淺析船舶旋回過程及MATLAB仿真
2021-04-28 03:28:08李紀(jì)強(qiáng)張國慶
船舶 2021年2期
李紀(jì)強(qiáng) 張國慶
(大連海事大學(xué) 航海學(xué)院 大連116026)
引 言
旋回圈幾何參數(shù)是表示船舶旋回性能的重要指標(biāo),是判斷船舶旋回優(yōu)劣的直接依據(jù)。一般選擇具有實(shí)際意義的特征參數(shù)來描述船舶的旋回性能。IMO操縱性標(biāo)準(zhǔn)中已經(jīng)把進(jìn)距和旋回初徑兩個(gè)參數(shù)作為船舶旋回性能的衡準(zhǔn)。
船舶大型化已是當(dāng)今船舶發(fā)展的一個(gè)趨勢,但是由于大型船舶相對較重且慣性大和停船距離長等特點(diǎn),其均應(yīng)具備良好的旋回性能。在特殊會(huì)遇情況下,為避免發(fā)生突發(fā)性危險(xiǎn),大型船舶所采取的避碰措施與普通船舶也存在差異,并且大型船舶在船舶旋回過程中所表現(xiàn)出的較明顯速度下降這一現(xiàn)象,已引起眾多學(xué)者的研究和航海駕駛員在實(shí)際航行中的運(yùn)用。
滿舵旋回是船舶避碰領(lǐng)域中船舶緊急避讓時(shí)經(jīng)常采用的一種避讓方法,因此,研究船舶旋回運(yùn)動(dòng)過程,分析船舶旋回運(yùn)動(dòng)過程中各特征參數(shù)的變化以及旋回速降對于船舶避免碰撞,有一定的實(shí)際意義。Kempf于20世紀(jì)40年代首先提出一種衡量船舶機(jī)動(dòng)性能的試驗(yàn)方法,即Z型試驗(yàn)。此后,在20世紀(jì)50年代,野本謙作和諾賓發(fā)展了一種對Z型試驗(yàn)結(jié)果進(jìn)行理論分析的新方法——K
、T
分析法,其中的K
、T
指數(shù)可描述船舶操縱性能,所以稱其為操縱性指數(shù)。戴維遜和李宗波等人又根據(jù)大量實(shí)船試驗(yàn)和船模試驗(yàn)繪制了回轉(zhuǎn)速降系數(shù)與相對回轉(zhuǎn)直徑之間關(guān)系的曲線。1 Nomoto模型與K、T指數(shù)
1.1 Nomoto模型的建立
1.1.1 船舶平面運(yùn)動(dòng)描述
船舶運(yùn)動(dòng)數(shù)學(xué)模型主要建立在兩種坐標(biāo)系上,即慣性坐標(biāo)性和附體坐標(biāo)系,如圖1和圖2所示。
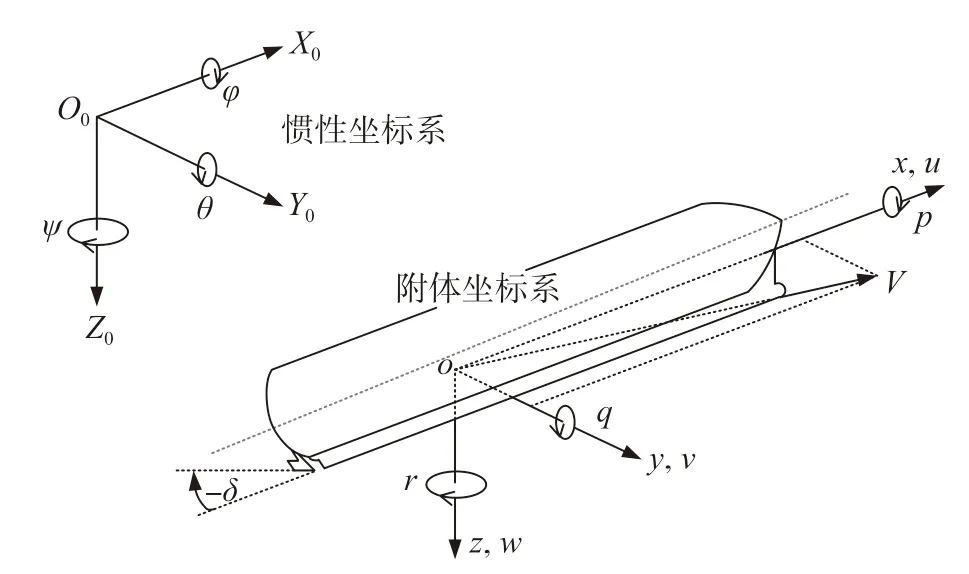
圖1 在慣性坐標(biāo)系和附體坐標(biāo)系中描述船舶的運(yùn)動(dòng)
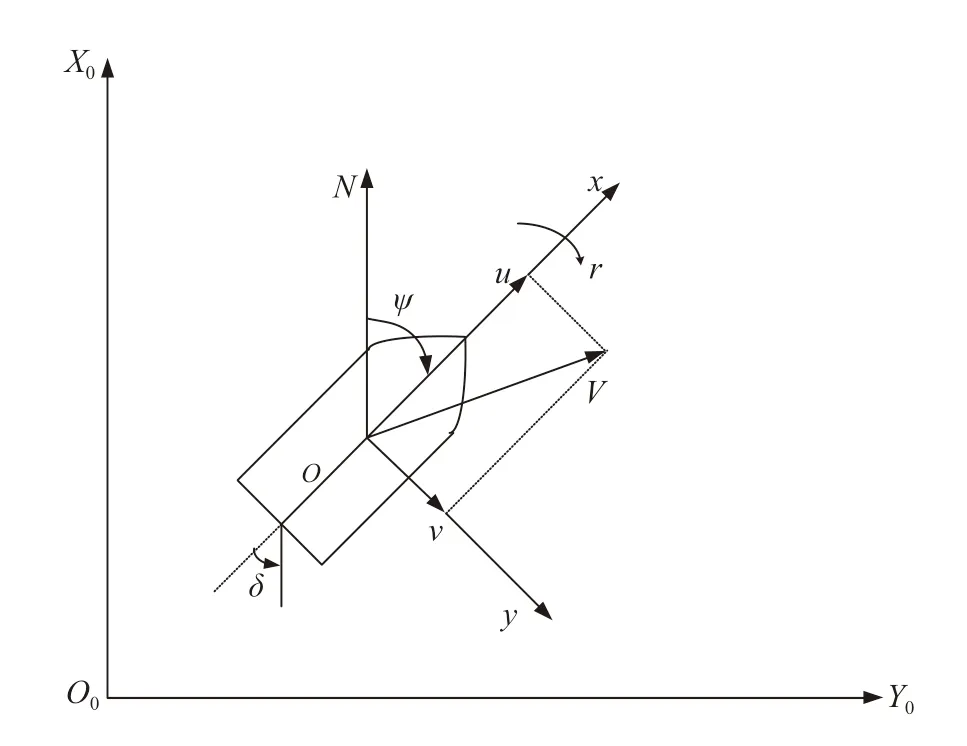
圖2 船舶平面運(yùn)動(dòng)描述
船舶運(yùn)動(dòng)研究通常僅考慮船舶在水平面內(nèi)的運(yùn)動(dòng),因此船舶的前進(jìn)、艏搖和橫漂三自由度的運(yùn)動(dòng)情況如圖2所示。
1.1.2 二階響應(yīng)型數(shù)學(xué)模型
船舶水平面操縱運(yùn)動(dòng)的二階響應(yīng)模型是將船舶運(yùn)動(dòng)線性方程的后兩個(gè)式子中的v
消去,僅考慮船舶的兩個(gè)自由度橫漂速度v
和轉(zhuǎn)艏角速度r
,船舶操縱運(yùn)動(dòng)的線性方程如下
δ
為舵角輸入,系數(shù)a
、a
、a
、a
、b
、b
由船舶的基本參數(shù)確定。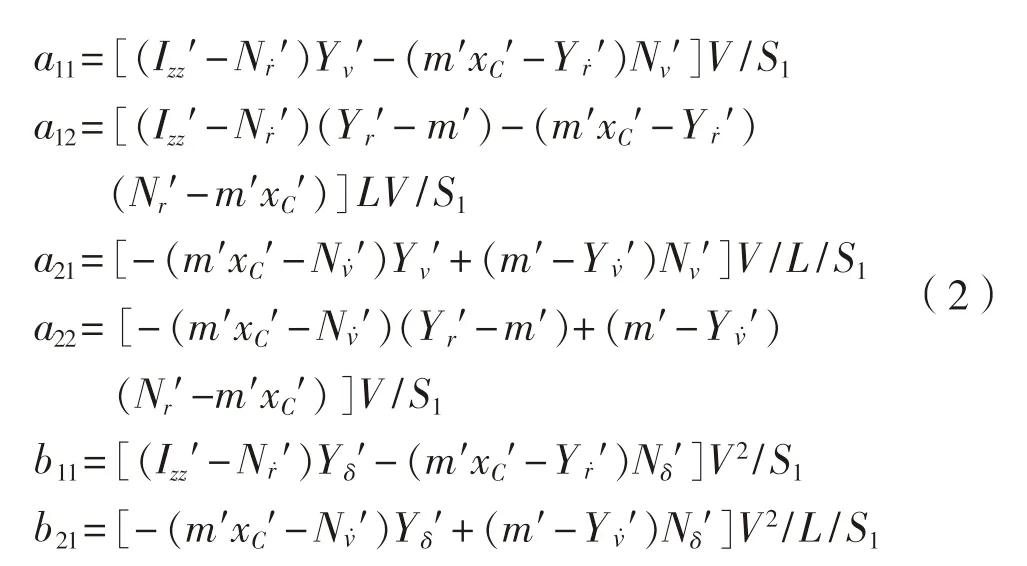
式(1)可轉(zhuǎn)換為一個(gè)描述操舵對艏搖響應(yīng)的簡單方程,即


1.1.3 一階響應(yīng)型模型
對式(3)作拉氏變換,可由二階方程推出一階K
、T
方程,并設(shè)定初始值為
由此可得到船舶轉(zhuǎn)首對操舵響應(yīng)的傳遞函數(shù)

s
為拉普拉斯算子。
此外,對一階慣性環(huán)節(jié)的傳遞函數(shù)按冪級數(shù)展開,得




和
該式等價(jià)于

K
、T
方程(對于r
來說),也稱為Nomoto模型。1.2 操縱性指數(shù) K、T
式(10)是描述船舶操縱運(yùn)動(dòng)的簡單實(shí)用方程。野本謙作認(rèn)為,K
、T
是一種描述船舶操縱特性的特征參量,具有明確的物理意義。1.2.1 船舶操縱性指數(shù)K
K
指數(shù)是操舵后轉(zhuǎn)船力矩系數(shù)與阻尼力矩系數(shù)之比所決定的常數(shù),反映了船舶的旋回性的優(yōu)劣,稱“旋回性指數(shù)”。K
值越大,表示舵產(chǎn)生的回轉(zhuǎn)力矩大而阻尼力矩小;反之,K
值越小,表示舵產(chǎn)生的回轉(zhuǎn)力矩越小而阻尼越大。實(shí)際操船中,操船者總是希望K
值越大越好,表示舵效越好。1.2.2 船舶操縱性指數(shù)T
T
指數(shù)是船舶繞其重心G
豎軸的慣性矩與阻尼力矩系數(shù)之比所決定的常數(shù),代表船舶對舵的快速應(yīng)答性和航向穩(wěn)定性,反映船舶追隨性的優(yōu)劣,稱為“追隨性指數(shù)”。T
值越大,表示船舶慣性大而阻尼力矩小;反之,T
值越小,表示船舶慣性小而阻尼力矩大。T
也被稱為時(shí)間常數(shù),該時(shí)間越短越好,則舵效越好。所以對于操縱性良好的船舶應(yīng)具有大的正K
值和小的正T
值。2 旋回要素與參數(shù)變化
2.1 旋回圈特征參數(shù)
船舶旋回性最能代表船舶的變向性能,歷史上對旋回性的研究也最多。當(dāng)船舶以速度u
直線航行時(shí),操舵后船舶即在水平面內(nèi)作曲線運(yùn)動(dòng),其軌跡如圖3所示。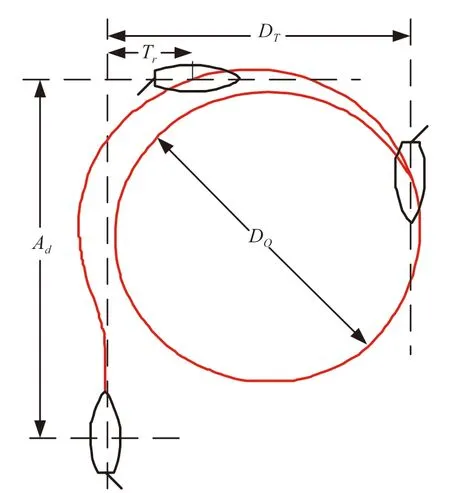
圖3 船舶旋回圈
船舶重心的瞬時(shí)位置為旋回運(yùn)動(dòng)起始點(diǎn),稱為執(zhí)行操作點(diǎn)。由于船舶慣性較大,艏向角ψ
需改變一定數(shù)值后,其軌跡才進(jìn)入曲率半徑為常數(shù)的定圓,艏向角再改變一定數(shù)值后,轉(zhuǎn)首角速度才變?yōu)槌?shù),此時(shí)船舶達(dá)到了定常旋回,旋回圈的主要參數(shù)為:(1)縱距:船舶從旋回開始,艏向轉(zhuǎn)過90°
時(shí),船舶重心距離初始位置的縱向距離A
。該值越大,船舶的旋回性越差。(2)橫距:船舶從旋回開始,艏向轉(zhuǎn)過90°
時(shí),船舶重心距離初始航線的長度T
,該值越小,船舶的旋回性越好。(3)反移量:從船舶初始直航線至運(yùn)動(dòng)軌跡向回轉(zhuǎn)圈相反方向橫移的最大距離L
,滿舵時(shí)約為船寬的1.0~1.5倍。(4)旋回中的船速V
:船舶旋回過程中,船速不斷下降,旋回中的船舶速度與初始船舶速度的比值為船舶旋回速降系數(shù)。2.2 旋回運(yùn)動(dòng)過程分析
從船舶運(yùn)動(dòng)學(xué)角度考察船舶的旋回運(yùn)動(dòng),其運(yùn)動(dòng)過程可分為3個(gè)階段,即轉(zhuǎn)舵階段、過渡階段和定常旋回階段。旋回運(yùn)動(dòng)過程中運(yùn)動(dòng)參數(shù)的變化如圖4所示。
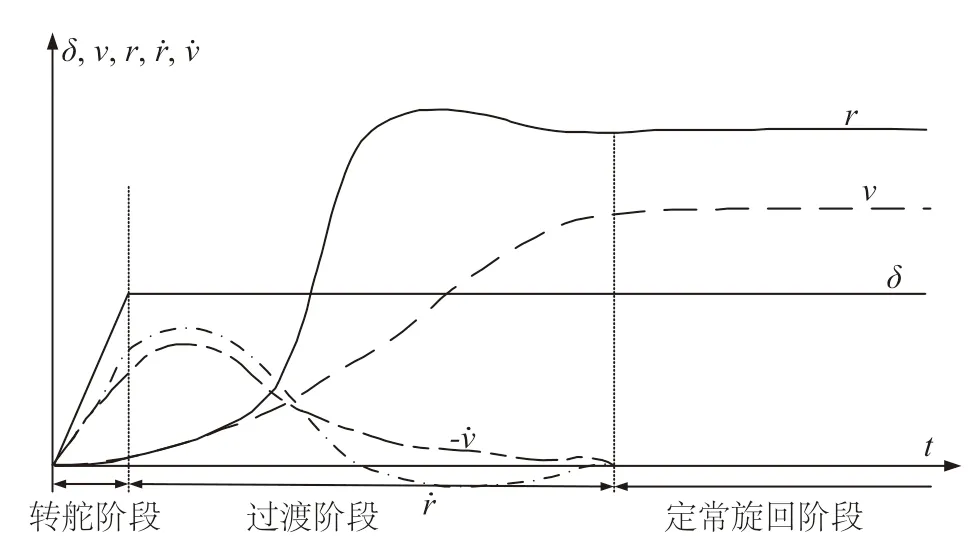
圖4 旋回運(yùn)動(dòng)過程中運(yùn)動(dòng)參數(shù)的變化
2.2.1 初始階段
在舵角達(dá)到規(guī)定值之前為船舶旋回初始階段。在此階段,船舶發(fā)生內(nèi)傾,產(chǎn)生各自由度的加速度和速度及角速度,在操右舵時(shí),舵橫向力的方向?yàn)樨?fù)(向左),轉(zhuǎn)舵力矩的方向?yàn)檎担槙r(shí)針),且由于船舶慣性較大,因此船舶在此階段基本保持原直線運(yùn)動(dòng)。
2.2.2 過渡階段
在過渡階段,舵角達(dá)到(δ
)且不變,船舶前進(jìn)、橫漂、艏搖等自由度上均存在加速度和速度,且加速度在不斷變化,船舶發(fā)生外傾。2.2.3 定常階段
在船舶旋回過程中,在經(jīng)過一段時(shí)間后,船舶各自由度上加速度均為0,速度和角速度為一定常量,此時(shí),船舶進(jìn)入定常旋回階段。
2.3 旋回過程速降研究
在船舶旋回運(yùn)動(dòng)過程中,會(huì)產(chǎn)生船舶運(yùn)動(dòng)速度降低的現(xiàn)象。其原因之一是由于旋回運(yùn)動(dòng)過程中,橫向速度v
和角速度r
的存在使船舶處于斜航和和旋轉(zhuǎn)狀態(tài),船舶阻力比直航時(shí)大為增加;其原因之二是由于螺旋槳通常設(shè)計(jì)為直航狀態(tài)時(shí)的推進(jìn)效率最高,而船舶旋回過程中v
、r
、δ
的存在使螺旋槳推進(jìn)效率大為降低。另外,船舶旋回過程中由于阻力的增大,螺旋槳轉(zhuǎn)速也會(huì)相應(yīng)降低。因此,這些因素都導(dǎo)致船舶旋回運(yùn)動(dòng)過程中的船速下降,稱為“旋回速降”。船舶旋回速降與初始船速、船型、載況等諸多因素有關(guān)。萬噸級船舶一般旋回降速達(dá)25%~50%,大型船舶旋回速降更為劇烈,有時(shí)甚至可達(dá)65%以上。
李宗波等人在研究了國內(nèi)外關(guān)于速降系數(shù)的研究后,綜合了速降系數(shù)的影響因素可以取3個(gè)代表性的因素來衡量,分別為旋回性指數(shù)K
′、舵的法向力系數(shù)C
和航向改變量Δψ
。在43艘船舶的基礎(chǔ)上,李宗波等人又搜集了4艘超大型船的K
′、T
′指數(shù)資料,利用47艘船的資料回歸分析得到修訂的K
′、T
′估算公式為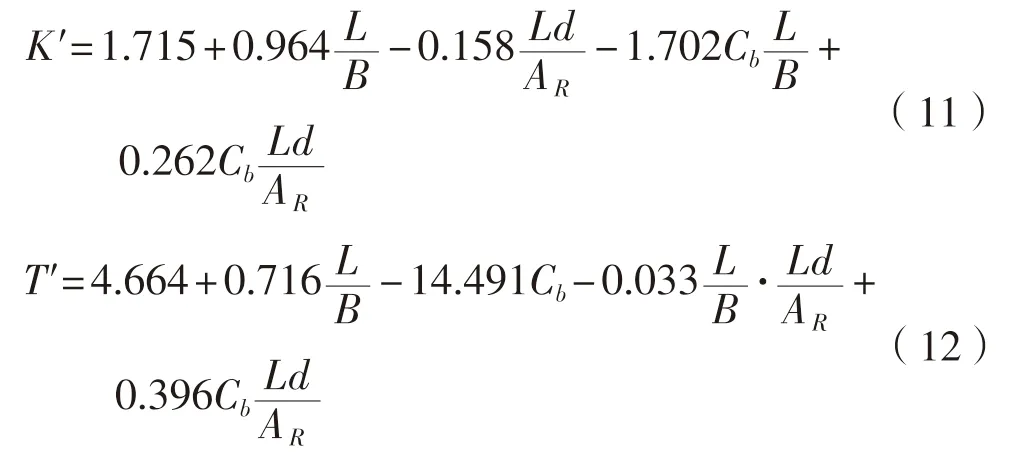
L
、B
、d
分別為船長、船寬和吃水,m;A
為舵面積,m;C
為方形系數(shù)。修訂后的K
′、T
′估算公式的擬合優(yōu)度指標(biāo)即復(fù)相關(guān)系數(shù) 略有增加,分別達(dá)到了0.792和0.851。由修正后的K
′、T
′,進(jìn)行多次最優(yōu)回歸分析,可以得到船舶旋回速降系數(shù)估算公式。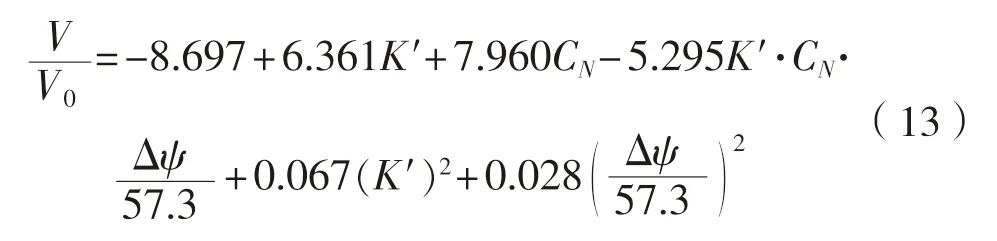
ψ
的單位為(°)。表1 給出了OPALIA輪壓載狀態(tài)下滿舵旋回試驗(yàn)中的速降記錄結(jié)果。可見定常旋回時(shí)的船速約為初始船速的1/5,同樣,旋回方向?qū)π亟邓儆绊懖淮蟆?/p>
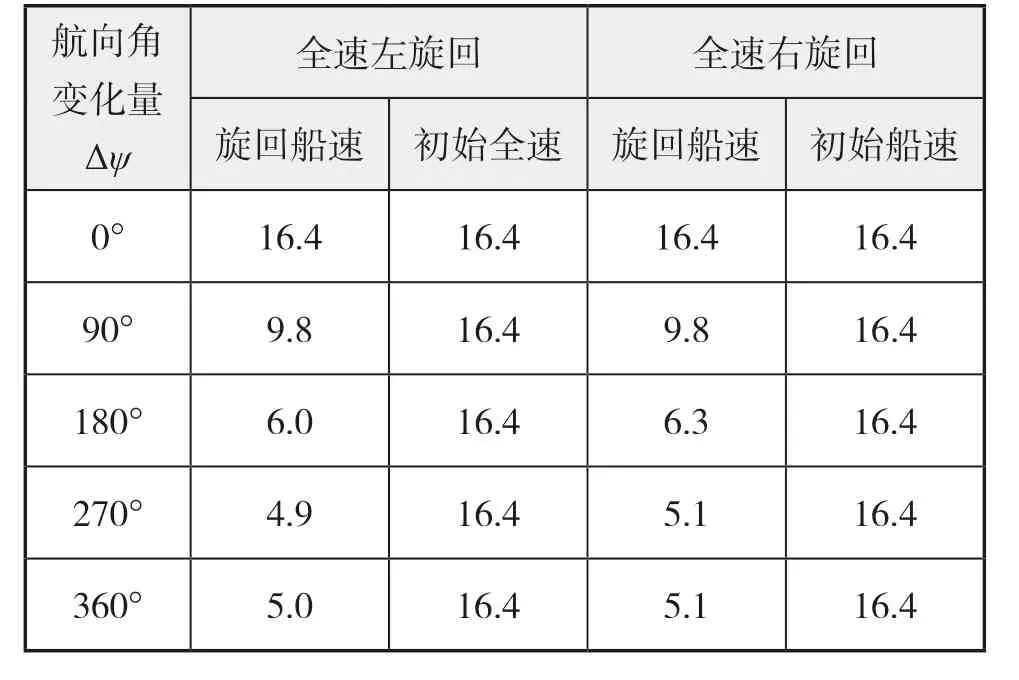
表1 OPALIA輪壓載狀態(tài)下的速降記錄kn
本文采用李宗波等人提出的速降估算公式,對30萬噸油輪OPALIA輪進(jìn)行MATLAB仿真驗(yàn)證并與實(shí)船結(jié)果進(jìn)行比較,驗(yàn)證了對于李宗波等人研究結(jié)果對超大型船舶旋回速降的預(yù)報(bào)性。進(jìn)行了壓載狀態(tài)下全速滿舵(δ
= 35°
)旋回的速降預(yù)報(bào)。該輪主尺度為:兩柱間長L
= 320 m、船寬B
= 60 m;試驗(yàn)時(shí),平均吃水d
= 10.660 m、方形系數(shù)C
= 0.743 4,舵面積比A
/(Ld
)=1/35.04。經(jīng)式(12)計(jì)算得到K
′=1.396 6;舵角35°
時(shí),舵的法向力系數(shù)C
=1.257 4。圖5和圖6分別表示OPALIA輪在壓載左滿舵和壓載右滿舵(δ
= 35°
)情況下的旋回速降實(shí)驗(yàn)對比圖。圖中:藍(lán)色實(shí)線表示旋回速降的實(shí)時(shí)預(yù)報(bào),黑色離散點(diǎn)表示OPALIA輪在實(shí)際旋回實(shí)驗(yàn)中監(jiān)測到的旋回速降數(shù)值。從圖5和圖6可以看出,旋回速降預(yù)報(bào)曲線和實(shí)際速降數(shù)值變化曲線基本一致,由此說明旋回速降預(yù)報(bào)公式的有效性。
圖5 OPALIA輪壓載左滿舵(35°)旋回速降圖

圖6 OPALIA輪壓載右滿舵(35°)旋回速降圖
2.4 旋回試驗(yàn)與MATLAB仿真
本節(jié)利用MATLAB仿真響應(yīng)型數(shù)學(xué)模型,試驗(yàn)對象為大連海事大學(xué)教學(xué)實(shí)習(xí)船“育鯤輪”。本節(jié)考慮航海仿真條件給出了基于“育鯤輪”的仿真測試結(jié)果,外界環(huán)境干擾等效為式(14)。

圖7表示旋回試驗(yàn)MATLAB仿真流程圖。
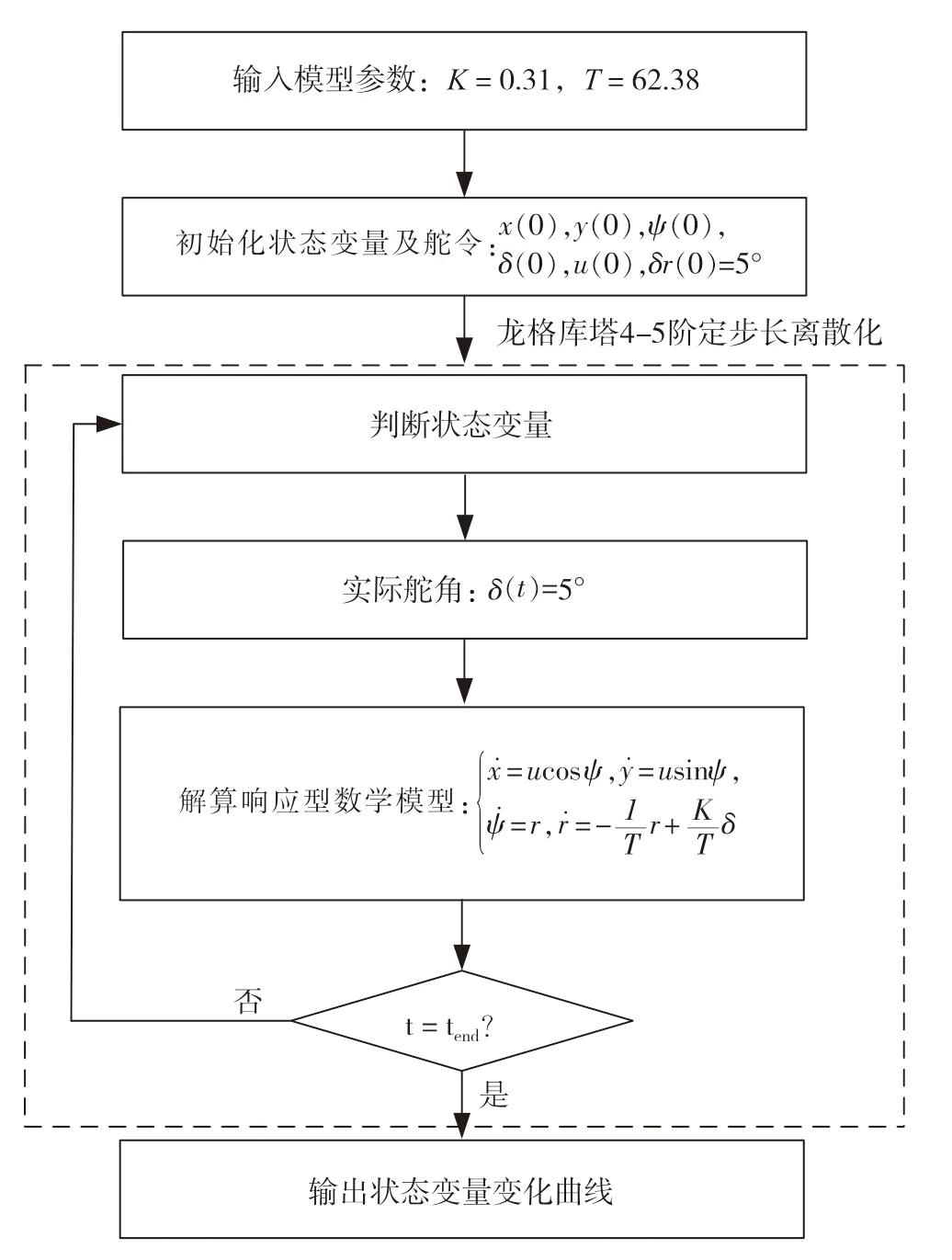
圖7 旋回試驗(yàn)MATLAB仿真流程圖
在船舶定速直航狀態(tài)下,當(dāng)轉(zhuǎn)舵角δ
= 5°
時(shí),圖8、圖9和圖10給出了船舶旋回運(yùn)動(dòng)的仿真結(jié)果。從圖8可以看出,航向ψ
、r
在200 s之內(nèi)非線性增大,在200 s之后,船舶進(jìn)入定常旋回階段,航向勻速增大到360°
,轉(zhuǎn)艏角速度穩(wěn)定在1.5°
/s。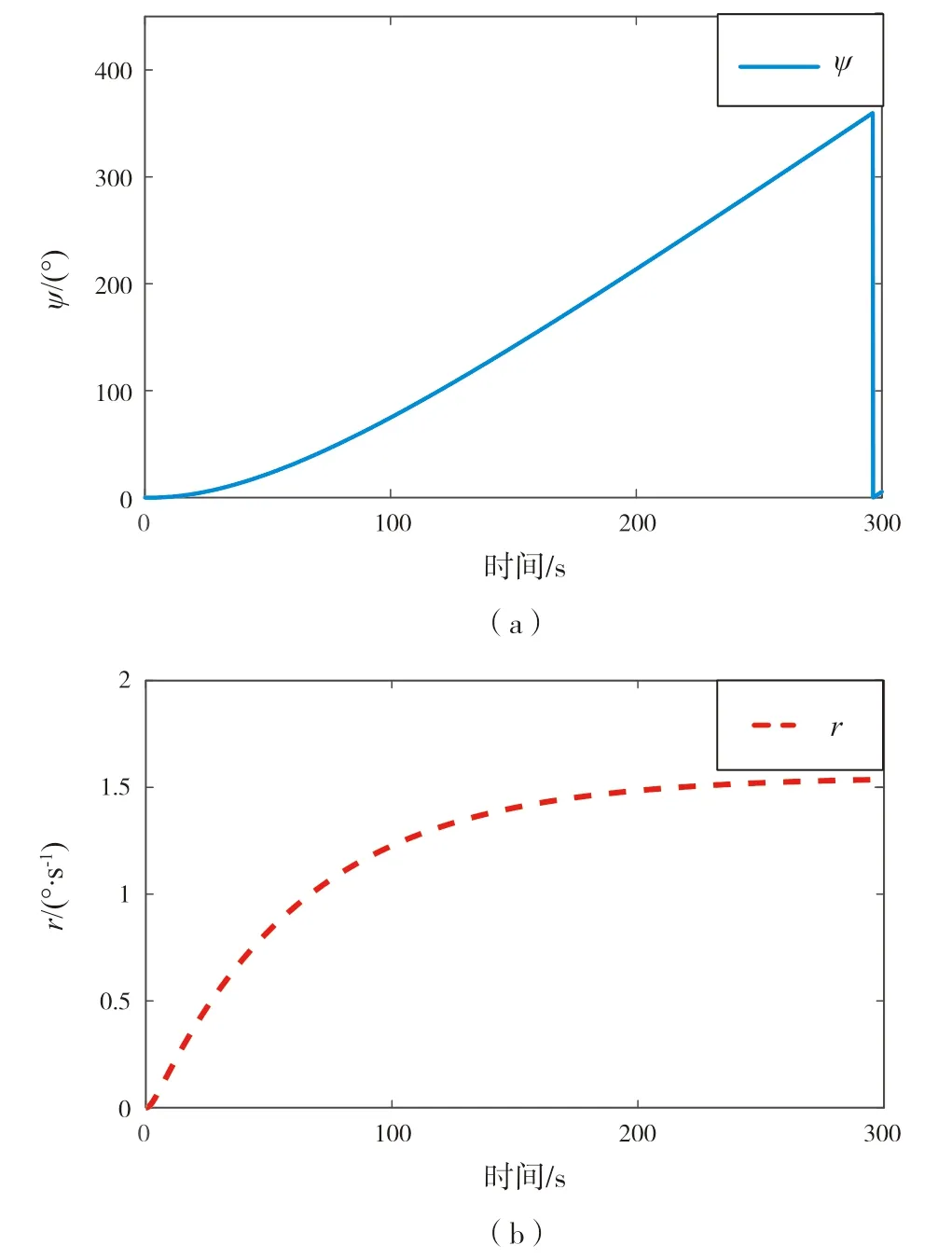
圖8 旋回試驗(yàn)r,ψ-t仿真曲線
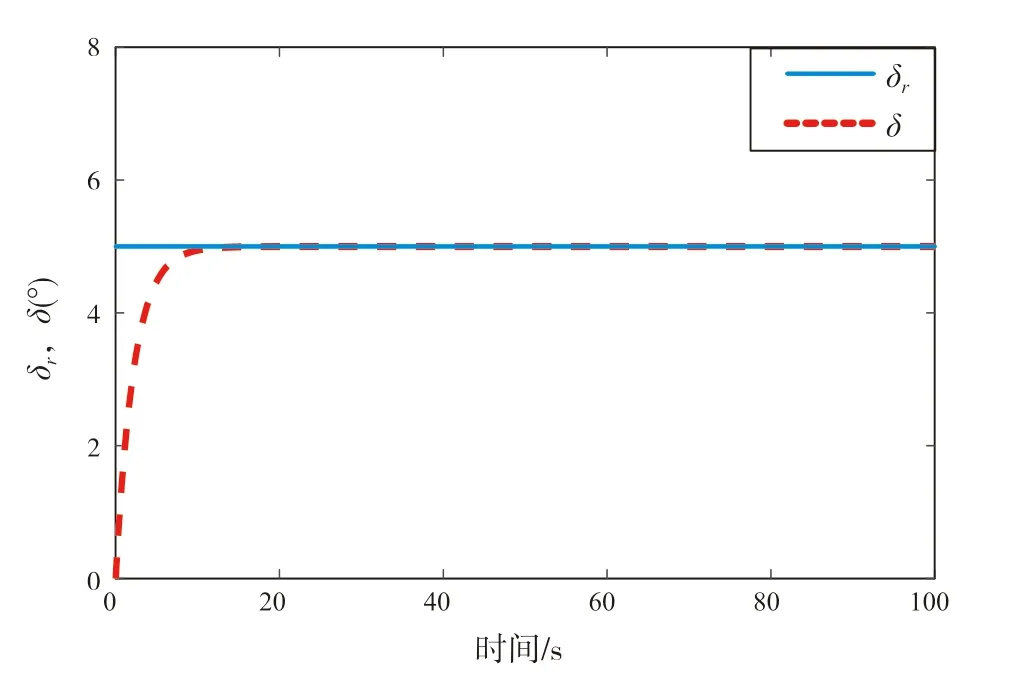
圖9 旋回試驗(yàn)δr,δ-t仿真曲線
圖9舵機(jī)伺服系統(tǒng)可以看出,命令舵角δ
與實(shí)際舵角δ
之間的關(guān)系:在初始一段時(shí)間內(nèi),實(shí)際舵角δ
非線性增大;在15 s后,實(shí)際舵角δ
與命令舵角δ
達(dá)到一致。圖10給出船舶旋回運(yùn)動(dòng)軌跡圖。當(dāng)命令右舷舵角5°
時(shí),船舶重心在縱軸方向發(fā)生移動(dòng),這段距離即圖注A
;此外,可見船舶旋回圈,而旋回圈直徑(D
)大小,將會(huì)反映定常旋回過程中占用水域的范圍。由圖10可見,旋回直徑約是實(shí)際船長的5倍左右。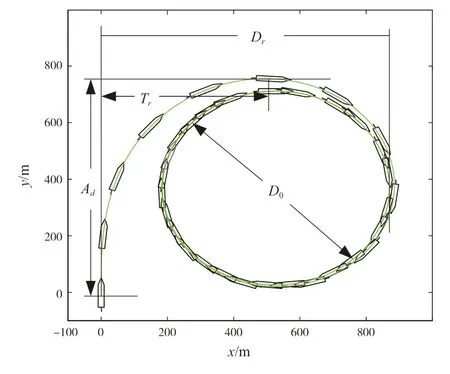
圖10 旋回試驗(yàn)船舶運(yùn)動(dòng)仿真軌跡圖
3 結(jié) 論
本文針對船舶旋回運(yùn)動(dòng)過程進(jìn)行研究,分析了旋回過程中的3個(gè)階段,并且針對旋回過程中的速降問題進(jìn)行深入分析,利用速降估算公式對“OPALIA”輪壓載狀態(tài)下的左滿舵與右滿舵旋回速降進(jìn)行預(yù)報(bào),并與實(shí)際速降曲線進(jìn)行對比,結(jié)果驗(yàn)證了速降估算公式的準(zhǔn)確性。最后,在模擬海洋干擾環(huán)境下,采用龍格庫塔4-5階定步長離散化的方法,對“育鯤”輪進(jìn)行MATLAB旋回仿真試驗(yàn)。仿真結(jié)果顯示,旋回直徑約為實(shí)際船長的5倍,這與實(shí)際工況相符,進(jìn)一步說明了仿真試驗(yàn)的有效性與準(zhǔn)確性。
本文尚存在以下不足:
(1) 船舶運(yùn)動(dòng)數(shù)學(xué)模型采用最簡潔的Nomoto模型,該模型存在不足;
(2) 船舶旋回速降影響因素較多,沒有確切的數(shù)學(xué)模型,因此,本文采用的速降估算公式尚存在一定誤差。
