城市軌道交通全自動運行列車的需求分析
2021-04-27 07:29:24陳春輝
城市軌道交通研究 2021年4期
陳春輝
(深圳地鐵建設集團有限公司,518035,深圳 ∥ 高級工程師)
列車作為乘客運輸和安全運營的主體,在地鐵運營過程中起著至關重要的作用。城市軌道交通全自動運行列車在完全沒有司機和乘務人員參與的情況下,由控制中心統一控制,可實現全自動運營。其自動完成休眠、喚醒、自檢、運行、精確停車、開關車門及洗車等操作,在故障情況下還能實現自動恢復等。本文以CBTC(基于通信的列車控制)制式的傳統列車作為比較對象,對全自動運行列車從功能需求、RAMS(可靠性、可用性、可維護性和安全性)需求以及列車設計需求等方面進行分析。
1 列車功能需求分析
與傳統列車相比,全自動運行列車增加了自動喚醒、休眠、故障報警、障礙物檢測、脫軌檢測及低壓系統恢復供電等功能。此外,全自動運行列車還需在傳統列車的基礎上增強車門系統控制功能和火災報警功能,增強電磁兼容性,各子系統也需冗余配置。全自動運行列車功能與傳統列車的功能差異主要體現在運行模式、遠程控制、列車聯動、列車狀態監控等方面。
1.1 運行模式的功能需求
全自動運行列車在傳統列車的駕駛模式基礎上,新增了FAM(全自動駕駛模式)和CAM(蠕動模式)。
在FAM下,ATP(列車自動防護)子系統負責保證列車的運行安全,ATO(列車自動運行)子系統負責完成列車在區間的自動運行、調整及對位停車控制等。在列車到站自動對位停車時,如出現停車對標不準的情況,ATO子系統應能自動進行對位調整,實現車門與站臺門的對標。在實現對標不準自動對位調整時,需要列車響應信號系統的精細化調整策略,實現精確對標。
CAM為FAM的應急模式。當列車通信網絡出現故障,或列車通信與信號車載設備通信發生故障時,列車先向控制中心申請切換為蠕動模式;在列車停車后,經控制中心確認,列車運行模式由FAM切換為CAM。因列車通信網絡存在問題,部分列車狀態不可實時監控,故列車需限速運行。在CAM下,ATP子系統監控列車以不超過25 km/h的速度自動運行至下一座車站對標停車,并在自動打開車門完成清客后,在站臺等待工作人員上車對故障進行處理。
1.2 控制功能需求
傳統列車的電氣設備由司機來操控。為實現行車控制,全自動運行列車的電氣設備增加了遠程控制功能。全自動運行列車的遠程控制功能需求主要有:
1) 替代司機進行列車激活及斷電功能。具體有遠程喚醒功能及休眠功能等。
2) 替代司機進行常規調節操作的功能。此類功能包括遠程控制空調、照明、刮雨器及電熱玻璃等。在FAM下,列車智能控制系統依據工況來自動控制空調與照明的啟閉:在上線工況下自動開啟空調、照明;在待命工況下自動關閉中間車的空調系統,并降低照明亮度或關閉照明。通過遠程控制功能,也可對空調及照明進行人工控制。在列車喚醒與休眠過程中, TCMS(列車監控管理系統)按照設定的流程條件控制受電弓實現自動升降;在特殊工況下,工作人員也可遠程手動控制受電弓的升降。
3) 特殊工況的遠程操作功能。除正常系統自動控制之外,特殊工況還需要工作人員進行受電弓升降遠程控制或列車對標停車后的遠程開關車門等操作。
4) 應用于列車排除故障的遠程控制功能。當牽引或輔助系統因發生故障而被隔離時,可嘗試通過遠程復位功能,使隔離的牽引逆變器或輔助逆變器重新投入運行。遠程復位斷路器,是影響行車的關鍵斷路器。當其異常跳開且自復位一次失敗時,在列車靜止且沒有火災告警情況下,可通過遠程復位斷路器來恢復。對于PIS(乘客信息系統)主機等較常需要斷電重啟的重要設備,可對其供電回路設置遠程跳開及復位斷路器,以便在其實現遠程斷電重啟,進而使設備從故障狀態恢復正常。
5) 遠程復位單個轉向架空氣制動單元的功能。如出現單個轉向架空氣制動緩解不良的情況,影響了列車起動,可通過該功能來嘗試復位發生了故障的轉向架,進而排除故障,使列車具備運行條件。
1.3 列車狀態監控功能需求
傳統列車由司機監控運行。當列車出現故障時,由司機處置并報告行車調度員;行車調度員依據司機報告的列車狀態進行運營組織決策。
為了遠程監視列車運行狀態,全自動運行系統需在地面設置列車調度工作站來替代行車監控功能。列車調度工作站通過車地無線通信傳輸通道來接收全線列車實時的狀態信息(如圖1所示),對全線列車的運行狀態進行實時監控,根據列車發生的故障情況進行及時處理。

圖1 列車調度工作站狀態監控界面
1.4 列車聯動功能需求
列車運行中的應急事件有乘客緊急對講請求、車門緊急解鎖、車門狀態丟失、車門檢測到障礙物、逃生門蓋板被打開、司機操作臺蓋板被打開、電氣柜門被打開、滅火器被移動、感煙或溫煙組合探測器檢測到火災等。在傳統列車上,司機負責對應急事件進行處理。而全自動運行列車應具有在應急事件場景中快速反應的聯動功能:
1) 當車上發生應急事件時,車載CCTV(閉路電視)及車載PIS立即啟動聯動功能,將觸發源對應區域的攝像頭,通過車地無線通信傳輸通道傳送至OCC(運營控制中心)調度臺,以供調度人員第一時間掌握現場情況。同時,TCMS將對應的告警信息同步發送至控制中心的各調度臺。
2) 車門緊急解鎖、逃生門蓋板、司機臺蓋板打開等突發事件,可觸發對應的乘客緊急對講功能,以方便OCC調度人員第一時間與現場乘客溝通。
3) 在列車火災或區間火災等場景下,需聯動空調系統進行運轉調整,以免給乘客帶來進一步危害。如發生區間火災,則在區間運行的列車收到區間火災信號后,應立即關閉新風及廢排,以避免區間火災產生的濃煙被吸入列車,直至列車通過火災區域后,再取消區間火災信號,使空調系統恢復正常運行。
4) 全自動運行列車應配置障礙物及脫軌檢測系統,來檢測軌道是否有影響列車運行的障礙物或列車是否脫軌。如檢測到障礙物或脫軌信息,則立即觸發列車的緊急制動。列車通過緊急制動來降低車速,可減少因列車碰撞障礙物或脫軌而造成的人員損傷。同時,該檢測系統將障礙物及脫軌檢測信息作為緊急信號報送給OCC行車調度員,并將行車攝像頭視頻推送至OCC調度員。行車調度員組織工作人員現場處置,只有等到所有障礙物引起的風險解決后才能恢復正常運行。
2 全自動運行列車的RAMS需求分析
與傳統列車相比,全自動運行列車需面對更高的安全風險挑戰,其RAMS要求更高。
2.1 安全完整性等級要求
依據EN 50128與EN 50129標準要求,基于全自動運行列車的安全風險分析,針對風險分配、邊界危害的控制,參照相關經驗,列車子系統及設備的SIL(安全完整性等級)應滿足表1要求。
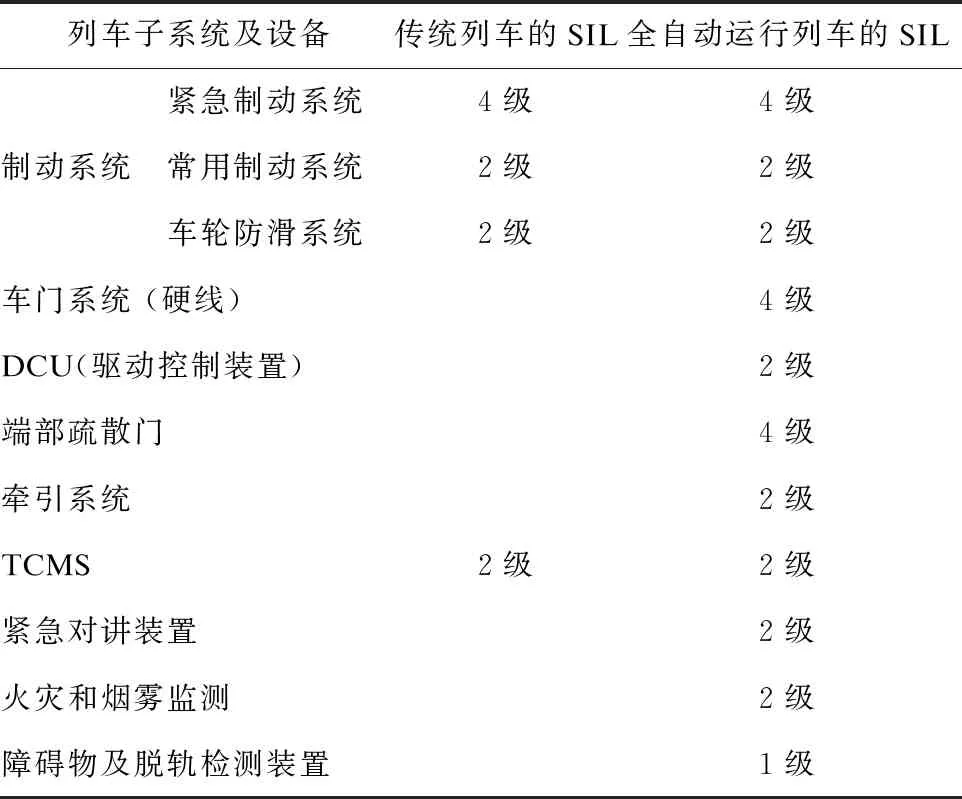
表1 全自動運行列車SIL需求
針對安全性風險,對列車開展PHA(初步危害分析)、安全評估、IHA(接口危害分析)、SSHA(子系統危害分析)、O&SHA(運營和支持危害分析)、FTA(故障樹分析)及FMECA(故障模式影響和危害性分析)等安全性分析。通過安全分析對存在的危害風險進行識別,進而采取積極的應對措施,降低危害風險對全自動運行列車運行的影響。
2.2 可靠性要求
列車發生故障的頻率反映了列車的可靠性。按故障導致的后果,列車故障可分為兩類:①導致列車發生≥2 min初始延誤的故障;②導致不適合繼續服務或未能出車的故障。具體的故障頻率控制目標如表2所示。
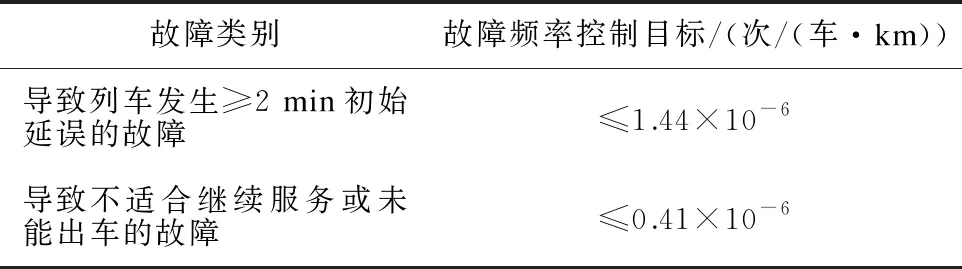
表2 全自動運行列車的故障頻率控制目標
全自動運行列車的可靠性指標還需參照既有項目的故障數據等,來分配列車各子系統的可靠性指標權重,以使整車的可靠性指標可控。
2.3 可維修性要求
根據全自動運行列車可維修性用時要求,列車在線維修可更換單元不超過0.5 h,無需架車作業的維修工作不超過4.0 h,需架車維修的作業不超過6.0 h。
3 全自動運行列車的設計需求分析
基于更高的RAMS要求,全自動全自動運行列車整體的設計要求更高。
3.1 列車網絡系統的冗余性
全自動運行列車ATC(列車自動控制)子系統、TCMS、PIS、BCU(制動系統)、EDCU(車門系統)等均要求網絡通道冗余,主從熱備冗余。此外, TCMS的I/O(輸入/輸出)模塊也要進行冗余采集及控制。
3.2 硬件電路設計需求
在列車激活電路上:傳統列車一般從列車一端發出指令,激活列車;全自動運行列車從列車兩端同時發出激活指令,使列車激活上電,可提高列車喚醒的成功率。
為盡可能地提高列車可靠性,全自動運行列車的牽引授權、方向選擇、緊急制動等關鍵控制電路均為冗余設計,降低了電路單點故障對列車運行的影響。
傳統列車的乘客緊急對講裝置不關聯列車牽引授權。全自動運行列車的乘客緊急對講裝置關聯了列車牽引授權:當乘客按壓緊急對講按鈕后,未發車的列車將扣留在站臺,已發車的列車將在下一站扣車,以處理乘客緊急對講請求。
車門控制電路采取控制電路冗余設計,當一路控制電路發生故障時,另一路控制電路能打開一半車門。
3.3 底架設備懸掛的二次防護需求
為減少底架設備掉落的風險,應對在車輛底架安裝的設備采取二次防護措施,以防止因設備緊固不足導致其脫落至軌道而影響行車安全。
4 結語
全自動運行系統實現了監控軌道、監控乘客上下車、監控列車和應急處理等的自動化。列車是全自動運行系統關鍵的子系統。相對傳統列車,全自動運行列車的可靠性、可用性、可維護性及智能化等方面要求更高。本文探討了全自動運行列車的功能需求、RAMS需求及列車設計需求,以期為全自動運行列車的設計及全自動無人駕駛系統的發展提供參考。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39