結合速度和干擾觀測的船舶路徑跟蹤模型預測控制
2021-04-30 03:47:00李宗宣卜仁祥范藝
上海海事大學學報 2021年1期
李宗宣 卜仁祥 范藝

摘要:
針對船舶路徑跟蹤控制中的舵角需優化﹑舵幅和舵速受約束等問題,提出模型預測控制(model predictive control, MPC)算法。為處理系統高階狀態值不易測量以及環境干擾問題,設計高階非線性觀測器,同時對船速和包含模型不確定項和外界干擾的總未知項進行估計。以引入舵機響應系統的MMG模型作為預測模型,不僅能提高預測精度,而且更符合船舶運動控制的實際情況。仿真結果表明,所設計的控制器在風浪流時變干擾下仍能跟蹤參考路徑,舵角幅值小且其變化是光滑的,速度值和總未知項也均能被準確地逼近,驗證了所提算法的有效性。
關鍵詞:
船舶運動控制; 模型預測控制(MPC); 路徑跟蹤; 非線性觀測器
中圖分類號:? U664.82
文獻標志碼:? A
Model predictive control of ship path following combined
with velocity and disturbance observers
LI Zongxuan, BU Renxiang, FAN Yi
(Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
To solve the rudder angel optimization requirement, rudder amplitude constraint and rudder rate constraint in the ship path following control, a model predictive control (MPC) algorithm is proposed. To deal with the problem of high-order state values of the system? being not easy to? measure and environmental
disturbance, a high-order nonlinear observer is designed to estimate the ship velocity and the total unknown terms including model uncertainties and external disturbance. The MMG model with the rudder response system is used as the predictive model, which not only can improve the prediction accuracy, but also accords with the actual situation of ship motion control. The simulation results show that: the designed controller can follow the desired path under the time-varying disturbance of wind, wave and current; the rudder angle amplitude is small and its variation is smooth, and the velocity value and the total unknown terms can be accurately approximated, which verifies the effectiveness of the proposed algorithm.
Key words:
ship motion control; model predictive control (MPC); path following; nonlinear observer
收稿日期: 2020-03-19
修回日期: 2020-05-09
基金項目:
國家自然科學基金(51939001,61976033,51379026);遼寧省自然科學基金(20170540089)
作者簡介:
李宗宣(1996—),男,陜西眉縣人,碩士研究生,研究方向為船舶運動控制、模型預測控制,(E-mail)zongxuanli@126.com;
卜仁祥(1973—),男,遼寧岫巖人,副教授,二副,博士,研究方向為船舶運動控制、船舶非線性控制,
(E-mail)burenxiang@dlmu.edu.cn
0 引 言
欠驅動船舶路徑跟蹤是一個不考慮時間限制的控制領域問題[1]。為解決此問題,FOSSEN將視覺制導算法應用到船舶路徑跟蹤中[2],使船舶在實際可行的情況下實現參考路徑跟蹤。由于船速不易被直接測量,文獻[3]利用高增益狀態觀測器對船舶橫、縱向速度進行估計。文獻[4]為估計船速設計出線性觀測器,但線性觀測器對較小偏差的估計精度較低,而在估計較大偏差時系統會產生振蕩。為此,文獻[5]提出非線性增益速度觀測器。文獻[6]不僅利用狀態觀測器估計船速,而且設計擾動觀測器對外界干擾進行逼近。文獻[7]設計高增益狀態觀測器,對運動學中的時變干擾進行逼近。文獻[8]將以擴張狀態觀測器(extended state observer, ESO)為核心的自抗擾算法應用到路徑跟蹤中,減小外界干擾的影響。文獻[9]將ESO應用于船舶航向控制,解決模型不確定項和外界干擾問題。文獻[10]利用徑向基函數(radial basis function, RBF)神經網絡對模型不確定項進行逼近。文獻[11]結合RBF神經網絡設計滑模控制器,提高了對外界干擾的魯棒性。文獻[12]也基于RBF神經網絡設計自適應控制器,解決路徑跟蹤中存在的模型不確定項和外界干擾問題。文獻[13-14]設計出一種比RBF神經網絡運算量更小的最小學習參數神經網絡方法,可以有效地對未知部分或外界干擾進行逼近。除以上路徑跟蹤中存在的問題之外,對控制輸入的約束與優化也是不可忽視的,其直接關系到輸入機構能否正常運行以及能量損耗大小的問題。為解決輸入約束問題:文獻[15]在控制律中引入輔助系統;文獻[16]設計增量反饋滑模控制器,利用迭代滑模中的非線性函數避免輸入舵角飽和問題;文獻[17]利用在處理約束問題上具有獨特優勢的模型預測控制(model predictive control, MPC)算法,解決輸入幅值和增量約束的問題,但其所采用的線性預測模型在較大外界干擾下控制精度較低;文獻[18]以非線性Nomoto模型作為MPC模型,但與實際船舶運動特性相比,其精度仍較低。鑒于此,文獻[19]采用船舶MMG模型作為預測模型,并通過RBF神經網絡技術對模型中的干擾項進行逼近,提高了預測精度。然而,MPC算法中的每一步運算均需基于當前系統狀態值的反饋,而系統高階狀態值一般難以被直接測量。
參考以上研究成果,本文考慮船舶運動控制的實際情況和控制機構存在的延時問題,將引入了舵機響應系統的高精度船舶MMG模型作為MPC模型,并設計高階非線性觀測器,同時對船速、模型不確定項和外界干擾進行逼近。
1 船舶模型與控制目標
1.1 MMG模型
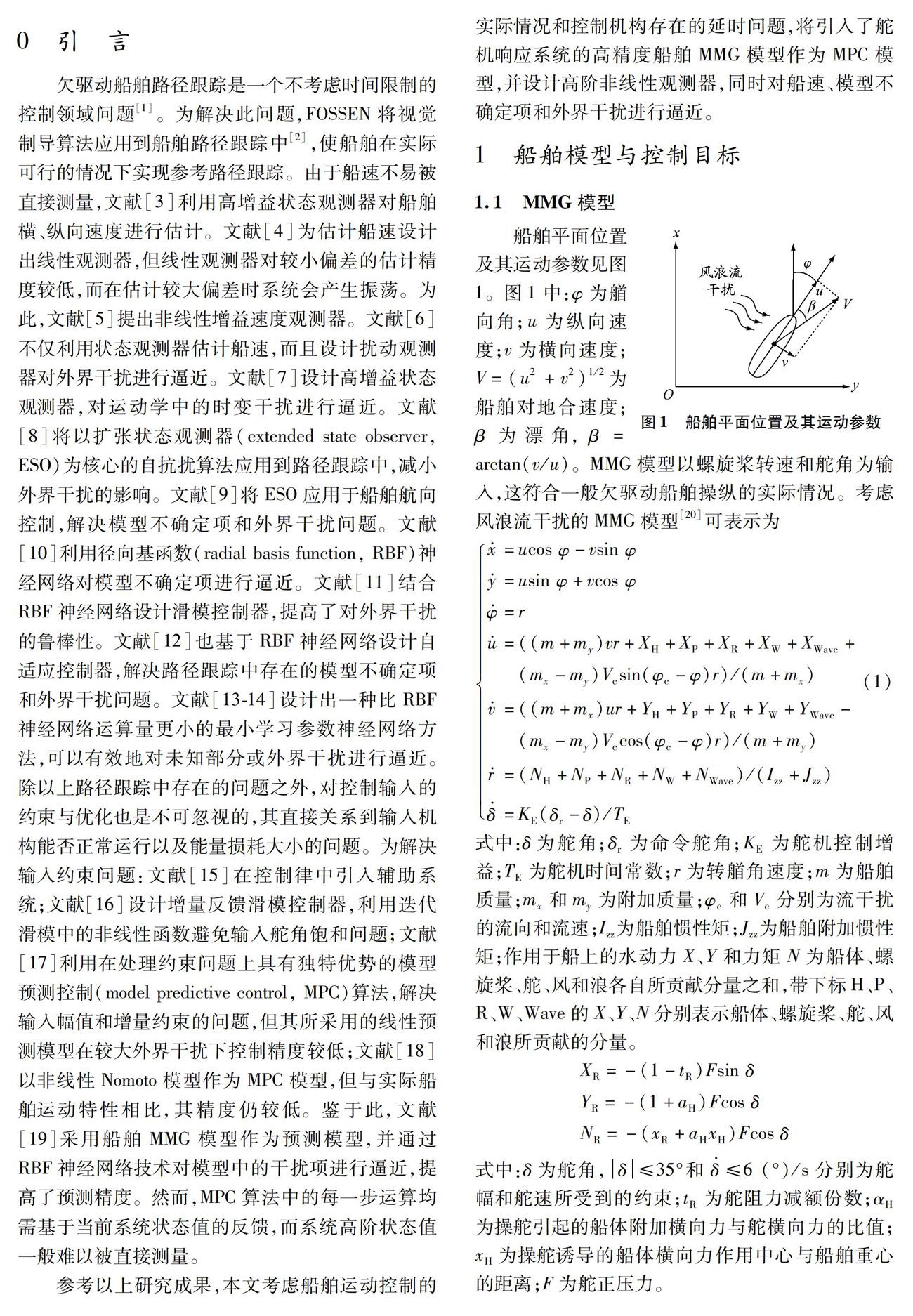
船舶平面位置及其運動參數見圖1。
圖1中:φ為艏向角;u為縱向速度;v為橫向速度;V=(u2+v2)1/2為船舶對地合速度;β為漂角,β=arctan(v/u)。MMG模型以螺旋槳轉速和舵角為輸入,這符合一般欠驅動船舶操縱的實際情況。考慮風浪流干擾的MMG模型[20]可表示為
式中:δ為舵角;δr為命令舵角;KE為舵機控制增益;TE為舵機時間常數;r為轉艏角速度;m為船舶質量;mx和my為附加質量;φc和Vc分別為流干擾的流向和流速;Izz為船舶慣性矩;Jzz為船舶附加慣性矩;作用于船上的水動力X、Y和力矩N為船體、螺旋槳、舵、風和浪各自所貢獻分量之和,帶下標
H、P、R、W、Wave的X、Y、N分別表示船體、螺旋槳、舵、風和浪所貢獻的分量。
式中:δ為舵角,δ≤35°和
δ·≤6 (°)/s分別為舵幅和舵速所受到的約束;tR為舵阻力減額份數;αH為操舵引起的船體附加橫向力與舵橫向力的比值;xH為操舵誘導的船體橫向力作用中心與船舶重心的距離;F為舵正壓力。
1.2 控制目標
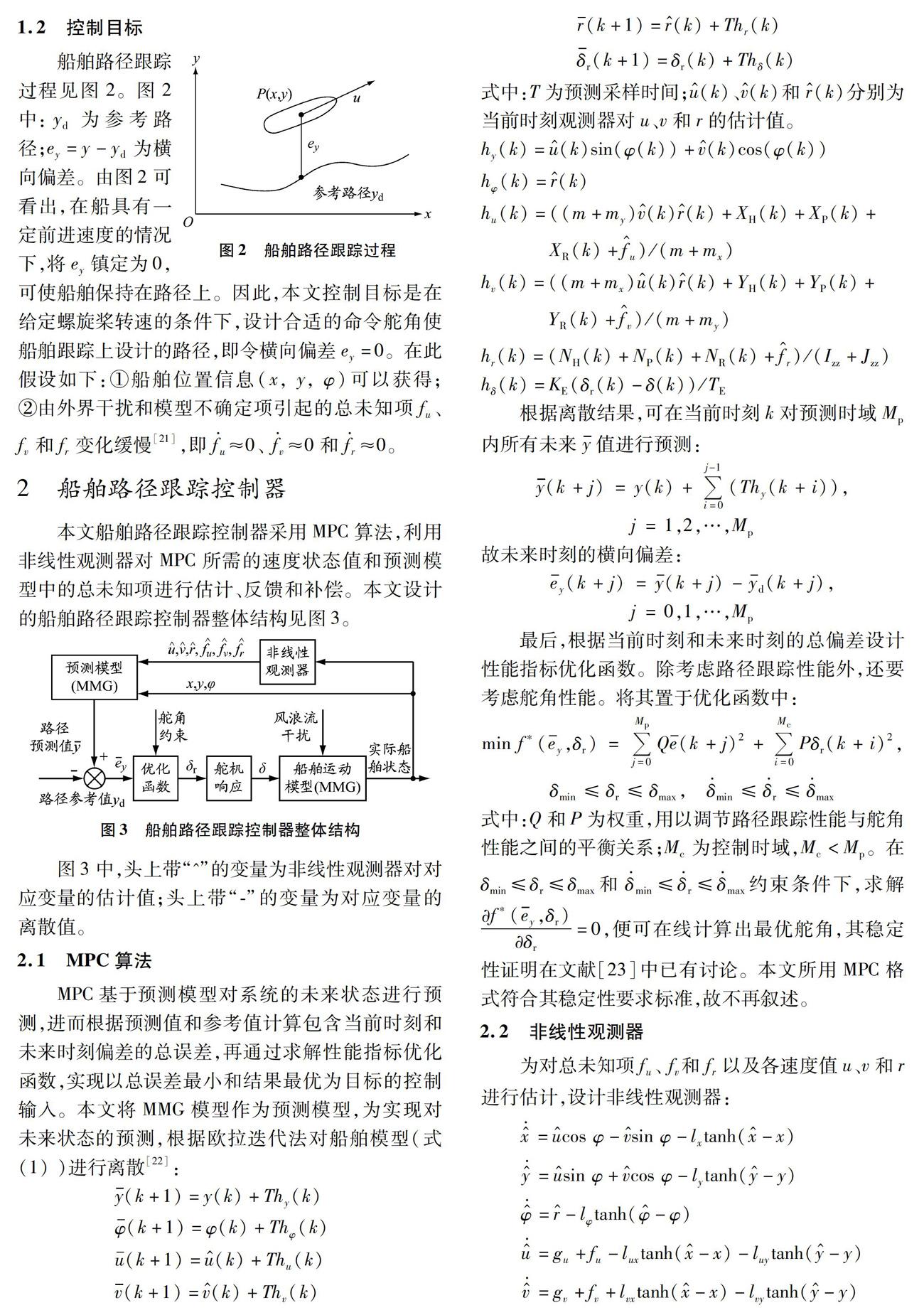
船舶路徑跟蹤過程見圖2。
圖2中:yd為參考路徑;ey=y-yd為橫向偏差。由圖2可看出,在船具有一定前進速度的情況下,將ey鎮定為0,可使船舶保持在路徑上。因此,本文控制目標是在給定螺旋槳轉速的條件下,設計合適的命令舵角使船舶跟蹤上設計的路徑,即令橫向偏差ey =0。在此假設如下:
①船舶位置信息(x, y, φ)可以獲得;②由外界干擾和模型不確定項引起的總未知項fu、 fv和fr變化緩慢[21],即
2 船舶路徑跟蹤控制器
本文船舶路徑跟蹤控制器采用MPC算法,利用非線性觀測器對MPC所需的速度狀態值和預測模型中的總未知項進行估計、反饋和補償。本文設計的船舶路徑跟蹤控制器整體結構見圖3。
圖3中,頭上帶“^”的變量為非線性觀測器對對應變量的估計值;頭上帶“-”的變量為對應變量的離散值。
2.1 MPC算法
MPC基于預測模型對系統的未來狀態進行預測,進而根據預測值和參考值計算包含當前時刻和未來時刻偏差的總誤差,再通過求解性能指標優化函數,實現以總誤差最小和結果最優為目標的控制輸入。本文將MMG模型作為預測模型,為實現對未來狀態的預測,根據歐拉迭代法對船舶模型(式 (1) )進行離散[22]:
式中:T為預測采樣時間;u^(k)、
v^(k)和r^(k)分別為當前時刻觀測器對u、v和r的估計值。
根據離散結果,可在當前時刻k對預測時域Mp內所有未來
y值進行預測:
最后,根據當前時刻和未來時刻的總偏差設計性能指標優化函數。除考慮路徑跟蹤性能外,還要考慮舵角性能。將其置于優化函數中:
式中:Q和P為權重,用以調節路徑跟蹤性能與舵角性能之間的平衡關系;Mc為控制時域,Mc δ·min≤ δ·r≤ δ·max 約束條件下,求解 f*(ey,δr)δr=0,便可在線計算出最優舵角,其穩定性證明在文獻[23]中已有討論。本文所用MPC格式符合其穩定性要求標準,故不再敘述。 2.2 非線性觀測器 為對總未知項fu、 fv 和 fr以及各速度值u、v和r進行估計,設計非線性觀測器: 式中:帶不同下標的l為正的參數;gu、gv和gr為模型已知部分。考慮假設②,計算觀測器估計誤差如下: 式中:A~= A^-A(其中A分別代表式中的x、y、φ、u、v、r、fu、 fv和fr)為各狀態逼近誤差。選擇Lyapunov函數如下: 式中:χ、η、μ、λ和γ為正系數。對V求導得到 因為位移的數量級比速度和加速度的數量級高,所以當參數lx和ly的值比其他參數值大時,z1和z2括號部分的正負分別取決于 x~和y~,故有z1≤0和z2≤0。由式(2)可知,u~和v~分別與 x~和y~呈反比例關系,故通過調節參數lux與luy、lvx與lvy、lfux與lfuy、lfvx與lfvy之間的比例大小,可調節x~與y~不同正負號時的反饋量大小。當x~或y~小于0時,u~或v~將增加至大于0,此時有z3≤0和z4≤0;當x~或y~大于0時,u~或v~將減小至小于0,仍有z3≤0和z4≤0。因此,存在很小的正數σ,滿足z3+z4≤σ,則有 對于r和fr的分析與上述過程類似,故不再詳述。綜上,所設計的觀測器可實現對速度和總未知項的逼近。 3 仿真分析 3.1 仿真數據 通過仿真實驗對MPC算法的有效性進行驗證。仿真船舶參數[19]:滿載吃水8 m,滿載排水14 635 t,船長126 m,船寬20.8 m,給定螺旋槳轉速100 r/min。以MMG模型(式(1))作為仿真模型,其中風干擾力XW、YW和力矩NW的計算式[24]如下: 式中:ρa為空氣密度;αr為相對風向角;Ur為相對風速;Af和As分別為水線以上的正投影面積和側投影面積;L為船舶總長;CW,X(αr)、CW,Y(αr)和CW,N(αr)分別為風壓力(矩)系數。 浪干擾力XWave、YWave和力矩NWave的計算式[25]如下: 式中:λ′為浪波長;χ′為波浪遭遇角;ρ為海水密度;α為波幅;CWave,X(λ)、CWave,Y(λ)和CWave,N(λ)分別為波浪漂移力(矩)系數。 3.2 仿真結果 直線跟蹤:在此將本文設計的控制器(采用結合觀測器的MPC算法)與文獻[19]設計的控制器(采用結合RBF神經網絡的MPC算法)做對比仿真,仿真結果分別用下標obs和RBF區分;在MATLAB Simulink環境下進行仿真,仿真時間為1 200 s;船舶初始位置(x0, y0, φ0)=(0, 200 m, 0),系統初始狀態(u0, v0, r0)=(7.2 m/s, 0, 0),參考路徑yd=0。外界干擾:風速10 m/s,風向20°sin(0.02t)+45°;流速1 m/s,流向5°sin(0.005t)+ 45°;波浪遭遇角 φ+135°-20°sin(0.02t),浪波長83 m。控制參數: 圖4中,由于受到時變干擾的影響,yobs和yRBF在穩定后均有小范圍的波動,但波動值小于船寬的10%,這符合實際航行的要求,因此可認為這兩種控制器均能有效解決環境干擾問題,使船準確地跟蹤上參考路徑。圖5中,由于時變干擾,艏向角和舵角都有一定的波動,以抵抗擾動,而δobs和δRBF的幅值均在約束范圍內,并且光滑無抖振,說明MPC方法具有解決舵幅約束問題的能力。圖6展示了本文設計的控制器在處理舵速約束上的有效性,舵速始終在5 (°)/s以內。圖7和圖8分別描述了利用本文設計的控制器對u、v、r以及3個總未知項 fu、 fv和fr的逼近結果,其中各速度值在5~10 s內便可被準確估計出,總未知項在20 s左右可被逼近。以上結果說明,本文所提方法不僅在路徑跟蹤、外界干擾處理和舵角約束上可以達到與文獻[19]所用方法相同的效果,而且無須測量速度,避免了系統高階狀態值不易被測量的問題。 曲線跟蹤:為驗證本文設計的控制器對曲線路徑跟蹤也有效,選取正弦參考路徑yd=200×sin(0.000 35πx)進行仿真實驗;船舶初始位置(x0, y0, φ0)=(0, 0, 0),系統初始狀態(u0, v0, r0)=(7.2 m/s, 0, 0)。外界干擾:風向30°sin(0.01t)+45°,流向10°sin(0.005t)+45°,其余參數與直線跟蹤相同。 從圖9可以看出,本文設計的控制器在時變干擾下,仍能使船跟蹤上參考曲線路徑,說明本文設計的控制器具有曲線跟蹤能力。圖10展示 了利用本文設計的控制器對舵角和舵速約束的結果:由于時變干擾影響,再加上正弦跟蹤需要一直轉變航向,所以舵角也需要一直變化,但波動幅值小于10°,并且光滑;舵速也在約束范圍內。 4 結束語 為解決船舶路徑跟蹤中舵角需優化﹑舵幅和舵速受約束等問題,本文提出以引入舵機響應系統的船舶MMG模型為預測模型的MPC算法,并構建非線性觀測器,同時對干擾和速度進行逼近。仿真結果表明,所設計的控制器使船在風浪流時變干擾下仍能準確地跟蹤上參考路徑。此外舵幅和舵速均在限制值內,舵角幅值小且光滑,這可減小船舶航行中的舵機能量消耗,而且各速度值和3個總未知項均可被觀測器成功地逼近,驗證了控制器的有效性。下一步將在觀測器調參和航跡跟蹤(考慮速度問題,即對x和y均進行控制)方面繼續進行研究。 參考文獻: [1]WANLei, ZENG Jiangfeng, LI Yueming,et al. Neural observer-based path following control for underactuated unmanned surface vessels with input saturation and time-varying disturbance[J].International Journal of Advanced Robotic Systems, 2019, 16(5): 1-17. DOI: 10.1177/1729881419878071. [2]NAGAIT, WATANABE R. Applying position prediction model for path following of ship on curved path[C]//Proceedings of the 2016 IEEE Region 10 Conference, TENCON 2016. Institute of Electrical and Electronics Engineers Inc.,2017: 3675-3678. DOI: 10.1109/TENCON.2016.7848743. [3]WANGYuanhui, TONG Haiyan, WANG Chenglong. High-gain observer-based line-of-sight guidance for adaptive neural path following control of underactuated marine surface vessels[J]. IEEE Access, 2019, 7: 19258-19265. [4]PADIDEHR, KHOSHNAM S, ABBAS C. Output feedback look-ahead position control of electrically driven fast surface vessels[J]. Automatika, 2016, 57(4): 968-981. DOI: 10.7305/automatika.2017.12.1485. [5]沈智鵬, 畢艷楠, 郭坦坦, 等. 帶非線性觀測器的欠驅動船舶自適應動態面輸出反饋軌跡跟蹤控制[J]. 系統工程與電子技術, 2019, 41(2): 409-416. DOI: 10.3969/j.issn.1001-506X.2019.02.24. [6]丁福光, 馬燕芹, 王元慧, 等. 基于狀態觀測器的多艘船舶魯棒同步控制[J]. 哈爾濱工程大學學報, 2015, 36(6): 789-794. DOI: 10.3969/j.issn.1006-7043.201404001. [7]WANGJianqin, ZOU Zaojian, WANG Tao. High-gain extended state observer based adaptive sliding mode path following control for an underactuated vessel sailing in restricted waters[J]. Applied Scinces, 2019, 9(6): 1102. DOI: 10.3390/app9061102. [8]HUANGHongyun, FAN Yunsheng. Path following control for under-actuated surface vessel with disturbance[C]//第30屆中國控制與決策會議論文集. 中國自動化學會信息物理系統控制與決策專業委員會, 2018: 3265-3269. [9]李榮輝, 曹峻海, 李鐵山. 波浪作用下船舶航向自抗擾控制設計及參數配置[J]. 控制理論與應用, 2018, 35(11): 1601-1609. DOI: 10.7641/CTA.2018.80319. [10]沈智鵬, 張曉玲, 張寧, 等. 基于神經網絡觀測器的船舶軌跡跟蹤遞歸滑模動態面輸出反饋控制[J]. 控制理論與應用, 2018, 35(8): 1092-1100. DOI: 10.7641/CTA.2018.70456. [11]張賀, 姚杰, 隋江華, 等. 基于DSC的欠驅動船舶路徑跟蹤神經滑模控制[J]. 船舶工程, 2019, 41(10): 85-91. DOI: 10.13788/j.cnki.cbgc.2019.10.18. [12]FANYunsheng, HUANG Hongyun, TAN Yuanyuan. Robust adaptive path following control of an unmanned surface vessel subject to input saturation and uncertainties[J]. Applied Scinces, 2019, 9(9): 1815. DOI: 10.3390/app9091815. [13]QIUBingbing, WANG Guofeng, FAN Yunsheng,et al. Adaptive sliding mode trajectory tracking control for unmanned surface vehicle with modeling uncertainties and input saturation[J]. Applied Sciences, 2019, 9(6): 1240. DOI: 10.3390/app9061240. [14]MUDongdong, WANG Guofeng, FAN Yunsheng,et al. Adaptive trajectory tracking control for under-actuated unmanned surface vehicle subject to unknown dynamics and time-varing disturbances[J]. Applied Sciences, 2018, 8(4): 547. DOI: 10.3390/app8040547. [15]YUYalei, GUO Chen, YU Haomiao. Finite-time predictor line-of-sight based adaptive neural network path following for unmanned surface vessels with unknown dynamics and input saturation[J]. International Journal of Advanced Robotic System, 2018, 15(6): 1-14. DOI: 10.1177/172988141881 4699. [16]LIUYong, BU Renxiang, GAO Xiaori. Ship trajectory tracking control system design based on sliding model control algorithm[J]. Polish Maritime Research, 2018, 25(3): 26-34. [17]柳晨光, 初秀民, 王樂, 等. 欠驅動水面船舶的軌跡跟蹤模型預測控制器[J]. 上海交通大學學報, 2015, 49(12): 1842-1854. DOI: 10.16183/j.cnki.jsjtu.2015.12.015. [18]LIUChenguang, ZHENG Huarong, NEGENBORN R,et al. Adaptive predictive path following control based on least squares support vector machines for underactuated autonomous vessels[J]. Asian Journal of Control, 2019: 2208. DOI: 10.1002/asjc.2208. [19]李榮輝, 陳志娟, 李宗宣, 等. 基于歐拉迭代模型預測的欠驅動水面船舶路徑跟蹤控制[J]. 廣東海洋大學學報, 2020, 40(1): 106-112. DOI: 10.3969/j. issn.1673-9159.2020.01.014. [20]ZHANGWei, ZOU Zaojian, DENG Deheng. A study on prediction of ship maneuvering in regular waves[J]. Ocean Engineering, 2017, 137: 367-381. DOI: 10.1016/j.oceaneng.2017.03.046. [21]LIUZhiquan. Pre-filtered backstepping control for underactuated ship path following[J]. Polish Maritime Research, 2019, 26(2): 68-75. DOI: 10.2478/pomr-2019-0026. [22]DEALCANTARA ANDRADE F A, HOVENBURG A R,? DE LIMA L N,et al. Autonomous unmanned aerial vehicles in search and rescue missions using real-time cooperative model predictive control[J]. Sensors, 2019, 19(19):1-22. DOI: 10.3390/s19194067. [23]MARJANOVICO, LENNOX B. Infinite horizon model predictive control with no terminal constraint[J]. Computers & Chemical Engineering, 2004, 28(12): 2601-2610. DOI: 10.1016/j. compchemeng. 2004.07.005. [24]LIZongxuan, LI Ronghui, BU Renxiang. Path following of under-actuated ships based on model predictive control with state observer [J]. Journal of Marine Science and Technology, 2020, 4: 1-11. DOI: 10.1007/s00773-020-00746-1. [25]李宗宣, 卜仁祥, 章滬淦. 結合改進RBF與虛擬圓弧的船舶路徑滑模控制[J]. 西北工業大學學報, 2021, 39(1): 216-223. DOI: 10.1051/jnwpu/20213910216. (編輯 趙勉)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19