基于SolidWorks的無(wú)人機(jī)起降平臺(tái)設(shè)計(jì)*
2021-04-29 03:22:28劉新超林振霞郁夢(mèng)婷孫維浩趙軍帥王凱任成昊王虓
科技與創(chuàng)新 2021年8期
劉新超,林振霞,郁夢(mèng)婷,孫維浩,趙軍帥,王凱,任成昊,王虓
基于SolidWorks的無(wú)人機(jī)起降平臺(tái)設(shè)計(jì)*
劉新超,林振霞,郁夢(mèng)婷,孫維浩,趙軍帥,王凱,任成昊,王虓
(山東理工大學(xué),山東 淄博 255000)
利用SoildWorks設(shè)計(jì)一種無(wú)人機(jī)起降平臺(tái),通過(guò)軟件三維建模功能建立各零部件模型和裝配體模型。平臺(tái)通過(guò)位置可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)結(jié)構(gòu)和電池更換結(jié)構(gòu)為基礎(chǔ),通過(guò)電路輔助,實(shí)現(xiàn)對(duì)無(wú)人機(jī)的承接,并通過(guò)容差式推送倉(cāng)與機(jī)械夾,對(duì)無(wú)人機(jī)更換電池,從而實(shí)現(xiàn)無(wú)人機(jī)的長(zhǎng)時(shí)間續(xù)航。
SolidWorks;三維建模;無(wú)人機(jī)起降平臺(tái);續(xù)航力
1 引言
1.1 軟件簡(jiǎn)介
SoildWorks是基于Windows操作系統(tǒng)推出的一套三維機(jī)械零件設(shè)計(jì)自動(dòng)化軟件。通過(guò)SolidWorks將三維零件進(jìn)行裝配,可動(dòng)態(tài)查看裝配體所有方向自由運(yùn)動(dòng),并可以對(duì)零部件進(jìn)行動(dòng)態(tài)的干涉和間隙檢查。SoildWorks憑借功能強(qiáng)大、參數(shù)特征造型、適配附件多的特點(diǎn)成為工業(yè)設(shè)計(jì)領(lǐng)域最常用的軟件。本文將應(yīng)用SolidWorks軟件,對(duì)無(wú)人機(jī)起降平臺(tái)進(jìn)行零件設(shè)計(jì)、裝配、干涉檢查和運(yùn)動(dòng)仿真分析。
1.2 設(shè)計(jì)背景
隨著無(wú)人機(jī)持有量逐漸增多、應(yīng)用領(lǐng)域的不斷擴(kuò)大,人工降落誤操作帶來(lái)的墜機(jī)事故也時(shí)有發(fā)生。據(jù)統(tǒng)計(jì),2019年至今山東省內(nèi)超過(guò)60%的無(wú)人機(jī)墜機(jī)事故發(fā)生在起飛和降落階段。當(dāng)無(wú)人機(jī)預(yù)降落時(shí),由于風(fēng)力與儀器等因素影響,無(wú)人機(jī)的姿態(tài)和位置信息發(fā)生偏移,并且野外路面情況復(fù)雜,無(wú)法為無(wú)人機(jī)的降落提供理想場(chǎng)地。同時(shí)無(wú)人機(jī)自身負(fù)重及傳感器作用電量損耗大而導(dǎo)致需頻繁性降落進(jìn)行電池更換。
1.3 解決思路
利用SolidWorks設(shè)計(jì)一款無(wú)人機(jī)起降平臺(tái),通過(guò)多尺度目標(biāo)全景攝像頭觀測(cè)與人工遙控承接平臺(tái)輔助升降,借自動(dòng)更換電池設(shè)計(jì)對(duì)無(wú)人機(jī)進(jìn)行電池更換,從而向野外作業(yè)的無(wú)人機(jī)提供平坦降落面以及有效解決電池續(xù)航力問(wèn)題。
2 設(shè)計(jì)原理
2.1 機(jī)械設(shè)計(jì)
本文以大疆悟INSPIRE2系列為研究對(duì)象進(jìn)行研究設(shè)計(jì)。為實(shí)現(xiàn)無(wú)人機(jī)安全承接與電池更換等功能,主要從位置可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)結(jié)構(gòu)與電池更換結(jié)構(gòu)兩大設(shè)計(jì)出發(fā)。
大疆悟INSPIRE2型號(hào)無(wú)人機(jī)相關(guān)參數(shù)如表1所示。
表1 大疆悟INSPIRE2型號(hào)無(wú)人機(jī)相關(guān)參數(shù)
飛行器型號(hào)最大起飛質(zhì)量/g軸距/mm槳距/mm最大下降速度/(m·s-1)最大可承受風(fēng)速/(m·s-1)電池整體質(zhì)量/g電池型號(hào) 大疆悟INSPIRE24 000 605(不含槳,降落模式)127 4 10 515 TB50
由以上參數(shù)與官方資料可得,在不安裝螺旋槳的情況下軸距為605 mm、長(zhǎng)42.7 cm、高31.7 cm、寬42.5 cm。對(duì)此以半徑為30 cm的圓形平面為承接面。同時(shí)為了穩(wěn)定無(wú)人機(jī),增設(shè)2個(gè)機(jī)械夾,以便對(duì)降落下的無(wú)人機(jī)的位置進(jìn)行固定。機(jī)械夾由1個(gè)舵機(jī)、1個(gè)底盤、2個(gè)半齒輪、2個(gè)夾子和4個(gè)杠桿組成。舵機(jī)逆時(shí)針轉(zhuǎn)動(dòng)帶動(dòng)2個(gè)齒輪逆時(shí)針旋轉(zhuǎn),起緊夾作用,而舵機(jī)順時(shí)針轉(zhuǎn)動(dòng)帶動(dòng)2個(gè)齒輪順時(shí)針旋轉(zhuǎn),起松夾作用。
機(jī)械夾模型如圖1所示。
因無(wú)人機(jī)最大質(zhì)量為4 000 g,所以需采用太空鋁鑄件做支柱。通過(guò)支柱,使承接面與承接平臺(tái)運(yùn)動(dòng)結(jié)構(gòu)連接。承接面與連接支柱模型如圖2所示。
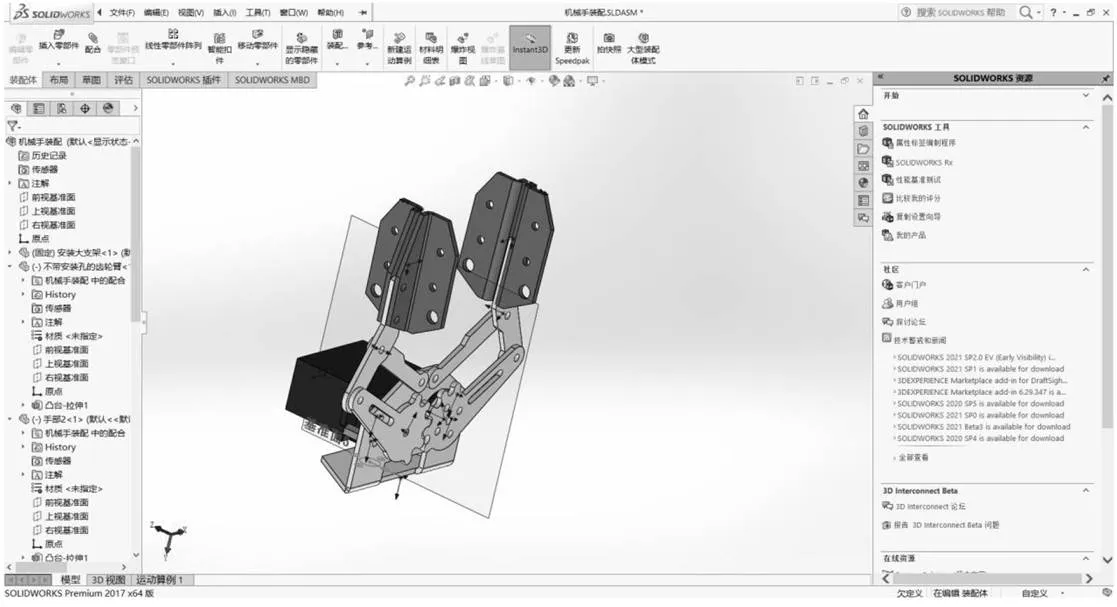
圖1 機(jī)械夾模型圖
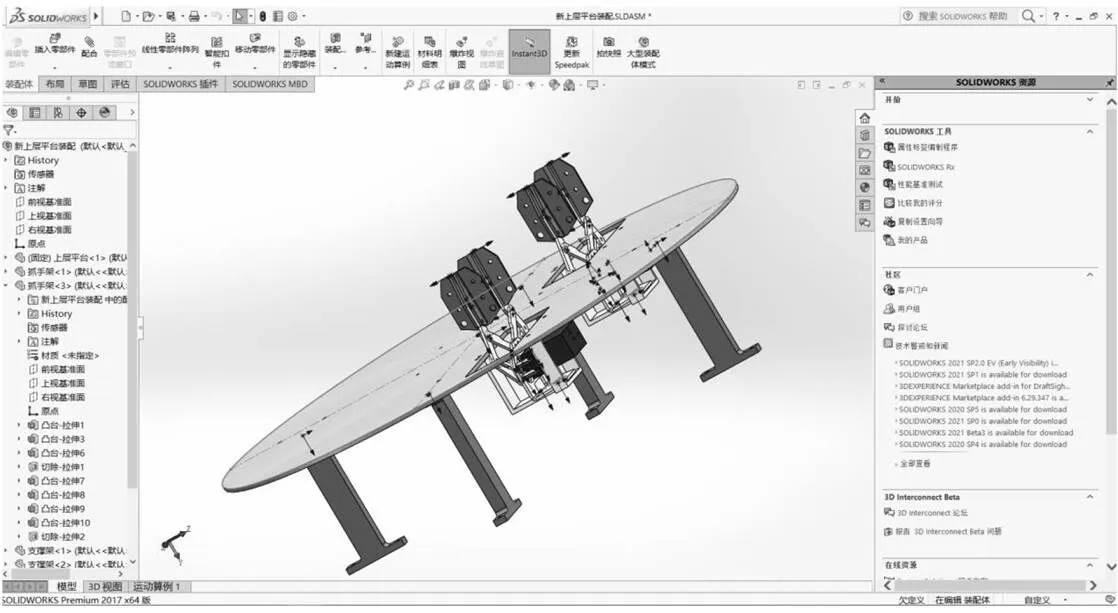
圖2 承接面與連接支柱模型圖
因無(wú)人機(jī)自動(dòng)降落過(guò)程受風(fēng)力與儀器的影響,會(huì)發(fā)生位置偏移,對(duì)此需使用位置可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)進(jìn)行實(shí)時(shí)承接。
位置可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)設(shè)計(jì)如下:選用大疆M3508 P19直流無(wú)刷電機(jī)作為驅(qū)動(dòng)電機(jī),通過(guò)C620無(wú)刷電機(jī)調(diào)速器控制轉(zhuǎn)動(dòng)。將3508電機(jī)a水平放置帶動(dòng)平臺(tái)軸方向移動(dòng),3508電機(jī)b豎直放置帶動(dòng)平臺(tái)軸方向移動(dòng),運(yùn)行方式簡(jiǎn)單且穩(wěn)定。承接平臺(tái)通過(guò)3508電機(jī)的轉(zhuǎn)動(dòng),可以很容易地進(jìn)行方向控制和跟蹤,3508電機(jī)根據(jù)控制終端指令,快速執(zhí)行運(yùn)動(dòng)。承接平臺(tái)運(yùn)動(dòng)結(jié)構(gòu)如圖3所示。
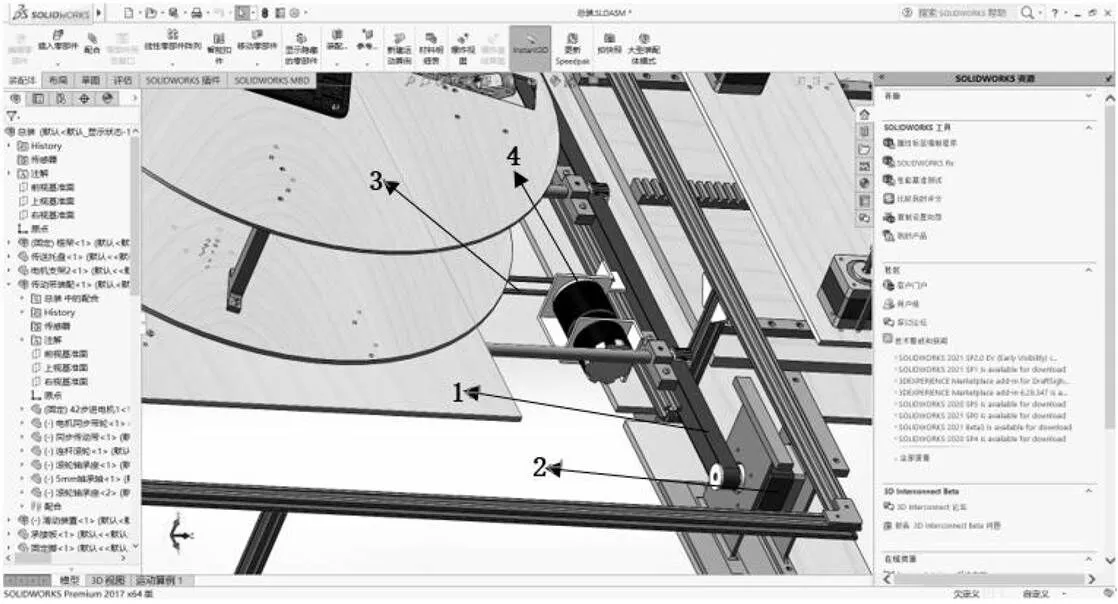
1—x軸聯(lián)動(dòng)履帶;2—x軸驅(qū)動(dòng)電機(jī);3—y軸聯(lián)動(dòng)履帶;4—y軸驅(qū)動(dòng)電機(jī)。
具體運(yùn)動(dòng)方案如下。
以承接平臺(tái)為原點(diǎn)建立-二維平面坐標(biāo)系,如圖4所示。因無(wú)人機(jī)降落過(guò)程受風(fēng)力、儀器等影響發(fā)生偏移,執(zhí)行人員通過(guò)承接平臺(tái)上的攝像頭反饋的視頻中無(wú)人機(jī)飛行位置對(duì)承接平臺(tái)進(jìn)行遙控,調(diào)整承接平臺(tái)位置,以實(shí)現(xiàn)無(wú)人機(jī)安全降落至承接平臺(tái)表面。例如,當(dāng)無(wú)人機(jī)位于承接平臺(tái)左上方時(shí),承接平臺(tái)先以軸方向移動(dòng)至與無(wú)人機(jī)同一縱軸方位,再以軸方向移動(dòng)至無(wú)人機(jī)正下方。
由長(zhǎng)100 cm、寬100 cm的太空鋁框架做可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)整體高度支撐。可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)結(jié)構(gòu)模型如圖5所示。
針對(duì)機(jī)械滑軌滑動(dòng)存在誤差問(wèn)題,改變現(xiàn)有對(duì)接倉(cāng)結(jié)構(gòu)設(shè)計(jì),將直面式對(duì)接設(shè)計(jì)優(yōu)化為曲面式對(duì)接倉(cāng)。經(jīng)初代產(chǎn)品的大量實(shí)物實(shí)驗(yàn),發(fā)現(xiàn)電池在取送過(guò)程中仍存在對(duì)接誤差(因機(jī)械帶動(dòng)式移動(dòng)),而實(shí)物要求機(jī)械夾必須與無(wú)人機(jī)電池倉(cāng)位置完美匹合,為解決以上問(wèn)題,運(yùn)用下面一種新的連接方法。
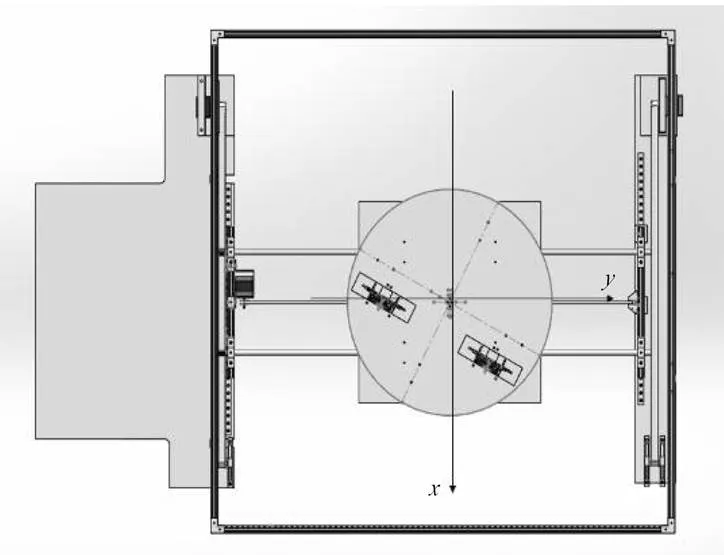
圖4 承接平臺(tái)二維坐標(biāo)建立
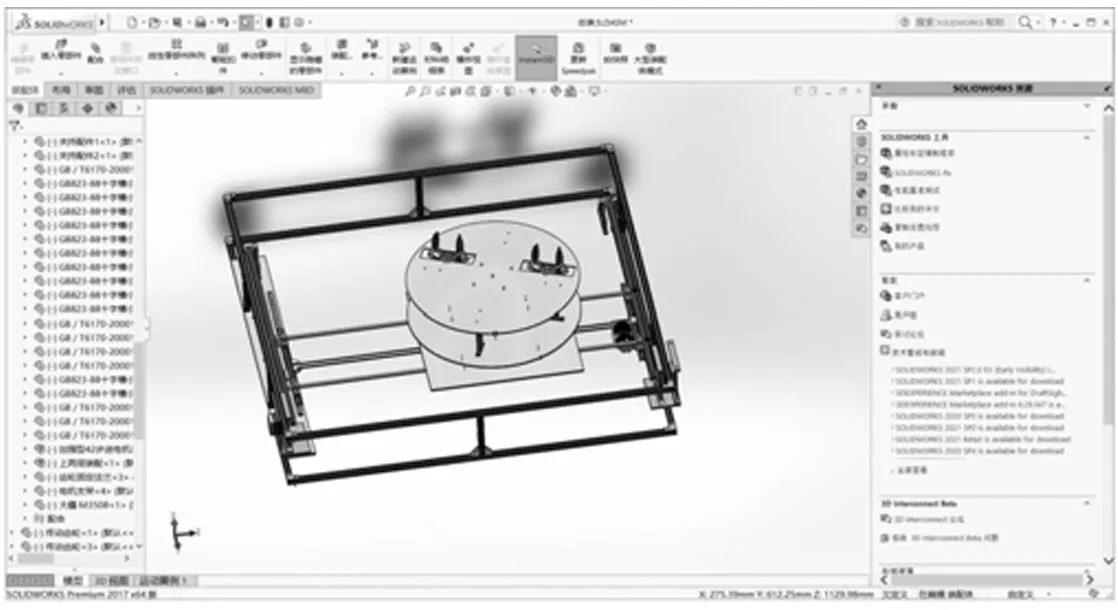
圖5 可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)結(jié)構(gòu)模型圖
推送倉(cāng)與推送桿通過(guò)軸承連接并于兩者下方裝有彈簧彈性連接,使推送倉(cāng)具有靈活擺動(dòng)性。在無(wú)人機(jī)電池倉(cāng)固定情況下,借助無(wú)人機(jī)電池倉(cāng)對(duì)容差式推送倉(cāng)的反向力帶動(dòng)彈簧的靈活擺動(dòng),實(shí)現(xiàn)推送倉(cāng)與無(wú)人機(jī)電池倉(cāng)自由對(duì)接位置匹合。容差式推送倉(cāng)模型如圖6所示。
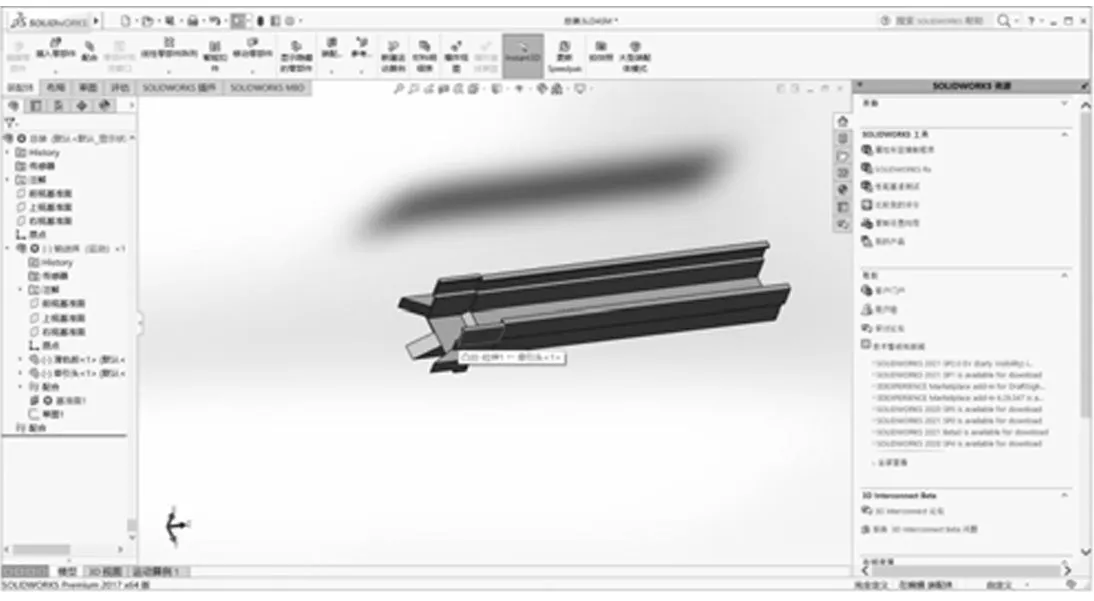
圖6 容差式推送倉(cāng)模型圖
秉持“最簡(jiǎn)”理念,提出三維連體式電池倉(cāng)設(shè)計(jì)結(jié)構(gòu),如圖7所示。新舊電池倉(cāng)在同一位置的設(shè)計(jì)使得電池夾路徑精簡(jiǎn)。當(dāng)舊電池放入舊電池倉(cāng)后,通過(guò)電機(jī)的帶動(dòng),新電池倉(cāng)代替舊電池倉(cāng),可使機(jī)械夾直接將新電池推送至無(wú)人機(jī)電池殼內(nèi)。
具體運(yùn)動(dòng)方案如下。
當(dāng)承接平臺(tái)位置回歸過(guò)程結(jié)束時(shí),電池更換結(jié)構(gòu)在電機(jī)帶動(dòng)下經(jīng)滑軌向無(wú)人機(jī)方向整體移動(dòng),容差式推送倉(cāng)與無(wú)人機(jī)電池倉(cāng)發(fā)生切合,推送桿在48式步進(jìn)電機(jī)帶動(dòng)下前移,電池夾夾住無(wú)人機(jī)電池,48式步進(jìn)電機(jī)反轉(zhuǎn)相同相位,舊電池被牽引至舊電池存儲(chǔ)倉(cāng),三維連體式電池倉(cāng)憑借直流減速電機(jī)與連接結(jié)構(gòu)左向移動(dòng),新電池倉(cāng)取代舊電池倉(cāng),推送桿重復(fù)電池推送過(guò)程,新電池進(jìn)入無(wú)人機(jī)電池倉(cāng),推送桿回到原位置,電池更換結(jié)構(gòu)歸位,無(wú)人機(jī)放飛。電池更換結(jié)構(gòu)模型如圖8所示。
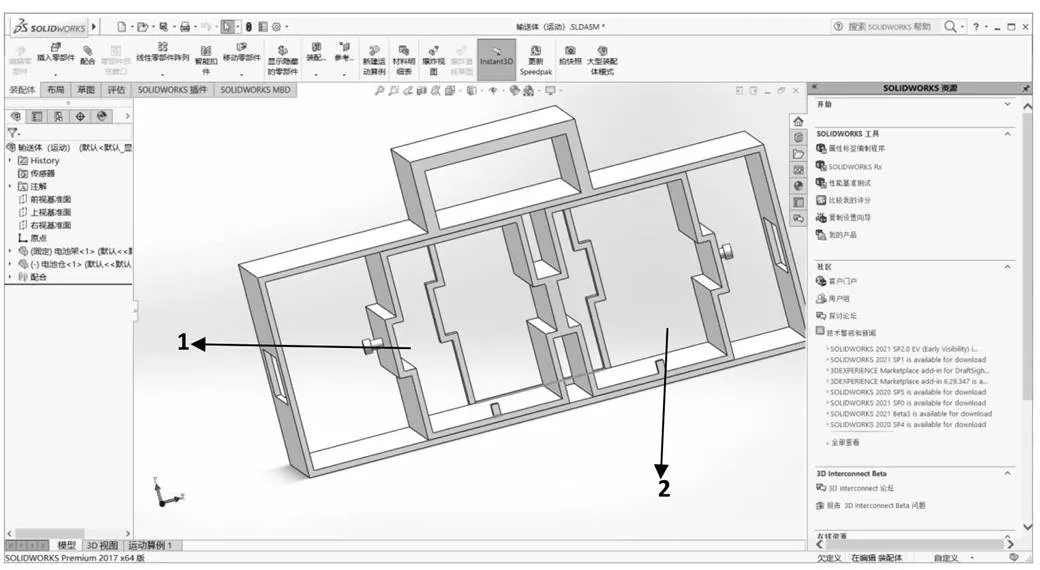
1—新電池倉(cāng);2—舊電池倉(cāng)。
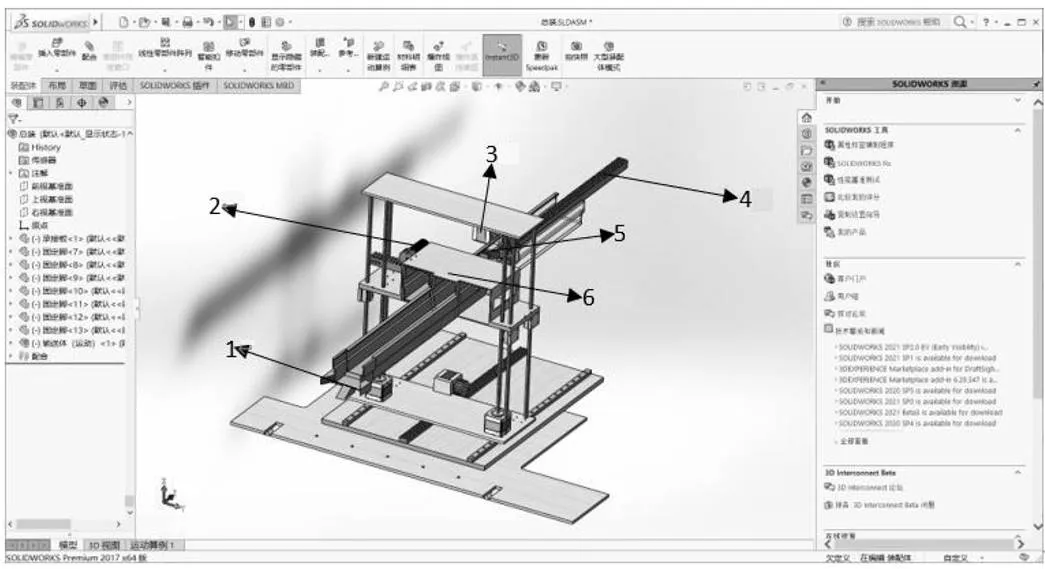
1—容差式推送倉(cāng);2—直流減速電機(jī);3—48步進(jìn)電機(jī);4—推送桿;5—電池夾;6—三維連體式電池倉(cāng)。
至此,無(wú)人機(jī)起降平臺(tái)機(jī)械設(shè)計(jì)完成,如圖9所示。
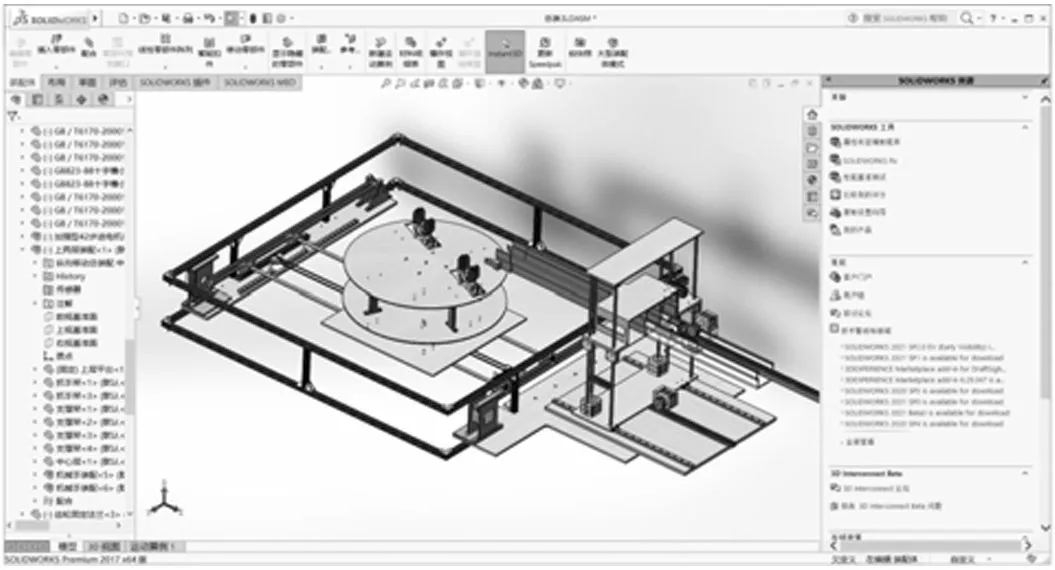
圖9 無(wú)人機(jī)起降平臺(tái)模型圖
2.2 電路補(bǔ)充
為了實(shí)現(xiàn)起降平臺(tái)整體運(yùn)行,還需進(jìn)行簡(jiǎn)單的電路補(bǔ)充。無(wú)人機(jī)起降平臺(tái)整體流程如圖10所示。
承接平臺(tái)邊緣夾持有小蟻攝像頭SIM卡數(shù)據(jù)聯(lián)網(wǎng)實(shí)時(shí)采集無(wú)人機(jī)位置,以便操作人員對(duì)承接平臺(tái)位置遙控。采用2.4 g天地飛遙控器與STM32F103ZET6系列單片機(jī)做承接平臺(tái)運(yùn)動(dòng)控制硬件。
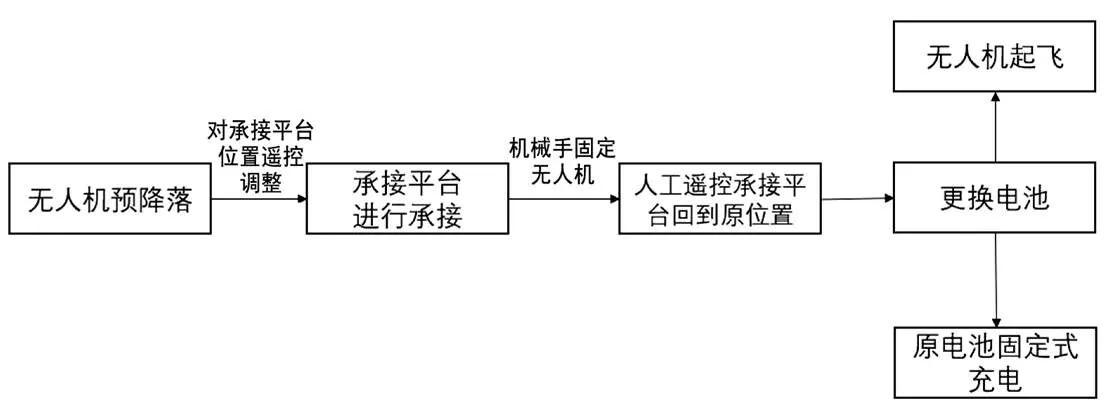
圖10 無(wú)人機(jī)起降平臺(tái)整體流程圖
STM32F103ZET6單片機(jī)作為承接平臺(tái)主控板,同時(shí)控制2個(gè)無(wú)刷電機(jī)調(diào)速器。采用C620無(wú)刷電機(jī)調(diào)速器驅(qū)動(dòng)大疆M3508 P19直流無(wú)刷電機(jī)精確轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)承接平臺(tái)-二維平面運(yùn)動(dòng)。整體采用閉環(huán)控制,精確控制電機(jī)轉(zhuǎn)速達(dá)到運(yùn)動(dòng)所需的V1、V2,或者轉(zhuǎn)動(dòng)一個(gè)固定的角度。
電池更換結(jié)構(gòu)以STM32F407為主控芯片,通過(guò)控制一個(gè)42步進(jìn)電機(jī)、一個(gè)直流無(wú)刷電機(jī)與一個(gè)舵機(jī)完成電池更換具體方案。
3 實(shí)物測(cè)試
無(wú)人機(jī)起降平臺(tái)實(shí)物模型如圖11所示。容差式推送倉(cāng)3D打印部件實(shí)物如圖12所示。
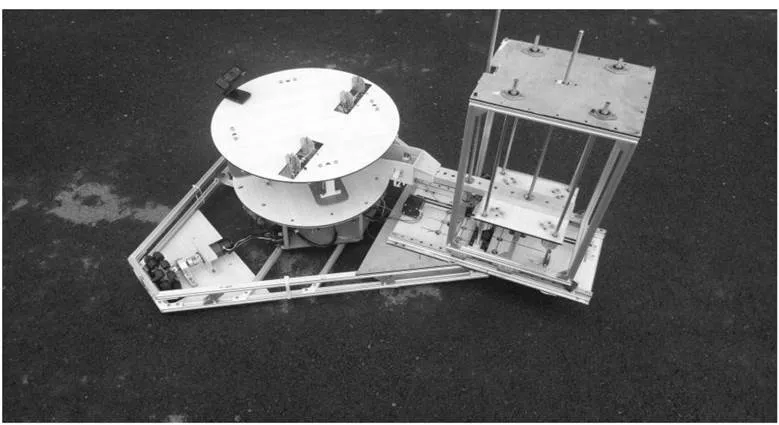
圖11 無(wú)人機(jī)起降平臺(tái)實(shí)物模型圖
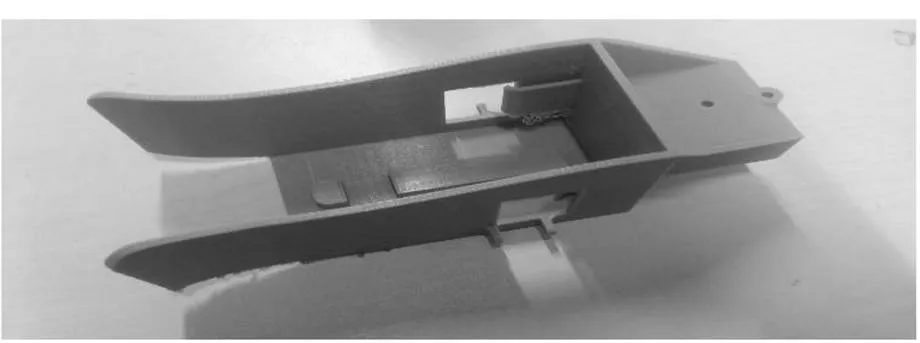
圖12 容差式推送倉(cāng)3D打印部件實(shí)物圖
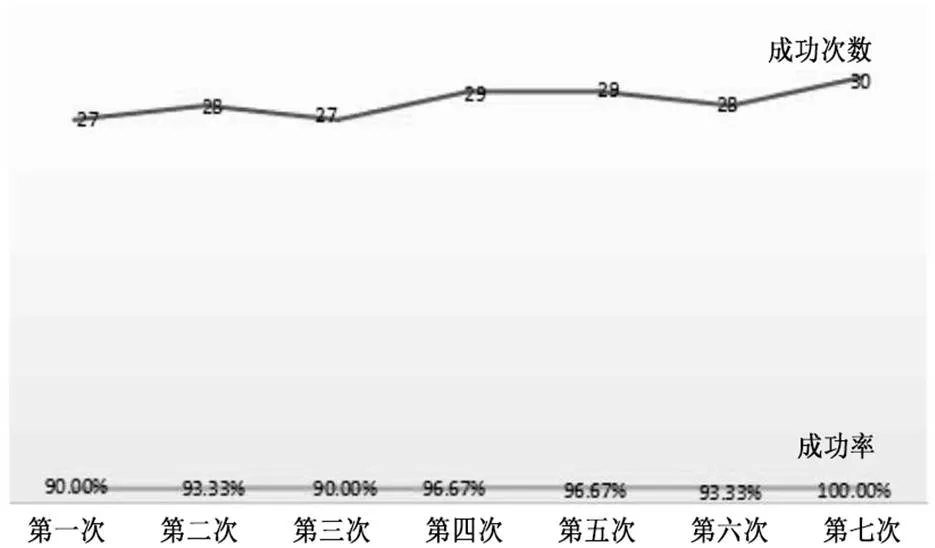
無(wú)人機(jī)降落時(shí)因受儀器、風(fēng)速影響精確度達(dá)不到對(duì)接要求,糾偏設(shè)計(jì)以全方位、多角度移動(dòng)來(lái)彌補(bǔ)降落偏差的缺陷。在200余次的降落測(cè)試中,降落在平臺(tái)有效位置的成功率高達(dá)94%。在198次的成功降落中,在夾持機(jī)構(gòu)有效范圍內(nèi)的次數(shù)高達(dá)195次。降落測(cè)試數(shù)據(jù)如圖13所示。
在50次速度測(cè)試中,平均耗時(shí)保持在1 min45 s之內(nèi)。
4 結(jié)論
基于SolidWorks的無(wú)人機(jī)起降平臺(tái)是以位置可調(diào)節(jié)式無(wú)人機(jī)承接平臺(tái)結(jié)構(gòu)與電池更換結(jié)構(gòu)為設(shè)計(jì)核心,借助SolidWorks構(gòu)建無(wú)人機(jī)起降平臺(tái)的模型。采用太空鋁鑄件做支柱,有效解決承載能力弱的問(wèn)題。根據(jù)無(wú)人機(jī)承接平臺(tái)搭載的攝像頭所反饋的無(wú)人機(jī)實(shí)時(shí)飛行位置對(duì)承接平臺(tái)進(jìn)行遙控,調(diào)整承接平臺(tái)位置,以實(shí)現(xiàn)無(wú)人機(jī)安全降落至承接平臺(tái)表面。推送倉(cāng)與推送桿通過(guò)軸承連接并于兩者下方裝有彈簧彈性連接,實(shí)現(xiàn)推送倉(cāng)與無(wú)人機(jī)電池殼有阻尼對(duì)接。三維連體式電池倉(cāng)中新電池倉(cāng)借助直流減速電機(jī)運(yùn)動(dòng)代替舊電池倉(cāng),對(duì)快速更換電池起到至關(guān)作用。本設(shè)計(jì)可以解決現(xiàn)有無(wú)人機(jī)野外起降以及連續(xù)工作時(shí)存在的續(xù)航時(shí)間短的難題。
[1]張健.復(fù)合翼垂直起降無(wú)人機(jī)飛行控制技術(shù)研究[D].廈門:廈門大學(xué),2018.
[2]梁月計(jì),郭海斌,吳曉濱.可伸縮型無(wú)人機(jī)升降平臺(tái)的研制[J].科技經(jīng)濟(jì)導(dǎo)刊,2018,26(27):81.
[3]李鵬波,張長(zhǎng)偉,薛雪.輕型剪叉式升降平臺(tái)結(jié)構(gòu)分析與優(yōu)化設(shè)計(jì)[J].建設(shè)機(jī)械技術(shù)與管理,2015(8):88-90.
[4]康立鵬.基于視覺(jué)導(dǎo)航的小型旋翼無(wú)人機(jī)目標(biāo)識(shí)別自主降落系統(tǒng)研究[D].呼和浩特:內(nèi)蒙古工業(yè)大學(xué),2020.
[5]SHARP C S,SHAKERNIA O,SASTRY S S. A vision system for landing an unmanned aerial vehicle[C]//IEEE international conference on robotics &automation,2003.
[6]XU G,ZHANG Y,JI S,et al. Research on computer vision-based for UAV autonomous landing on a ship[J]. Pattern recognition letters,2009,30(6):600-605.
[7]嵇盛育,徐貴力,馮文玲.基于紅外視覺(jué)的無(wú)人機(jī)自主著艦合作目標(biāo)的研究[J].紅外技術(shù),2007,29(10):593-597.
[8]魏祥灰.著陸區(qū)域視覺(jué)檢測(cè)及無(wú)人機(jī)自主著陸導(dǎo)引研究[D].南京:南京航空航天大學(xué),2019.
V279
A
10.15913/j.cnki.kjycx.2021.08.008
2095-6835(2021)08-0025-04
劉新超(2000—),男,本科在讀,學(xué)生,主要研究方向?yàn)殡娏ο到y(tǒng)巡檢全自動(dòng)化技術(shù)。
*國(guó)家級(jí)大學(xué)生創(chuàng)新創(chuàng)業(yè)項(xiàng)目(編號(hào):S202010433005)
〔編輯:王霞〕
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 科技與創(chuàng)新的其它文章
- FME在空間數(shù)據(jù)批處理中的應(yīng)用分析——以第三次全國(guó)國(guó)土調(diào)查為例
- 大數(shù)據(jù)時(shí)代背景下人工智能在計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)中的應(yīng)用探索
- “3D大賽”在高職機(jī)械類專業(yè)學(xué)生創(chuàng)新能力培養(yǎng)中的應(yīng)用*
- 面條圖在產(chǎn)線持續(xù)改進(jìn)上的應(yīng)用
- 信息類專業(yè)大學(xué)生科技活動(dòng)的系統(tǒng)性規(guī)劃*
- 關(guān)于單車“反騎機(jī)制”解決潮汐現(xiàn)象