高旋掠飛彈載激光雷達(dá)稀疏點(diǎn)云插值算法
2021-04-24 08:32:52蔣罕寒武軍安
彈箭與制導(dǎo)學(xué)報(bào) 2021年1期
蔣罕寒,郭 銳,武軍安,趙 旭
(1 南京理工大學(xué)智能彈藥技術(shù)國(guó)防重點(diǎn)學(xué)科實(shí)驗(yàn)室,南京 210094;2 北京信息科技大學(xué)高動(dòng)態(tài)導(dǎo)航技術(shù)北京市重點(diǎn)實(shí)驗(yàn)室,北京 100101)
0 引言
高旋掠飛彈高轉(zhuǎn)速、大掃描半徑的特點(diǎn)導(dǎo)致彈載激光雷達(dá)獲取的點(diǎn)云稀疏、密度低。為了獲取其準(zhǔn)確三維距離像,需要對(duì)采集到的點(diǎn)云數(shù)據(jù)進(jìn)行重構(gòu)。
羅立彥研究了一種利用曲線曲面的細(xì)分插值技術(shù)直接進(jìn)行圖像插值的算法,該算法由離散到離散,無(wú)須建立中間連續(xù)插值模型[1];徐巍等討論了距離倒數(shù)加權(quán)法、最近點(diǎn)插值法、移動(dòng)平均值法、局部多項(xiàng)式法的插值方法特點(diǎn)[2];李忠等討論了基于稀疏點(diǎn)的三維模擬插值算法,利用三階二次B-樣條插值函數(shù)構(gòu)造了一種新的插值算法[3];繆君等利用分層抽樣代替隨機(jī)抽樣,用改進(jìn)的J-Linkage多模型估計(jì)算法對(duì)稀疏點(diǎn)云進(jìn)行多平面擬合,獲得場(chǎng)景的多平面模型[4];刁鑫鵬等運(yùn)用 Kriging 算法的無(wú)偏、方差最小等優(yōu)點(diǎn),提出一種新的變異函數(shù)參數(shù)估計(jì)方法,并與曲面擬合法結(jié)合,對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行插值[5]。焦嵩鳴等提出一種基于距離反比插值的貪婪三角化算法對(duì)三維點(diǎn)云進(jìn)行重建[6]。
借鑒上述算法,文中提出了一種區(qū)分邊緣點(diǎn)與非邊緣點(diǎn)的分類插值重構(gòu)算法,通過(guò)稀疏點(diǎn)云得到了較好的目標(biāo)三維距離像。
1 插值算法應(yīng)用背景與分析
高旋掠飛彈藥高速旋轉(zhuǎn),單元激光雷達(dá)探測(cè)時(shí)會(huì)多次掃過(guò)目標(biāo),進(jìn)而獲取目標(biāo)的三維距離像信息。每個(gè)采樣周期內(nèi)可以獲取一條掃描線數(shù)據(jù)。基于公式(1)將點(diǎn)云數(shù)據(jù)轉(zhuǎn)化為以彈體質(zhì)心為原點(diǎn)的三維點(diǎn)云數(shù)據(jù),如圖1所示。
(1)
式中:i=1~n;ρ為探測(cè)距離值;θ為單元激光雷達(dá)安裝在高旋掠飛彈藥上的斜置角;τ為高旋掠飛彈藥單位采樣時(shí)間內(nèi)轉(zhuǎn)動(dòng)的角度;v為穩(wěn)態(tài)掃描時(shí)彈藥飛行存速;tmin為最小單位采樣時(shí)間;loc為彈丸質(zhì)心到激光發(fā)射點(diǎn)的距離;H為彈丸飛行時(shí)的高度。
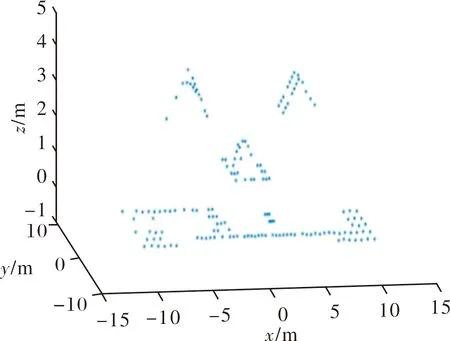
圖1 三維點(diǎn)云數(shù)據(jù)圖
彈載激光雷達(dá)稀疏點(diǎn)云插值與傳統(tǒng)的圖像插值存在較大的區(qū)別。圖2是稀疏點(diǎn)云插值與傳統(tǒng)圖像插值的對(duì)比圖。
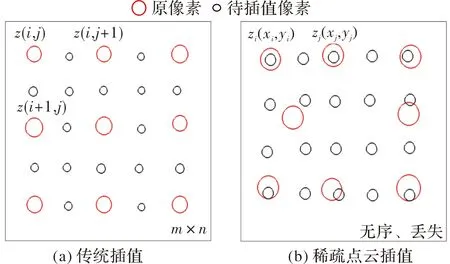
圖2 傳統(tǒng)圖像插值與稀疏點(diǎn)云插值區(qū)別
圖像數(shù)據(jù)為m×n的矩陣,有序?qū)ΨQ,可以基于下標(biāo)訪問(wèn)鄰近像素;距離像數(shù)據(jù)由3個(gè)向量保存x,y,z軸的數(shù)據(jù),無(wú)序且存在丟點(diǎn)問(wèn)題。三維距離像的目標(biāo)提取算法多依靠物體邊緣梯度差信息[7-8],然而圖像插值算法往往會(huì)模糊邊緣信息,從而不適用于激光雷達(dá)稀疏點(diǎn)云插值。
2 算法具體流程
文中所述的稀疏點(diǎn)云插值算法流程如圖3所示。
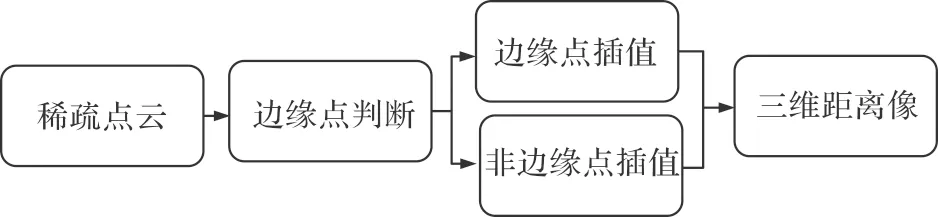
圖3 算法流程圖
2.1 區(qū)分邊緣點(diǎn)與非邊緣點(diǎn)
基于待插值點(diǎn)的鄰域點(diǎn)集起伏程度對(duì)待插值點(diǎn)作分類判斷。相鄰兩點(diǎn)在xoy平面上最大距離是一個(gè)采樣時(shí)間內(nèi)彈丸轉(zhuǎn)動(dòng)一定角度對(duì)應(yīng)的弧線在地面上的投影。
dmax=H·tan(wtmin)
(2)
式中:w為彈丸穩(wěn)態(tài)掃描的轉(zhuǎn)速。
先搜尋待插值點(diǎn)g的鄰域點(diǎn),即
d=sqrt((xg-xi)2+(yg-yi)2)
(3)
若滿足
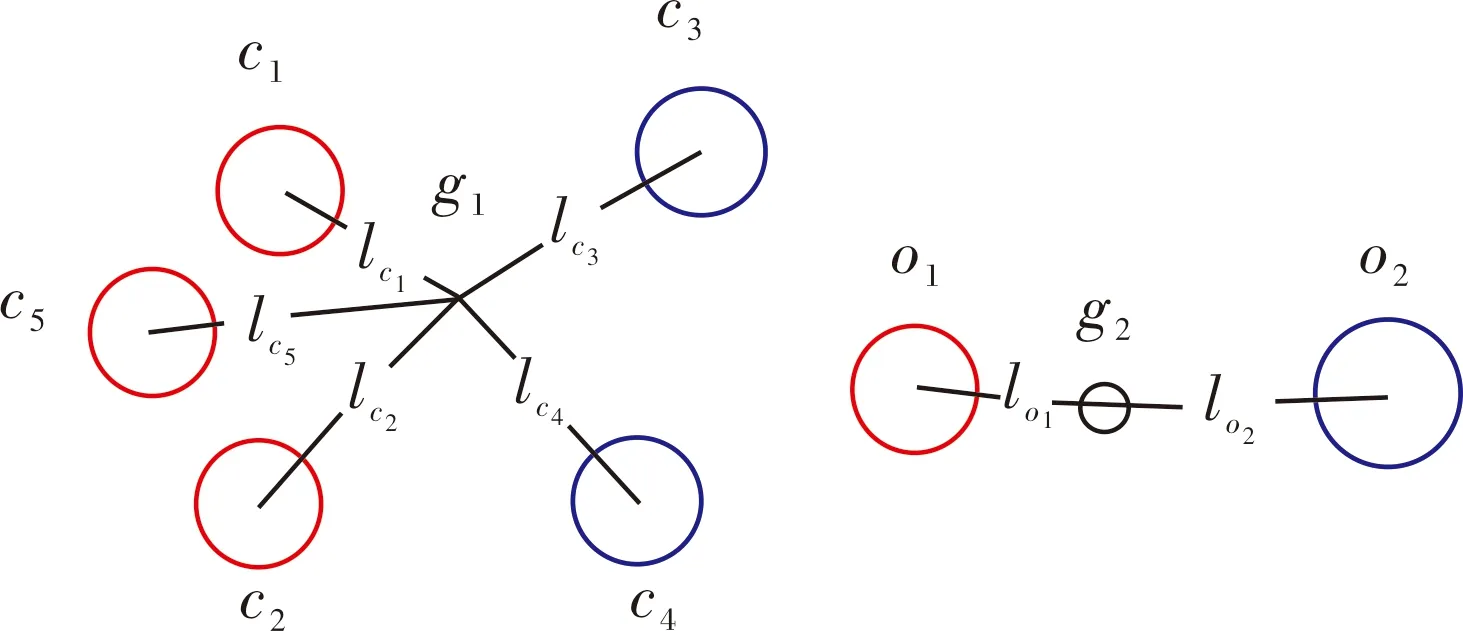
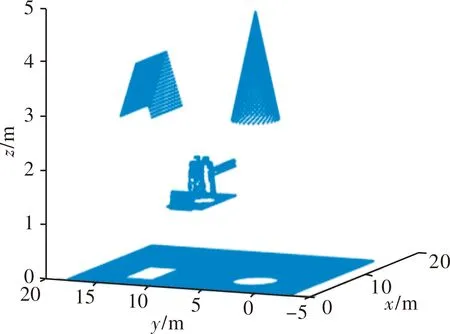
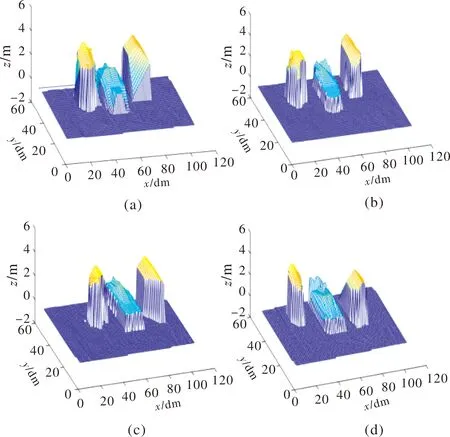
d (4) 則點(diǎn)i屬于點(diǎn)g鄰域點(diǎn)。查找鄰域點(diǎn)時(shí)從當(dāng)前待插值點(diǎn)的兩端開(kāi)始查找,可以顯著提高運(yùn)算速度。圖4中的r1,r2,r3,r4是g1點(diǎn)的鄰域點(diǎn);c1,c2,c3,c4是g2點(diǎn)的鄰域點(diǎn);v1,v2是g3點(diǎn)的鄰域點(diǎn);o1,o2是g4點(diǎn)的鄰域點(diǎn)。 圖4 邊緣劃分示意圖 接著計(jì)算其鄰域點(diǎn)集的最大高度差zmax。 zmax=max(z(xi,yi)-z(xj,yj)) (5) 式中:i,j=1~n,i≠j,n為當(dāng)前待插值點(diǎn)的鄰域點(diǎn)數(shù)。 將zmax與預(yù)先設(shè)定的同一物體相鄰兩點(diǎn)高度閾值z(mì)ε比較。若滿足 zmax>zε (6) 則當(dāng)前待插值點(diǎn)為邊緣點(diǎn)。反之,則為非邊緣點(diǎn)。圖5中g(shù)1,g3為非邊緣點(diǎn),g2,g4為邊緣點(diǎn)。 邊緣點(diǎn)鄰域點(diǎn)集起伏較大,通過(guò)鄰域點(diǎn)集的所有數(shù)據(jù)對(duì)待插值點(diǎn)估值會(huì)平滑掉原有的距離像邊緣細(xì)節(jié),因此對(duì)邊緣點(diǎn)采用改進(jìn)的最近鄰插值算法進(jìn)行插值。先取鄰域點(diǎn)集σ中任意一點(diǎn)q歸于σ1點(diǎn)集,將滿足式(7)的點(diǎn)歸于σ1點(diǎn)集,不滿足的點(diǎn)歸于σ2點(diǎn)集。 max(z(xq,yq)-z(xj,yj)) (7) 式中:j=1~n,j≠q。若滿足 N(σ1)≠N(σ2) (8) 其中:N(σ1),N(σ2)分別為σ1,σ2集合點(diǎn)的個(gè)數(shù)。則取點(diǎn)數(shù)多的集合,計(jì)算待插值點(diǎn)到待插值點(diǎn)的距離最小的點(diǎn)。 zg=z(xi,yi) (9) 式中:xi,yi是集合點(diǎn)數(shù)多的集合中的一點(diǎn),使得d最小。i∈(N(σ1)>N(σ2))取σ1,否則取σ2。 若式(8)不成立,則直接從σ中選擇距離待插值點(diǎn)最近的點(diǎn)的高度值來(lái)給待插值點(diǎn)賦值,即i∈σ。如圖5所示,g1點(diǎn)的值由c1決定;g2點(diǎn)的值由o1決定。 圖5 邊緣點(diǎn)插值示意圖 最近鄰插值算法會(huì)產(chǎn)生明顯的鋸狀,數(shù)據(jù)不夠光滑。因此對(duì)非邊緣點(diǎn)采用鄰域點(diǎn)集反距離加權(quán)求和的插值算法進(jìn)行插值,如圖6所示。 先計(jì)算其鄰域點(diǎn)到待插值點(diǎn)的距離 li=sqrt((xg-xi)2+(yg-yi)2) (10) 其中:i=1~n。 計(jì)算鄰域點(diǎn)到待插值點(diǎn)的距離之和l: l=∑li,i=1~n (11) 計(jì)算鄰域點(diǎn)距離權(quán)重的倒數(shù)之和α: (12) 計(jì)算各鄰域點(diǎn)對(duì)當(dāng)前插值點(diǎn)的影響因子β: (13) 最后通過(guò)鄰域點(diǎn)的高度值獲取待插值點(diǎn)的估值z(mì)g: zg=∑ziβi,i=1~n (14) 為了驗(yàn)證算法的可行性,用MATLAB構(gòu)建如圖7所示的目標(biāo)、障礙物及地面點(diǎn)云圖。可以用MATLAB結(jié)合高旋掠飛彈藥運(yùn)動(dòng)學(xué)方程及穩(wěn)態(tài)掃描運(yùn)動(dòng)方程仿真得到如圖7所示的點(diǎn)云圖。 圖7 三維點(diǎn)云數(shù)據(jù)仿真圖 圖8是應(yīng)用文中算法對(duì)不同速度和轉(zhuǎn)速下的稀疏點(diǎn)云插值后得到的三維距離像。可以看出:雖然得到的三維距離像邊緣存在瑕疵,但是裝甲目標(biāo)與障礙物被有效分離,且較好的保留了邊緣細(xì)節(jié)信息,失真程度較小。 圖8 三維距離像 圖9 三維距離像 圖9是應(yīng)用MATLAB中g(shù)riddata函數(shù)自帶的線性插補(bǔ)法(linear)、三次插補(bǔ)法(cubic)、“V4”插補(bǔ)法、最近鄰插補(bǔ)法(nearest)處理后的效果圖。可以看出:目標(biāo)與障礙物被連接,且邊緣過(guò)度平滑,丟失了原有的細(xì)節(jié)信息。 文中進(jìn)行了高旋掠飛彈藥彈載激光雷達(dá)稀疏點(diǎn)云插值算法研究。通過(guò)新算法對(duì)仿真得到的高旋掠飛彈藥彈載激光雷達(dá)稀疏點(diǎn)云數(shù)據(jù)進(jìn)行處理,與現(xiàn)有方法相比,新算法在有效插值的同時(shí),能更好地對(duì)距離像邊緣細(xì)節(jié)信息進(jìn)行保護(hù),同時(shí)滿足彈載計(jì)算機(jī)運(yùn)行速度的要求。下一步將獲取靶場(chǎng)實(shí)測(cè)數(shù)據(jù)作進(jìn)一步的驗(yàn)證。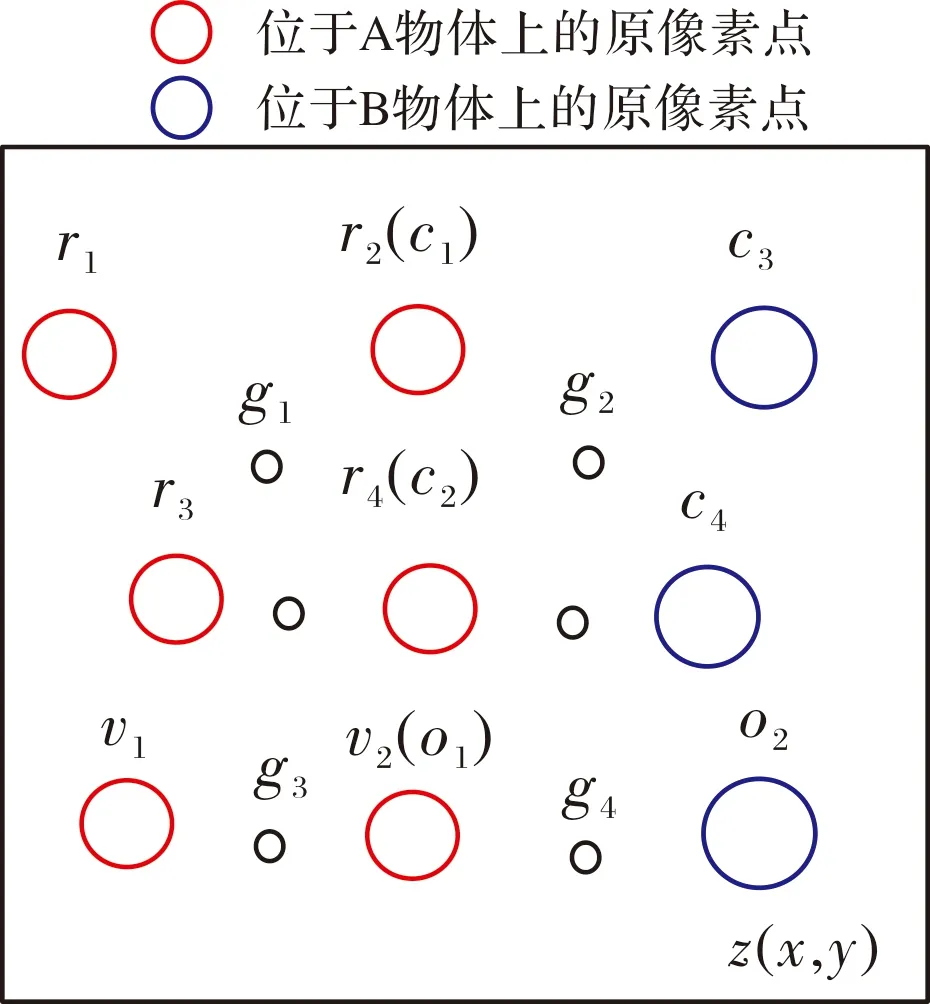
2.2 邊緣點(diǎn)插值
2.3 非邊緣點(diǎn)插值
3 算法效果與對(duì)比分析

4 結(jié)論
