兩種偽距定位精度分析及計算程序的實現
2021-04-22 02:53:36楊久東龔櫟澎
導航定位學報 2021年2期
李 韌,楊久東,龔櫟澎,梁 鵬
兩種偽距定位精度分析及計算程序的實現
李 韌,楊久東,龔櫟澎,梁 鵬
(華北理工大學 礦業工程學院,河北 唐山 063210)
針對卡爾曼濾波偽距定位方法難以建立準確的定位模型,容易造成濾波發散,導致定位精度降低的問題,比較分析了卡爾曼濾波偽距定位和星頻雙差偽距定位兩種偽距定位模型,利用三個點的靜態觀測數據,采用全球定位系統(GPS)的衛星偽距觀測值和廣播星歷文件計算得到測站點坐標,將兩種偽距定位模型計算的坐標與赫戈(HGO)軟件靜態解算的坐標進行精度對比與分析。結果顯示,卡爾曼濾波偽距定位方法的誤差在6 m內,星頻雙差偽距定位方法的誤差在3 m內,對總體均方根誤差(RMSE)進行分析,星頻雙差偽距定位結果低于卡爾曼濾波偽距定位,證明星頻雙差偽距定位精度高于卡爾曼濾波偽距定位精度,星頻雙差偽距定位數學模型是可行的。
偽距定位;卡爾曼濾波偽距定位;星間單差;星頻雙差;編程實現
0 引言
隨著科技的發展,衛星導航定位為社會做出了重大貢獻,偽距定位是其中不可或缺的一部分。它利用接收機的偽距觀測數據及廣播星歷文件計算測站坐標,是導航定位中最常用的定位方法,主要用于導航定位中初始概略位置的定位[1]。隨著對精密單點定位(precise point positioning, PPP)的研究深入,作為其基礎方法及定位理論的偽距單點定位方法及理論也是極其重要的[2-3]。偽距定位已經不僅僅局限于傳統的偽距定位,通過不斷深入研究,已經衍生出多種偽距定位解算模型[4-5]。研究發現,采用最小二乘迭代法對偽距進行解算,其迭代次數少但定位精度較低[6-7];采用卡爾曼(Kalman)濾波法解算,可使精度有所提高,但迭代次數過多[8];很多學者研究使用最小二乘法和Kalman濾波法組合使用進行偽距解算,以減少迭代次數,提高定位精度[9]。偽距單點定位方法的精度一般為米級,組合偽距觀測值定位精度可高于單一偽距觀測值精度[10],全球衛星導航系統(global navigation satellite system, GNSS)靜態精密單點定位模型,點位精度可達毫米級[11-13]。
偽距單點定位方法及理論的研究雖然很多,但關于偽距定位的數學模型的表述卻不夠詳細,筆者通過對偽距定位理論的進一步研究,整理出Kalman濾波偽距定位和星間頻間偽距定位模型,以派森(Python)3.8為工具進行編程,并利用實測數據驗證該數學模型的可行性、正確性及程序的穩定性,同時將兩種偽距定位方法的定位結果進行比較,分析兩種偽距定位方法的定位效果及精度,證明星頻雙差偽距定位精度高于卡爾曼濾波偽距定位精度,星頻雙差偽距定位數學模型是可行的。
1 偽距定位模型
1.1 Kalman濾波偽距定位模型
Kalman濾波方法是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法,在GNSS定位中應用較為廣泛,適用于高精度衛星導航定位領域。首先建立Kalman濾波模型,即





濾波器的遞推公式為


通過Kalman濾波計算出測站的位置分量后,偽距定位坐標計算公式為
由于單獨每個歷元的數據都可解算一個測站點坐標,各歷元數據可視作是獨立觀測值,可通過均方根誤差(root mean square error, RMSE)指標,判別各歷元解算坐標與平均值的變化幅度,坐標各分量的RMSE值和坐標的RMSE值的計算方法為
1.2 星間頻間偽距定位模型
根據偽距定位原理,可將偽距公式進行變形整理后得

參考衛星的觀測方程與其余衛星的觀測方程進行星間作差,可得

GPS衛星信號播發頻率L1是由調制基本頻率154×10.23 MHz獲得的頻率,L2是由調制基本頻率120×10.23 MHz獲得的頻率,所以有


因為星間頻間偽距定位方法是依據L1、L2頻率間倍率關系作差進行計算定位的,但衛星的頻率發射不穩定,存在一定的頻率波動,在后期解算中,需要對系數進行一系列調整,才能利用最小二乘計算出較為精確的測站的偽距定位坐標。最小二乘解算中的權陣采用同一歷元下衛星高度角定權模型,權陣為方差陣的逆,其方差計算方法為


觀測誤差方程為

由最小二乘求解得

由式(17)可以求得坐標改正值,將坐標改正值代入式(18)可以求得接收機坐標為
2 定位坐標解算及精度分析
在利用Python語言進行兩種偽距定位模型的程序設計時,建立了不同的模塊來實現偽距定位坐標的計算,主要包括文件讀取、坐標轉換、時間統一、衛星位置計算、偽距定位模型計算、精度評價等6大模塊,定位程序主要處理流程如圖1所示。

圖1 程序設計流程圖
在計算偽距定位時,需要注意坐標系轉換。由于GPS定位求得的各種參數為1984世界大地坐標系(world geodetic coordinate system 1984, WGS84)下的結果,在測站坐標計算的過程中,需要根據實際測繪工作需要,將WGS84坐標轉換為站心坐標系。
運用本文所述的兩種偽距定位模型,選擇2019年11月河北省唐山市曹妃甸生態城控制網中C401、C410和GPS1三個控制點的靜態觀測數據進行試驗,C401與C410的距離為5493 m,C401與GPS1的距離為1950 m,C410與GPS1距離為4348 m。同步觀測時間為100 min,靜態接收機型號為海星達IRTK2型雙頻接收機,靜態數據文件為RINEX3.02文件,采樣間隔1 s,高度截止角為10°,因觀測時間較長,故選取觀測歷元中的300個歷元參與模型計算。程序自動計算1~300個歷元、兩個偽距定位模型中的定位坐標,同時使用中海達赫戈(HGO)基線解算軟件進行控制網解算,經嚴密二維約束平差后,最弱點中誤差的最大值為1.19 mm,符合精度要求。由于相對偽距定位模型的精度為米級,可以將HGO解算的二維約束平差結果作為真值使用。圖2至圖10為對兩種偽距定位模型進行比較的結果。
圖2至圖4為測站C401的坐標值(、、),圖5至圖7為測站C410的坐標值(、、),圖8至圖10為測站GPS1的坐標值(、、)。從圖2至圖10可知,三個測站的Kalman濾波偽距定位模型和星間頻間偽距定位模型的每個歷元解算的定位坐標,都出現了不同程度的波動,符合偽距定位的解算規律。在兩種定位方法模型解算的300個歷元坐標中:Kalman濾波偽距定位方法在前10個歷元處波動較大,原因在于,在動態濾波過程中,Kalman濾波需要一定的歷元數進行收斂,而收斂后的圖線波動較小,圖形表現較為平穩;星間頻間偽距定位模型解算的300歷元定位坐標,波動較大,大部分圖線波動在精密坐標圖線的上方與下方,其平均值與精密坐標圖線更為接近。
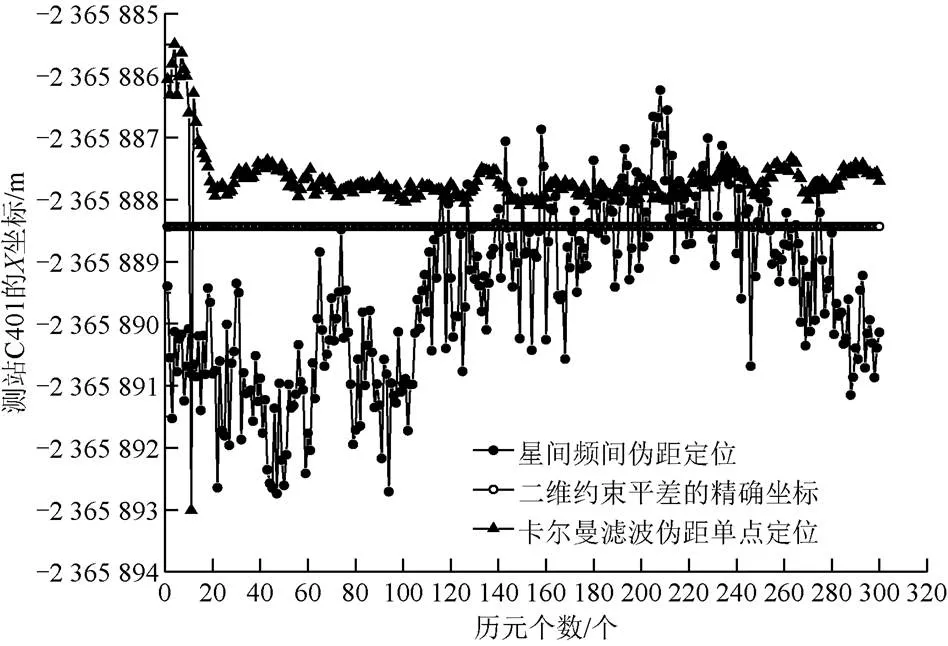
圖2 測站C401的X坐標值

圖3 測站C401的Y坐標值

圖4 測站C401的Z坐標值

圖5 測站C410的X坐標值
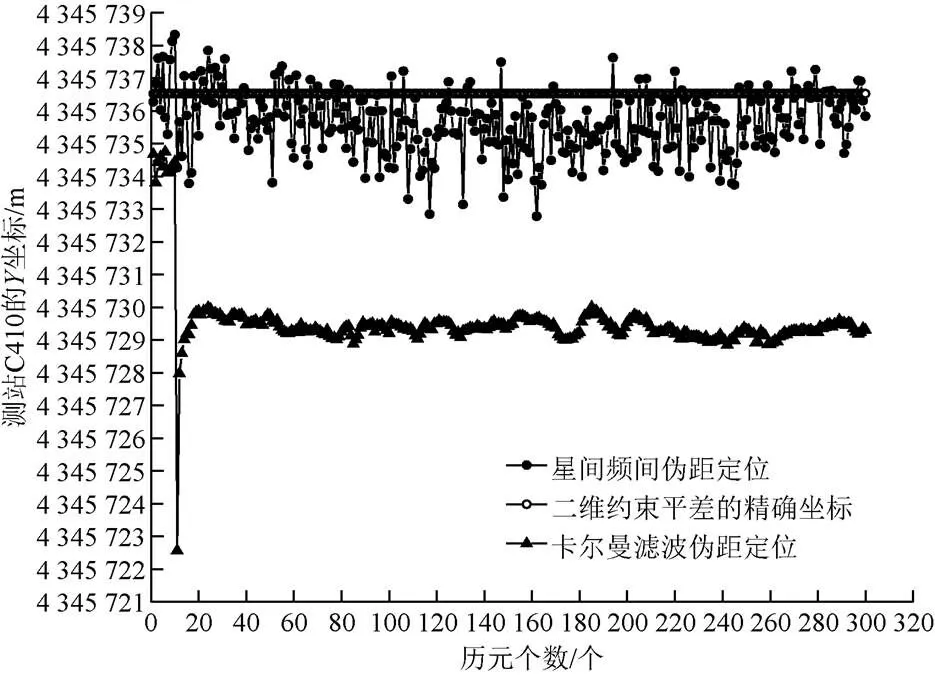
圖6 測站C410的Y坐標值
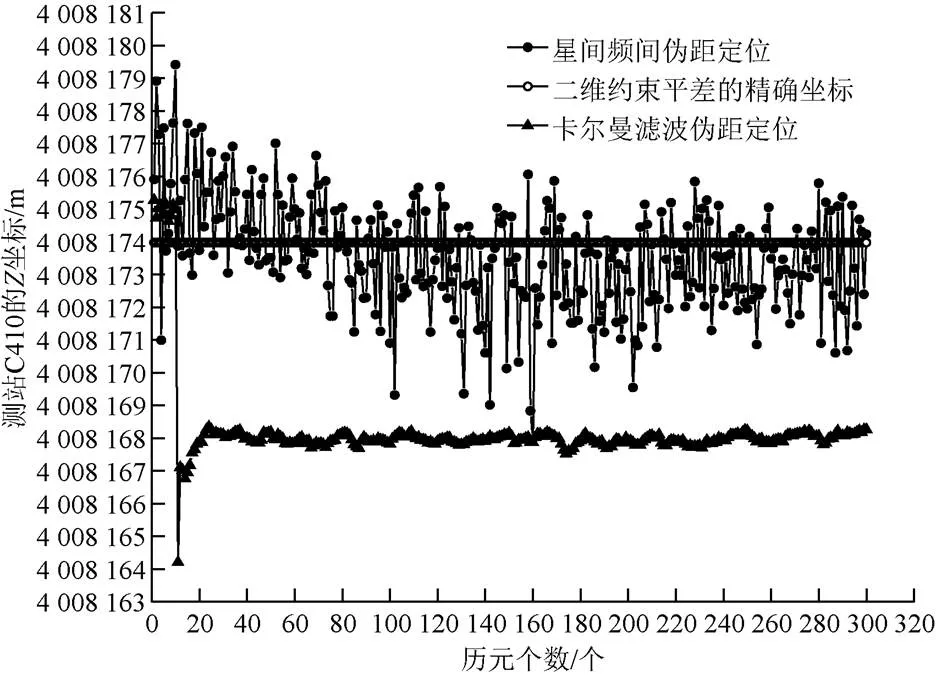
圖7 測站C410的Z坐標值
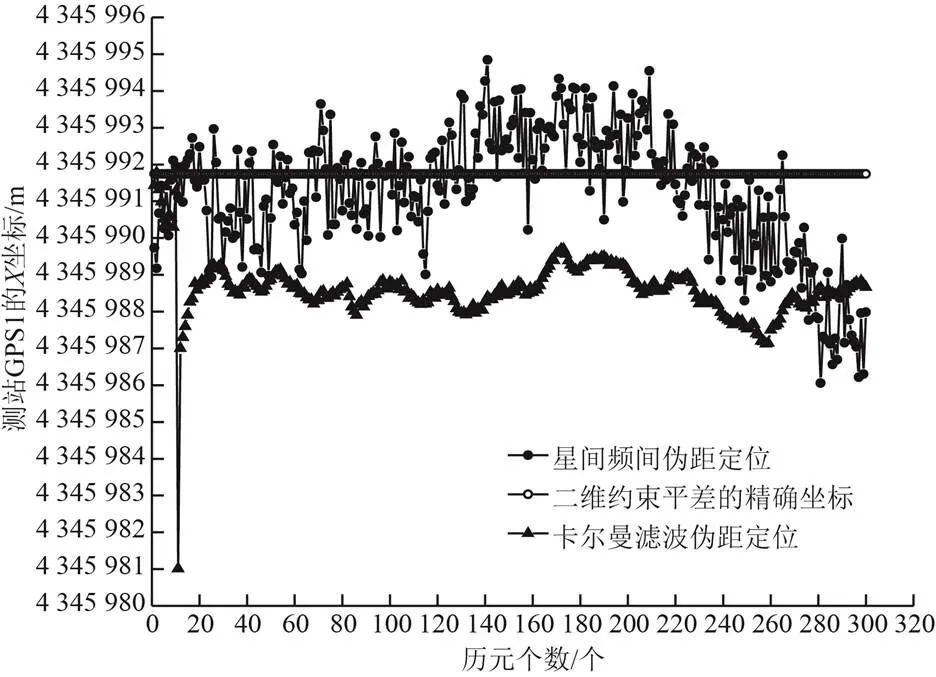
圖8 測站GPS1的X坐標值

圖9 測站GPS1的Y坐標值
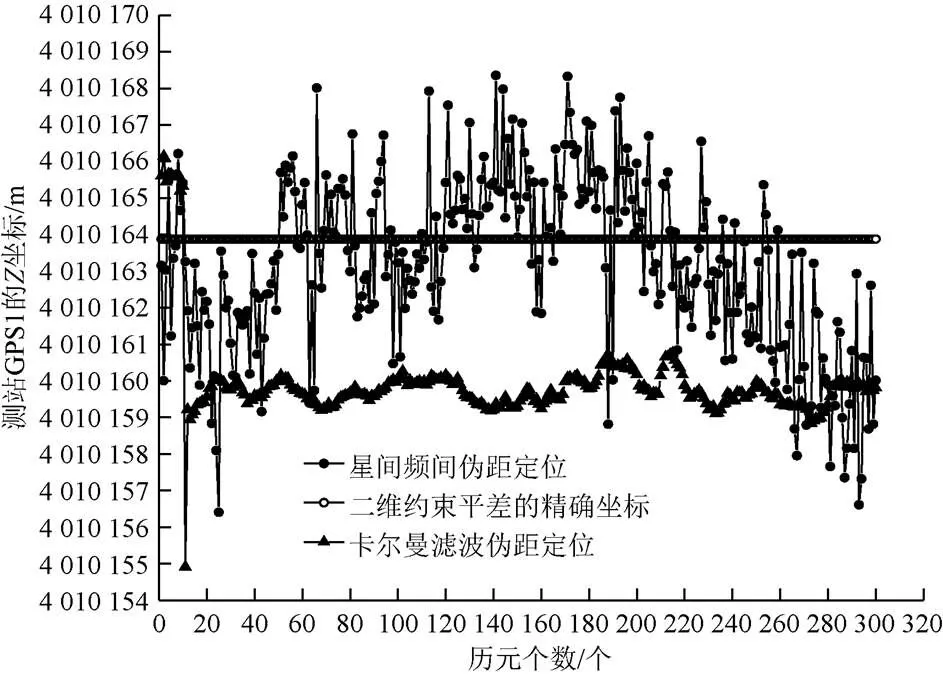
圖10 測站GPS1的Z坐標值


表1 測站定位坐標誤差及坐標變化范圍
為了更直觀地反映觀測值偏離真實有效數據值的波動情況,將其結果列于表2,RMSE值越小,表明誤差就越小,精度越高,偽距定位越準確。通過對表2進行分析可知,用兩種偽距定位方法在三個測站進行300個歷元的解算,三個測站的RMSE值表現一致,均是卡爾曼濾波偽距定位的坐標解算精度高于星間頻間偽距定位,而星間頻間偽距定位在三個測站上的RMSE、RMSE、RMSE的值均低于卡爾曼濾波偽距定位,其中測站C401、測站C410和測站GPS1的星間頻間偽距定位的總體均方根誤差RMSE比Kalman濾波偽距定位分別提升了48%、68%和24%。綜合分析,星間頻間偽距定位方法的定位精度要高于Kalman濾波偽距定位,但是坐標解算精度低于Kalman濾波偽距定位精度,主要原因可能在于選擇的解算模型不夠精確,在定位計算中發生了偏移,導致定位精度不高。
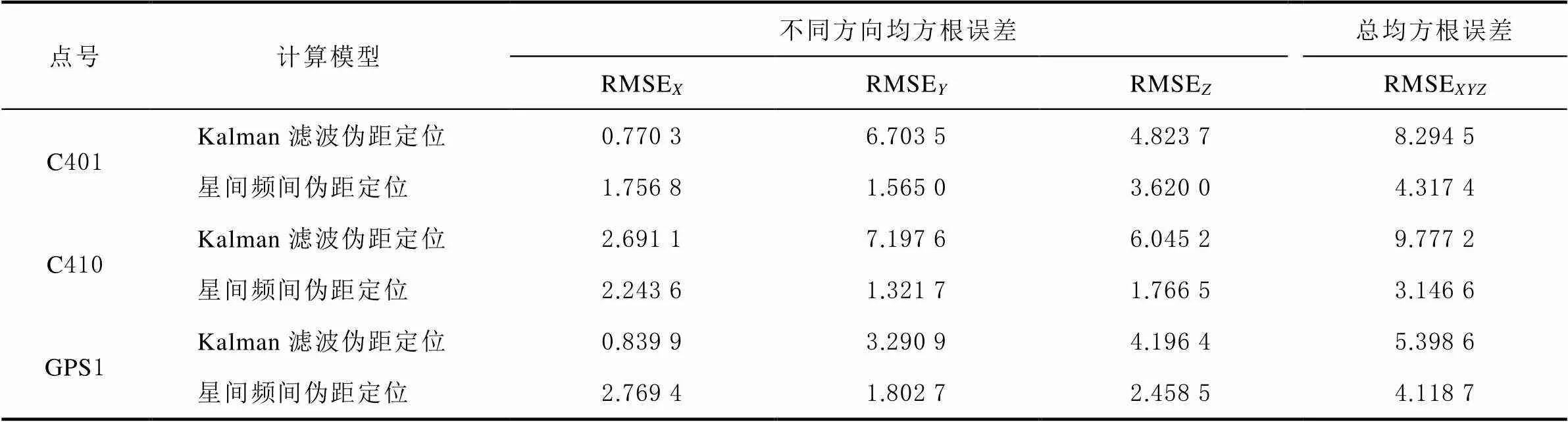
表2 測站RMSE值
3 結束語
本文對兩種偽距定位的數學模型進行分析和研究,用Python程序實現了Kalman濾波偽距定位模型、星間頻間偽距定位模型的計算,并利用靜態實測數據進行分析,測站點的偽距定位精度在米級,Kalman濾波偽距定位方法計算的、、坐標誤差在6 m內,星間頻間偽距定位方法計算的、、坐標誤差在3 m內,星間頻間偽距定位的精度高于Kalman濾波偽距定位。在經過大量實測數據的計算檢驗后,表明筆者編制的偽距定位程序可以滿足要求。由于實驗數據區域較小,屬于短基線解算,對流層及電離層誤差影響較小,而且僅僅采用GPS單系統的偽距觀測值進行了偽距計算,未加入其它衛星系統的數據進行聯合解算。若在后期能加入其它衛星系統的數據進行有效組合偽距定位,則能進一步提高偽距定位精度及穩定性。
[1]衛柳艷. GPS網絡RTK系統的算法及定位精度研究[D]. 南京: 河海大學, 2006: 2-6.
[2]CAI Changsheng, GAO Yang. Modeling and assessment of combined GPS/GLONASS precise point positioning[J]. GPS Solutions. 2013, 17(3): 223-236.
[3]CAI C S, KUANG C L, DAI W J. Performance analysis of combined GPS/GLONASS precise point positioning[J]. Science of Surveying & Mapping, 2012, 37(3): 183-185.
[4]原洪峰, 楊龍, 蔣德. 不同實驗條件下GPS偽距定位精度分析[J]. 全球定位系統, 2005, 17(5): 23-26.
[5]DING He, SUN Fuping, LI Yaping, et al. Modeling and performance analysis of combined BDS/GPS/GLONASS precise point positioning[J]. Journal of Geodesy & Geodynamics, 2016, 36(4): 303-307.
[6]王祖蔭. 卡爾曼濾波與經典最小二乘法[J]. 巖礦測試, 1993, 12(1): 23-26.
[7]LI P, ZHANG X H. Modeling and performance analysis of GPS/GLONASS/BDS precise point positioning[C]//China Satellite Navigation Conference (CSNC). Proceedings of Lecture Notes in Electrical Engineerin: Volume III. Berlin, Heidelberg: Springer, 2014: 251-26. DOI: https: //doi. org/10.1007/978-3-642-54740-9_23[2020-05-18].
[8]王小冬. 卡爾曼濾波在衛星導航中的應用研究[D]. 大連: 大連海事大學, 2008: 5-9.
[9] 劉春, 馬穎. 改進卡爾曼濾波在北斗偽距定位中的研究[J]. 電子測量與儀器學報, 2016, 23(5): 779-785.
[10] 李旺, 喬靈娜. 約束條件下GPS偽距定位精度分析[J]. 測繪與空間地理信息, 2019, 42(4): 76-78
[11] 王趁香. GPS/BDS精密單點定位算法研究與實現[D]. 阜新: 遼寧工程技術大學, 2017: 5-9
[12] 崔立魯, 杜石, 余寒, 等. BDS/GPS組合偽距單點定位性能分析與評價[J]. 測繪工程, 2019, 28(2): 17-20, 25.
[13] 楊徐, 徐愛功, 秦小茜, 等. 高度角定權模型的BDS/GPS偽距單點定位分析[J]. 導航定位學報, 2017, 5(2): 72-78, 85.
[14] 李征航, 張小紅. 衛星導航定位新技術及高精度數據處理方法[M]. 武漢: 武漢大學出版社, 2009: 65-68.
[15] 符華年, 張旭東, 胡玉坤. GPS靜態精密單點定位算法精度分析[J]. 測繪通報, 2019(2): 95-98. DOI: 10. 13474 /j. cnki. 11-2246. 2019. 0051.
[16] 郭平, 周適, 段太生, 等. 一種偽距單點定位的數學模型研究及程序實現[J]. 全球定位系統, 2019, 44(4): 53-60.
Accuracy analysis and program implementation of two kinds of pseudo range positioning
LI Ren,YANG Jiudong,GONG Lipeng,LIANG Peng
( Mining Engineering College,North China University of Technology,Tangshan,Hebei 063210,China)
The Kalman filter pseudo-range positioning method finds it difficult to establish an exact positioning model and filtering divergence could be easily caused which reduce the accuracy of position. In point of these problems, we have compared and analyzed two pseudo-range positioning model,namely Kalman filter pseudo-range positioning model and star frequency double difference pseudo-distance positioning, taken advantage of static observation data measured by engineering at 3 points, gotten the satellite pseudo-distance measured data of the Global Positioning System (GPS) and measured position coordinates computed by broadcast ephemeris.Comparing and analyzing the accuracy of coordinates computed by the pseudo-distance positioning model and by the static HGO software, we can find that the error range of Kalman filter pseudo-range positioning model is within 6 m and the star frequency double difference pseudo-distance positioning is within 3 m. Analyzing the value of General Root Mean Square Error (RMSE), we can see that the positioning results of star frequency double difference pseudo-distance are all lower than the Kalman filter pseudodistance positioning. It has demonstrated that the accuracy of star frequency double difference pseudo-distance positioning is higher than the Kalman filter pseudo-distance positioning and its feasibility for star frequency double difference pseudo-distance positioning to locate math models.
pseudo range positioning;Kalman filter pseudo range positioning;single difference between stars;double difference between stars;programming implementation
P228
A
2095-4999(2021)02-0083-07
李韌,楊久東,龔櫟澎,等. 兩種偽距定位精度分析及計算程序的實現[J]. 導航定位學報, 2021, 9(2): 83-89.(LI Ren, YANG Jiudong, GONG Lipeng, et al. Accuracy analysis and program implementation of two kinds of pseudo range positioning[J]. Journal of Navigation and Positioning, 2021, 9(2): 83-89.)
10.16547/j.cnki.10-1096.20210213.
2020-06-17
國家自然科學基金項目(51904105)。
李韌(1996—),男,河北廊坊人,碩士研究生,研究方向為空間大地測量。
龔櫟澎(1995—),男,河北唐山人,碩士研究生,研究方向為空間大地測量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
