太陽能無人機(jī)用多繞組永磁同步電機(jī)控制系統(tǒng)研究
2021-04-20 09:30:48王春杰陶志偉陳鵬尹金良
電子設(shè)計(jì)工程 2021年6期
關(guān)鍵詞:控制策略
王春杰,陶志偉,陳鵬,尹金良
(天津理工大學(xué)電氣電子工程學(xué)院,天津 300384)
太陽能無人機(jī)因其戰(zhàn)略價(jià)值和發(fā)展前景而備受關(guān)注。但其依靠太陽能光伏板發(fā)電能量單一且功率密度低,能源控制系統(tǒng)不足以解決復(fù)雜多變的情況且受邊界條件影響,限制了飛機(jī)日夜飛行的能力[1-2]。現(xiàn)有能源控制系統(tǒng)線路損耗大、載荷重、導(dǎo)線及變流器等設(shè)備數(shù)量多,整體系統(tǒng)效率低。且多數(shù)仍采用集中式直流母線能源方案,但直流母線固定不變,各部分吸收的能量工況不一致,整體發(fā)電效率降低,造成能量損耗,無法實(shí)現(xiàn)能量供需平衡[3-6]。相關(guān)學(xué)者設(shè)計(jì)了多條可變直流母線的新型能源分布式管理系統(tǒng),以能量平衡及能流高效為優(yōu)化目標(biāo),將能源系統(tǒng)控制模型拆分為多個(gè)子系統(tǒng),并施以分布式協(xié)同控制法使各模塊間協(xié)同運(yùn)作[7],維持功率平衡,提高能源利用效率。但目前的多繞組永磁同步電機(jī)只考慮容錯(cuò)特點(diǎn),并未將多繞組進(jìn)行模塊化分析,不能實(shí)現(xiàn)新型能源分布式系統(tǒng)的模塊間協(xié)同控制。
基于此,文中提出一種新型多繞組永磁同步電機(jī)及控制系統(tǒng),以功率平衡為約束前提[7],兼顧能源系統(tǒng)的能量平衡分配指令,每一套繞組為一個(gè)電機(jī)模塊,各模塊間獨(dú)立且協(xié)調(diào),以適應(yīng)新型能源分布式管理系統(tǒng)。
1 多繞組永磁同步電機(jī)的模型分析
1.1 多繞組永磁同步電機(jī)的結(jié)構(gòu)
多繞組永磁同步電機(jī)的3 套定子繞組各自呈無相角差排列,也無電氣連接的Y 型連接。為保證電機(jī)軸減小磨損,此三相繞組采用串聯(lián)連接。電機(jī)線匝及出線端按股數(shù)均分為3 部分,每一部分均可用作單獨(dú)的電機(jī)模塊。
3 套繞組并行繞制,對(duì)其施以三相電壓并運(yùn)用控制策略共同工作時(shí),其輸出扭矩是3 套繞組輸出扭矩相疊加的矢量和,每一套繞組能按能源系統(tǒng)指令實(shí)現(xiàn)輸出功率。與同等功率的傳統(tǒng)永磁電機(jī)相比,新型多繞組永磁同步電機(jī)將每套定子繞組的匝數(shù)減少為1/3,而定子繞組總匝數(shù)保持不變;三組獨(dú)立蓄電池供電組以改善電池成組效應(yīng),提高安全性。此外,多繞組永磁同步電機(jī)構(gòu)成的系統(tǒng)可有效抑制定子電流中的高次諧波,改善電流波形,以遏制電機(jī)轉(zhuǎn)矩脈動(dòng),從而提高系統(tǒng)的動(dòng)態(tài)特性[8]。多繞組永磁同步電機(jī)帶來以上優(yōu)勢(shì)的同時(shí),所伴隨的控制器設(shè)計(jì)難度加大。因此,如何使不同電機(jī)模塊下多個(gè)繞組電流間相位保持同步成為其主要技術(shù)問題。
1.2 多繞組永磁同步電機(jī)控制系統(tǒng)
為匹配新型能源分布式管理系統(tǒng),設(shè)計(jì)并搭建多繞組永磁同步電機(jī)控制系統(tǒng),如圖1 所示。根據(jù)分布式能源系統(tǒng)要求,每個(gè)電機(jī)模塊均須獨(dú)立控制且相互協(xié)調(diào)。能源控制系統(tǒng)通過CAN 總線將轉(zhuǎn)速指令及各直流母線消耗功率配比下發(fā)給電機(jī)控制器,電機(jī)控制器通過控制策略控制各個(gè)矢量控制器的功率并按同比例分配給電機(jī)各模塊。另外,各個(gè)矢量控制器要保證磁動(dòng)勢(shì)方向一致,以確保電機(jī)各模塊旋轉(zhuǎn)磁場(chǎng)同步及同矢量位;各電機(jī)模塊可獨(dú)立經(jīng)電機(jī)控制器連接可變直流母線,確保各電機(jī)模塊最大化獲取能量,適應(yīng)新型能源分布式系統(tǒng),提高整個(gè)系統(tǒng)效率。
1.3 多繞組永磁同步電機(jī)控制方案
為解決3套繞組電流同相位這一技術(shù)問題,文中采取如下方案:繞組采用SVPWM控制產(chǎn)生的電流iA1通過電流檢測(cè)作為設(shè)定,剩余兩套繞組采用PR跟蹤滯環(huán)用來檢測(cè)參考繞組的電流,并加電流檢測(cè)環(huán)節(jié)作為反饋,保證多繞組永磁電機(jī)3套繞組在同頻率同相位的定子電流驅(qū)動(dòng)下,輸出功率近似于傳統(tǒng)永磁同步電機(jī)的3倍,其控制策略框圖如圖2 所示。多繞組永磁同步電機(jī)自身冗余的設(shè)計(jì),可以實(shí)現(xiàn)3組電源獨(dú)立供電,從而使電流幅值iA1、iA2、iA3可成同比例產(chǎn)生PWM 信號(hào)驅(qū)動(dòng)電機(jī)繞組。
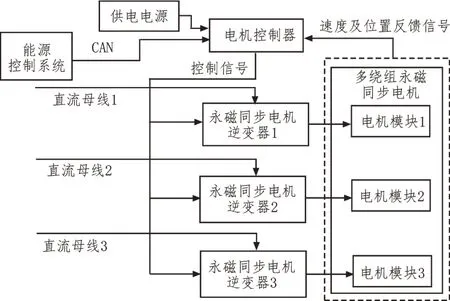
圖1 多繞組永磁同步電機(jī)控制系統(tǒng)圖
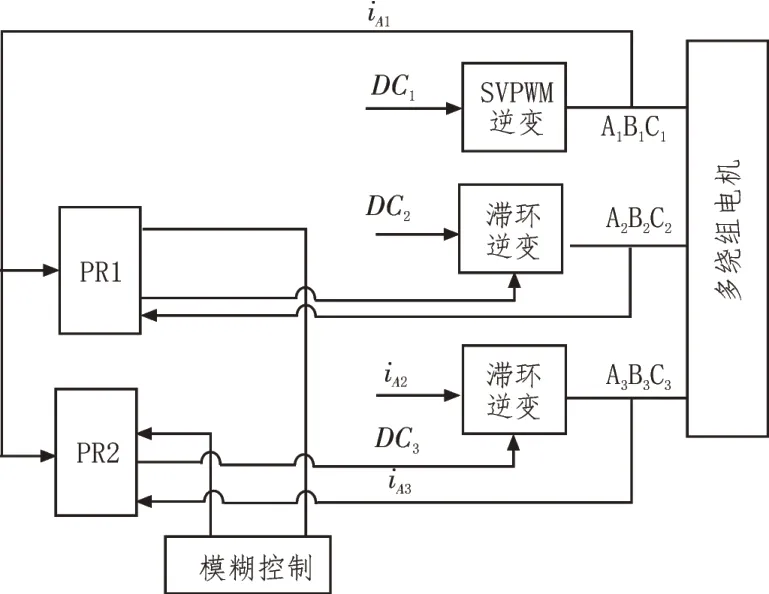
圖2 多繞組永磁同步電機(jī)控制策略框圖
1.4 多繞組永磁同步電機(jī)的數(shù)學(xué)模型
多繞組永磁同步電機(jī)是一個(gè)非線性系統(tǒng),具有強(qiáng)耦合、多變量、多輸入的特點(diǎn)。為了便于分析及模型的建立,現(xiàn)做以下理想假設(shè):
1)三相繞組對(duì)稱分布,并將每套繞組空間位置對(duì)稱排列;
2)忽略鐵芯飽和,不計(jì)渦流和磁滯現(xiàn)象;
3)定子繞組電流在氣隙中產(chǎn)生的磁勢(shì)呈正弦分布,忽略高次諧波。
基于以上假設(shè),可得在自然坐標(biāo)下多繞組永磁同步電機(jī)的數(shù)學(xué)模型。
電壓方程為:

磁鏈方程為:

式中:

其中,θ表示轉(zhuǎn)子磁極位置與定子A 相繞組軸間的電角度;LS表示電機(jī)電感系數(shù)矩陣;Ls1,Ls2,Ls3分別為3套繞組自身的自感系數(shù);Lr1,Lr2,Lr3分別為繞組1與繞組2、繞組1與繞組3、繞組2與繞組3之間的互感系數(shù);Lm1,Lm2,Lm3分別為繞組1與繞組2、繞組1與繞組3、繞組2與繞組3之間的漏感系數(shù);ψf為永磁體磁鏈。
電磁轉(zhuǎn)矩方程為:
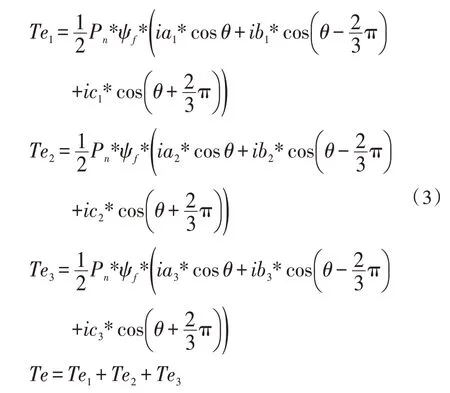
式中,Pn為電機(jī)的極對(duì)數(shù)。
系統(tǒng)的運(yùn)動(dòng)方程為:

式中,ωm表示機(jī)械角頻率;J為轉(zhuǎn)動(dòng)慣量;TL表示負(fù)載轉(zhuǎn)矩。
2 電機(jī)模塊1矢量控制策略
2.1 矢量控制原理
多繞組永磁同步電機(jī)的每套繞組均可作為一個(gè)獨(dú)立的電機(jī)模塊,因此電機(jī)模塊1 的PMSM 控制系統(tǒng)采用轉(zhuǎn)速、電流雙閉環(huán)控制。同時(shí),采用勵(lì)磁電流id=0 控制以最大限度利用電流。
當(dāng)矢量控制策略采取id=0 時(shí),電磁轉(zhuǎn)矩僅與交軸轉(zhuǎn)矩電流iq相關(guān),經(jīng)傳感器測(cè)得電機(jī)模塊1 的定子電流ia、ib、ic,通過坐標(biāo)變換得出電機(jī)模塊1 的d軸和q軸直流分量id和iq,再分別與對(duì)應(yīng)的和做差,運(yùn)用PI 調(diào)節(jié)得到dq坐標(biāo)系下相應(yīng)的電壓信號(hào),隨即旋轉(zhuǎn)變換得到αβ坐標(biāo)系下的定子相電壓向量。最終利用SVPWM 技術(shù)調(diào)制逆變器的開關(guān)信號(hào)[9-10],以實(shí)現(xiàn)對(duì)電機(jī)的控制。
2.2 電機(jī)模塊1控制策略建立
將變換后的繞組1 的dq坐標(biāo)系中的分量解耦后對(duì)繞組1 進(jìn)行電流控制。繞組1 的分量由d-q旋轉(zhuǎn)變換獲得,將參考電壓(即電流調(diào)節(jié)器的輸出與補(bǔ)償量的和)施于PWM 調(diào)制器,獨(dú)立控制單繞組定子電流。同時(shí),該控制方式使電機(jī)中6k±1(k=1,3,5…)次諧波被映射到z1-z2 平面,從而有助于諧波控制并減少電機(jī)損耗[11]。
2.3 電機(jī)模塊1仿真結(jié)果分析
為驗(yàn)證電機(jī)本體模型,以及電機(jī)模塊1 的矢量控制效果,在Matlab/Simulink 環(huán)境下對(duì)電機(jī)模塊1的控制策略進(jìn)行仿真。其中,電機(jī)參數(shù)為:Rs=2.875 Ω,Ls1=Ls2=Ls3=0.167,Lr1=Lr2=Lr3=0.075,Lm1=Lm2=Lm3=0.098,J=0.017 kg·m2,ψf=0.182 7 Wb,Pn=12 。系統(tǒng)的仿真時(shí)間是1 s。
電機(jī)模塊1 空載啟動(dòng),參考轉(zhuǎn)速為1 500 r·min-1,電機(jī)運(yùn)行到0.5 s 時(shí),突加負(fù)載轉(zhuǎn)矩TL=30 N·m。
圖3 顯示了電機(jī)轉(zhuǎn)速波形,可觀察電機(jī)發(fā)動(dòng)、變速及加載過程。在矢量控制下,電機(jī)很快上升到給定轉(zhuǎn)速1 500 r·min-1并保持穩(wěn)定,在0.5 s 突加負(fù)載,電機(jī)轉(zhuǎn)速稍有降低,但隨即迅速趨于穩(wěn)定。電機(jī)轉(zhuǎn)速在電機(jī)啟動(dòng)、轉(zhuǎn)速調(diào)節(jié)及穩(wěn)定運(yùn)行時(shí)段則保持較為平穩(wěn)的狀態(tài)。
圖4 與圖5 所示為電機(jī)模塊1 定子電流波形圖和電磁轉(zhuǎn)矩波形圖。由仿真結(jié)果可以看出,電機(jī)模塊1 定子電流在0.5 s 突加負(fù)載后仍呈正弦分布,且電磁轉(zhuǎn)矩在0.5 s 處發(fā)生負(fù)載突變后能在短時(shí)間達(dá)到新的給定值30 N·m,趨于新的平衡。各曲線均能在極短的時(shí)間內(nèi)達(dá)到給定值,因此,具備良好的動(dòng)態(tài)性能。
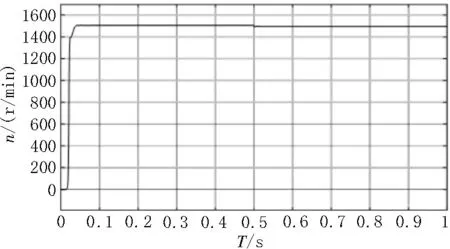
圖3 電機(jī)模塊1轉(zhuǎn)速波形圖
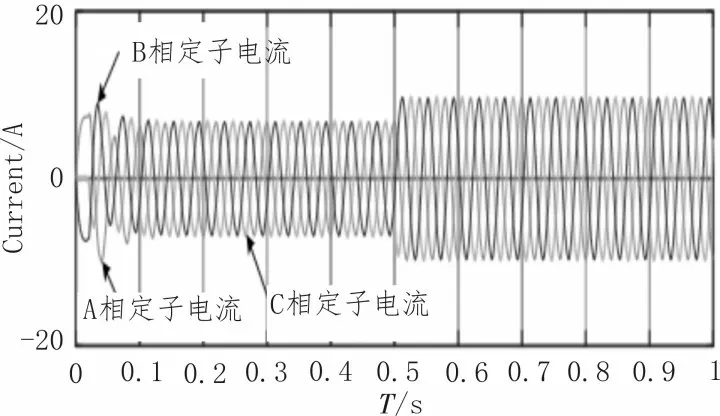
圖4 電機(jī)模塊1定子電流波形圖
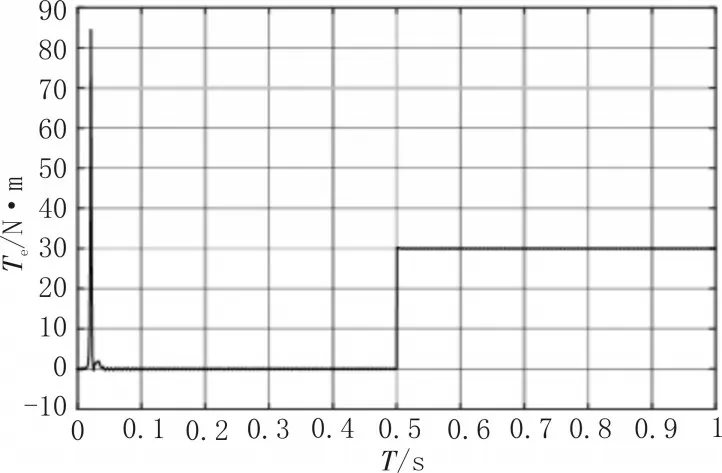
圖5 電機(jī)模塊1電磁轉(zhuǎn)矩波形圖
由電機(jī)模塊1 仿真結(jié)果可看出電機(jī)本體模型基本準(zhǔn)確,驗(yàn)證了一套繞組作為一個(gè)獨(dú)立模塊的可行性。
3 電機(jī)模塊2與電機(jī)模塊3的電流跟蹤
3.1 PR控制原理
圖2 所示的多繞組永磁同步電機(jī)的控制策略,參考繞組電流iA1已由電機(jī)模塊1 經(jīng)SVPWM 矢量控制獲取,多繞組永磁同步電機(jī)3 套繞組必須在同相位的定子電流驅(qū)動(dòng)下才能保持旋轉(zhuǎn)磁場(chǎng)同步,避免電機(jī)堵轉(zhuǎn)。為了使其余繞組電流跟蹤參考繞組電流相位,選擇合適的控制器成為關(guān)鍵,而電流控制器的性能很大程度限制了電機(jī)的運(yùn)行性能。PI 控制器可控制有效值,但無法保證無靜差追蹤交流輸入信號(hào)。在靜止坐標(biāo)系下,PR 控制將2 個(gè)恒定頻率的閉環(huán)極點(diǎn)引入控制器傳遞函數(shù)的jω軸上,利用該頻率下的諧振提高恒定頻率的增益,以達(dá)到對(duì)該頻率下的交流信號(hào)進(jìn)行無靜差跟蹤的目的[12-14],無須考慮耦合項(xiàng)和前饋補(bǔ)償項(xiàng),從而使控制算法更加簡(jiǎn)便易行[15-16]。基于此,文中提出采用兩個(gè)相同的PR 控制器將其余兩套繞組電流進(jìn)行對(duì)參考電流iA1的跟蹤。根據(jù)內(nèi)模原理[17],PR 控制器的傳遞函數(shù)為:

式中,Kp表示比例常數(shù),Ki表示積分時(shí)間常數(shù),ω0為諧振頻率。
當(dāng)給定的交流信號(hào)是諧振頻率ω0,即s=jω0時(shí),積分器的幅值趨于無限大,便能無靜差跟蹤交流輸入信號(hào)[18]。實(shí)際上當(dāng)電機(jī)運(yùn)行時(shí),定子的角頻率在不斷改變,若使ω0=ω,則可達(dá)到定子電流自適應(yīng)調(diào)節(jié)的目的。
3.2 電流相位跟蹤的誤差比對(duì)分析
電機(jī)模塊2 與電機(jī)模塊3 的繞組電流均通過電流滯環(huán)策略獲取,如圖2 所示。電機(jī)模塊1 的繞組電流iA1作為參考電流,模塊2 與模塊3 的繞組電流均采用相同的PR 控制器進(jìn)行參考電流的跟蹤,即模塊2與模塊3 的繞組電流一致,可滿足模塊2 的繞組電流iA2與參考電流iA1的相位一致,實(shí)現(xiàn)3 套繞組電流同矢量位。
該控制策略以參考電流iA1與繞組2 的反饋電流iA2的電流差e作為輸入,并根據(jù)誤差e和Kp、KR的關(guān)系制定模糊規(guī)則。系統(tǒng)實(shí)時(shí)更新誤差e,對(duì)其進(jìn)行模糊推理得出Kp、KR的校正值,以校正PR 系數(shù),從而實(shí)現(xiàn)動(dòng)態(tài)跟蹤。最后,設(shè)定ωc=10,KR=100,KP=4,得到模塊2 跟蹤模塊1 的電流波形如圖6 所示。
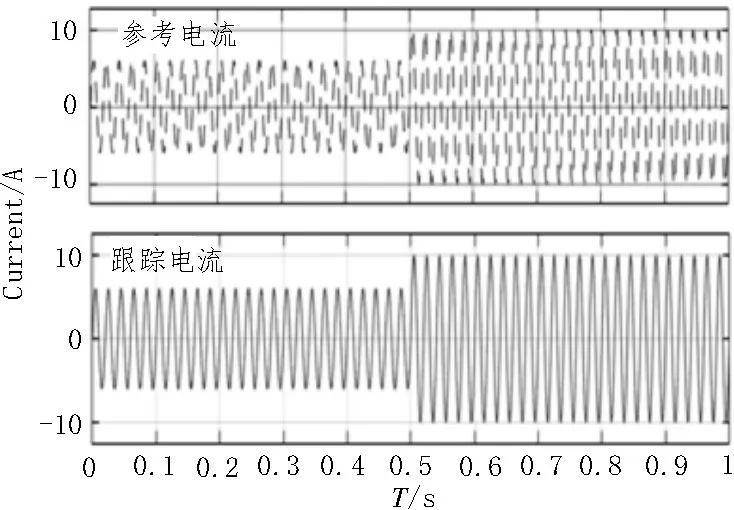
圖6 模塊2繞組電流跟蹤模塊1繞組電流波形圖
由圖6 可知,電機(jī)模塊2 的輸出電流iA2與參考電流iA1基本一致,說明采用PR 控制可以很好地實(shí)現(xiàn)輸出對(duì)參考電流穩(wěn)態(tài)的無靜差跟蹤,實(shí)現(xiàn)了多個(gè)繞組電流間的相位同步,其跟蹤迅速且誤差小。解決了多個(gè)繞組間電流需相位一致的問題,提高了鎖相的精度。
4 電機(jī)整體系統(tǒng)仿真分析
為了驗(yàn)證多繞組永磁同步電機(jī)控制系統(tǒng)方案的可行性,對(duì)圖1 所示的系統(tǒng)結(jié)構(gòu)圖和圖2 所示的控制策略進(jìn)行多繞組多模塊電機(jī)的仿真驗(yàn)證,觀察每個(gè)電機(jī)模塊的定子電流波形和電機(jī)整體的轉(zhuǎn)速波形。電機(jī)模型仿真參數(shù)仍采用上述參數(shù),逆變器的3 組電源均采用311 V;給定轉(zhuǎn)速ω=1 500 rad/s;電機(jī)負(fù)載為一個(gè)30 N·m 的階躍信號(hào),在0.5 s 時(shí)跳變。電流控制器滯環(huán)寬度H=20 A;PR 控制器參數(shù)KP=4,KR=100;外環(huán)轉(zhuǎn)速控制器參數(shù)KP=0.14,Ki=7;系統(tǒng)仿真時(shí)間為1 s。
電機(jī)模塊2 與電機(jī)模塊3 的繞組電流波形如圖7所示。由仿真結(jié)果可看出,模塊2 與模塊3 的繞組電流同上述圖4 的模塊1 的繞組電流基本一致,實(shí)現(xiàn)了3 套繞組電流相位同步。同時(shí),采用PR 控制很好地將反饋電流實(shí)時(shí)跟蹤參考電流,響應(yīng)速度快且抗干擾能力強(qiáng)。因此解決了對(duì)于不同電機(jī)模塊下多個(gè)繞組電流間相位如何保持同步這一難點(diǎn),證明了文中研究方案的可行性。
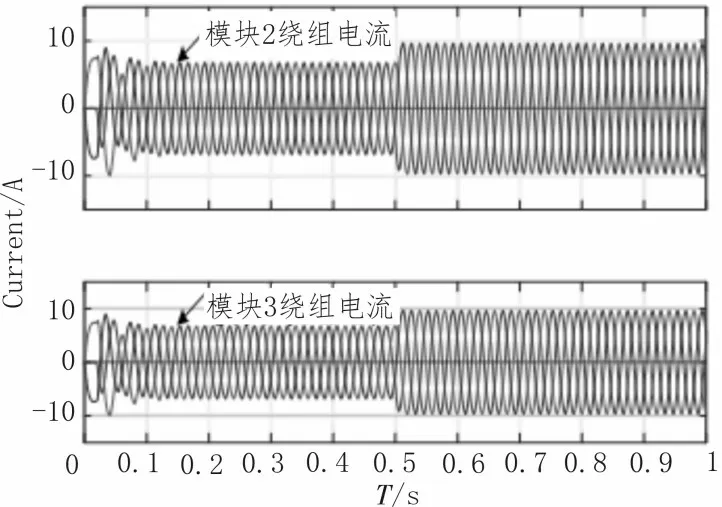
圖7 模塊2與模塊3繞組電流波形圖
圖8 給出采用PR 控制策略后繞組2 反饋電流和繞組1參考電流的FFT分析結(jié)果。由此可見,運(yùn)用PR控制方法可基本抑制輸出電流的高次諧波量,從而實(shí)現(xiàn)校正電流的畸變率。此時(shí)的THD 為1.23%,系統(tǒng)的穩(wěn)態(tài)精度得到了很大的提高,反饋電流波形和參考電流波形的相移幾乎為零,實(shí)現(xiàn)了無靜差跟蹤。
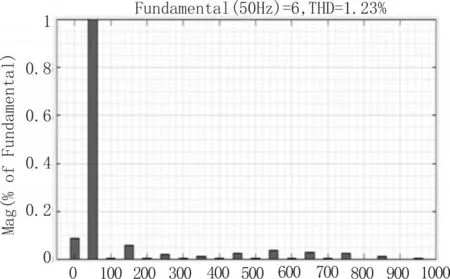
圖8 模塊2繞組電流與模塊1繞組電流的FFT分析
圖9 為多繞組永磁同步電機(jī)轉(zhuǎn)速波形圖,與圖3電機(jī)模塊1 的轉(zhuǎn)速波形基本一致。多繞組電機(jī)能迅速響應(yīng)到給定轉(zhuǎn)速1 500 r·min-1并保持穩(wěn)定,在0.5 s處突加負(fù)載跳變,電機(jī)轉(zhuǎn)速有輕微脈動(dòng),但立刻又維持在穩(wěn)定狀態(tài)。電機(jī)轉(zhuǎn)速在電機(jī)起動(dòng)、轉(zhuǎn)速調(diào)節(jié)及穩(wěn)定運(yùn)行時(shí)段處于較為平穩(wěn)的狀態(tài),且動(dòng)態(tài)性能良好。由此,多繞組永磁同步電機(jī)將一套繞組單獨(dú)作為獨(dú)立的電機(jī)模塊調(diào)節(jié)轉(zhuǎn)速,可達(dá)到參考轉(zhuǎn)速;3 套繞組同時(shí)工作時(shí),亦可達(dá)到預(yù)計(jì)轉(zhuǎn)速,證明了文中對(duì)于多繞組永磁同步電機(jī)中每一套繞組可作為單獨(dú)的電機(jī)模塊,且模塊間獨(dú)立并協(xié)調(diào)這一設(shè)計(jì)方案的正確性及可行性。
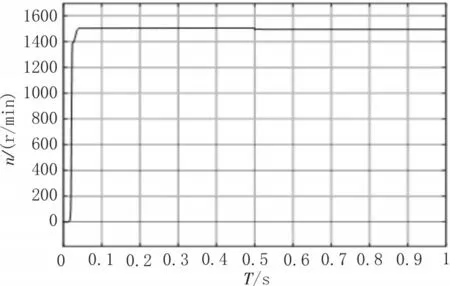
圖9 多繞組永磁同步電機(jī)轉(zhuǎn)速波形圖
5 結(jié)論
文中提出并設(shè)計(jì)了多繞組永磁同步電機(jī),即一種將多繞組永磁同步電機(jī)的每套繞組作為一個(gè)電機(jī)模塊,各個(gè)模塊獨(dú)立并協(xié)調(diào)的設(shè)計(jì)方案,以適應(yīng)太陽能無人機(jī)上具備多條可變直流母線的新型能源管理系統(tǒng)。提出了基于PR 控制將反饋電流用以跟蹤參考電流的控制策略。仿真結(jié)果表明,PR 控制實(shí)現(xiàn)了電機(jī)模塊2 與電機(jī)模塊3 的繞組電流對(duì)電機(jī)模塊1 的繞組電流的跟蹤,保證了3 套繞組電流間的相位同步。同時(shí),采用PR 控制降低了高次諧波對(duì)于電機(jī)的損耗并且避免了旋轉(zhuǎn)磁場(chǎng)不同步造成堵轉(zhuǎn)這一問題。該設(shè)計(jì)方案將多繞組永磁同步電機(jī)模塊化可以滿足太陽能無人機(jī)上新型能源管理系統(tǒng)的技術(shù)需求。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36