異構作動系統的效率特性與能量管理分析
2021-04-26 06:54:48周國峰韓文博李迎博劉珺怡
導彈與航天運載技術 2021年2期
胡 驍,周國峰,韓文博,李迎博,劉珺怡
(中國運載火箭技術研究院,北京,100076)
0 引 言
隨著飛行器對可靠性和經濟性的要求日益提高,異構作動系統得到越來越多的應用,該系統由一個液壓作動器(Hydraulic Actuator,HA)和一個電動靜液作動器(Electro-hydrostatic Actuator,EHA)構成。由于該作動系統中液壓作動器和電動靜液作動器具有不同的輸入能源和不同的工作原理,導致效率特性不同。因此,亟需針對該作動系統,對效率特性與給定工況的對應關系開展研究,提出適宜的能量管理策略。
1 異構作動系統的基本組成
異構作動系統示意如圖1所示[1~6]。HA主要由恒壓源、控制器、伺服閥和液壓缸組成[7]。恒壓源為HA提供液壓動力。控制器的輸入信號為位移指令信號和位移反饋信號,通過控制算法,輸出伺服閥的控制電流信號,調節伺服閥的閥開口,進而調節通過伺服閥的流量。液壓缸與伺服閥相連,將凈流量轉化為壓力的變化量,驅動舵面完成指定的工作,見圖2。

圖1 異構作動系統示意 Fig.1 Schematic of Dissimilar Redundancy Actuation System
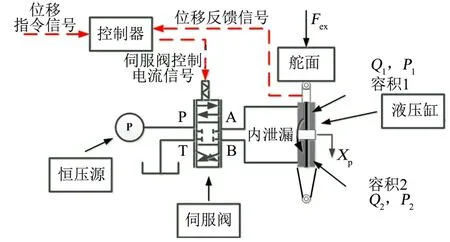
圖2 HA原理示意 Fig.2 Schematic Diagram of HA
EHA由電機、液壓泵、液壓缸和電控單元組成[8],見圖3。輸入信號與各反饋信號在控制器里按控制律進行計算后轉變為電控信號,經驅動電路放大為功率電信號,由功率電信號驅動的電機帶動液壓泵旋轉,最終由液壓泵輸出的壓力油驅動舵面進行工作。
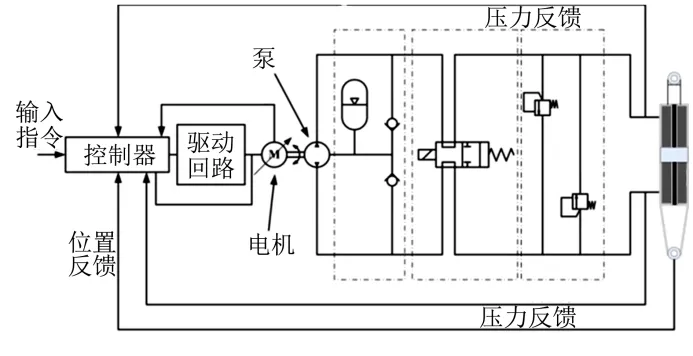
圖3 EHA原理示意 Fig.3 Schematic Diagram of EHA
2 異構作動系統的效率特性分析
2.1 HA與EHA效率的定義
本文將作動器效率定義為穩態時輸出功率與輸入功率的比值:

式中η為作動器效率;Pout為作動器的輸出功率;Pin為作動器的輸入功率。
考慮 HA的輸出功率,其輸出功率的形式是機械功率:

式中F為HA的外負載力;v為HA的活塞桿運動速度。
考慮 HA的輸入功率,其輸入功率的形式是液壓功率:

式中Pin為 HA 恒壓源壓力;Qin為流經伺服閥的流量。為降低計算難度,此處忽略 HA中的液壓泵和調壓系統的功率損失。
考慮EHA的輸出功率,其輸出功率的形式是機械功率:

式中F為EHA的外負載力;v為EHA的活塞桿運動速度。
考慮EHA的輸入功率,其輸入功率的形式是電功率:

式中PinEHA為 EHA的輸入功率;U為電機的輸入電壓;i為電機的電樞電流。
2.2 Matlab/Simulink與AMESim聯合仿真
綜合考慮Matlab/Simulink與AMESim在數學仿真中的優勢,設計以下仿真策略:在Matlab/Simulink中完成工作點的設定以及數據記錄的功能,在 AMESim中完成HA與EHA的仿真功能,見圖4。
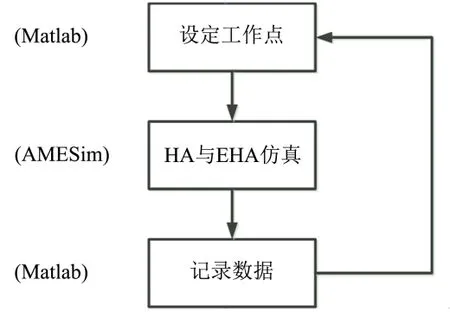
圖4 聯合仿真示意 Fig.4 Schematic Diagram of Co-simulation
a)關鍵參數設置。
HA和EHA的性能指標見表1,HA的關鍵參數見表2,EHA的關鍵參數見表3。

表1 性能指標 Tab.1 Performance Index
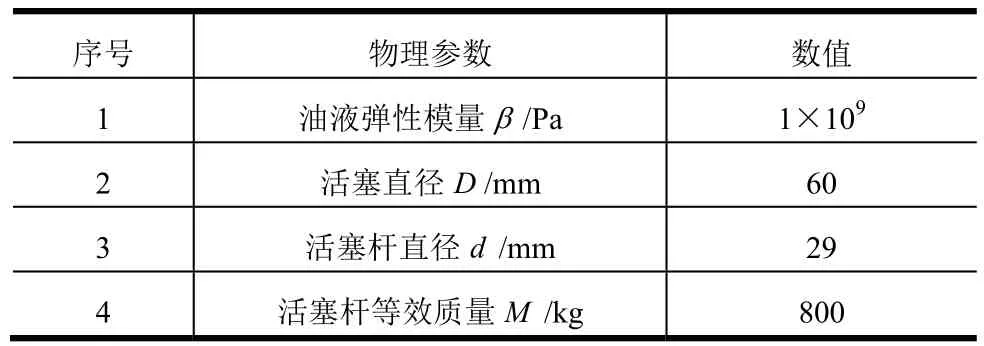
表2 HA關鍵參數 Tab.2 HA Key Parameters
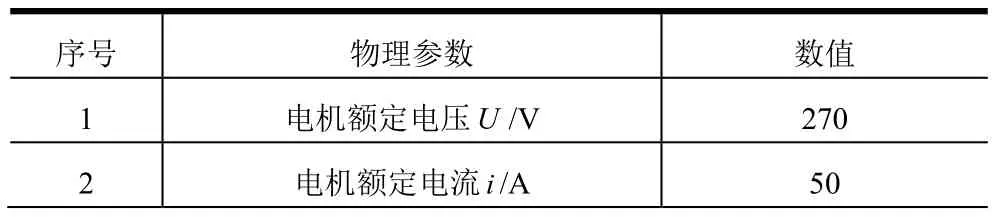
表3 EHA關鍵參數 Tab.3 EHA Key Parameters
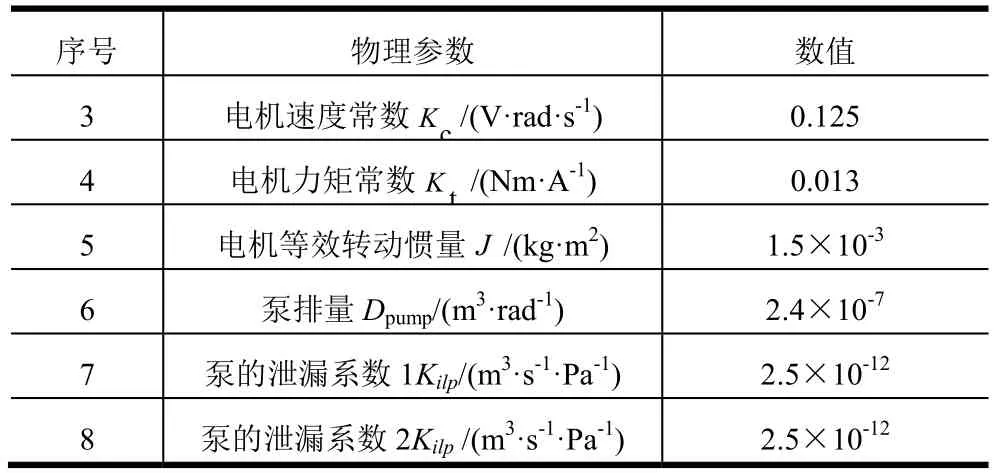
續表3
b)工作點的設定。
為盡可能準確的得到HA與EHA的效率特性,應在計算成本允許的條件下,盡可能多的設定工作點,與此同時,考慮到速度在零值附近變化較為劇烈,因此設計以下工作點選取方案:
1)考慮速度v,在 0~2 mm/s之間,每隔 0.5 mm/s設置一個工作點,在2~100 mm/s之間,每隔2 mm/s設置一個工作點;
2)考慮負載力F,在 0~40 000 N 之間,每隔800 N設置一個工作點。
3)仿真結果與分析。
在給定參數,給定工作點的條件下,HA的效率特性見圖5,EHA的效率特性見圖6。
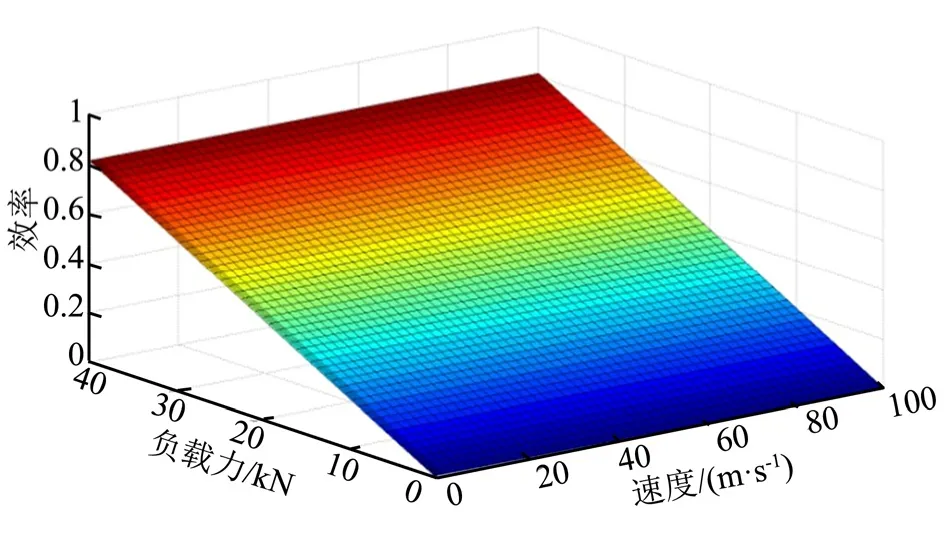
圖5 HA效率特性示意 Fig.5 Schematic Diagram of HA Efficiency Characteristic
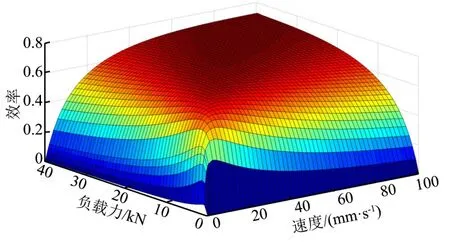
圖6 EHA效率特性示意 Fig.6 Schematic Diagram of EHA Efficiency Characteristic
對圖5及圖6進一步處理,獲取HA與EHA的效率對比示意圖,見圖7,曲線下方,EHA的效率高于HA的效率;曲線上方,HA的效率高于EHA的效率。從圖7中不難發現,在大多數工況下,EHA的效率均高于HA的效率,但當負載力大于35 000N時,HA的效率高于EHA的效率。
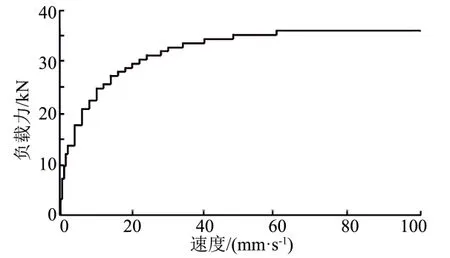
圖7 HA與EHA效率對比示意 Fig.7 Schematic Diagram of Efficiency Comparison Curve
3 HA與EHA的能量管理策略
3.1 基于切換機制的能量綜合管理策略
以活塞桿速度為X軸,以負載力為Y軸,確定異構作動系統的四象限工作模式,見圖8。當作動系統處于一、三象限時,作動系統做正功;當作動系統處于二、四象限時,作動系統做負功,見圖8。由于結構的限制,HA很難回收能量,而EHA中電機可工作在發電機狀態,存在回收能量的可能,因此,在順載狀態下,應旁通HA,讓EHA工作,回收能量[9,10]。
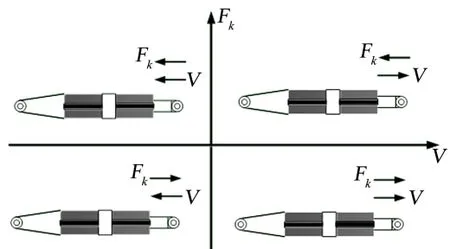
圖8 異構作動系統四象限工況示意 Fig.8 Schematic Diagram of Dissimilar Redundancy Actuation System Work Mode
在此基礎上,本文提出了一種全新的異構作動系統的工作模式:當作動系統處于順載工況時,EHA工作,HA旁通;當作動系統處于逆載工況時,EHA常態工作,HA旁通,僅當負載力達到切換條件時,HA工作,EHA旁通。
3.2 仿真結果分析
3.2.1 仿真工況設計
指令信號示意如圖9所示。位移指令分5個階段(見圖9a):第 1 個階段是 0~4 s,位移指令以 10 mm/s的速度上升;第 2個階段是 4~8 s,位移指令以 40 mm/s的速度上升;第3個階段是8~27 s,位移指令維持不變;第4個階段是27~31 s,位移指令以40 mm/s的速度下降;第5個階段是31~35 s,位移指令以10 mm/s的速度下降。假設負載力為彈性負載,即負載力與位移成正比例,故負載力指令也分5個階段(見圖9b),與位移指令相對應。
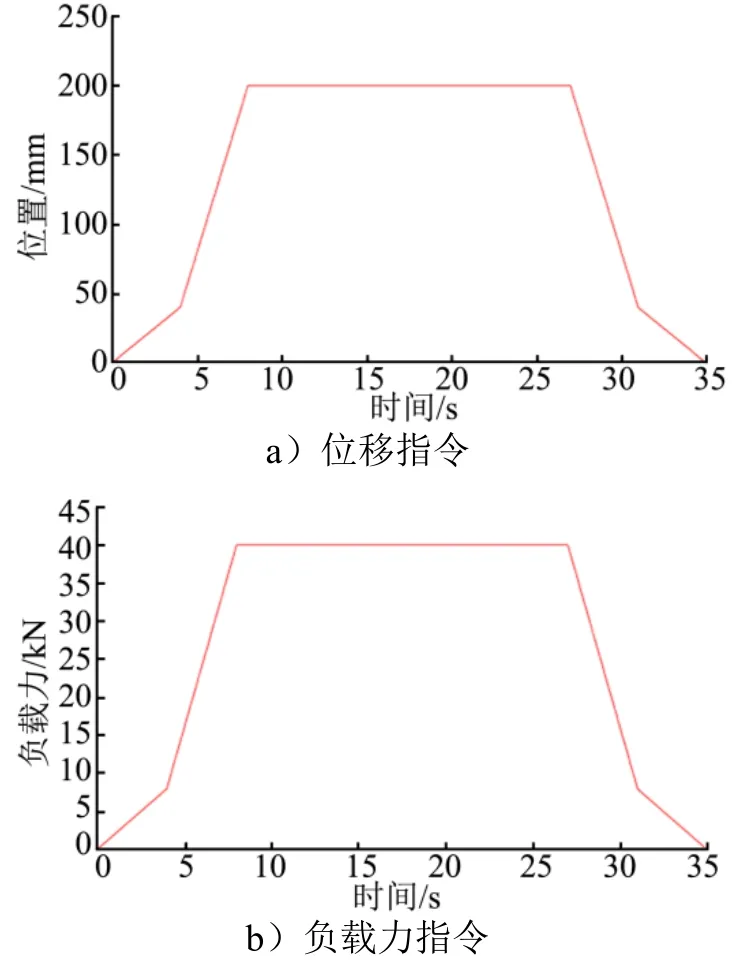
圖9 指令信號示意 Fig.9 Schematic Diagram of Input Signal
3.2.2 仿真結果分析
對于異構作動系統而言,在不考慮故障的情況下,存在3種工作模式:HA單獨工作(定義其為模式1);EHA單獨工作(定義其為模式2);以及本文提出的全新工作模式(定義其為模式 3)。3種模式的仿真結果分別見圖10至圖12。
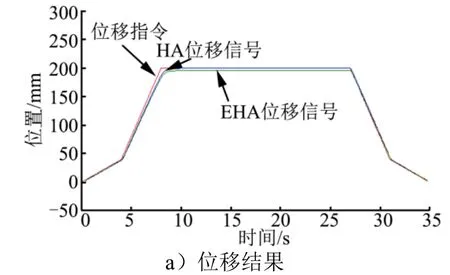
圖10 模式1仿真結果 Fig.10 Simulation Result of Model 1
續圖10
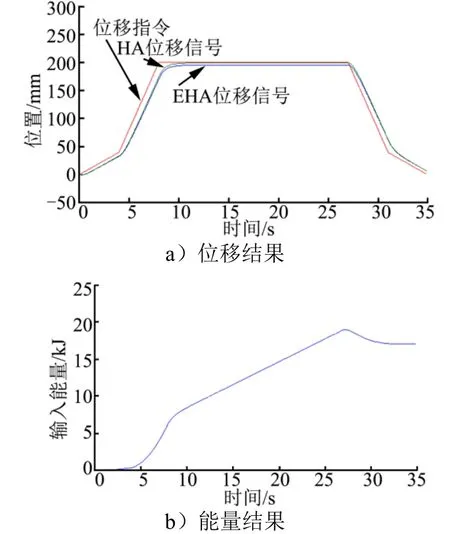
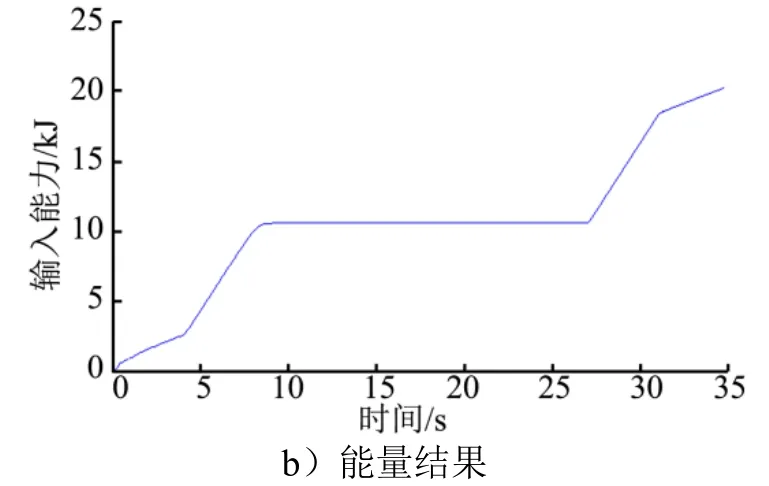
圖11 模式2仿真結果 Fig.11 Simulation Result of Model 2
圖12 模式3仿真結果 Fig.12 Simulation Result of Model 3
輸入能量方面,模式3較模式1和模式2有明顯優勢,模式3輸入能量僅7570 J,模式1輸入能量為20 300 J,模式 2 輸入能量為 17 100 J;位移跟蹤曲線方面,模式3較模式1和模式2有明顯劣勢,在7.3 s時,模式3中異構作動系統發生從狀態1(EHA做控制,HA旁通)到狀態2(HA做控制,EHA旁通)的切換,位移跟蹤曲線出現明顯“抖動”現象,在 27 s時,模式3中異構作動系統發生從狀態2到狀態1的切換,位移跟蹤曲線也出現了明顯的“抖動”現象。
4 結 論
對HA和EHA組成的異構作動系統進行研究,得到結論如下:a)在大多數工況下,EHA的效率均高于HA的效率,但當負載力大于35 kN時,HA的效率高于EHA的效率;b)提出一種基于效率特性的切換管理策略,即當作動系統處于順載工況時,EHA工作,HA旁通;當作動系統處于逆載工況時,EHA常態工作,HA旁通,僅當負載力達到切換條件(大于35 kN)時,HA工作,EHA旁通;c)選取位移跟蹤特性和能耗特性為評價指標,分析表明:本文提出的能量管理策略在能耗特性方面有較大的優勢,但在位移跟蹤曲線上出現了“抖動”的現象,即在控制平穩性方面,表現出一定的不足。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
商周刊(2017年9期)2017-08-22 02:57:49
電信科學(2016年10期)2016-11-23 05:11:56
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
西安航空學院學報(2014年5期)2014-07-13 01:27:52