一種基于粒子群優化的無鍵相虛擬動平衡算法研究*
2021-04-22 13:23:54陳立芳晏資文郭儀翔李瑞花
機電工程 2021年4期
陳立芳,晏資文,李 棟,周 博,郭儀翔,李瑞花
(北京化工大學 機電工程學院,北京 100029)
0 引 言
在高速、高溫、高載荷作用下,旋轉機械的轉子會發生變形、磨損及同心度的變化,使轉子由于質心偏離旋轉中心引起振動,進而導致整機振動過大。不平衡是旋轉機械振動產生的主要原因,其中,質量不平衡引起的振動故障最常見且危害大,需通過動平衡的方法來解決。
在現場動平衡中,大多采用影響系數法。但該方法基于精確的相位檢測,且試重一般憑經驗進行選取,加上試重條件、測試環境、儀器精度等方面的影響,難以獲取準確的影響系數,致使動平衡過程反復,啟停機次數增加,影響企業效益[1]。所以在滿足平衡要求的前提下,應盡量減少啟停機次數,提高動平衡效率[2-5]。
虛擬動平衡法基于有限元法,通過仿真構建與實際轉子尺寸和參數相符的有限元模型,在轉子配重位置處施加虛擬不平衡激勵,對其進行動力學穩態分析。JAlLAN A K和MOHANTY A R[6,7]利用基于有限元技術的仿真模型,成功地檢測了轉子-軸承系統的故障狀態和位置;SHRIVASTAVA A和MOHANTY A R[8]通過建立轉子系統的降階模型,并對轉子-盤-軸承系統進行數值模擬,估計了單平面的動平衡參數(幅值和相位角);劉鋼旗等人[9]提出了一種基于無試重模態的柔性轉子二階動平衡方法,通過有限元軟件進行了建模,對不平衡量進行了逐階平衡;運俠倫等人[10]建立了主軸轉子系統的動力學模型,利用矢量合成原理對配重方案進行了尋優匹配,快速、準確地獲取了配重質量和相位;賓光富[11]通過仿真構建了與軸系結構尺寸和運行參數相符的轉子動力學有限元模型,分別在各跨轉子平衡位置處施加了不平衡激勵,計算出了相應的加重影響系數;章云[12]提出了一種高速轉子分布式不平衡量無試重識別方法,通過分析比較了擴展影響系數動平衡方法與轉子動力學模型,得出了動力學傳遞函數與影響系數之間的關聯關系,并在轉子動平衡實驗平臺上進行了實驗,對所提出的方法加以了驗證。
近年來,智能優化算法為解決復雜程度的問題提供了一條全新的途徑,成為國內外學者關注的研究熱點[13],其思想也逐步應用到了動平衡領域。陳哲超[14]提出了一種基于自適應粒子群優化(APSO)的自動平衡控制算法,結合BP神經網絡,實現了一次啟停機跟蹤后系統的自動平衡控制,并在變速模擬試驗臺上進行了驗證;王星星[15]將一種基于遺傳交叉因子改進的粒子群算法,引入到轉子動平衡最小二乘影響系數法中,用實例說明了改進后的算法具有很好收斂特性和全局搜索能力,并通過實驗驗證了該方法的可行性。
以上有關動平衡的研究均需要轉子不平衡量的相位信息,因此,該方法對于無法安裝鍵相傳感器的場合并不適用。王亞昆[16]提出了一種無需相位信息的動平衡方法,該方法通過兩次特殊位置試重,計算出了配重大小及位置;但是該方法求解誤差大,實驗取得的減振效果僅有11%~32.1%;且其動平衡的精度也較低;吳元東[17]針對存在不平衡量偏大的某型航空發動機,利用3個特殊位置的試重(三圓法),在無鍵相傳感器的情況下,實現了風扇轉子的本機平衡,有效降低了低壓轉子的振動水平;但利用該方法至少需要啟停機5次。
針對某些轉子的特殊結構,不具有輸出相位信號的條件,又急需進行動平衡的現狀,筆者提出一種基于粒子群優化的無鍵相動平衡算法;在無鍵相信號的情況下,通過對轉子模型進行有限元分析,利用實測的振幅和粒子群搜索尋優技術,只需一次試重便能獲得原始不平衡量的大小和位置,大大提高動平衡的精度和效率,最后通過實驗對該方法的實用性和有效性進行驗證。
1 算法理論基礎
1.1 轉子動力學理論
根據轉子動力學理論,筆者首先建立懸臂雙支撐轉子的動力學響應模型及運動方程。其中,轉子渦動示意圖如圖1所示。

圖1 轉子渦動示意圖
根據圖1的轉子渦動示意圖,筆者建立軸心O的運動微分方程,即由不平衡質量產生的激振力所引起的強迫振動的微分方程,如下式所示:
(1)
(2)
式中:M—轉子系統質量,kg;m—偏心質量,kg;e—偏心距,mm;K—轉軸的剛度系數,N/mm;C—阻尼,N·s/mm;Ω—旋轉角速度,rad/s;t—時間變量,s;x—水平位移,mm;y—垂直位移,mm。
此處令z=x+iy,并經過歐拉公式變換,其復數形式的運動方程如下:
(3)

(4)
式中:wn—系統的固有圓頻率,Hz;ξ—阻尼比。
其中,wn和ξ只與系統本身參數有關,與初始條件和狀態無關。
二階常系數線性非齊次微分方程(4)的特解可表示為:
z=Aei(Ωt-θ)
(5)
式中:A—不平衡響應幅值,mm;θ—機械滯后角,°。
(6)
式中:λ—頻率比。
由式(6)可知,振動響應的幅值僅與不平衡質量和偏心距有關,并與二者的乘積質徑積成正比。因此,可以通過減小不平衡質量來減小其振動幅值。
1.2 粒子群基本原理
粒子群(particle swarm optimization, PSO)算法是在鳥類遷徙行為影響下發展起來的一種搜索尋優算法。粒子群中的每個粒子都代表實際問題的潛在解,由位置、速度和適應度值3個指標來表述其特征。適應度是粒子位置的目標函數值,粒子群根據適應度大小來判斷粒子位置的優劣[18],從而計算出個體極值和群體極值,粒子將依據這兩個極值,朝適應度指定的方向不斷地更新位置和速度,直至找到整個解空間的最優值。其中,個體極值是粒子迄今為止搜索到的最佳位置,群體極值是整個粒子群迄今為止搜索到的最佳位置。
粒子的速度和位置更新的公式為:
(7)
(8)

在搜索優化過程中,W值對算法的收斂性至關重要。當W較大時,全局搜索能力較強;當W較小時,局部搜索能力較好。為了加速收斂而不陷入局部最優,權值W的公式為:
(9)
式中:Wmax—最大權值;Wmin—最小權值;Smax—最大迭代次數。
通過調整,W將隨迭代次數s的增加而減小,使粒子前期速度較快,有利于全局搜索;后期速度較慢,有利于局部搜索。
PSO算法具有許多優點,如PSO算法即使從遠離最佳位置的起點(初始解)開始尋優,經過很多次迭代,也只需要耗費秒級的CPU時間,就能收斂到最優解。
PSO算法參數表如表1所示。
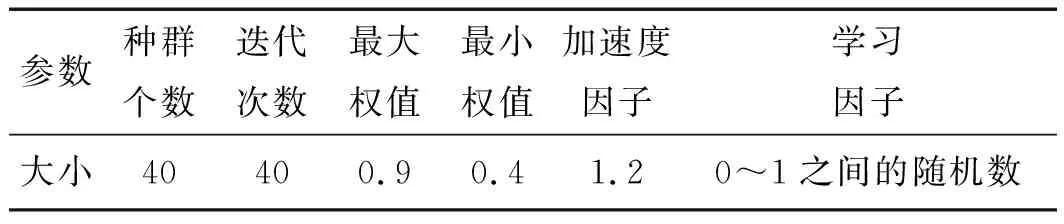
表1 PSO算法參數表
2 基于粒子群優化的動平衡算法
2.1 粒子群目標函數的構造
為了進行動力學分析,筆者用MATLAB開發了一套基于有限元法的轉子計算軟件,包括軸系建模、不平衡響應分析、模態分析、坎貝爾圖分析等多個模塊。經過比對發現,其計算結果與轉子軸承動力學分析商業軟件dyrobes之計算結果一致,故軟件的結果可供粒子群調用。
軟件計算流程圖如圖2所示。
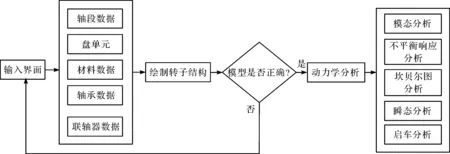
圖2 軟件計算流程圖
筆者在軟件中建立與實際轉子尺寸和參數相符的有限元模型,用實測臨界轉速加以校準。一般認為仿真計算的臨界轉速值與實測值誤差在5%以內合理,否則需調整模型參數[19]。建模正確后,通過在模型上添加虛擬激勵來進行穩態響應分析,并將整個算法封裝成一個函數f(m), 表示在該轉子指定狀態下,由質量m造成的虛擬振動振幅。由于有限元模型與實際轉子非常相似,于是可考慮當兩者穩態響應的振幅相等時,模型上的虛擬激勵就是實際轉子中存在的不平衡量。
按照粒子群算法步驟,可令粒子位置X=[X1,X2,…,X40]T=[m1,m2,…,m40]T,表示待求解的不平衡質量,并將其大小限制在實際要求的范圍內;同時,將轉子上實測基頻振幅A與虛擬振幅的差的絕對值作為粒子群的適應度函數F(m),如下式所示:
F(mi)=|A-f(mi)|
(10)
在算法中設定:適應度越小,則粒子位置越好。這樣一來,粒子位置(不平衡質量)將會朝著適應度減小的方向變化。到算法迭代結束時,F(m)必然得到最小值,一般為納米級,便可以近似認為A=f(mi),即:在模型中,找到了一個可以造成振幅A的虛擬不平衡質量mi。由于模型和實際轉子高度相似,那這個值可認為就是實際轉子中的不平衡質量。這樣便能根據實測的基頻振幅A來逆向推導,得到轉子上造成振幅A的不平衡質量mi。
2.2 不平衡矢量尋優
設初始不平衡質量為m0,相位為β,要實現動平衡,需在(180°+β)的相位上添加與m0大小相同的配重。因此,執行動平衡的首要條件是獲得m0和β。
設在某測振截面上用電渦流傳感器測取水平方向獲取的振動原始信號,對該信號進行FFT變換,然后計算出基頻的序號j,則不平衡響應的相位角φ為:
(11)
式中:ImXj—頻域信號的第j個虛部;ReXj—頻域信號的第j個實部值。
因為沒有鍵相參考,相位角φ只是用來判斷不平衡力變化的方向。
設第一次在該截面測的原始振動信號經FFT之后得到的相位角為φ0,提取的基頻幅值為A0,則有:
A0=f(m0)
(12)
由前面推導可知,m0可利用粒子群尋優得到。為了獲得其確切位置,需要再次啟車運行到同一轉速,往配重盤上添加一個試重m1,相位為α,筆者直接選取大小為m0的質量作為試重。這時系統總的不平衡量為原始不平衡量m0與試重m1的合成;假設合成后不平衡量是m01,此時同樣在該測點處測得振動信號經FFT之后的相位角為φ1,基頻振幅為A1,則有:
A1=f(m01)
(13)
以同樣的方法,由粒子群尋優得到m01,再由O、m0、m01、m1構成的平行四邊形,根據余弦定理得:
(14)
由于余弦函數是偶函數,在[-π,π]范圍內的同一函數值對應兩個自變量,且兩者互為相反數;設余弦函數的解為γ,則有:
α-β=π±γ,β=α±γ-π
(15)
所以根據式(11~15)就可以求解出原始不平衡量m0和相位β。
平衡過程中加重示意圖如圖3所示。

圖3 平衡過程中加重示意圖m0—原始不平衡質量;m1—試重質量;m01—m1與m0的合成質量;角度為α+γ的配重;α—m1的相位;β—m0的相位;γ—m0與m1的相位差

基于粒子群優化的無鍵相動平衡算法流程圖如圖4所示。
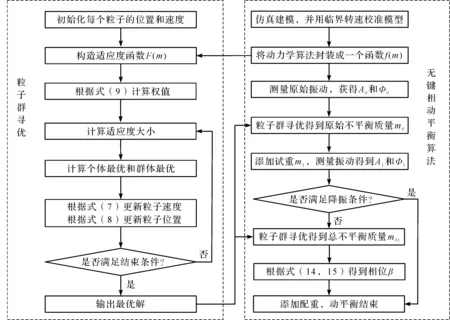
圖4 基于粒子群優化的無鍵相動平衡算法流程圖
3 仿真分析
該實驗所用的是螺旋槳懸臂轉子,轉子試驗臺如圖5所示。

圖5 轉子試驗臺
轉子上裝有螺旋槳和配重盤,測振箱內裝有采集卡和電渦流傳感器,采用同步整周期方式來采集振動信號,信號傳送至上位機通過軟件LabVIEW進行濾波、傅里葉變換,來提取基頻數據。
筆者用軟件建立與試驗臺上的轉子相似的有限元模型,其具體建模原則如下:(1)配重盤用等質量和慣性矩的盤單元表示,三槳葉螺旋槳按質量、轉動慣量等效成盤單元,并且原型與模型的質心在軸上的位置相同;(2)忽略倒角、外螺紋等結構特征;(3)深溝球軸承用兩個方向的剛度系數表示;(4)集中質量作用處、軸徑變化處、軸承支撐處均保證有支撐節點單元。
根據動力學參數相似、結構相似性等原則,筆者建立的轉子有限元模型如圖6所示。

圖6 轉子有限元模型
同時,筆者進行靜態分析,得到兩個不同型號的滾動軸承的節點11和節點20處的支反力分別為1 251 N和-519.5 N,利用計算軟件,結合該值可近似計算出軸承支撐剛度大小為255 672 N/mm和156 160 N/mm。
支撐剛度計算結果如圖7所示。

圖7 支撐剛度計算結果
筆者在6節點圓盤0°方向上添加一個60 g·m的不平衡量作為初始激勵,假設原先并不知道不平衡量大小和相位,運行軟件,利用有限元進行模態分析,得到一階臨界轉速為3 830 r/min,然后進行穩態響應分析,由于該轉子的振型是端部擺動,將靠近端部的7節點作為測點;將仿真的振動信號經過FFT之后,提取基頻振幅為70.8 μm,相位為0°;將這個振幅輸入到粒子群中,以原始不平衡量為尋優目標,以式(10)為適應度函數,運行軟件,幾秒后迭代結束,得到最小適應度f=1.012×10-9m,同時得到粒子的最優解為61 g·m(適應度值隨迭代次數增加而減少,說明誤差收斂,尋優目標一直朝最優解靠攏)。
與之前的設定值相比,初始不平衡量尋優誤差為1.6%。誤差較小,可以使用;接著隨機在6節點圓盤120°方向添加尋優得到的試重61 g·m,此時再次將7節點振動信號作FFT,得到振幅為70 μm,相位為297°;再次將該振幅代入到粒子群算法中,同理尋優之后根據式(14,15)得到試重與原始激勵的相位差剛好為120°,即原始不平衡量相位在0°或在240°方向。經過仿真可知:將6節點處不平衡力的相位變大時,所測振動信號的FFT相位將變小。因此,根據所得FFT相位由0°(360°)變化導297°,便認定添加試重后的總不平衡力往相位增大的方向變化了,所以原始不平衡力必在0°方向;往0°反方向180°添加虛擬配重61 g·m,得到7節點仿真響應2 μm,相比于原始響應減振97%。
通過以上詳細的分析可以證明,該方法是完全可行的。
4 實驗驗證
測試系統流程圖如圖8所示。

圖8 測試系統流程圖
由于該懸臂轉子進行仿真得到一階臨界轉速為3 830 r/min,實驗轉速選在1 020 r/min。首先在螺旋槳處裝上防護罩,啟車至4 500 r/min,讓轉子經過臨界轉速,根據升速過程中的實測Bode圖數據,判斷出實際轉子一階臨界轉速值為3 910 r/min,與仿真模型一階臨界轉速3 830 r/min相比,誤差2%。由此可以證明筆者所建立的模型是合理的。
現場動平衡的具體步驟如下:
(1)測量原始振動,獲得振幅A0和經FFT得到的瞬時相位Φ0;
(2)將A0輸入到算法軟件,經計算得到原始不平衡質量m0;
(3)添加試重m1,測量此時的振動,獲得振幅A1和經FFT得到的瞬時相位Φ1;
(4)將A1輸入到算法軟件,同理得到m01;
(5)經式(14,15)計算和仿真判斷得到原始不平衡m0相對于試重的角度,確定最終配平位置;
(6)添加配重,完成平衡。
實驗過程中,把一個20 g的質量塊放在0°、120°和240°的位置,與原有殘余不平衡量一起作為系統初始不平衡量,共進行3組實驗,均在1 020 r/min下進行,0°為配重盤上指定的零點。按上述步驟進行實驗,實驗中每次先由軟件根據初始振動幅值算出不平衡質量,再以同樣大小的質量塊作為試重進行加重。第一次實驗試重48 g,第二次實驗試重37 g,第三次實驗試重16 g。
記錄動平衡實驗數據如表2所示。

表2 動平衡實驗數據
其中,表2數據為不平衡響應的振幅和瞬時相位,從表2可以看出,隨著加重后系統不平衡量的變化,所測到的信號瞬時相位也會相應的增加或減少。
實驗中試重和配重信息如表3所示。

表3 試重和配重信息
表3數據為配重與試重的大小和加重位置。
第一次實驗時,在平衡前后分別啟車過臨界,轉速升至4 500 r/min,由于過臨界時振幅太大,測點變為軸承旁邊的12節點,此時測得的平衡前后幅值變化圖如圖9所示。
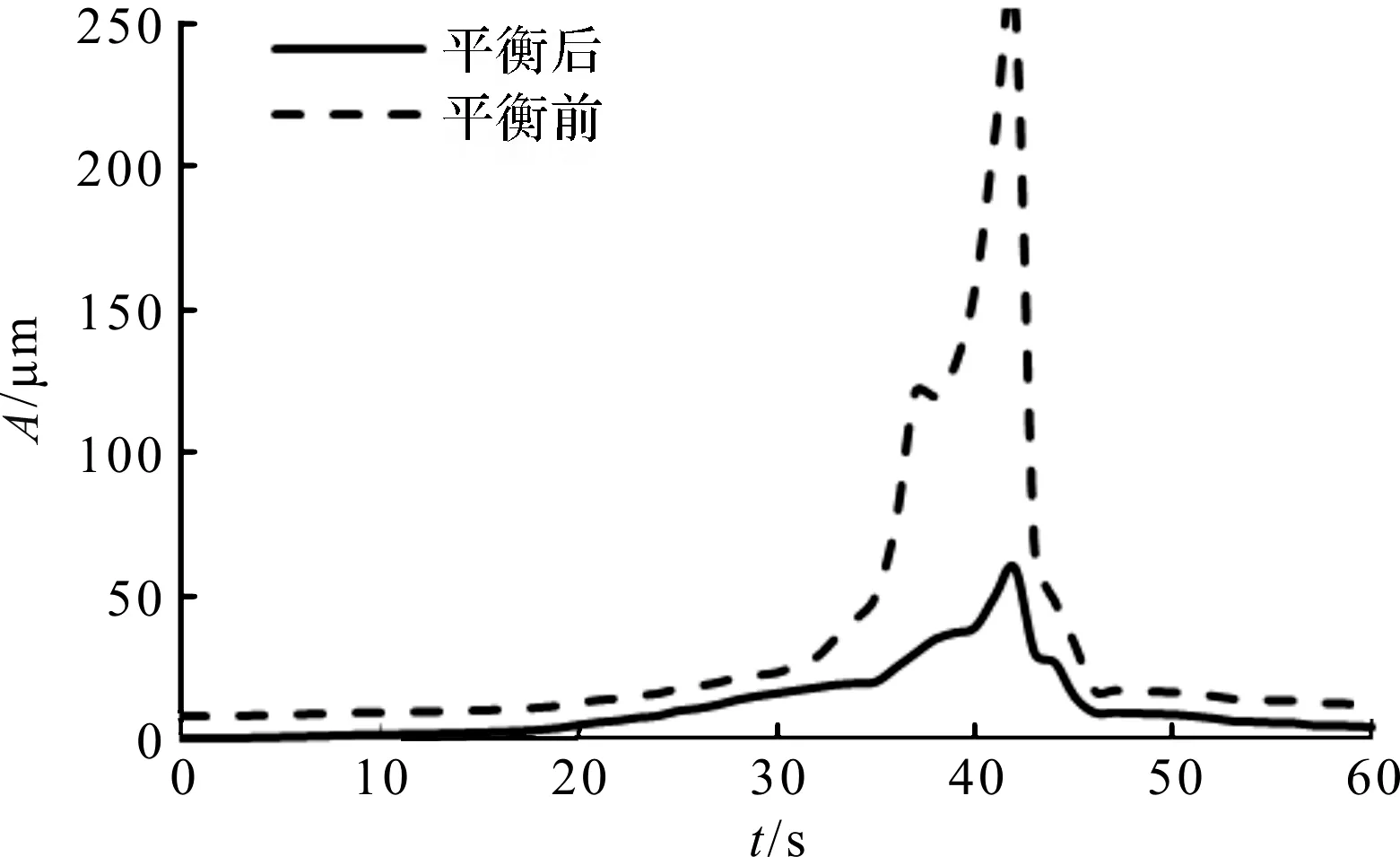
圖9 平衡前后升速過臨界時振動幅值變化圖
從圖9可以看出,轉子的振動明顯降低,特別在臨界轉速附近。由此可以證明所用的配重完全合理,而且只需一次試重就能在無鍵相的情況下完成平衡。
由于在配重盤上只有12個加重孔,實際操作時并不能按理論計算出來的角度加重,一般是就近原則選擇最近的孔位進行配平,即使在這種有誤差的情況下,仍然可以實現高效的動平衡,因此,這種方法具有良好的推廣情景。
5 結束語
針對轉子系統不平衡量引起的振動,本文提出一種基于粒子群優化的無鍵相動平衡方法;通過對轉子系統進行有限元建模,使用實際臨界轉速優化模型,保證仿真模型高度相似于實際轉子;在這種無鍵相的情況下,一次原始振動測量便能得到不平衡量大小,添加試重后再測一次振動,便能確定不平衡量相位;且試重大小均和配重相等,這樣加重時均有一定幾率直接平衡,且能保證非常好的平衡效果;經過仿真和實驗驗證,采用該方法的降振效果可達95%以上。
但該方法需要注意以下幾點:
(1)仿真模型需要與實際轉子相符,需用實測臨界轉速來優化和微調模型,直至誤差在5%的范圍內,且盡可能小,該實驗模型臨界轉速與實測臨界轉速誤差為2%;
(2)該實驗轉子是一個雙支撐單懸臂轉子,一般用實測臨界轉速校準能滿足模型精度要求,若遇到多轉子等復雜結構、工作轉速又過多階臨界的轉子,則除了驗證實際多階臨界轉速外,還要驗證振型,并用實際多測點振動數據反復校準模型,直至誤差到許可范圍;
(3)粒子群算法應注意其收斂性,要選取適當的權值和算法參數,避免陷入局部最優。
總之,該方法內容簡單、易于操作,無需安裝鍵相傳感器,對動平衡的轉子轉速范圍、測點等都沒有特殊限定,可彌補某些旋轉機械中無法測量相位的缺點,有較高的工業應用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
天天愛科學(2020年6期)2020-09-10 07:22:44
中國生殖健康(2019年2期)2019-08-23 08:12:08
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車觀察(2016年3期)2016-02-28 13:16:26
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:44
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
