(jù)的跟蹤算法
這種算法主要是匹配圖像的不同區(qū)域,并成功獲取運(yùn)動目標(biāo)模板,以目標(biāo)特征為依據(jù),找出相鄰圖像之間的位置點(diǎn),并最大程度確保具有相同的特征,從而實(shí)現(xiàn)確定運(yùn)動目標(biāo)位置的目的。區(qū)域面積、目標(biāo)顏色、目標(biāo)紋理等都是目標(biāo)區(qū)域的典型特征,圖像相關(guān)匹配法是比較常用的區(qū)域匹配方法。將區(qū)域匹配算法科學(xué)合理的在運(yùn)動目標(biāo)跟蹤工作中使用,可以有效提升目標(biāo)跟蹤工作的效率,如果目標(biāo)出現(xiàn)不同的變化,比如變形、旋轉(zhuǎn)等,或是受到光線變化的影響,就容易導(dǎo)致區(qū)域匹配出現(xiàn)錯誤[4]。在比較復(fù)雜的場景中應(yīng)用,受到的外界因素影響較大,就會對匹配效果造成嚴(yán)重影響,甚至?xí)屗惴ㄊА;趨^(qū)域匹配的跟蹤算法實(shí)時性比較差,這一缺點(diǎn)導(dǎo)致了此方法沒有得到廣泛普及。
3.2 以主動輪廓為基礎(chǔ)的跟蹤算法
此方法與區(qū)域匹配跟蹤算法具有比較相似的原理,它們都是通過兩部分來完成,即目標(biāo)匹配和確定匹配模板。但二者之間也存在不同,這種方法不是以圖像區(qū)域作為匹配模板,而是以目標(biāo)的大致輪廓作為基礎(chǔ)。首先確定好圖像的大致輪廓,接著在圖像中將具有較大相似度的匹配輪廓尋找出來。另外,輪廓匹配跟蹤算法的運(yùn)動量比區(qū)域匹配跟蹤算法小很多,而且對運(yùn)動目標(biāo)的跟蹤準(zhǔn)確性也比較高。Michael Kass 等人提出的主動輪廓模型是此方法的典型代表,將一組可以變化形態(tài)的曲線在目標(biāo)區(qū)域內(nèi)設(shè)定好,通過控制點(diǎn)慢慢對目標(biāo)輪廓和自身形狀進(jìn)行調(diào)整,確保二者達(dá)到一致[5]。通過函數(shù)的求解工作,獲得函數(shù)最小值,這種曲線被定義為Snake 曲線。
3.3 以特征匹配為基礎(chǔ)的跟蹤算法
上文中提到的兩種匹配方法是將物體當(dāng)作整體來進(jìn)行跟蹤,而基于特征匹配的跟蹤則是選擇具有特性代表的運(yùn)動物體,針對物體上面的特征點(diǎn)進(jìn)行跟蹤,具有較好的持續(xù)性。代表性的物體特征點(diǎn)需要具備下面幾個特點(diǎn):不跟背景相混淆、具備一定的獨(dú)特性、不會受到光照變化影響以及不隨物體形狀發(fā)生變化。此方法的優(yōu)點(diǎn)是:能夠?qū)ξ矬w的形態(tài)變化進(jìn)行很好的適應(yīng),針對遮擋住的部分也有很好的效果,假如沒有全部遮擋住物體的特征,就能夠完成物體跟蹤工作,還可以對光照變化和環(huán)境變化進(jìn)行很好的適應(yīng)。但此方法也存在一定的難點(diǎn):是否可以很好的適應(yīng)各種外界因素的影響,將物體自身的特點(diǎn)呈現(xiàn)出來。所以,在使用此方法時需要根據(jù)實(shí)際環(huán)境來選擇運(yùn)動目標(biāo)的特點(diǎn),比如物體的顏色、紋理、邊緣等。
3.4 以模型為基礎(chǔ)的跟蹤算法
這種跟蹤算法與其他運(yùn)動目標(biāo)跟蹤算法相比較來說,具有較大差異,它能夠快速獲取運(yùn)動目標(biāo)的三維信息,促進(jìn)運(yùn)動目標(biāo)信息多樣性的提升。在目標(biāo)跟蹤時應(yīng)用此算法,需要在線下運(yùn)動目標(biāo)的三維模型構(gòu)建好,并以此模型自身具備的特征為基礎(chǔ),準(zhǔn)確確定運(yùn)動目標(biāo)各方面的內(nèi)容,如果3D 目標(biāo)種類不同那么3D 模型也會存在差別。三維目標(biāo)模型建模比較復(fù)雜,但可以對運(yùn)動目標(biāo)進(jìn)行比較全面的描述,能夠有效克服目標(biāo)遮擋障礙,并且對復(fù)雜場景具有比較好的適應(yīng)性,在今后的運(yùn)動目標(biāo)跟蹤工作中會得到廣泛應(yīng)用。
3.5 將運(yùn)動目標(biāo)特點(diǎn)作為依據(jù)的跟蹤算法
這種運(yùn)動目標(biāo)的跟蹤算法可以對目標(biāo)信息進(jìn)行有效利用,并創(chuàng)建運(yùn)動目標(biāo)信息模型,以現(xiàn)有的運(yùn)動規(guī)律數(shù)據(jù)為基礎(chǔ),準(zhǔn)確判斷運(yùn)動目標(biāo)在下一幀圖像中的位置。這種跟蹤算法具有獨(dú)特的優(yōu)勢,可以有效降低需要搜索的區(qū)域面積大小,而且可以促進(jìn)搜索工作效率的提升,有效減少目標(biāo)跟蹤的工作量,同時又節(jié)省了大量的工作時間。
4 結(jié)語
隨著社會的不斷發(fā)展和進(jìn)步,機(jī)器視覺受到人們的重視程度在不斷增加,各種機(jī)構(gòu)在此方面的研究力度也得到加強(qiáng),許多的研究成果也已經(jīng)應(yīng)用到我們的生活中,在娛樂、生產(chǎn)、軍事等方面應(yīng)用較為廣泛。目標(biāo)跟蹤的結(jié)果會受到跟蹤算法的影響,由于運(yùn)動目標(biāo)具有環(huán)境多變性、物體形狀多變性等特點(diǎn),讓運(yùn)動目標(biāo)跟蹤過程難度加大,所以應(yīng)選擇合適的跟蹤算法。目前我們對目標(biāo)跟蹤方面的研究仍處于初級階段,還有更多的問題等著我們?nèi)ヌ剿鳎詰?yīng)不斷加強(qiáng)跟蹤算法研究力度,合理利用先進(jìn)科學(xué)技術(shù),期待獲得更多的優(yōu)秀成果。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學(xué)院學(xué)報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
