無人控制系統總體設計綜述
2021-04-23 22:33:03于濤張河寧
專用汽車 2021年10期
于濤 張河寧


關鍵詞:無人控制 遙控操作 自主行駛
1前言
近年來,無人駕駛已經引起社會各方面的關注。作為國家重點發展的無人駕駛產業,無人駕駛技術是發展趨勢。隨著計算機控制技術的發展。自動控制被應用于無人駕駛領域。
2國外發展現狀
20世紀70年代科技發達國家開始率先進行無人駕駛汽車研究。1984年,美國國防高級研究計劃署(DARPA)與陸軍合作,發起自主地面車輛(ALV)計劃。為了推進無人駕駛技術更快、更好地發展。DAPRA于2004~2007年共舉辦了三屆DARPA無人駕駛挑戰賽。20世紀80年代開始,美國著名的大學如卡內基梅隆大學、斯坦福大學、麻省理工學院等都先后加入無人駕駛汽車的研究工作中,直接研發SAE Level4級別的無人駕駛汽車。2016年8月.nuTnomy成為了新加坡第一家在試點項目下推出自動駕駛的出租車公司。
3國內發展現狀
我國汽車制造廠商對無人駕駛汽車的研究與歐美等發達國家和地區相比稍晚.從20世紀80年代末才開始。清華大學在國防科工委和國家863計劃的資助下,從1988年開始研究開發THMR系列智能車。THMR-V智能車能夠實現結構化環境下的車道自動跟蹤。1992年.國防科技大學成功研制出中國第一輛真正意義上的無人駕駛汽車。2011年7月。由一汽集團與國防科技大學共同研制的紅旗HQ3無人駕駛汽車完成286 km的面向高速公路的全程無人駕駛試驗。2012年,軍事交通學院的“軍交猛師III號”以無人駕駛狀態行駛114km.最高速度為105km/h。
4無人控制系統總體設計
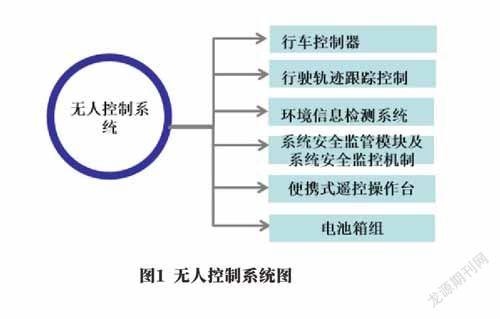
無人控制系統包含行車控制器、行駛軌跡跟蹤控制、環境信息檢測系統、系統安全監管模塊及系統安全監控機制、便攜式遙控操作臺、電池箱組.如圖1所示。行車控制器與環境信息檢測系統集成安裝在車輛上,通過便攜式遙控操作臺.可實現對車輛近距離遙控操作、遠距離遙控操作以及按任務規劃自主行駛等控制模式。
4.1行車控制器
行車控制器采用四核處理器i.MX6。i.MX6處理器基于ARM Cortex A9架構。針對消費電子、工業控制和汽車應用領域設計,含4個ARM。CortexTM-A9內核,運行頻率可達1.2GHz.并帶有1MBL2緩存和64位DDR或2通道、32位LPDDR2支持。這個系列的器件集成FlexCAN、MLB總線、PCI Express。和SATA-2,具有卓越的連接性,同時集成LVDS、MIPI顯示器端口、MIPI攝像機端口和HDMI v1.4.是先進的消費電子、汽車和工業多媒體的理想應用平臺。
行車控制器主板見圖2。除上述技術特征.板上還集成了10/100M以太網口,USB HOST接口,雙路隔離CAN總線接口,RS232接口,RS485接口,HDMI顯示接口以及豐富的IO接口及SPI串行接口。
行車控制器還集成了帶備用電池的RTC.為運行日志文件提供時間基準。
4.2行駛軌跡跟蹤控制
無人駕駛作業時,行車控制器上運行行駛控制軟件,基于車輛行駛狀態反饋信息,實時決策車速與轉向機轉角.從而精確控制車輛行駛軌跡。此控制過程中涉及車輛行駛過程的軌跡跟蹤控制。
車輛的軌跡跟隨控制包含兩部分:一部分是速度跟隨控制,這部分反映的是車輛的縱向動力學控制;另一部分是路徑跟隨控制,它反映的是車輛的側向動力學控制。軌跡跟隨控制的首要目標就是實現對期望路徑與期望速度的跟蹤,本質上反映的就是對車輛運動狀態的控制;其次,在進行軌跡跟隨控制的過程中,還需要確保車輛的穩定性.尤其是在極限工況下的穩定性。
4.3環境信息檢測系統
4.3.1環境信息檢測系統傳感器
為確保自動行駛狀態以及遙控行駛狀態的安全.構建環境信息檢測系統傳感器布置方案。
左前攝像頭和右前攝像頭并列安裝在車體前方,通過雙目視覺算法,并與前向激光雷達數據進行數據融合,測定行駛前方50m距離內的障礙物距離,保證前向行駛安全。
左后激光雷達與右后激光雷達安裝在車體后方,通過交叉設置,可測量車尾半徑20m內的障礙物距離,以保證車輛倒車時的安全。
車體正中上方安裝云臺攝像頭,可遠程遙控,360°旋轉.視頻數據流通過圖傳電臺回傳控制端,用于工作人員遠程監視車輛運行狀態。
車體上還將安裝多模定位單元與電子羅盤,以實現車輛本體的定位。
4.3.2環境信息檢測系統架構
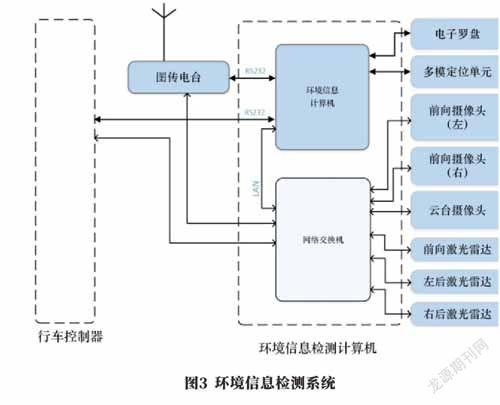
環境信息檢測系統構成見圖3。三路激光雷達與三路攝像頭接入車載網絡交換機。環境信息處理計算機通過局域網訪問各設備.實時讀取數據。環境計算機通過RS232151連接多模定位單元與電子羅盤,實時讀取數據,精確定位車輛。
遠程控制單元通過圖傳電臺連接的車內局域網.可直接連接視頻數據流.或者通過TCP/IP協議與環境計算機交互數據包.實現指令下達與狀態數據回讀。
4.4系統安全監管模塊及系統安全監控機制
系統安全監管模塊將集成獨立的電源轉換芯片、數傳電臺、單片機以及接口電路。系統安全監管模塊可關斷母線電源.可超越行車控制器,為制動控制器提供明確的驅動控制信號。在“遙操控”和“自主行駛”控制模式,系統安全監管模塊作為系統安裝監管的“看門狗”.行車控制器需通過RS232接口定時向本模塊提供喂狗信號,遙控地面站需通過安全監管數傳電臺定時向本模塊提供喂狗信號。任何定時周期內沒有喂狗信號時,系統安全監管模塊判定系統異常,如果車輛正在行駛,本模塊可直接切斷主電源,使驅動電機停轉,同時發出制動指令。
基于電子地圖的作業路徑規劃軟件設計自動行駛時,車輛的行駛軌跡采用離線規劃算法產生,這個過程由一套基于電子地圖的作業路徑規劃軟件(見圖4)來保障。
路徑規劃軟件采用C語言編寫,通過Qt集成開發環境編譯。該軟件通過百度地圖加載電子地圖.既可通過手動制定路徑點的方式來人工規劃作業路徑,又可以通過設定電子圍欄設定約束條件,自動規劃作業路徑。圖5為人工規劃作業路徑的示意圖。
路徑規劃軟件產生的路徑文件可以拷貝到行車控制系統后,車輛即可依據該文件讀取路徑點,自動行駛。
4.5便攜式遙控操作臺
便攜式遙控操作臺作為控制設備輔助操作模式.主要用于接收車輛測與控制系統的參數及各項數據.并對整車進行過程監控和控制。操作臺包含面板按鈕、指示燈、操作搖桿、數傳電臺、NanoPi2嵌入式計算機以及狀態顯示屏、鋰電池組及電源管理電路等主要部件。
該遙控操作臺提供了車輛本體以及環境感知設備的遙操作控制界面以及狀態信息顯示界面。通過組合搖桿以及操作按鈕,一個人即可通過圖像反饋,遙控操作車輛行駛、轉向、變速。
便攜式遙控操作臺具有參數顯示、過程監控和遠程控制等功能.主要由遠程過程監控和遠程控制組成。通過車載攝像頭和激光雷達等設備對周圍環境進行感知,通過4G網絡或無線電臺接收器傳輸到便攜式遙控操作臺。
4.6電池箱組
電池箱組通過對比儲能電池的性能、用途、能量密度、正極材料選擇。電池箱組選用鋰電池箱組。其優勢為:質量比能量高、體積比能量高、功率密度高、電壓平臺較高。
充放電方式:電池組先串聯后并聯.電池組需同時充電或放電。保證電池壽命的一致性。
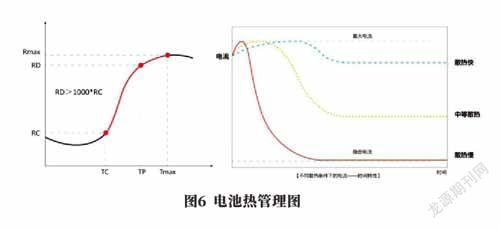
溫控管理系統采用PTC加熱方式見圖6.PTC全稱為正溫度系數熱敏電阻材料,分為聚合物PTC和陶瓷PTc兩種,本方案采用陶瓷PTC。
PTC特性:隨著溫度的上升,自身導通電阻持續增加,從而實現自限溫及熱平衡。散熱越快.PTC發熱組件達到熱平衡的時間越長.維持電流越大。
5結語
無人控制系統技術將是未來發展方向。隨著無人技術的成熟,它將發揮更加安全、可靠、高效的作用,其發展空間更廣闊。