基于TRIZ理論的甜菜制糊技術研究
2021-05-03 11:56:16姚一婧
黑龍江科學 2021年8期
陳 剛,姚一婧
(黑龍江大學 機電工程學院,哈爾濱 150080)
0 引 言
甜菜制糊為甜菜品質檢測的前期處理工序,用于甜菜群體品質檢測的多株甜菜混合測定取樣,制取少量具備代表性的樣品菜糊,進而進行甜菜含糖率和其他成分分析。樣品取樣方法為逐株用鋸糊鋸片在位于塊根非根溝一面的居中位置,縱向掏溝至1/2深度鋸取甜菜糊,然后將甜菜糊聚集在集糊器內。
我國甜菜品質檢測前期處理技術和設備還比較落后,許多方面有待改進,需要提高甜菜品質檢測工作效率和準確性,以適應制糖工業發展需要。甜菜制糊技術和設備存在的問題主要有:人工喂料操作復雜,勞動強度大,安全性差。工作時設備振動,集糊器托盤時常脫落,造成甜菜糊損失,影響檢測準確性。鋸糊時甜菜糊飛濺,設備清理(洗)困難。甜菜制糊機的應用特點是每年在甜菜收獲(季節)后半個月內集中運行使用,所以要求設備處理效率高,清洗便捷,且易于維護保養,制造成本低。
TRIZ理論是一種創新方法學,它克服了傳統創新方法隨機性、無序性等缺點,使創新走出了盲目的、高成本的試錯和靈光一現式的偶然,大大加快了創造發明的進程,并能得到高質量的創新產品[1]。針對上述甜菜制糊技術存在的問題,嘗試運用TRIZ理論,快速準確地確定問題的探索方向,突破思維障礙,找到解決甜菜制糊技術問題的方案。
1 系統分析
1.1 功能分析
功能分析用于理清技術系統的主要功能及輔助功能,以便理解系統,找出系統的問題所在[2]。甜菜制糊技術系統主要功能為甜菜鋸糊、甜菜輸送,輔助功能為菜糊收集。通過對該技術系統進行分解,明確了系統各個組件的功能及組件之間的互相關聯作用。構建的甜菜制糊系統功能模型如圖1所示。
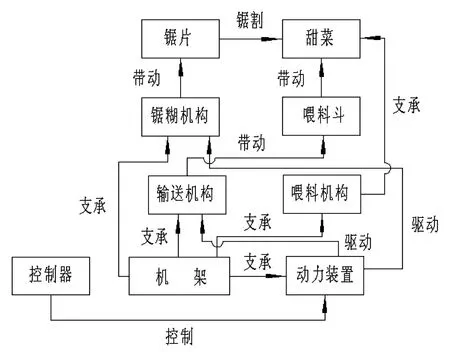
圖1 甜菜制糊系統功能模型圖
1.2 最終理想解與資源分析
運用TRIZ理論解決問題,首先不考慮客觀限定的約束條件,理想化地定義最終理想解,確保問題解決過程沿著最終目標前進,克服慣性思維,提高創新效率。設定了最終理想解,就是設定了技術系統改進的方向,即使理想的解決方案不能100%獲得,也會引導得到最巧妙和有效的解決方案[3]。經分析,甜菜制糊技術改善的最終理想解為:甜菜制糊機能夠自行高效(安全)地制取甜菜糊。達到理想解的障礙為:甜菜制糊喂料作業勞動強度大,安全性差,集糊器托盤時常脫落,甜菜糊飛濺,清理困難。
資源分析即全面系統化地考慮可利用資源,以激發解決問題的創造性靈感。經分析,該系統可利用的資源包括場資源,即電場、機械場、磁場;空間資源,即系統內部空間、機架上及周圍空間;時間資源,即系統喂料操作時間、鋸糊時間、卸料時間等;功能資源,即系統動力、機架承載、輸送機構的傳遞功能等。
TRIZ理論的三大核心點是理想解、矛盾和資源,它們貫穿于解決問題的始終[4]。運用TRIZ理論解決問題時,應全面考慮系統所涉及的資源,通過對資源的合理利用,解決矛盾,實現理想解。下面,結合TRIZ理論的具體應用,探討甜菜制糊技術的具體矛盾(問題)及解決方法。
2 ARIZ算法在甜菜喂料機構研究中的應用
甜菜制糊要求效率高,系統(甜菜制糊機)處理能力一般達到960株/h,采用人工向喂料斗內喂料裝填甜菜。甜菜大小不同,喂料時均需將其中心線對準喂料斗中心,且雙手握持甜菜待喂料斗運動到位時,向喂料斗運動反方向推送甜菜,直至甜菜完全進入喂料斗深處后方能撤出雙手,以保證下一步鋸糊工序能夠順利可靠完成。如果撤手不及時,運動的喂料斗容易碰傷手。整個喂料動作復雜,安全性差。
ARIZ是一種非常強大和精準的方法,能指引人們有序工作,找到最佳解決問題的方法[5]。ARIZ一般用于解決狀態比較含糊、復雜的問題。應用時需要對問題進行分析和簡化,建立一個可以準確描述的極其單一化的模型。以下,嘗試按照ARIZ-85的步驟來分析解決甜菜制糊技術中的甜菜喂料問題。
2.1 分析問題
問題最小化:甜菜制糊技術系統用于甜菜群體品質檢測,制取少量具有代表性的樣品菜糊。與制糊機相關的部分包括:機架、輸送機構、鋸糊機構、鋸片、喂料斗等。技術矛盾1(TC-1):如果手持甜菜對準喂料斗,等待喂料斗運動到位,再向喂料斗運動反方向推送,甜菜可完全進入喂料斗,但喂料工藝操作復雜,安全性差。技術矛盾2(TC-2):如果手持甜菜不顧及是否對準喂料斗,不等喂料斗到位,又未向喂料斗運動反方向推送甜菜,甜菜就不能完全進入喂料斗,但喂料工藝操作簡單、操作安全性好。
確定沖突元素:產品-甜菜,工具-喂料斗。
建立技術矛盾模型。TC-1:甜菜對準喂料斗,等待料斗,推送甜菜,甜菜可完全進入喂料斗,但操作復雜,安全性差。TC-2:不顧及甜菜是否對準喂料斗,不等待料斗,未推送甜菜,甜菜不能完全進入喂料斗,但操作簡單,操作安全性好。
選擇技術矛盾,TC-1:甜菜可完全進入喂料斗,有利于下步鋸糊工序順利可靠完成。
強化技術矛盾,手持甜菜喂料,甜菜完全進入喂料斗,再向料斗運動反向方推送,操作更復雜,安全性極差。
陳述問題模型,沖突元件:甜菜、喂料斗。沖突的強化:甜菜完全進入喂料斗,再向料斗運動反方向推送,操作更復雜,安全性極差。找到X元素,不顧及是否對準喂料斗,不等喂料斗到位,又未向喂料斗運動反方向推送甜菜,甜菜也能完全進入喂料斗。
應用標準解,考慮利用標準解法的系列解法來解決問題模型,但沒有找到。
2.2 分析問題模型
主要目標是找到用來解決問題的有效資源(空間、時間、物質和場)。
定義操作區域(OZ),甜菜與喂料斗接觸處的空間。
定義操作時間(OT),發生沖突的時間段(T1):甜菜向喂料斗裝填的時間。沖突發生前的時間(T2):甜菜向喂料斗裝填前的時間。
查明資源,場資源:電場、機械場、磁場。空間資源:系統的內部空間、機架上及周圍空間。時間資源:系統喂料操作時間、鋸糊時間、卸料時間等。功能資源:系統動力、機架承載、輸送機構的傳遞功能。
2.3 陳述最終理想解和物理矛盾
可得到最終理想解(IFR),也確定了阻礙得到IFR的物理矛盾,指示出獲得理想解的方向。
表述IFR-1:引入X元素,在操作區和操作時間內,不會以任何方式使系統變復雜,不用顧及甜菜是否對準喂料斗,不用等喂料斗到位,又不用推送,并且甜菜能完全進入喂料斗。
強化IFR-1:再次分析操作區內及周圍可利用的資源,沒有發現任何與X要求相近的資源。
宏觀物理矛盾:操作區的操作時間內,為了使甜菜能完全進入喂料斗,需對準喂料斗,等待喂料斗到位,再向喂料斗運動反方向推送。為了操作簡單、操作安全性好,不顧及甜菜是否對準喂料斗,不等待料斗,不推送。
微觀物理矛盾:操作區的操作時間內,為了使甜菜微粒能完全進入喂料斗,需對準喂料斗,等待喂料斗到位,再向喂料斗運動反方向推送。為了操作簡單、操作安全性好,不顧及甜菜微粒是否對準喂料斗,不等待料斗,不推送。
表述IFR-2:操作區的操作時間內,不用顧及甜菜是否對準喂料斗,不用等喂料斗到位,又不用推送,并且甜菜能自己完全進入喂料斗。
使用物-場分析。工件(S1)-甜菜,工具(S2)-喂料斗,場(F)-機械場。S1和S2之間存在又不存在沖突,無法建立物-場模型。
2.4 利用資源
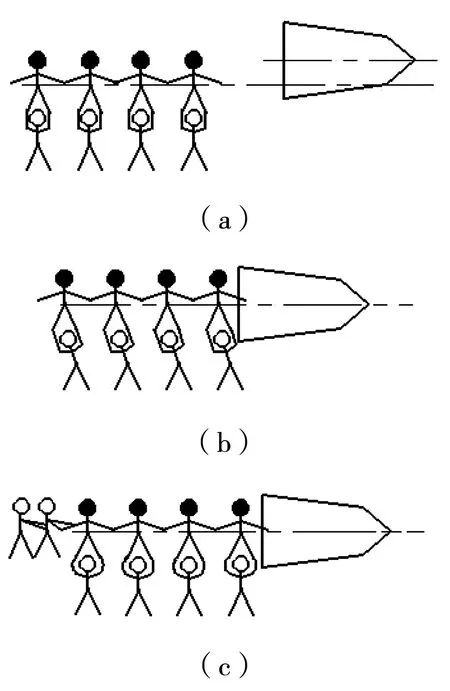
圖2 甜菜喂料問題小人模型圖
從IFR返回,理想解是:不用顧及甜菜是否對準喂料斗,不用等喂料斗到位,又不用推送,甜菜能完全進入喂料斗。
使用混合物質資源:采用能向后推送甜菜又可依據其大小(重量)使甜菜自行對準的機構。
技術方案解決:在該甜菜制糊機機架上部的喂料空間內,研究設計一個特殊的喂料機構替代人工向喂料斗內填加樣品甜菜的操作。該喂料機構由上部刀片狀的尖頭支承桿、彈簧鋼制成的彈性擋推片、圓柱螺旋壓縮彈簧及支座等組成,支座固定在制糊機機架上,如圖3所示。

圖3 喂料機構原理結構示意圖
采用該喂料機構,操作工人只需手持甜菜將其最底部插放在支承桿上部刀片狀的尖頭內,即可撤手。由于支承桿下部分別由適當彈力的壓縮彈簧支承,可實現依樣品甜菜大小(重量)不同,自行調節甜菜中心線高度,使其對準喂料斗中心。由于喂料斗下部開有貫通的長槽,因此當喂料斗運動到位,帶動甜菜向鋸片方向運動時,喂料斗底部不會與支承桿上部刀片狀的尖頭碰撞干涉。另外,在喂料機構支座上設有適當彈力的彈性擋推片,當喂料斗帶動甜菜運動到彈性擋推片處,該擋推片將向喂料斗運動反方向推送甜菜,使甜菜完全進入喂料斗,為鋸糊工序做好準備。
經過以上幾個步驟找到了問題解決方案,可以直接進入ARIZ步驟七。步驟七:分析解決物理矛盾的方法,主要目的是審核擬解決問題的實施方案質量。審核解決方案:解決技術問題時,沒有產生附加的問題。解決方案的初步評估:獲得的方案能保證實現理想化的最終結果IFR-1的主要要求。方案消除了宏觀物理矛盾,在問題實際條件中能解決人工向喂料斗內裝填甜菜操作復雜、安全性差的問題。經過專利搜索審查解決方案的新穎性,未見到有關專利涉及的內容。預估應用方案時所產生的子問題:采用已獲得的方案,尚未發現會帶來附加子問題。
3 物—場模型分析方法在集糊器研究設計中的應用
集糊器用于收集甜菜制糊鋸片高速旋轉時鋸下的甜菜糊,它由托板和托盤組成。托板固定在機架上,托盤由托板支承。由于工作中托盤需在托板上頻繁地取下和放上,所以將托板和托盤固定在一起會給拿取操作帶來不便,還會降低作業效率。但如果不固定,制糊機工作時機架的振動會使托盤從托板上脫落,造成甜菜糊損失,影響檢測的準確性。
使用物—場模型分析和解決問題,有助于使問題聚焦。根據物—場模型理論,物質可以是工件或工具,而場是能量形式,是不同物質之間的相互作用或影響[6]。針對上述集糊器研究設計中托盤脫落問題進行物—場分析,可以找到技術系統的改進方案。具體分析過程如下:確定相關的元素:工件(S1)—托盤,工具(S2)—托板,場(F1)—機械場。構建物—場模型:本問題為效應不足的完整形式的模型。對應的初始模型如4圖所示。

圖4 物—場初始模型圖
選擇一般解:效應不足的完整模型為第三類模型,有三個一般解法:4,5,6[7]。本問題選擇的一般解法是5,即另外增加一個場F2來強化有用的效應。如圖5所示。

圖5 物—場模型圖
發展概念:增加另外一個磁場F2來強化有用的效應。由于托盤和托板均為鋼板材料制成(外表面分別為搪瓷涂層和噴塑處理),在托板底部固定適當磁力的永磁鐵,即可增加一個磁場,使托盤和托板之間產生適當強度的吸引力。這樣一來,既可保持托盤工作時不會由于設備振動從托板上脫落,又能方便地將托盤從托板上取下,增加的磁場F2起到了強化有用的效應。方案結果如圖6所示。

圖6 增加磁場使托盤和托板間產生吸引力方案示意圖
4 發明原理在擋料防護板結構設計中的應用
糖料甜菜試驗方法國家標準規定,甜菜制糊應滿足鋸片轉速2 900 r/min和鋸片直徑 250 mm的要求。高速旋轉的鋸片鋸割甜菜時,鋸下的甜菜糊會沿鋸片旋轉的切線方向飛出,大部分落入集糊器托盤之內,但也不可避免地有一部分飛濺到托盤之外的電動機、輸送機構、機架等處。這些飛濺出來的甜菜糊會對設備造成污染。由于甜菜糊黏度大,因而設備使用后的清理十分不便。
發明原理“預先作用原理”的含義是:事先對物體(全部或其部分)施加必要的改變。在最方便的位置預先放置物體,使其在第一時間起作用。“分割原理”的含義是:將一個物體分割成相互之間獨立的若干部分,使一個物體分成易于組合及拆分的部分[8]。根據以上兩個發明原理的提示,特殊設計了可拆卸的擋料防護板,并將其安裝在適當的位置以遮擋甜菜糊向電動機、輸送機構、機架等處飛濺。該防護板由若干部分組合而成,拆卸及安裝方便,便于清理洗刷。可拆卸的擋料防護板的效果如圖7所示。

圖7 可拆卸的擋料防護板遮擋甜菜糊飛濺效果圖
5 結論
上述甜菜制糊技術的研究成果已在實際生產中得到了應用,顯著提高了甜菜品質檢測工作效率和準確性。使用該喂料機構,操作人員只需手持甜菜將其最底部插在支承桿上的尖頭內,大小(重量)不同的甜菜均可自行調節中心高度并完全進入喂料斗,操作簡單、安全可靠。集糊器托板底部固定適當磁力的永磁鐵,使托盤和托板之間產生吸引力,保證了托盤工作時不會因設備振動從托板上脫落帶來的甜菜糊損失,提高了檢測的準確性。特殊設計的可拆卸組合式擋料防護板遮擋了甜菜糊的飛濺,拆卸、安裝、清理洗刷的便利性得到了提高。制糊技術研究成果及在制糊機中的應用如圖8所示。

圖8 甜菜制糊技術研究成果在制糊機中的應用
運用TRIZ理論的ARIZ算法解決了人工向喂料斗內裝填甜菜時操作復雜、勞動強度大、安全性差的問題。采用物—場分析方法解決了集糊器托盤脫落的問題。依據預先作用原理和分割原理,設計了可拆卸組合式擋料防護板,解決了甜菜糊飛濺的問題,且拆卸及安裝方便,便于洗刷清理。TRIZ理論的應用快速準確地確定了問題的研究方向,加速了解決這些技術問題的效率,提出的技術方案已在實際生產中得到了應用,證明了其合理性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
江蘇安全生產(2023年1期)2023-02-08 05:58:38
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
數學物理學報(2020年2期)2020-06-02 11:29:24
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
資源再生(2017年3期)2017-06-01 12:20:59
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03