一種適用于多極旋變的高精度編碼器跳碼監測評估方法
2021-04-30 07:25:12侯錦,王鵬
電子設計工程 2021年7期
侯 錦,王 鵬
(1.中國電子科技集團公司第39 研究所,陜西西安 710065;2.陜西省天線與控制技術重點實驗室,陜西 西安 710065)
利用多極旋轉變壓器作為角度傳感器的軸角編碼器廣泛應用于各種測控、遙測、遙感和通信天線,對于衛星測控、遙測接收和衛星通信軸角編碼器讀取多極旋變的精通道和粗通道的數據進行組合,獲得滿足測角精度要求及指向控制的高精度的角度數據[1-8]。
多極旋轉變壓器是一種獲得天線角度的傳感器設備,可以提供較高的角度分辨精度。軸角編碼器通過采集旋轉變壓器的返回信號,經過編碼芯片的解碼,組合不同通道的采樣值獲得天線運動軸上的絕對位置。它是天線系統實現控制和完成測角任務的重要設備。
角度跳碼是使用多極旋轉變壓器編碼經常遇到的問題,角度組合、安裝結構、旋變或者旋變編碼信號采集通路出現問題時均可觸發跳碼,此時設備處于故障狀態,不能進行角度閉環,對于遙測接收和衛星測控中的角度引導工作方式將不能工作,引起目標丟失、數據丟失,導致工作異常或任務失敗。由于缺乏對于角度編碼的監測,設備狀態惡化到一定程度才出現故障,角度跳碼常常作為一種突發故障,對于設備和任務影響大、危害大[9-12]。
1 多極旋變的高精度編碼原理
多極旋轉變壓器是由一對極旋轉變壓器組成的粗測量通道和P對多極旋轉變壓器組成的精測量通道組成,P值越大,極對數越多。高精度編碼器使用多極旋轉變壓器進行角度位置測量以提供高精度的編碼,為保證編碼精度,測控站多選擇64 極的旋變作為編碼感應器件。
以多極正余弦旋轉變壓器為測角元件,高精度編碼器使用RDC 轉換器實現正、余弦模擬電信號向數字信號的變換,根據數字化編碼位數精度匹配關系,獲得方位軸、俯仰軸位置角度編碼。
編碼過程為激磁信號發生電路的振蕩器經過功率放大器將輸出信號作旋變的激磁信號源,并通過調整電路給RDC 轉換電路作基準信號,RDC 器件將來自旋變的模擬信號轉換為二進制數字角度信號。單片機CPU 負責角度數據的處理,讀取的二進制數字角度原始信息,依據角度編碼規則(編碼角度范圍與采樣位數的對應關系)對二進制數據進行組合,分別得到系統內每個旋變對應的角度信息。最后通過數據總線將數據按照接口要求送至外部設備,如圖1所示。
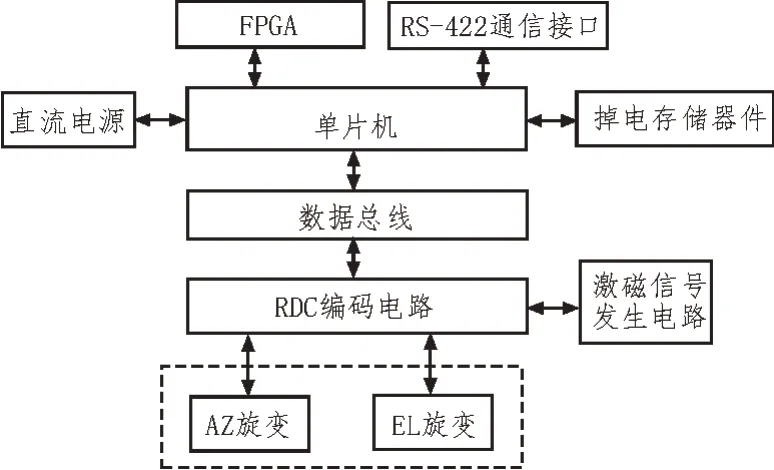
圖1 編碼器組成
為獲得滿足精度要求并提供測量坐標系內的角度值,在編碼的過程中需要進行粗碼和精碼的角度組合以及編碼零值校正。
角度組合模塊在每個控制周期中根據旋變極數和編碼精度要求將RDC 采樣編碼得到的二進制原始數據和對應的編碼位數要求,進行精粗通道的組合,形成覆蓋運動軸(如轉臺式天線的方位和俯仰軸)運行范圍的角度值。零值校正模塊根據初始化讀取的角度零值對編碼后的角度值進行角度標定的修正,得到滿足測量坐標系要求的系統軸系工作角度值。
以極對數為1∶64 的多極旋轉變壓器為例,粗通道為1 對極,精通道為64 對極,轉子在空間繞軸旋轉一周,定子繞組中的粗通道電勢則按正、余弦規律交變一周,而精通道的電勢則按正、余弦規律交變64 周,粗通道輸出電壓的有效值變化周期為360°,而精通道的輸出電壓有效值變化周期為360°/64=5.625°。
根據設備編碼精度需要和旋變極數,采樣RDC的二進制數與精粗角度產生對應關系,在此基礎上,對精粗數據進行組合,獲得需要的角度值。在組合的過程中,由于旋變安裝、傳輸線路等因素,精粗數據存在一定的不同步,這里稱之為相位差,當差值異常時將產生角度組合匹配異常,可引起跳碼。
2 多極旋變的編碼評估方法
根據前文的分析,精碼和粗碼的相位關系即相位差可作為跳碼實時監測的特征項,依據組合編碼的原理,相位差還可作為故障分析、狀態評估的特征項,系統通過采集角度數據的原始數據并根據其組合方式,對原始數據和相位差進行分析。通過對特征項的期望值和實際采集、計算數值之間作差生成殘差信號,并用殘差信號表征相對于標準運行狀態的偏差,基于此殘差即可對系統當前狀態進行判斷[9-14],如圖2 所示。
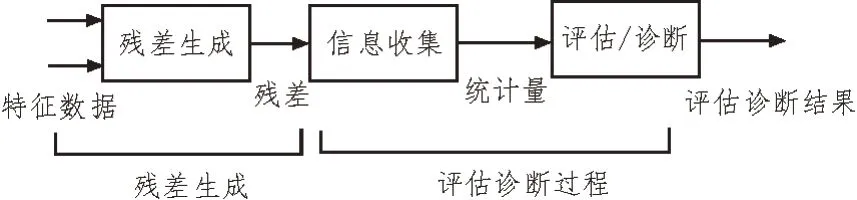
圖2 系統故障診斷、評估模式
跳碼評估預警方法主要功能為通過對旋變精、粗采樣編碼的原始數據進行處理和分析,在特征項相位差的基礎上結合編碼模型,獲得當前編碼的狀態,并根據數據變化的規律和趨勢,完成編碼、監測、評估和由相位匹配產生跳碼的預警。通過對測量計算產生的處理結果進行存儲,并在編碼過程中對測量數據分析形成數據變化的規律和趨勢,作為模型參數,經過模型和參數對比得出結果。測量數據在編碼器的掉電可存儲器件中進行存儲,以便于在編碼過程中進行讀取和分析比對。
對于設備首先需要以一個正常的狀態作為初始狀態,以此為基礎,對設備其后的運行狀態進行監測和評估。以64 極旋變為例,根據編碼精粗數據組合原理,360°被劃分為64 個編碼段,在每個編碼段內,粗碼角度與精碼角度值對應,并由精碼提供更高精度的編碼數值,可以取粗碼在64 個編碼段上的角度值,與精碼值比較,計算兩者的角度差,并將該值歸一化到以0~360°表示的相位值,這樣就計算出了粗碼對精碼的相位差。
在整個編碼范圍內測量并記錄Φ值,形成一組Φ(Φ1~Φn),Φ的采樣點數不少于編碼范圍對于5.625的整數倍,根據硬件設計提供的存儲空間確定采樣點數,提高采樣密度可增加分析評估對不同原因引起角度跳變的適應性。對整個Φ的數據隊列,根據Φ的最大值和最小值確定用于設備初始編碼的修正值Φ0,一般來說由于結構加工及安裝的不同心,產生的相位差為近似的正弦曲線,其曲線越平坦則表明同心度越好,鏈路相位的一致性較好,如圖3、圖4所示。

圖3 粗精相位差(方位支路)
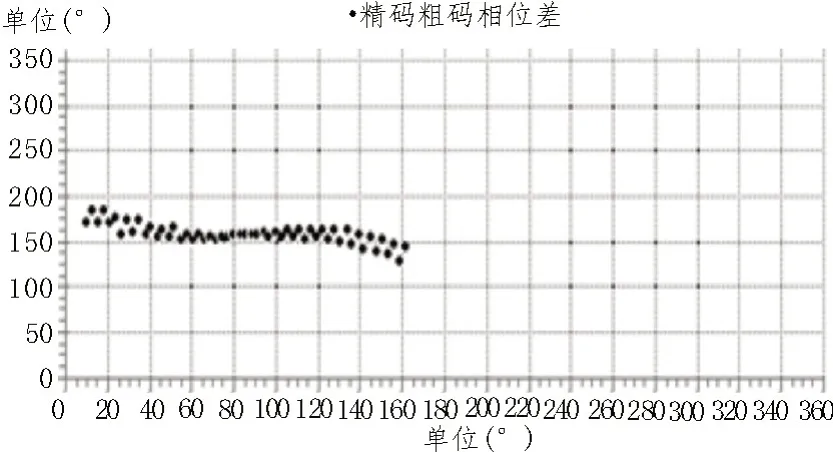
圖4 粗精相位差(俯仰支路)
在系統編碼測試和調試階段,一般會對精粗組合時的相位進行疊加數值修正,通過填入一個固定的Φ0,對精粗組合的角度進行整體修正,可使該曲線位于相位180°位置,使角度組合時上下相位處于裕度最大的位置,以使設備在初始狀態下在任意位置的角度組合滿足編碼規則不發生跳碼,并保證系統對于可能產生的結構變形、傳輸相位變化等問題具有最大的適應性,Φ0一般可取最大與最小值的均值。
如圖5 所示相位差不滿足組合要求,對其進行相位修正,疊加一個相位值使初始相位差滿足要求,如圖6 所示。
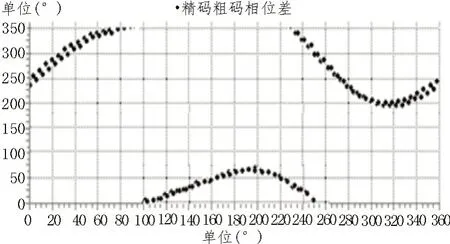
圖5 修正前粗精相位差(方位支路)
在此基礎上獲得修正Φ的數據隊列在編碼范圍(如方位為0~360°、俯仰為0~180°)角度上的相位差值Φi和角度值θi,作為設備評估的初始參考值,作為系統進行條碼監測、評估和預測的基礎數據進行記錄,在設備啟動時讀出并在設備運行編碼時進行實時相位計算并比對。

圖6 修正后粗精相位差(方位支路)
在設備運行時,根據讀取的實時數據計算當前精、粗采樣編碼的相位來對編碼原始信息進行實時監測和評估,當前精、粗采樣編碼的相位值Φj與初始記錄的Φ隊列進行數據擬合計算當前的理論相位差ΦT,計算兩者的差值,同時以ΦT作為基準計算可能產生跳碼的相位門限ΦΔ,最后借助精粗角度變化協助進行預警。考慮到編碼設備為小型化嵌入式系統,其計算和存儲有一定的限制,并且擬合精度不需要很高,保持在1 度的分辨率即可,因此擬合方法可采用常用的線性擬合,如下:

其中,Φ為相位差,θ為角度;可根據計算評估給出設備狀態:
1)健康:ΔΦ小于門限的20%;
2)正常:ΔΦ小于門限的80%,大于門限的20%;
3)異常:ΔΦ小于門限的100%,大于門限的80%;
4)故障:ΔΦ大于門限的100%。
3 工程應用和編碼器設計實現
由于結構變形、設備長時間運行、電纜短線或老化引起的跳碼均可在粗、精的相位差上表現出來。目前,這種方法已在包括二代導航在內的多套固定和車載測控、遙測設備上進行了測試驗證并開展了工程應用。這些設備的天線控制單元利用串行接口讀取編碼設備的粗支路和精支路的原始數據實現精粗數據組合,在對精粗通道的相位差進行計算和分析的基礎上,實現編碼狀態的實時監測、相位曲線的回執及修正值的確定。
通過該方法已診斷并解決了多類跳碼故障,在設備日常運行中對相位變化趨勢的持續監測,可有效對編碼跳碼進行評估和預警,并對突發的編碼跳碼故障進行報警和診斷。
通過在嵌入式高精度編碼器中集成該方法使常規的編碼器具備評估、預警和故障診斷的能力,利于系統實現該部件的狀態監測和故障預警等健康管理功能;同時利用編碼器對外的數字接口,向外部設備上報相關的評估預測信息,可支持上位機及遠程評估、預測和診斷[13-15],是天線系統實現健康管理功能的基礎。其主要硬件組成及軟件擴展如圖7 所示。

圖7 主要硬件組成及軟件擴展
在高精度編碼器設計時,可根據跳碼評估方法對數據處理的要求選擇掉電存儲器件的容量,以每度一點的記錄采集為例,360 點的相位存儲需要的容量約為720 Byte,在硬件設計上可利用現有參數存儲的掉電存儲數據接口按需擴展存儲容量。軟件監測與評估預警功能通過增加評估預警軟件模塊,在編碼周期中將相位基于模型的估算與實際計算進行比對,這樣在不改變原有高精度編碼器的硬件結構、不影響原有軟件功能和流程的前提下實現功能的快速部署[16-17]。
軟件在讀取精碼和粗碼的二進制數據組合成滿足精度要求的角度時,可在精粗碼組合前,增加一個模塊,用于計算精碼和粗碼的相位差,并與初始的正常相位進行比對來實現在編碼器工作過程中實時進行角度跳碼監測和預警,其工作流程見圖8,模塊可生成編碼狀態標志,可作為編碼狀態的一部分向外部輸出。標志為報警時,由天線控制單元根據標志決定采取哪些保護措施;當輸出為角度可用時,編碼器程序按照原有設計流程執行;在進行實時相位計算的過程中,還可根據編碼原理,對實際的編碼相位裕度進行比較和記錄,當裕度小于門限時,表明需要對該編碼支路上的旋變、線路、結構件產生的相差進行調整并據此進行維護檢修[18-19]。
4 結束語
多極旋變的高精度編碼器的跳碼評估方法通過對編碼原始數據進行監測和分析,可以對設備當前的編碼狀態進行實時監測和評估,對故障進行隔離和定位,利用與預警門限的比判實現對可能發展為跳碼的故障進行預警,有效解決編碼器角度跳碼這一突發故障問題。
編碼設備使用者可以通過評估和預警數據,在日常運行中及時對設備進行檢查和維護,避免在任務或者日常運行中出現跳碼故障,實現設備預防性維修,適應當前設備使用和維護需求。針對多極旋變的高精度編碼器的跳碼評估方法用于高精度編碼器可保證編碼精度和原有各項功能、性能的前提下,解決編碼設備由于安裝不合格、長期運行、突發故障等導致的編碼器角度跳變問題,基于編碼原理、數據分析和故障模型,實現編碼監測和評估預警。為工程應用提供了一種低成本、易實現且高效的方案。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
設備管理與維修(2015年12期)2015-04-09 06:57:00
