一種基于改進光流法的視覺慣性狀態估計器
2021-04-26 04:12:36劉奕杉
科學技術創新 2021年10期
關鍵詞:系統
劉奕杉
(廣東工業大學,廣東 廣州510006)
1 概述
實時定位和建圖(SLAM)起源于20 世紀80 年代,它廣泛應用在移動機器人、無人機、虛擬現實、無人駕駛等領域。它解決的主要問題是機器人在未知環境的定位和建圖問題。傳統的定位方式多以GPS 為主,然而這種定位方式難以適應復雜陌生環境,所以SLAM 技術應運而生。SLAM 根據后端方法的差異,可以分為基于濾波和基于優化這兩大類,根據傳感器差異也可以分為激光SLAM 和視覺SLAM[1]。然而,單一傳感器難以滿足高精度的定位效果,所以在實際應用中,常見融合多種傳感器的信息用于機器人定位,常見的有視覺和慣性單元的融合。視覺傳感器可以提取現實場景豐富的信息,但它受環境影響大,當面對光照變化大、紋理缺失、快速運動等情形,無法有效追蹤物體運動。慣性單元可以得到加速度和角速度,且不受圖像質量的影響、采樣頻率較高,但存在長時間累計誤差的問題。所以視覺傳感器和IMU 具有優劣互補的特點。
本文研究基于光流法的視覺慣性SLAM 系統。我們結合改進的光流法和IMU 信息,然后基于LM 的非線性優化算法,實現了一個精度較高的視覺里程計。本文將從改進的光流法、慣性單元預積分,系統框架三部分對該方案進行描述,最后將通過實驗展示該系統的運行效果。
2 正文
2.1 光流法
Lucas-Kanade 光流法是Bruce D. Lucas 等人于1981 年在文獻[2][3]提出來的。它被廣泛地應用到圖像配準、運動追蹤,目標檢測等方面。根據計算圖像的部分像素或是全部像素的運動,可以將它分為稀疏光流法和稠密光流法。光流法的原理依賴于三個假設。第一個是灰度不變假設 I ( x + dx,y + dy,t + dt ) =I ( x, y , t ),它要求t 時刻在坐標(x,y)處的灰度值 I ( x, y , t)和t+1 時刻的灰度值I ( x + dx, y + dy, t +dt )相等。第二個是要求相鄰圖像幀是小運動。第三個是空間一致性,它假定相鄰像素之間具有相同的運動。光流法在視覺SLAM 中的前端被廣泛使用,它具有響應速度快、計算量小等特點。但同時光流法受光照影響大、相機發生大尺度運動容易跟丟、圖像的單個像素點沒有區分度等缺點。
為了更好地適應實際環境,需要對傳統的LK 算法進行改進。為提高光流追蹤的速度,我們采用逆向組合[4]的方法。傳統的LK 算法在更新參數的過程中需要不斷計算雅可比矩陣和Hessian 矩陣,降低了光流的追蹤效率。而使用逆向組合的方法可以使得算法在迭代過程中只需要計算一次Hessian 矩陣,這有效提高了光流算法的效率。傳統的光流法對光照變化比較敏感,所以使用一種局部差異平方和[5]的形式,將處理單個像素點的形式轉化為處理像素塊的形式。我們把相鄰圖像間對應像素塊的運動追蹤問題轉換為估計變換矩陣T。該變換矩陣T 最小化對應像素塊之間的差值,我們將它定義為如下的殘差形式。

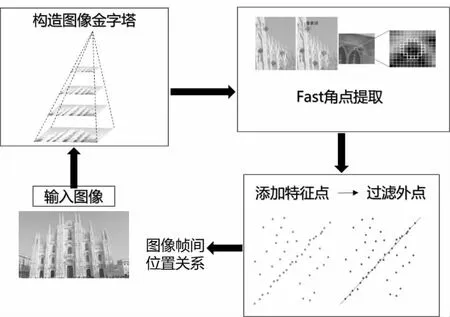
圖1 前端流程
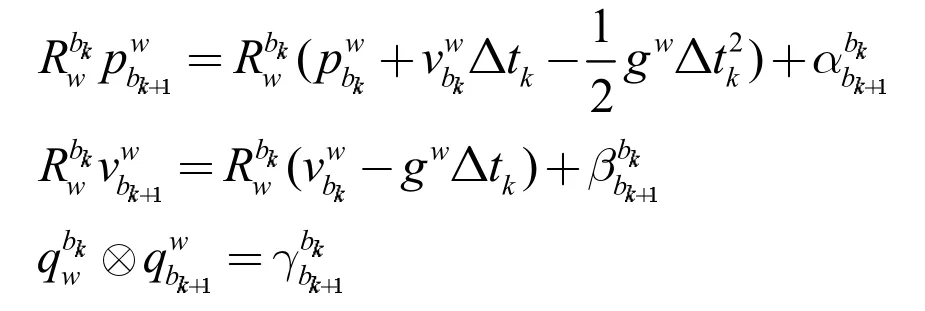
2.2 IMU 預積分
由于純視覺的定位方式難以實現魯棒的定位要求,所以采用視覺融合IMU 的方式可以更好的讓系統適應現實需求。根據IMU 模型,我們得到連續時間下的運動模型。
圖2 不同噪聲條件的參考軌跡和估計軌跡


2.3 系統框架
該系統主要分為基于光流法的前端、基于LM 非線性優化的后端、系統初始化部分。首先,光流法前端不斷接收單目相機的圖像數據,并對圖像進行FAST 角點的提取,再使用光流法追蹤相鄰圖像幀間的特征點,從而得到運動軌跡。同時,系統不斷接收IMU 的加速度和角速度的數據,并對圖像幀間的IMU 數據進行積分處理。然后進行系統初始化,該方法主要是借鑒了VINSMONO 的系統初始化[7],可以恢復出尺度、重力、速度和IMU 的bias,從而將視覺軌跡和IMU 軌跡對齊。而后,將視覺和IMU 得到的軌跡放入到后端非線性優化當中,該部分主要使用了LM 算法不斷迭代優化相機位姿,從而得到準確的相機運動軌跡。
3 實驗與分析
該系統的實驗環境是ubuntu18.04,使用多線程進行數據傳輸。同時,使用了pangolin 庫可視化相機的運動軌跡。此外,生成自定義軌跡測試系統,并設置了三種噪聲情況,分別是噪聲軌跡1: acc-n: 0.02,gyr-n: 0.015,acc-w: 0.0001,gyr-w: 1.0e-5;噪聲軌跡2: acc-n: 0.04,gyr-n: 0.03,acc-w: 0.0002,gyr-w: 2.0e-5;噪聲軌跡3: acc-n: 0.2,gyr-n: 0.15,acc-w: 0.001,gyr-w: 1.0e-4。我們使用evo 評估系統在三種噪聲情況下的運動誤差,得到了不同情況下參考軌跡與估計軌跡的絕對誤差,具體數值如表1所示。不同的噪聲情況得到的參考軌跡和估計軌跡如圖2 所示。實驗結果表明,系統估計的軌跡能較好擬合參考軌跡,證明了系統對不同噪聲環境的有效性和魯棒性。但是,從表1 的數據分析,該系統會出現殘差平方和較大的情況,而本次實驗的場景不夠豐富,且穩定性不足,因此,該系統還有待進一步完善。
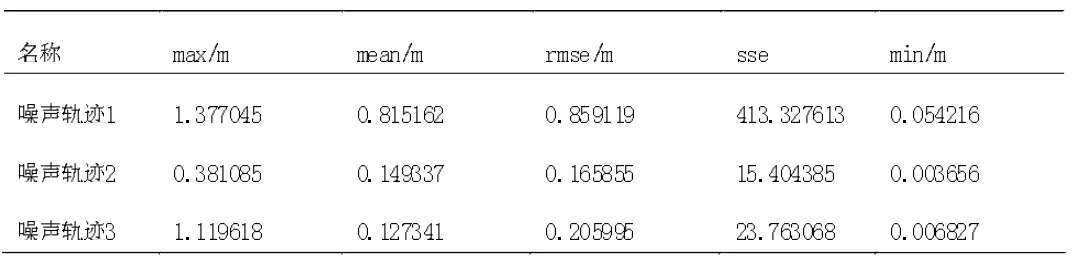
表1 不同噪聲條件的絕對軌跡誤差
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
