
一種柔索驅動超冗余度機器人結構及驅動機構設計
2021-04-23 01:40:40趙東捷杜兆才劉李明
裝備制造技術 2021年12期
趙東捷,杜兆才,劉李明
(中國航空制造技術研究院,北京 100024)
0 引言
飛機裝配的進氣道內腔的裝配質量直接影響飛機的安全性、疲勞壽命以及穩定性[1]。而復雜狹窄內腔存在環境復雜、狹窄作業空間受限等特點,一般機構的工作空間難以滿足要求[2]。
針對新一代戰機的進氣道等復雜狹窄內腔的檢測要求,本研究提出一套蛇形臂機器人檢測統,并進行了實驗驗證,驗證了理論推導的正確性。系統由蛇形臂機器人搭載末端檢測單元構成。
1 結構設計
針對新一代戰機的進氣道工作空間狹窄且存在干涉的問題,擬采用大長徑比冗余度柔索驅動機器人(后文簡稱蛇形臂)搭載末端檢測單元進入工作空間進行檢測。蛇形臂選取虎克鉸關節串聯組成機器人本體,這種構型具有足夠的自由度且足夠靈活,符合在狹小工作空間約束下檢測工作的需求。針對具體的檢測路徑需求以及空間干涉的約束,對蛇形臂進行機構設計,使其可達工作空間能夠覆蓋檢測路徑。控制方面設計陣列式高精度柔索驅動結構,節約空間的同時對機器人本體進行高效驅動[3]。
1.1 大長徑比冗余度柔索驅動機器人機械結構設計
選取虎克鉸關節串聯組成柔索機器人本體構型,采用柔索驅動作為機器人的驅動形式。采用全驅動的模式提高穩定性和定位精度,最終形成用于狹小空間作業的大長徑比冗余度柔索驅動機器人[4]。
蛇形臂由6 節段組成,節與節之間采用虎克鉸串聯,每節采用3 根鋼絲繩控制,總長度1293 mm(不算末端視覺單元),每節長210 mm,每節外圓直徑為60 mm。整體結構如圖1 所示。
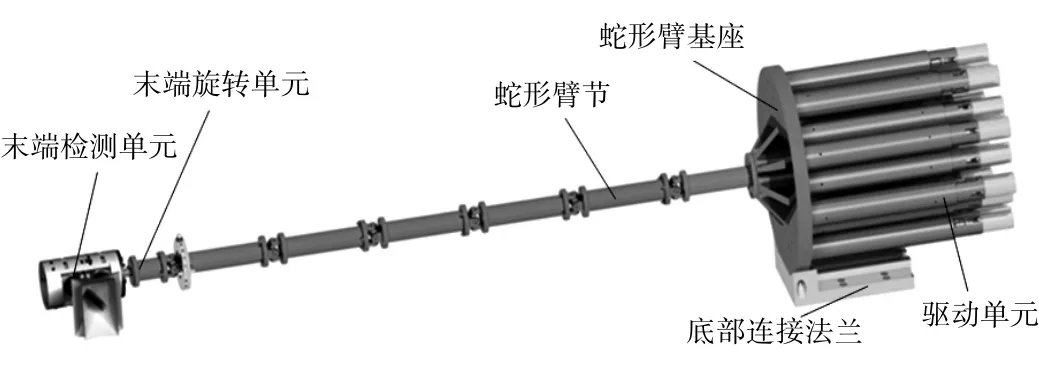
圖1 蛇形臂整體結構
各單元具體設計:
驅動單元:驅動單元包括驅動器和鋼絲繩兩部分,鋼絲繩連接在本體單元上,如圖2 所示,主要用于控制本體單元運動。本體單元之間通過虎克鉸連接。
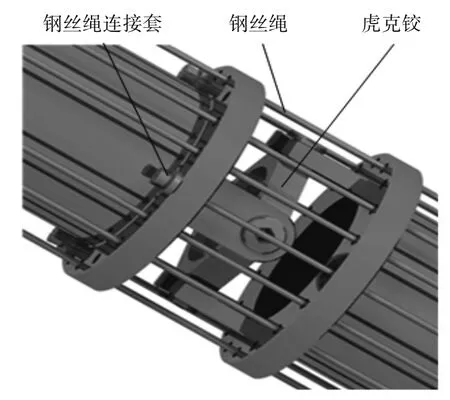
圖2 鋼絲繩和虎克鉸
驅動器集成安裝在底座,分別通過絲杠拉動對應的鋼絲繩對每個節進行驅動,每根繩索對應一個電機減速器,總共需要18 個電機減速器。把電機減速器絲杠集成到一起,通過圓筒體外壁導向,由絲杠螺母拉伸鋼絲繩控制臂節,具體結構如圖3 所示。
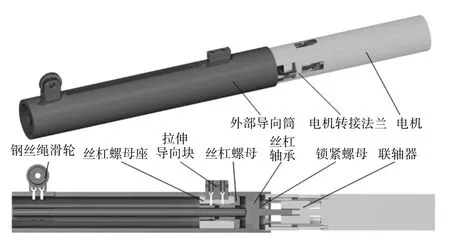
圖3 驅動單元
本體單元:蛇形臂的主要組成部分,由蛇形臂節和虎克鉸組成,一共6 節,每一節由虎克鉸約束,由3根鋼絲繩控制臂節,如圖4 所示。
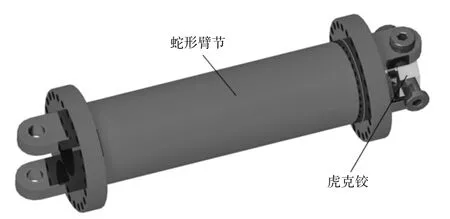
圖4 本體單元
末端旋轉單元:末端旋轉單元采用類似蛇形臂節的結構,末端通過虎克鉸與前端蛇形臂連接,中間安裝電機,電機軸直接與末端檢測單元連接,結構如圖5 所示。
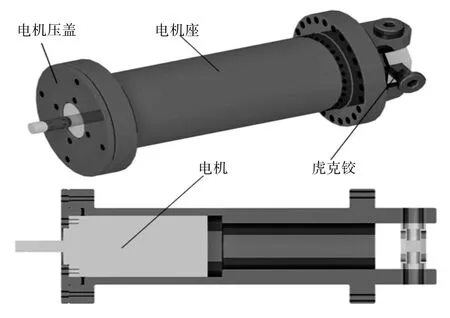
圖5 末端旋轉單元
1.2 大長徑比冗余度柔索驅動機器人驅動方案設計
蛇形臂主要依靠鋼絲繩的拉力克服本體重力和末端的重力來驅動,工作場景中蛇形臂的一種典型實際受力情況如圖6 所示,以基座中心為坐標原點建立右手坐標系,其中F為末端載荷對蛇形臂末端的作用力,點N為末端載荷重心,點Oi為第i節始端的虎克鉸的中心點,H為單個節重心到拉力作用點的水平方向距離,Lj為末端載荷重心到第j節虎克鉸的距離,Gi為蛇形臂第i節的重力,點Mi為蛇形臂第i節的重心,Fi為第i節受到的拉力,Lki為蛇形臂第i節重心到第k節虎克鉸的距離,為簡化計算過程,暫時忽略摩擦力(后期采用安全系數補償),需滿足力矩平衡蛇形臂本體才能保持穩定。以當前姿態下對第一節前面的虎克鉸中心點O1的力矩平衡為約束條件進行計算,設第i節的3 根牽引柔索布設位置如圖7 所示,點為柔索作用端面轉軸中心,點為第i節穿第j個柔索的孔中心,則第i節第j根柔索作用點的坐標值為,其中Ri為穿柔索的孔中心到端面轉軸中心的距離為穿柔索的孔中心與端面轉軸中心連線與軸的夾角。則表達柔索位置的矢量,設第i節第j根柔索作用力矢量為。根據力矩平衡方程有式(1)。

圖6 蛇形臂受力情況

圖7 第i 節的牽引柔索布置位置

一般地,對第n個虎克鉸中心點有力矩平衡方程:

為了方便計算,對各個柔索的位置進行參數化,以虎克鉸的十字軸線X軸和Y軸建立坐標系,Y軸與重力反方向,如圖8 所示,采用命名對應位置的柔索,a表示不同關節的柔索編號,b表示同一關節的不同柔索編號,采用坐標的方式表示拉力作用的位置,如圖8 所示。由于主要克服重力矩,因此,上半平面必須存在驅動點,且理論上鋼絲繩越靠近上方所需的驅動力越小。但是考慮到鋼絲繩只能提供拉力,如果驅動點均在上半平面,則系統下移完全靠自身重力,沒有可控的驅動力,因此,為了保證整體的穩定性,下半平面也設置驅動點,且保證3 個驅動點位于3 個不同象限以提高驅動的穩定性。設置拉力點為圖中所示模型外周圓的圓心,選用等邊三角形布置方法設置每一節上的拉力點,按照順時針方向命名各點受力,根據設計模型的實際尺寸給各個鋼絲繩拉力點標注位置坐標。
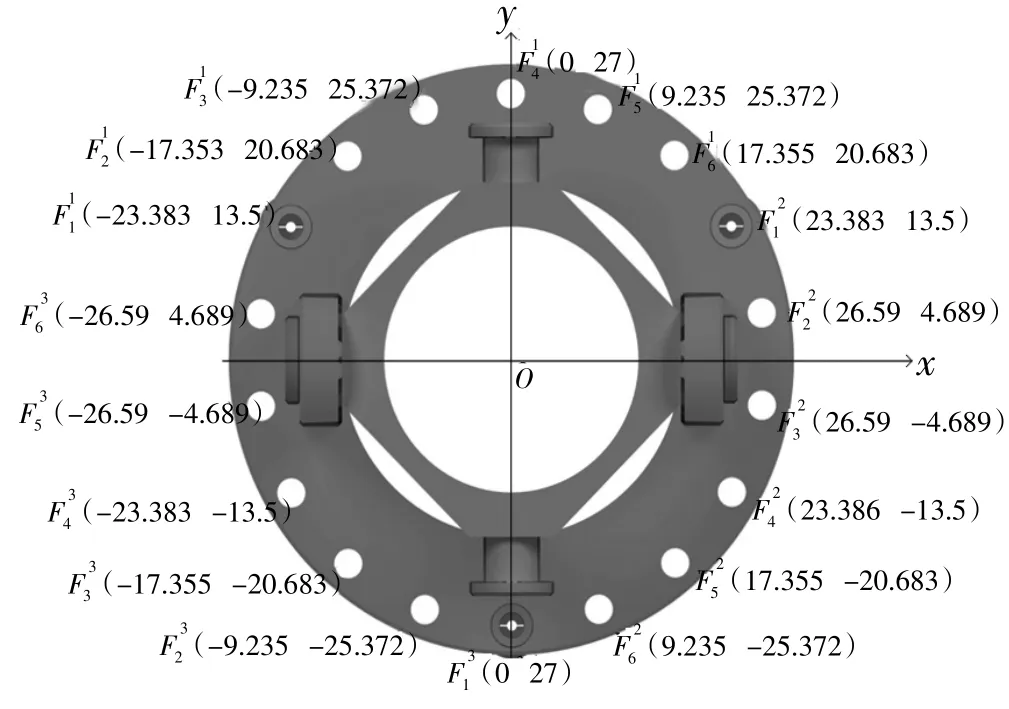
圖8 鋼絲繩坐標系(坐標值為拉力作用位置坐標)
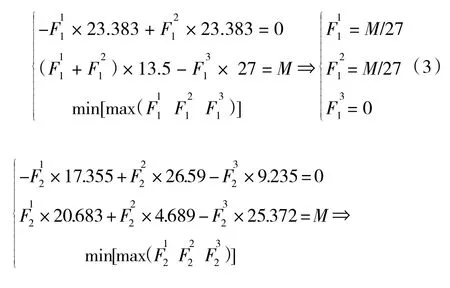
以單個關節對其前面的虎克鉸力矩平衡求解,根據式(2),按照X、Y方向進行正交分解,設單個關節除柔索拉力力矩以外的合力矩為M(M00),以單個關節3 根鋼絲繩中的最大拉力取得最小值為約束條件,對每一組受力進行計算:
由對稱性原理可得:F5,F6拉力與F3,F2相同,分析上述結果有:

由于越遠離基座的關節M值越小,因此,拉力組的最大拉力值越小,應分配在越靠近基座的位置,因此從基座到末端鋼絲繩對應的拉力組排序為:F1,F4,F2,F6,F3,F5。
對于當前虎克鉸,當其后面的蛇形臂節段呈水平姿態時,阻力具有最大力臂,此時鋼絲繩拉力達到最大值(忽略由于轉角產生的動力臂的微小變化,后面采用安全系數修正),前文已對蛇形臂水平姿態下第一節的拉力進行計算見式(1),代入各項參數計算得

由于第一節采用F1作為拉力組,根據式(4),有
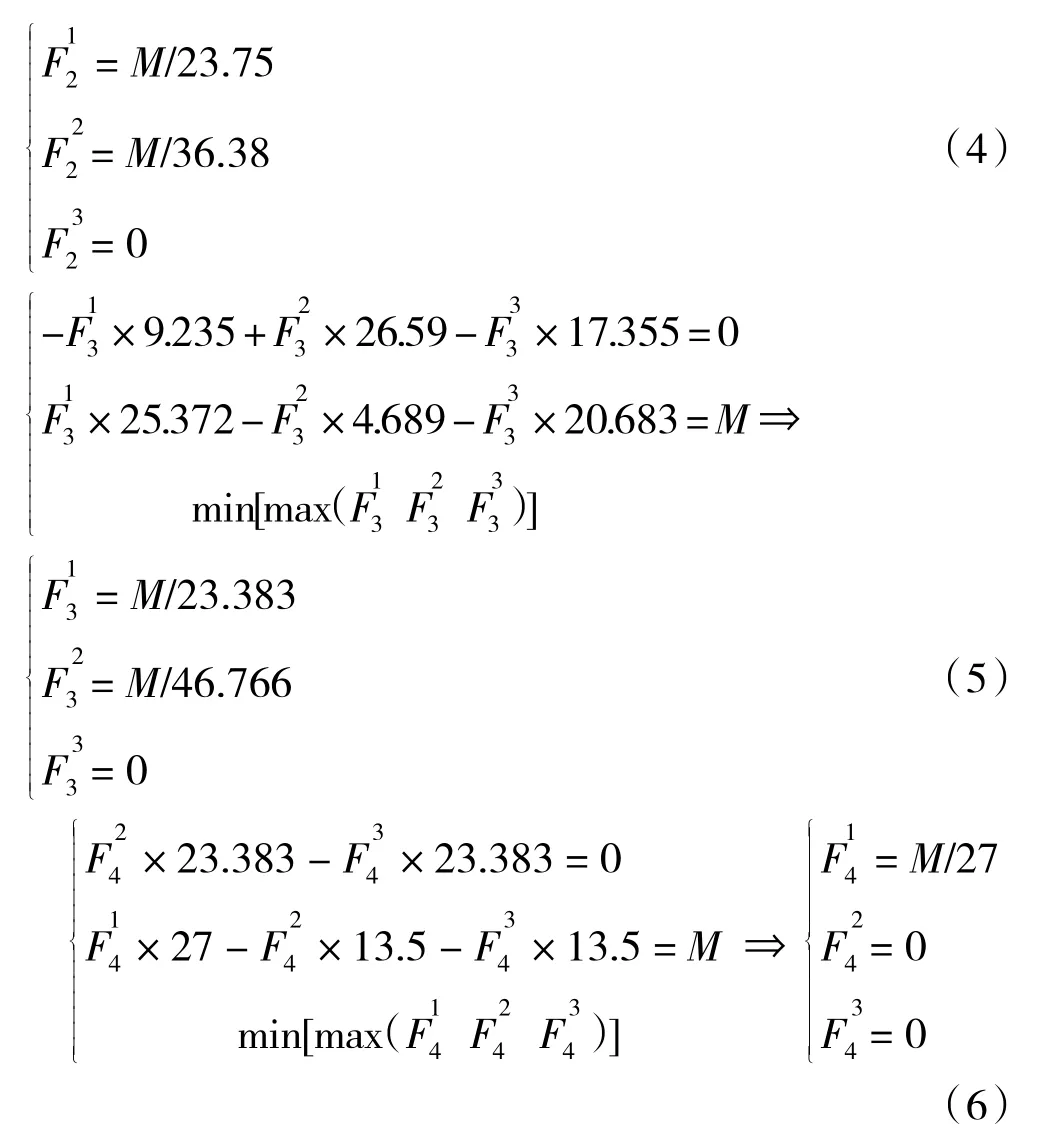
對于蛇形臂第二節,采用F4作為拉力組,F4組中最大拉力和F1組相同,根據式(6),有
可見第二節所需拉力是小于第一節的。
對于蛇形臂第三節,采用F2作為拉力組,代入實際參數計算,有:

由式(4)計算,有
可見,第三節拉力小于第一節,以此推算后續拉力均小于第一節拉力。
以第一節的最大拉力1500 N 來對絲杠選型,同時,計算電機減速器所需參數,制定相應方案。
計算絲杠行程:假設在理想狀態下每個關節形成轉角為θ,單個關節旋轉前和旋轉后如圖9 所示。

圖9 關節狀態示意圖
由幾何關系可得以下等式:
設關節轉動了角度θ。由余弦定理可以計算出:繩纜的外弦長為L1,繩纜的內弦長為L2,二者的關系為:

假設每個關節能夠同時彎曲,且彎曲角度相同。關節總數為n,則鋼絲繩長度的最大差值為:

因此,絲杠行程應為:

引入實際數據:
因此滾珠絲杠行程長度為150 mm。
2 實驗驗證
2.1 機器人檢測系統實驗設計
本研究主要測試大長徑比冗余度柔索驅動蛇形臂的狹小空間運動軌跡,根據軌跡規劃軟件生成的軌跡控制蛇形臂穿越試驗臺中的模擬孔,驗證軌跡規劃能力。具體實驗條件見圖10、圖11。

圖10 復雜狹窄內腔裝配質量機器人智能檢測系統

圖11 模擬工作環境試驗臺
2.2 機器人檢測系統軌跡參數計算
根據軌跡理論,采用Matlab Robotics Toolbox 求解。這里選取大長徑比冗余度柔索驅動機器人的初始狀態和檢驗狀態進行驗證。基于5 次多項式軌跡,得到超冗余度機器人運動軌跡(圖12),運用雅克比矩陣偽逆求的超冗余度機器人的逆解,再進一步得到各關節角度變化,角速度變化、角加速度變化(圖13~圖15)。
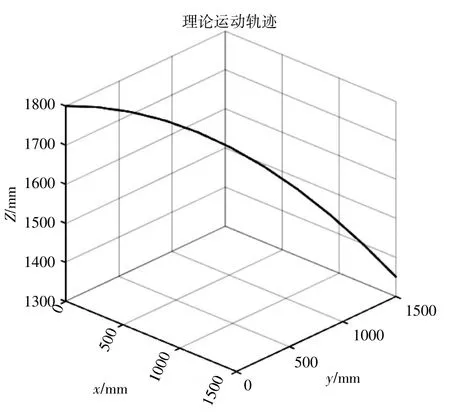
圖12 線曲跡軌器行執端末
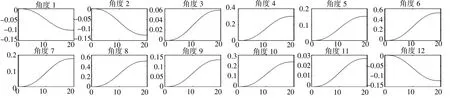
圖13 各關節角度變化曲線
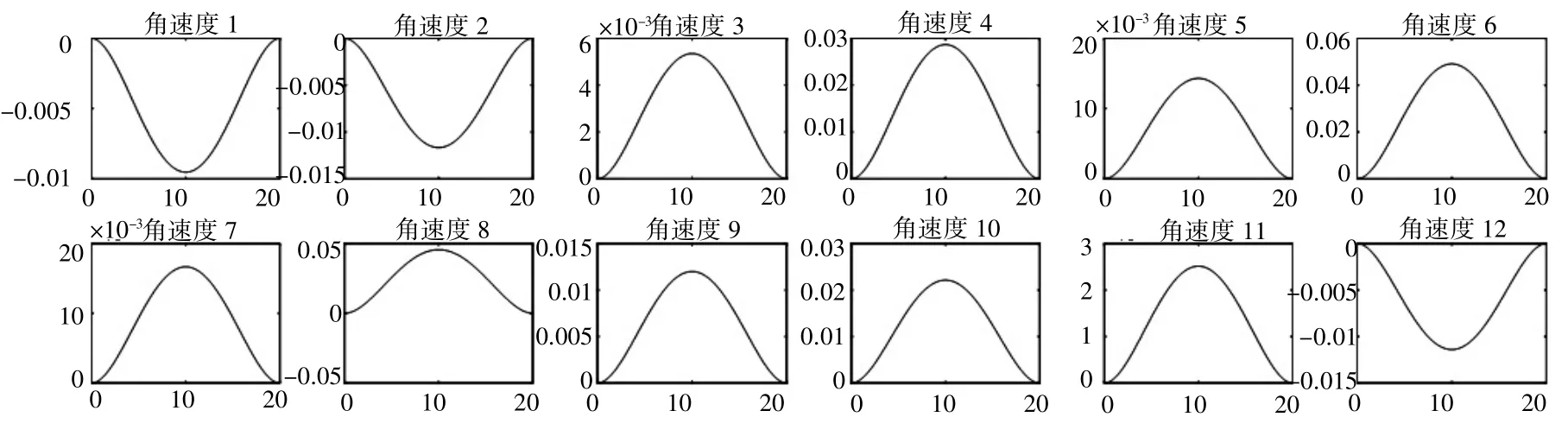
圖14 各關節角速度變化曲線
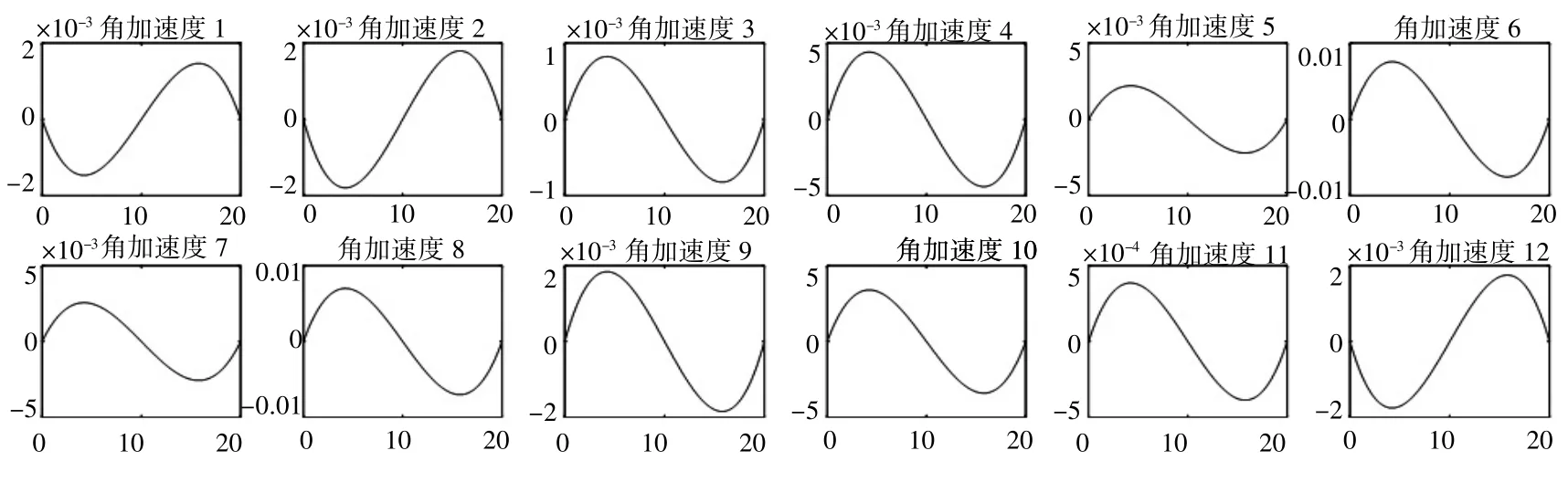
圖15 各關節角加速度變化曲線
2.3 機器人檢測系統實驗結果
采用前文1.2 中的計算的大長徑比冗余度柔索驅動機器人軌跡驅動參數對蛇形臂進行驅動,最終運動到如圖16 所示,采用激光跟蹤儀測量實際運動過程中末端到達的點位,此處采集11 個點,點坐標見表1。通過采集點通過3 次樣條插值方法擬合蛇形臂末端在當前驅動參數下的實際運動軌跡,將實際運動軌跡與理論運動軌跡進行對比,分別計算每個實際采集點到理論曲線的最小距離,結果見表1。分析表1 可知,隨著運動軌跡的延長,實際軌跡與理論軌跡的偏差越來越大,最大偏差為6.7 mm。采用Matlab 繪制理論軌跡曲線和實際軌跡曲線,如圖17 所示,根據圖中曲線分析以及表1 中結果可知末端運動路徑與理論軌跡曲線基本吻合。此誤差將通過激光跟蹤儀標定進行修正。

圖16 狹窄內腔裝配質量機器人智能檢測系統測試狀態
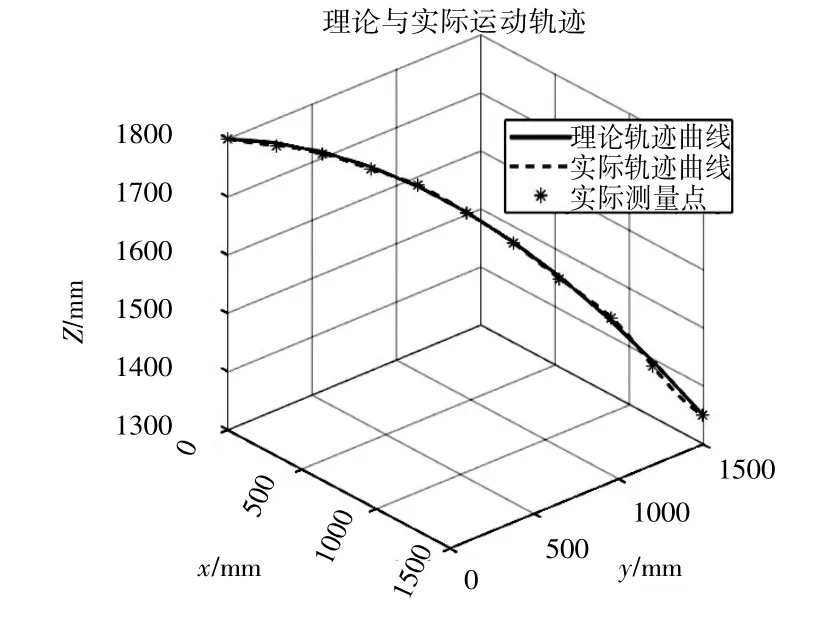
圖17 狹窄內腔裝配質量機器人理論運動軌跡與實際軌跡對比

表1 實際點位參數及偏差距離
3 結束語
本研究針對新一代戰機的進氣道等復雜狹窄內腔工作環境提出了一套蛇形臂機器人檢測系統,通過蛇形臂機器人搭載末端檢測單元實現在狹小空間的工作,從應用領域來講,本系統克服了對于狹窄內腔人工難以工作的困難,同時,通過對機器人本體結構和控制算法的優化,提升了機器人的運動精度,進而提升了新一代戰機復雜狹窄內腔裝配質量檢測精度及效率。
