基于RANSAC 的道路影像控制點選取方法研究
2021-04-20 09:30:52方林波石昊蘇路雅寧武鵬輝
電子設(shè)計工程 2021年6期
方林波,石昊蘇,路雅寧,武鵬輝
(西北政法大學(xué) 商學(xué)院,陜西西安 710122)
近年來,隨著計算機處理速度的快速提升,基于多傳感器融合的移動近景攝影快速測量新技術(shù)得到了迅速發(fā)展[1-2]。一個典型的近景移動測量系統(tǒng)是將IMU、CCD 和GPS 3 種類型的傳感器集成在一起,如在移動載體上,用IMU 和GPS 兩種傳感器對移動載體進行組合定位,同時,對CCD 拍攝獲取的立體影像進行處理,最后基于前方交會計算出立體影像中地物的坐標(biāo)位置[3-7]。從以上過程可以看出,自主定位問題是移動測量的一個基本問題,在GPS 信號受到干擾(或遮擋)的情況下,由于漂移等造成的誤差逐漸積累增加,僅僅依靠IMU 進行獨立定位,無法獲得所需要的精度。為解決這一問題,數(shù)字可量測影像(Digital Measurable Image,DMI)技術(shù)被引入到自主定位中,基于DMI 的坐標(biāo)信息、基于后方交會計算出移動載體的位置坐標(biāo),并將其與GPS、IMU 結(jié)合,形成DMI/IMU/GPS 組合定位系統(tǒng)[8-10],其優(yōu)點是把多種技術(shù)結(jié)合起來,使各子系統(tǒng)的優(yōu)勢互補,最終提高定位的精度和穩(wěn)定性。在影像匹配方面,這些研究均采用SIFT 算法對影像進行特征點的提取,但沒有對大量的特征點進行有效的分析和篩選,并提取控制點。控制點是影像中不受光照、形變和角度等變化影響的特征點,具有穩(wěn)定、準(zhǔn)確和分布均勻等特征。控制點的提取是影像匹配、圖像拼接、以及利用道路立體影像進行車輛定位的前提。在影像匹配方面通常采用SIFT 算法對影像進行特征點的提取,針對該算法的改進和擴展一直是研究熱點[11-13]。
道路立體影像中地物平面層次多、背景復(fù)雜,控制點往往隱沒在背景噪音中,直接用SIFT 算法獲取的特征點多數(shù)是背景產(chǎn)生的,可靠性和均勻性較差,必須通過特定的方法將其中穩(wěn)定、準(zhǔn)確、分布均勻的控制點篩選出來,才能使下一步的移動測量、定位導(dǎo)航高效準(zhǔn)確。
文中針對道路立體影像的SIFT 特征,提出了基于RANSAC 和均勻度理論相結(jié)合的控制點篩選方法,該方法保證了特征點選取的均勻、準(zhǔn)確。實驗表明,該方法能夠從道路立體影像中提取出穩(wěn)定、準(zhǔn)確、分布均勻的控制點,為后續(xù)的定位導(dǎo)航奠定基礎(chǔ)。
1 相關(guān)理論
1.1 SIFT算法
在圖像匹配的眾多算法中,SIFT 算法具有良好的尺度和空間旋轉(zhuǎn)的不變性,得到了廣泛的應(yīng)用,該算法提取特征分為以下4 步[14-15]:
1)尺度空間極值檢測。該步驟的主要任務(wù)是得到多尺度圖像序列,如式(1)所示。

其中,σ為尺度因子,G為σ的高斯核,I為原圖像,L為I在尺度σ下的空間表示。
在式(1)的基礎(chǔ)上建立DOG 金字塔,如式(2)所示。

DOG 金字塔中每個像素均與相鄰以及上、下鄰層的26 個鄰域像素進行比較,如果是極值點,則該點為候選的特征點,并記錄該點的位置與尺度。
2)精確確定關(guān)鍵點。主要任務(wù)是確定關(guān)鍵點的參數(shù),并將不穩(wěn)定的邊緣響應(yīng)點篩選掉。
3)確定特征點的梯度模值和方向。應(yīng)用公式(3)、(4)計算出特征點(x,y)處的梯度模值m(x,y)和方向θ(x,y)值。


每個特征點具有3 個方面的屬性值,分別為所在的位置、尺度和方向。
4)生成SIFT 特征描述子為了增強特征點的穩(wěn)健性,每個特征點用相鄰的種子點描述,即每個特征點用4×4×8=128 維的向量描述。
1.2 RANSAC算法
即使經(jīng)過多重篩選,兩幅影像間的SIFT 特征點匹配的結(jié)果中還會有許多的錯誤匹配對,需要進一步優(yōu)化。隨機抽樣一致性估計算法(Random Sample Consensus,RANSAC)可以進行較為魯棒的優(yōu)化[16]。RANSAC 的主要特點隨著迭代次數(shù)的增加模型的參數(shù)正確概率會相應(yīng)提高。
1.3 均勻度理論
定義1 獨占球:對n維歐氏空間的至多可數(shù)的有限點集s,對于任意x∈s,記M(x)=min(d(x,y)),y∈s,y≠x,則 存 在x1∈s使 得M(x)=d(x,x1),記 緊 鄰MP(x)=x1,M(x)為緊鄰距離。其中d(·)是歐氏距離。把x作為球的中心,M(x)/2 為球的半徑的閉球,B(x)稱為x的獨占球,其體積記為v(x)。B(x)的外切閉立方體的數(shù)量很多,但體積相等,記其一為CU(x),稱為x的獨占體,體積記為vc(x)。
引理1 在一定的邊界內(nèi)點集中,所有點的獨占球互不重疊,而且這些獨占球最近的空間關(guān)系是相切的。
定義2 均勻度:設(shè)pt:S?A?Rn為一個格局。獨占球的總體積為為多面體A的體積,稱為格局S的均勻度。
2 維的均勻度定義:長方形內(nèi)所有點的總獨占圓面積與長方形總面積的π 4 倍之比稱為格局均勻度。把點的總獨占圓面積記為a,長方形面積記為A,則格局均勻度的值為。
2 基于RANSAC和均勻度理論的立體影像控制點篩選
文中方法包括4 個主要步驟:1)SIFT 特征點提取;2)基于區(qū)域均勻度的特征點初步篩選;3)立體像對特征點匹配;4)基于RANSAC 和均勻度的特征點篩選。
2.1 SIFT特征點提取
道路立體影像平面層次多、背景復(fù)雜,而且受天氣、光線影響較大,獲得穩(wěn)定、準(zhǔn)確、分布均勻而且盡量多的特征點是道路立體影像進一步研究和應(yīng)用的前提和難點。SIFT 特征點對圖像各種變化具有較強的穩(wěn)定性,相對邊緣、角點、形狀等特征,更適合道路立體影像。
2.2 基于區(qū)域均勻度的特征點初步篩選
區(qū)域均勻度是影像中某一特定區(qū)域的均勻度。用a(x,y)表示影像的某一個SIFT 特征點的坐標(biāo),t為設(shè)定的均勻度閾值。特征點初步篩選的步驟如下:
1)把a(x,y)作為中心,距其上、下、左、右各20 像素為邊長,形成一個正方形;
2)對該正方形中所包含的SIFT 特征點計算均勻度;
3)當(dāng)均勻度小于t時,除去該正方形中梯度峰值最小的特征點;
4)重復(fù)2)和3)直到該正方形內(nèi)均勻度大于或等于t。
文中實驗中t設(shè)為0.28。
通過以上步驟,大量SIFT 特征點中滿足設(shè)定均勻度、大梯度峰值的特征點被篩選了出來。
2.3 立體像對特征點匹配
對立體影像進行SIFT 特征點提取和初步篩選后,需要對像對中的左圖和右圖進行特征點匹配,以查找像對中的同名像點。取出左圖的一個SIFT 特征點,基于K-D 樹搜索策略,在右圖SIFT 特征點中找出最近鄰(NN)特征點和次近鄰(SCN)特征點。計算NN 距離和SCN 距離的比值,當(dāng)該比值小于設(shè)定的閾值時,接受這一對匹配點,閾值越低,SIFT 匹配點越少,匹配越穩(wěn)定。但穩(wěn)定的代價是損失掉大量有效的特征點,所以該閾值取值較為關(guān)鍵。根據(jù)查閱文獻和實驗,該閾值取在[0.6,0.7]區(qū)間最為合適。
2.4 基于RANSAC和均勻度的特征點篩選
基于RANSAC 算法的SIFT 特征點篩選方法在圖像拼接、圖像配準(zhǔn)等方面應(yīng)用廣泛。由于RANSAC 主要依靠符合模型的匹配點數(shù)量的大小為評判條件,而忽略了這些匹配點的分布情況,所以只適合于特征點分布較為均勻的圖像,對于特征點分布不均勻的圖像,不但不能提高其篩選結(jié)果的均勻度,甚至?xí)岩恍┓浅V匾植驾^為離散的特征點除去,降低了篩選的質(zhì)量。道路立體影像平面層次多、特征點分布不均勻,直接使用RANSAC 進行篩選效果差。
文中將均勻度理論引入RANSAC 中,將符合模型的匹配點數(shù)量與該點集均勻度的乘積作為評判標(biāo)準(zhǔn),使得RANSAC 對特征點的篩選既滿足幾何一致性,又滿足特征點的均勻性。基本步驟如下:
1)利用2、3 節(jié)中介紹的方法對像對進行特征點匹配,得到的匹配點數(shù)量設(shè)為M,根據(jù)公式N=log(1-pn)/log[1-(1-a)m]確定隨機采樣次數(shù)N,其中,pn=0.95,m=4,a為數(shù)據(jù)錯誤率;
2)利用隨機選取的4 對匹配點計算初始單應(yīng)矩陣;
3)設(shè)置約束條件,滿足者為內(nèi)點,不滿足者為外點。約束條件設(shè)置方法為:把左圖中的匹配點通過單應(yīng)矩陣進行變換,對變換后的匹配點與右圖對應(yīng)的匹配點進行歐式距離計算,此歐式距離d即為約束條件,d>4 的點為外點,d≤4 的點為內(nèi)點;
4)計算內(nèi)點集的均勻度L,記內(nèi)點數(shù)量c與均勻度乘積R=cL,如果R大于等于設(shè)定閾值時,用內(nèi)點數(shù)重新估計單應(yīng)矩陣,結(jié)束本輪運算;如果R小于閾值,則重新在數(shù)據(jù)集中選取數(shù)據(jù)樣本,重復(fù)2)、3)、4)三步;
5)經(jīng)過N次迭代,得到N個內(nèi)點集,選取R值最大的內(nèi)點集,算法結(jié)束。
3 實驗結(jié)果分析
文中采用的道路立體影像大小為1 392×1 040像素,在野外道路、鄉(xiāng)村道路和城市道路3 個場景下進行實驗,首先對立體像對進行SIFT 特征提取,然后對文中算法和傳統(tǒng)的RANSAC 算法的篩選結(jié)果進行比較。
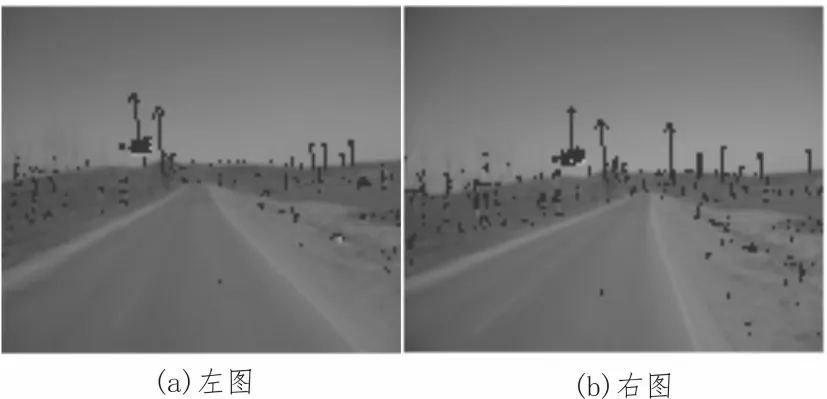
圖1 像對的SIFT特征點檢測
圖1 是野外道路立體影像的SIFT 特征點提取圖,圖1(a)、(b)分別為像對中的左圖和右圖,包含的特征點數(shù)分別為308 和508。
圖2 是該像對的SIFT 特征點進行區(qū)域均勻化后的特征圖,像對的左圖和右圖分別得到144 和235 個特征點。對比圖1 和圖2 可以看出:經(jīng)過區(qū)域均勻化,扎堆的特征點得到了有效抑制,特征點的分布更加均勻。
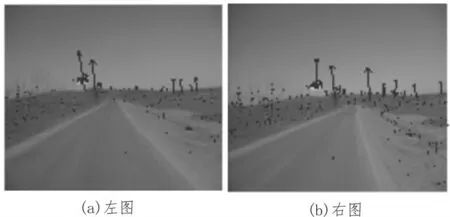
圖2 區(qū)域均勻化后的SIFT特征點
圖3 是對野外道路立體影像進行特征點匹配和匹配點篩選的4 個實驗結(jié)果。圖3(a)是對SIFT 特征點進行直接匹配的結(jié)果,匹配點數(shù)為79;圖3(b)是對SIFT 特征點進行區(qū)域均勻化后進行匹配的結(jié)果,匹配點數(shù)為48;圖3(c)是對圖3(a)匹配點利用RANSAC算法進行篩選的結(jié)果,匹配點數(shù)為17;圖3(d)是對圖3(b)匹配點利用文中方法(2.4 節(jié))進行篩選的結(jié)果,匹配點數(shù)為15。可以看出,圖3(c)中的匹配點都集中到了兩個區(qū)域,均勻度較差;圖3(d)中匹配點均勻度分布有明顯的改善。
圖4 是對鄉(xiāng)村道路立體影像進行特征點匹配和匹配點篩選的4 個實驗結(jié)果。圖4(a)是對SIFT 特征點進行直接匹配的結(jié)果,匹配點數(shù)為204;圖4(b)是對SIFT 特征點進行區(qū)域均勻化后進行匹配的結(jié)果,匹配 點數(shù)為82;圖4(c)是對圖4(a)匹配點利用RANSAC 算法進行篩選的結(jié)果,匹配點數(shù)為64;圖4(d)是對圖4(b)匹配點利用文中方法(2.4 節(jié))進行篩選的結(jié)果,匹配點數(shù)為35。可以看出,圖4(c)中的匹配點過于扎堆,均勻度較差;圖4(d)中匹配點均勻度分布有明顯改善。
圖5 是對城市道路立體影像進行特征點匹配和匹配點篩選的4 個實驗結(jié)果。圖5(a)是對SIFT 特征點進行直接匹配的結(jié)果,匹配點數(shù)為236;圖5(b)是對SIFT 特征點進行區(qū)域均勻化后進行匹配的結(jié)果,匹配點 數(shù) 為97;圖5(c)是 對圖5(a)匹 配點利用RANSAC 算法進行篩選的結(jié)果,匹配點數(shù)為52;圖5(d)是對圖5(b)匹配點利用文中方法(2.4 節(jié))進行篩選的結(jié)果,匹配點數(shù)為42。可以看出,圖5(c)中的匹配點過于集中,均勻度較差;圖5(d)中匹配點均勻度分布有明顯的改善。
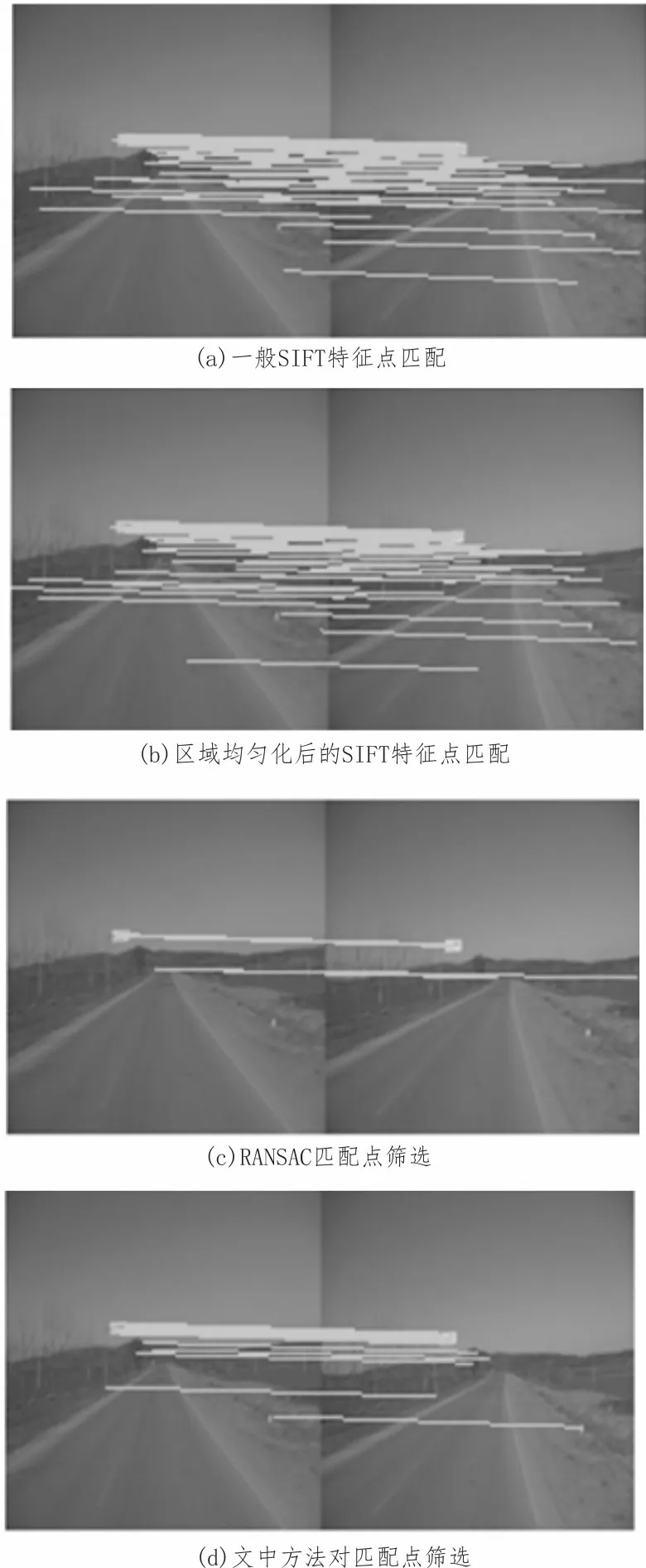
圖3 野外道路像對匹配點篩選對比
圖6 是傳統(tǒng)方法與文中方法在3 種典型場景(野外道路、鄉(xiāng)村道路、城市道路)的篩選結(jié)果對比圖,可以看出:
1)對于3 種類型的圖像,在經(jīng)過區(qū)域均勻化后,匹配點數(shù)量均大幅減少,匹配正確率優(yōu)于傳統(tǒng)方法。
2)文中方法篩選出的匹配點分布的均勻度大大提升。
綜上所述,文中方法相對傳統(tǒng)方法是一種更有效的道路立體影像特征點提取和篩選的方法。
4 結(jié)束語
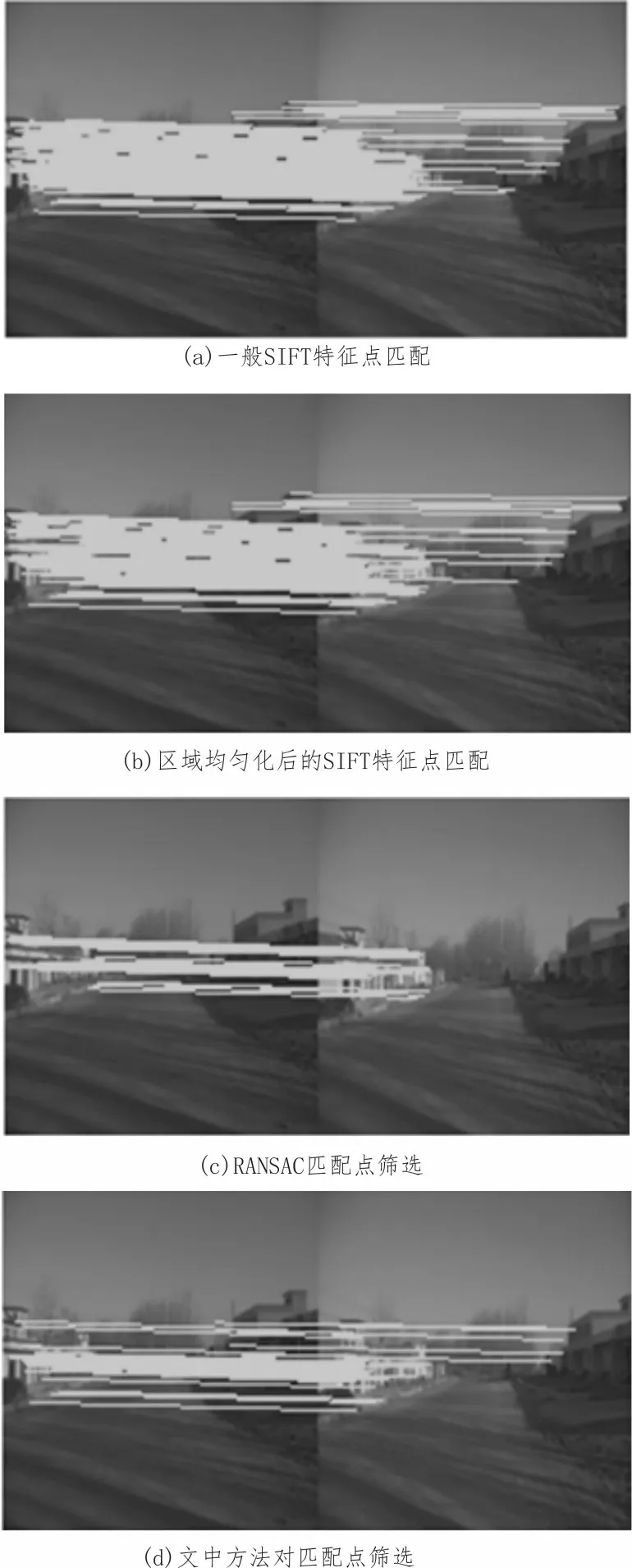
圖4 鄉(xiāng)村道路像對匹配點篩選對比
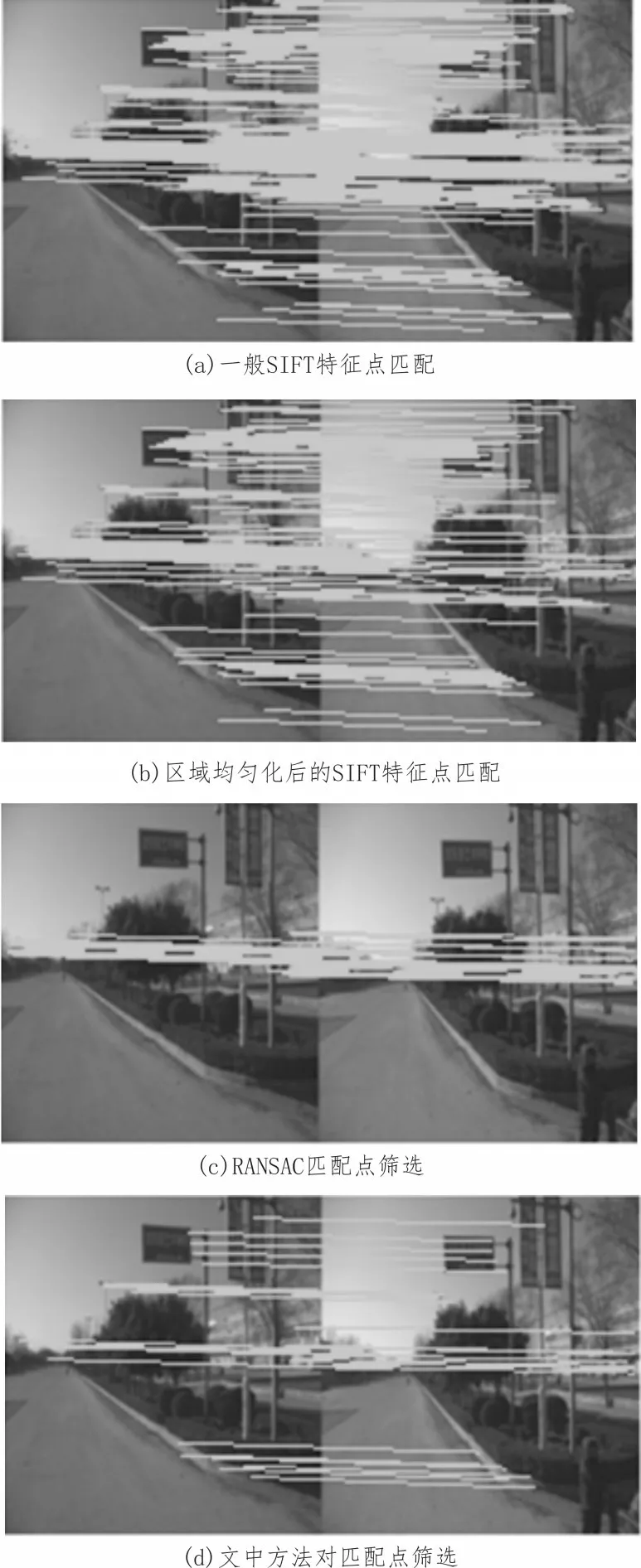
圖5 城市道路像對匹配點篩選對比
基于DMI 的車輛定位導(dǎo)航技術(shù)是移動測量領(lǐng)域的前沿和趨勢,其中,立體影像控制點的篩選是難點和關(guān)鍵,控制點必須是準(zhǔn)確、穩(wěn)定的特征點,而且分布盡量均勻。目前,立體影像控制點篩選技術(shù)還未見報道。文中結(jié)合SIFT 算法、RANSAC 算法和均勻度理論,將均勻度理論引入RANSAC-SIFT 過程中,提出了一套道路立體影像控制點篩選方法。實驗結(jié)果表明,該方法能夠獲取準(zhǔn)確、穩(wěn)定、分布均勻的控制點,為立體影像匹配、控制點運動軌跡的Kalman估算、以及車輛自主定位導(dǎo)航的研究奠定基礎(chǔ)。
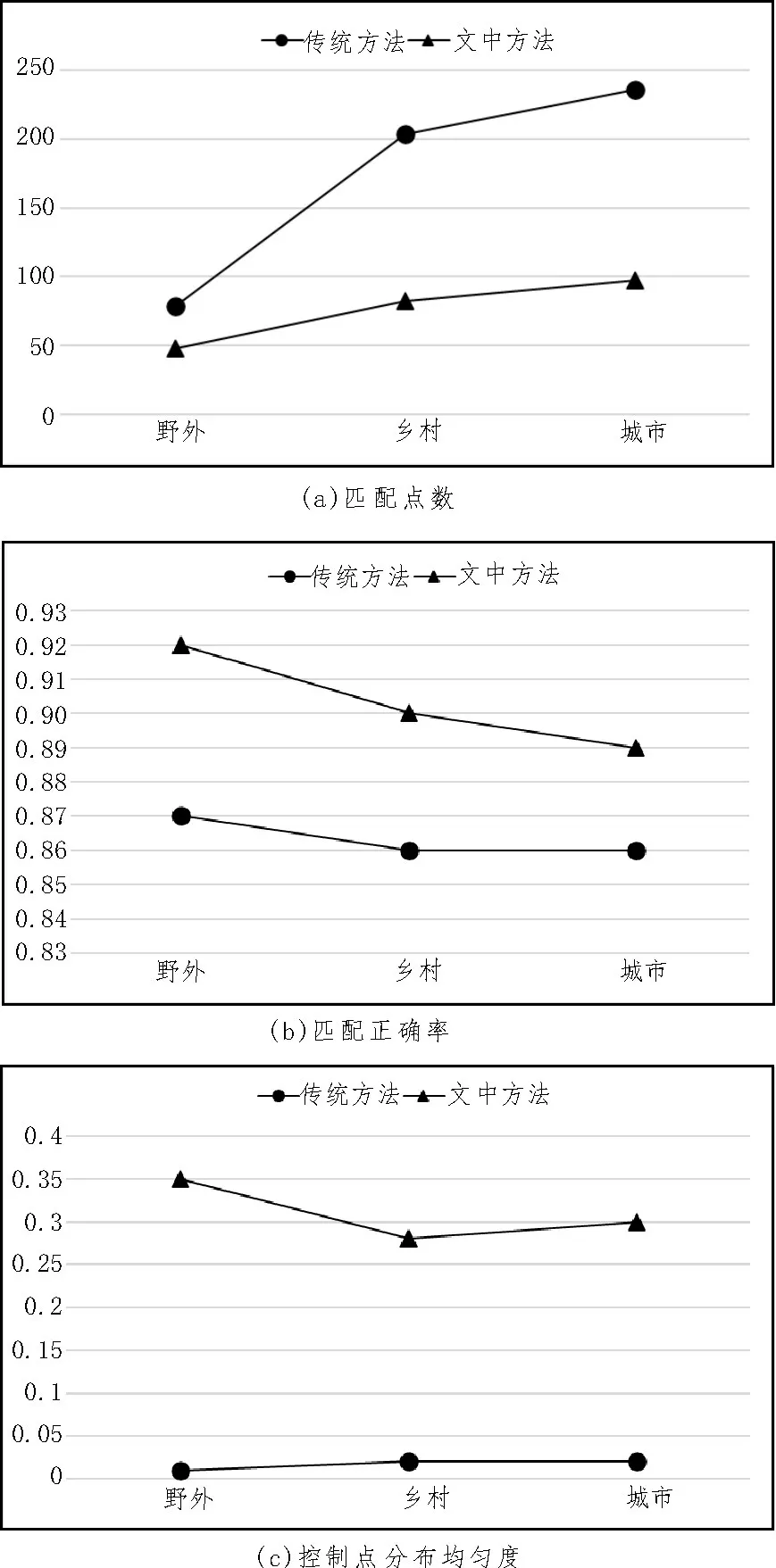
圖6 兩種方法的控制點篩選結(jié)果對比
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
兒童故事畫報(2019年5期)2019-05-26 14:26:14
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56