邊界約束對直升機尾操縱拉桿安裝頻率影響分析
2021-05-06 03:06:22沈安瀾侯寶紅曾曼成
南京航空航天大學(xué)學(xué)報 2021年2期
沈安瀾,侯寶紅,陳 靜,曾曼成,江 安
(1.中國直升機設(shè)計研究所,景德鎮(zhèn)333001;2.解放軍66350 部隊,保定071000)
某型直升機在飛行過程中出現(xiàn)腳蹬高頻振動問題,此種情況下長時間飛行容易造成飛行員疲勞,并極大地影響飛行員操縱。同時,操縱系統(tǒng)長時間處于高頻振動環(huán)境下也容易造成結(jié)構(gòu)失效和損傷,從而影響飛行安全。因此需要針對該型機腳蹬高頻振動問題開展分析,提出解決方案,改善腳蹬高頻振動,保證直升機飛行安全。
直升機飛行由飛行員通過操縱系統(tǒng)進行操控,而腳蹬作為直升機尾操縱系統(tǒng)的重要部分,其振動將直接影響飛行員的操縱。目前中國國內(nèi)直升機尾槳操縱系統(tǒng)大多為機械連接的硬式操縱系統(tǒng),主要包括駕駛艙操縱機構(gòu)(腳蹬)、航向并聯(lián)舵機、操縱拉桿(以下簡稱“拉桿”)、拉桿支座、搖臂、阻尼器以及尾助力器等,是一個沿操縱方向可進行軸向振動的動力學(xué)系統(tǒng)[1]。
直升機振源多同時激勵頻率分布廣,而尾操縱拉桿貫穿整個直升機尾部,操縱桿多而且固有頻率也較為豐富,導(dǎo)致影響尾操縱系統(tǒng)振動的因素多,從而當(dāng)腳蹬出現(xiàn)振動問題時,尾操縱系統(tǒng)排故會存在較大困難。在常規(guī)尾拉桿設(shè)計中,為了滿足裝配要求,拉桿、支座和搖臂之間均為間隙配合,由于加工制造誤差,裝配后的間隙在公差要求范圍內(nèi)是隨機的,因此拉桿邊界約束存在一定的不確定性。目前在拉桿設(shè)計過程中主要考慮拉桿的剛度、強度、固有頻率及安裝頻率[2-3],將拉桿邊界約束簡化為理想邊界下的固支梁或簡支梁,忽略裝配間隙等邊界約束對其安裝頻率影響[4-8],這容易造成個別拉桿在裝機后出現(xiàn)動特性不佳,從而出現(xiàn)拉桿局部共振,拉桿振動水平偏高,進一步引起腳蹬振動水平偏高,影響飛行員操縱。而長時間高振動環(huán)境也容易造成尾操縱拉桿、安裝搖臂和安裝支座等相應(yīng)尾操縱拉桿連接結(jié)構(gòu)出現(xiàn)損傷,影響飛行安全。
為了解決直升機腳蹬高頻振動問題,本文通過飛行振動數(shù)據(jù)分析,確定問題原因,基于Ritz 法建立了尾操縱拉桿參數(shù)化理論模型,并進一步借鑒螺栓連接結(jié)構(gòu)以及安裝部件之間的間隙等不確定邊界約束對系統(tǒng)安裝頻率的影響進行研究[5-10]。利用理論模型開展邊界約束對直升機尾操縱拉桿安裝頻率的敏感性分析,并根據(jù)計算分析結(jié)果提出了相應(yīng)的解決方案,經(jīng)地面動特性試驗和實際飛行試驗驗證,該解決方案可以有效地改善該型機腳蹬高頻振動問題。
1 腳蹬高頻振動原因分析
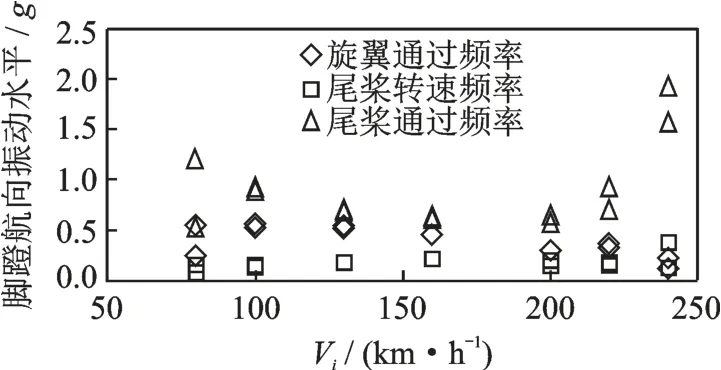
圖1 腳蹬航向振動水平隨飛行速度變化趨勢圖Fig.1 Variation trend of pedal course vibration level with flight speed
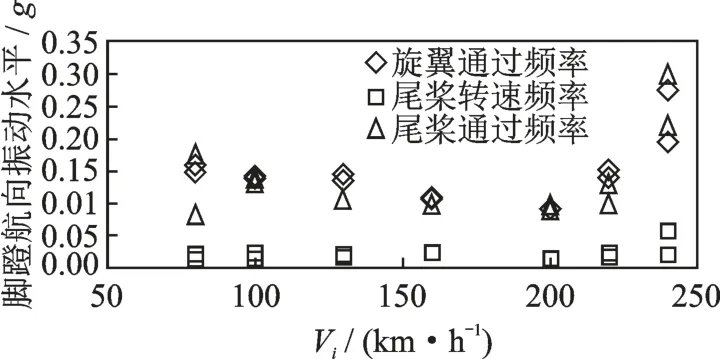
圖2 腳蹬垂向振動水平隨飛行速度變化趨勢圖Fig.2 Variation trend of pedal vertical vibration level with flight speed
某型直升機腳蹬飛行振動數(shù)據(jù)如圖1~2 所示,腳蹬振動以航向振動為主(根據(jù)機體坐標系,航向表示沿著機體縱向由機尾指向機頭,側(cè)向表示垂直航向指向機體側(cè)邊,垂向表示垂直于航向和側(cè)向沿著機體上下方向)。在大速度飛行狀態(tài)下,腳蹬航向在尾槳通過頻率下的振動水平較其他頻率下的振動水平高,結(jié)合飛行員反饋的腳蹬振動情況,確定腳蹬高頻振動主要是尾槳通過頻率下振動水平偏高導(dǎo)致。檢查尾槳及尾槳助力器等,并完成尾操縱拉桿動特性試驗,其中尾操縱斜拉桿(以下簡稱“尾斜拉桿”)側(cè)向安裝頻率為53 Hz,垂向安裝頻率為55.81 Hz,如圖3 所示。表1 給出了圖3 中尾斜拉桿側(cè)向安裝頻率53 Hz,垂向安裝頻率55.81 Hz 時所對應(yīng)的相位角及振幅。多架機尾斜拉桿的安裝頻率測試結(jié)果如表2 所示,表中數(shù)據(jù)表明,該型機尾斜拉桿垂向頻率較穩(wěn)定,保持在56 Hz 附近,而尾斜拉桿側(cè)向安裝頻率存在較大的分散性,在46.68~53.51 Hz 區(qū)間范圍內(nèi)變化,而且當(dāng)尾斜拉桿側(cè)向安裝頻率靠近尾槳通過頻率時(53.6 Hz),腳蹬存在不同程度的高頻振動現(xiàn)象。綜合尾槳、尾槳助力器等檢查結(jié)果、動特性試驗結(jié)果以及飛行員反饋的振動情況,初步判斷該架機由于尾斜拉桿側(cè)向動特性不佳從而形成尾斜拉桿局部共振,導(dǎo)致腳蹬高頻振動。
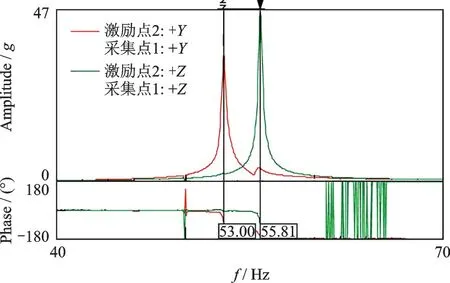
圖3 尾斜拉桿安裝頻率測試結(jié)果Fig.3 Test results of installation frequency of tail control stick
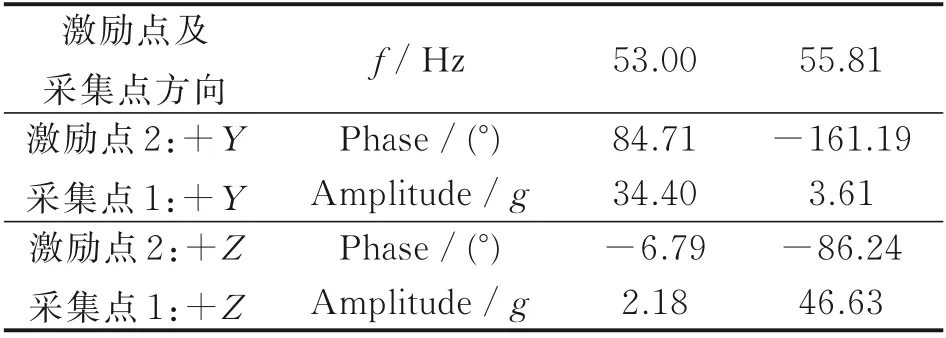
表1 尾斜拉桿側(cè)向安裝頻率53 Hz,垂向安裝頻率55.81 Hz 時對應(yīng)的相位角及振幅Table 1 Phase angle and amplitude corresponding to lat-eral installation frequency of 53 Hz and vertical installation frequency of 55.81 Hz
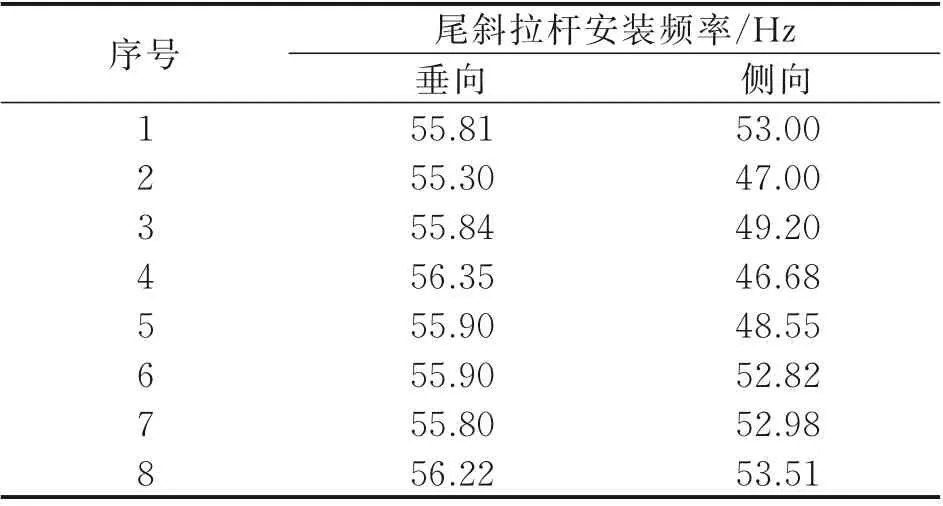
表2 多架機尾斜拉桿安裝頻率測試結(jié)果Table 2 Test results of installation frequency of multiple tail control sticks
2 尾斜操縱拉桿建模
為了解決該機腳蹬高頻振動問題,分析確定該型機尾斜拉桿側(cè)向安裝頻率分散性大的原因,同時基于外場的實際條件,結(jié)合外場計算分析的實際需要并縮短排故周期,進一步考慮參數(shù)敏感性分析的便捷性以及后續(xù)操縱拉桿參數(shù)優(yōu)化的需要,本文建立參數(shù)化理論模型分析討論邊界約束對直升機尾操縱動特性的影響,并分析了邊界約束對操縱拉桿安裝頻率參數(shù)敏感性,從而確定解決方案。
尾斜拉桿結(jié)構(gòu)形式如圖4 所示,其垂向可以等效為變截面簡支梁,側(cè)向可以簡化為變截面固支梁,并且將裝配間隙和螺栓擰緊力矩等不確定邊界約束條件等效為彈性剛度[5-10],最終,帶間隙的尾斜拉桿等效為帶彈性支撐的變截面梁[11-13],如圖5 所示。邊界約束對尾斜拉桿安裝頻率的影響轉(zhuǎn)化為彈性支撐對變截面梁的安裝頻率的影響,k1和k2分別表示彈性剛度,g1和g2分別表示扭轉(zhuǎn)剛度。基于Ritz 法[14]建立尾斜拉桿參數(shù)化理論模型,并利用理論模型分析討論彈性支撐對變截面梁的安裝頻率的影響。
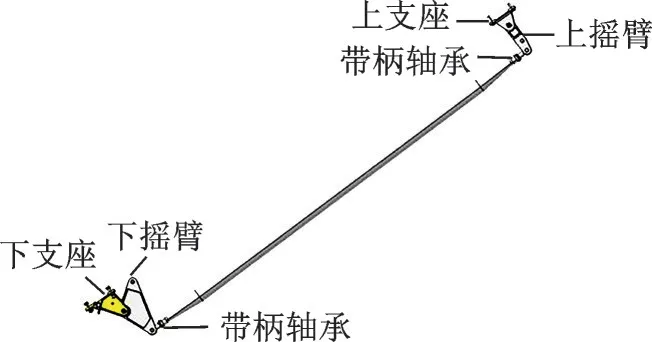
圖4 尾斜拉桿結(jié)構(gòu)圖Fig.4 Structural of tail control stick

圖5 尾斜拉桿等效模型示意圖Fig.5 Schematic diagram of equivalent model of tail control stick
根據(jù)振型疊加法,彈性支撐梁的撓度方程可以表示為[12]

式中:φi為彈性支撐梁的第i 階振型,qi為振型坐標的第i 分量。
基于Ritz 法使用假設(shè)模態(tài)[14],對彈性支撐梁進行自由度縮減,求出低階模態(tài)的近似值。
將尾斜拉桿等效為兩端帶彈性約束的自由梁,根據(jù)泰勒級數(shù)并略去高階項,彈性梁的振型函數(shù)可表示為

式中:ai1~ai7為權(quán)系數(shù),l 為彈性梁長度。
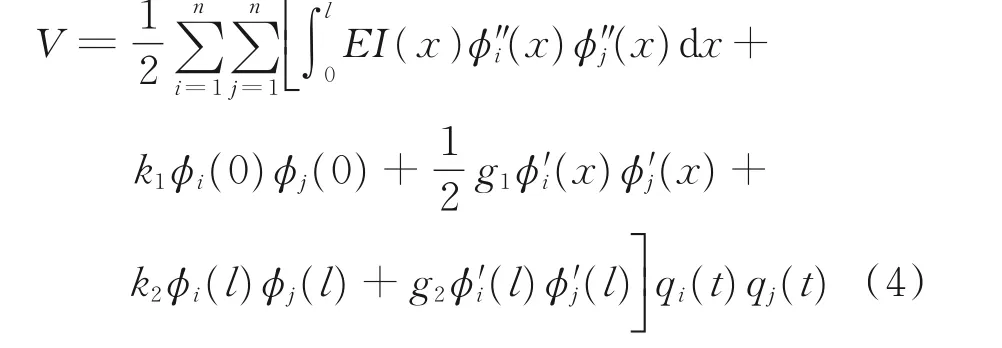
從而得到系統(tǒng)勢能V 為
式中:E 為彈性模量,I 為慣性矩。
將式(1~2)代入式(3),得到
從而系統(tǒng)勢能V 可以表示為

當(dāng)尾斜拉桿為自由梁時,邊界條件為

當(dāng)尾斜拉桿為簡支梁時,邊界條件為

當(dāng)尾斜拉桿為固支梁時,邊界條件為

將式(4~7)代入式(8),同時結(jié)合式(9~11)可以計算得到不同邊界約束下尾斜拉桿安裝頻率ωi(x)以及對應(yīng)頻率的振型φi(x)。
該型機尾斜拉桿為變截面設(shè)計,其中兩端帶柄軸承材料為鋼,安裝柄直徑為12 mm,長度為53.7 mm,拉桿材料為鋁合金。帶柄軸承安裝段拉桿為變截面中空桿設(shè)計,直徑為16~40 mm,厚度為2 mm,長度為114 mm;中間段為等截面中空桿設(shè)計,材料為鋁合金,直徑為40 mm,長度為1 029 mm,厚度為1.5 mm。將尾斜拉桿參數(shù)代入式(4~10),分別計算自由和理想邊界條件下前3 階尾斜拉桿的固有頻率和振型(除自由狀態(tài)前兩階零頻模態(tài)外),固有頻率計算結(jié)果如表3 所示,振型如圖6~8 所示。理想邊界條件下,尾斜拉桿不考慮間隙以及螺栓擰緊力矩的影響,則尾斜拉桿可等效為由上下安裝搖臂提供彈性支撐的變截面固支梁,上下?lián)u臂側(cè)向和垂向彈性剛度分別由靜力學(xué)計算得到,如表4 所示。
由表2~3 可知,在理想邊界條件下尾斜拉桿安裝頻率基本避開尾槳通過頻率(6.9%),同時尾斜拉桿垂向安裝頻率(第1 階)與實測結(jié)果基本一致,但尾斜拉桿側(cè)向安裝頻率(第1 階)與實測結(jié)果差距較大。進一步分析可知:裝配間隙會造成尾斜拉桿支撐剛度降低,不同的裝配間隙會造成尾斜拉桿側(cè)向安裝剛度不同程度的降低;裝配間隙對尾斜拉桿側(cè)向安裝剛度和頻率影響較大。
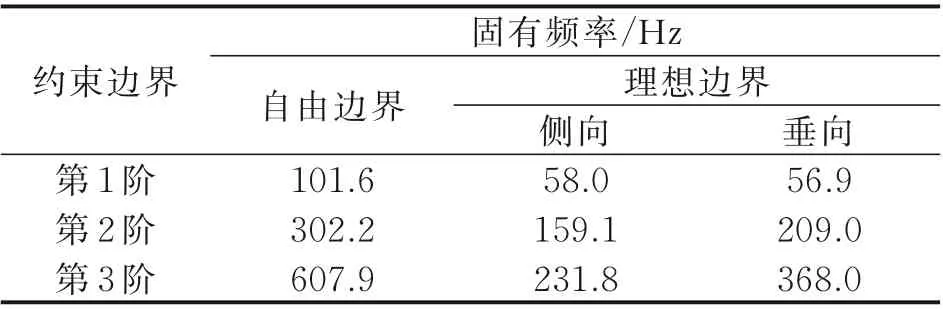
表3 尾斜拉桿不同邊界下固有頻率計算結(jié)果Table 3 Calculation results of natural frequency of tail control stick under different boundary
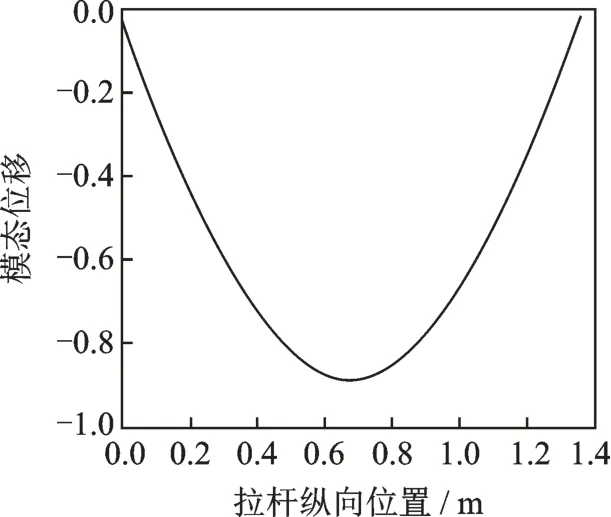
圖6 尾斜拉桿第一階振型Fig.6 First mode shape of tail control stick
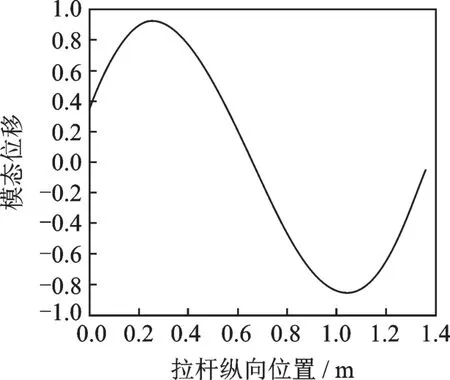
圖7 尾斜拉桿第二階振型Fig.7 Second mode shape of tail control stick
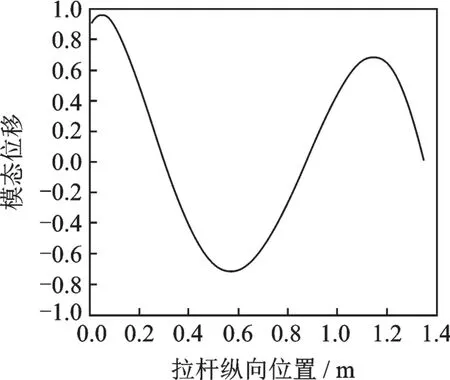
圖8 尾斜拉桿第三階振型Fig.8 Third mode shape of tail control stick
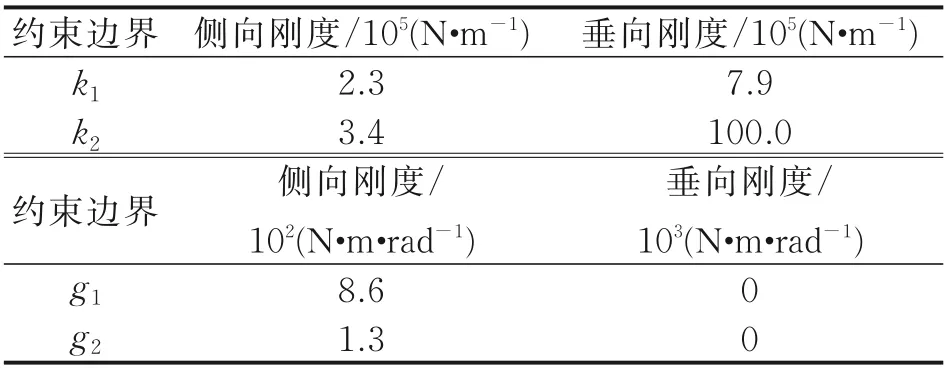
表4 上下?lián)u臂支撐剛度Table 4 Support rigidity of upper and lower rocker arms
3 邊界約束敏感性分析
基于以上計算結(jié)果,利用理論分析模型,定量計算分析邊界支撐剛度對于尾斜拉桿側(cè)向和垂向安裝頻率的影響。考慮實際安裝要求,并提高計算效率,剛度變化范圍設(shè)置為原剛度的0.1~3 倍,結(jié)果如圖9~17 所示。
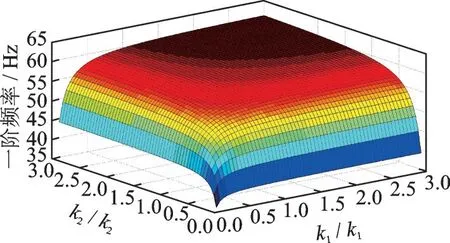
圖9 側(cè)向1 階頻率隨彈性支撐剛度變化Fig.9 Variation of lateral first-order frequency with elastic support stiffness
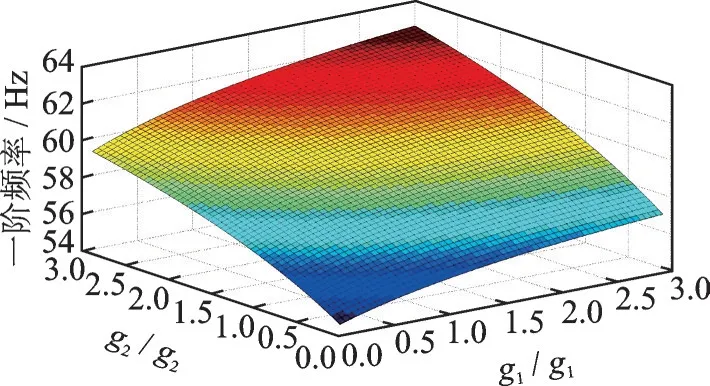
圖10 側(cè)向1 階頻率隨扭轉(zhuǎn)支撐剛度變化Fig.10 Variation of lateral first-order frequency with torsional support stiffness
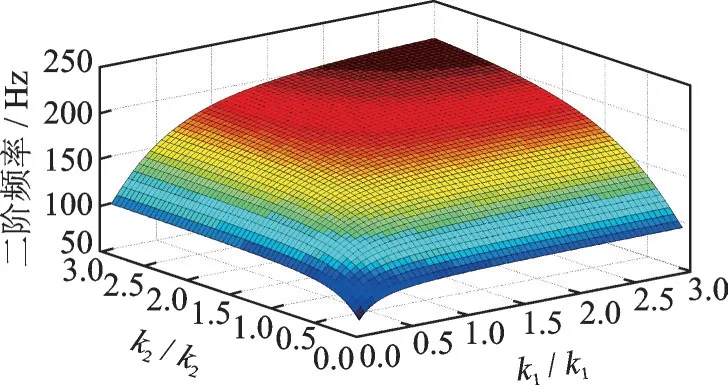
圖11 側(cè)向2 階頻率隨彈性支撐剛度變化Fig.11 Variation of lateral second-order frequency with elastic support stiffness
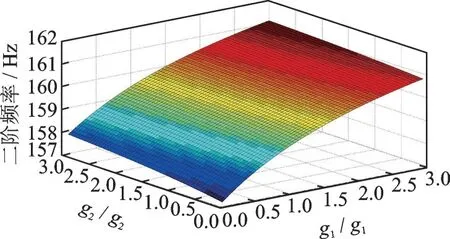
圖12 側(cè)向2 階頻率隨扭轉(zhuǎn)支撐剛度變化Fig.12 Variation of lateral second-order frequency with torsional support stiffness
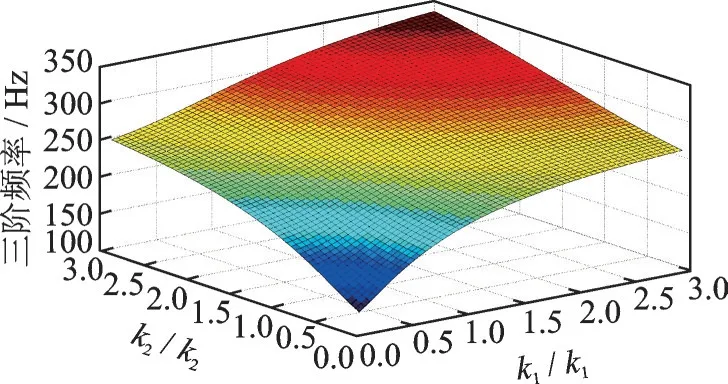
圖13 側(cè)向3 階頻率隨彈性支撐剛度變化Fig.13 Variation of lateral third-order frequency with elastic support stiffness
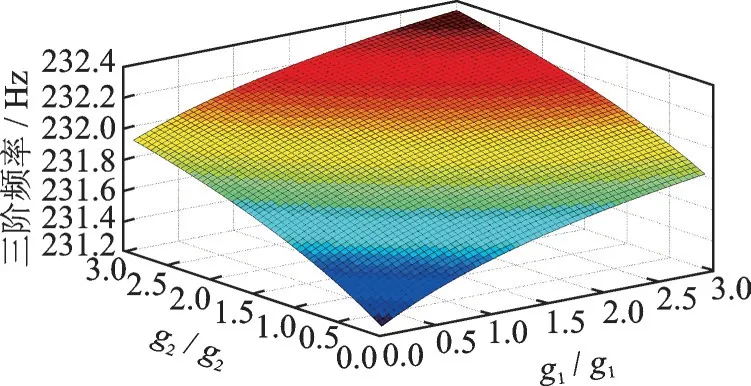
圖14 側(cè)向3 階頻率隨扭轉(zhuǎn)支撐剛度變化Fig.14 Variation of lateral third-order frequency with torsional support stiffness
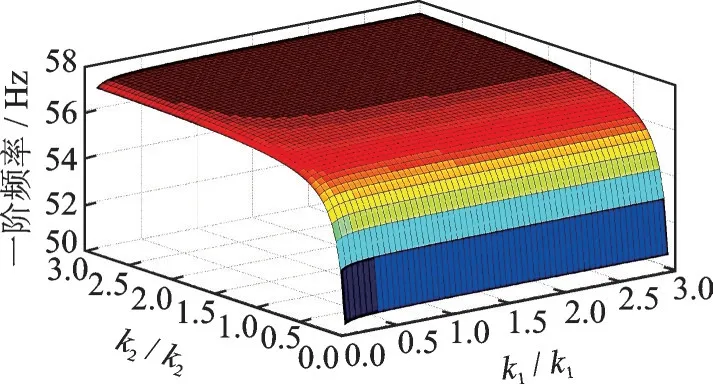
圖15 垂向1 階頻率隨支撐剛度變化Fig.15 Variation of vertical third-order frequency with support stiffness
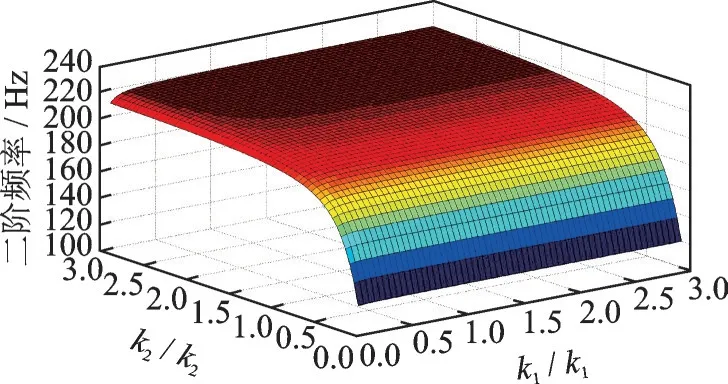
圖16 垂向2 階頻率隨支撐剛度變化Fig.16 Variation of vertical second-order frequency with support stiffness
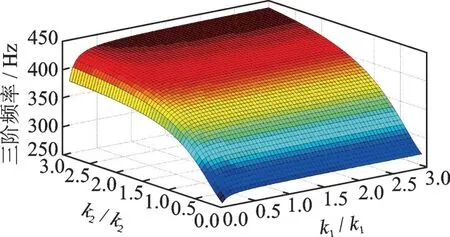
圖17 垂向3 階頻率隨支撐剛度變化Fig.17 Variation of vertical third-order frequency with support stiffness
圖9~17 顯示,尾斜拉桿安裝頻率對于支撐剛度較為敏感,隨著支撐剛度逐漸增大,安裝頻率并不會無限增大,而是逐漸趨近于某一值。當(dāng)彈性支撐剛度較小時,尾斜拉桿安裝頻率對支撐剛度的變化變得非常敏感,只有當(dāng)支撐剛度較大時,尾斜拉桿安裝頻率才會隨著支撐剛度的增大敏感度逐漸降低。邊界支撐剛度對操縱拉桿安裝頻率的影響隨著模態(tài)階數(shù)的增大而增大。
圖9~14 顯示,尾斜拉桿安裝頻率受彈性剛度影響較大,受扭轉(zhuǎn)剛度影響較小。圖15~17 顯示,當(dāng)兩端剛度相差較大時,操縱拉桿安裝頻率主要受到彈性剛度較大一端的支撐剛度影響。
4 解決方法
該機腳蹬高頻振動是由尾斜拉桿側(cè)向一階安裝頻率靠近尾槳通過頻率,導(dǎo)致尾斜拉桿局部產(chǎn)生共振引起。
為了改善該問題,需要對尾斜拉桿進行調(diào)頻,同時為了保證在不同的邊界約束下,尾斜拉桿安裝頻率均可以避開尾槳1 階通過頻率以及其他的激勵頻率,考慮進行尾斜拉桿的截面尺寸更改。
根據(jù)尾斜拉桿動特性試驗實測的安裝頻率以及理想邊界條件下安裝頻率計算結(jié)果,假設(shè)尾斜拉桿兩端支撐剛度損失相等,利用理論模型計算得到尾斜拉桿側(cè)向支撐剛度損失為50%~78%,垂向支撐剛度損失為60%。
對尾斜拉桿的截面尺寸進行更改需要保證尾斜拉桿強度滿足要求,即更改后尾斜拉桿截面面積大于等于原拉桿截面面積,假設(shè)尾斜拉桿截面面積和邊界支撐剛度不變,利用理論模型對尾斜拉桿結(jié)構(gòu)尺寸參數(shù)進行優(yōu)化,并計算得到尾斜拉桿外徑對其前3 階安裝頻率的影響曲線,如圖18~19 所示。
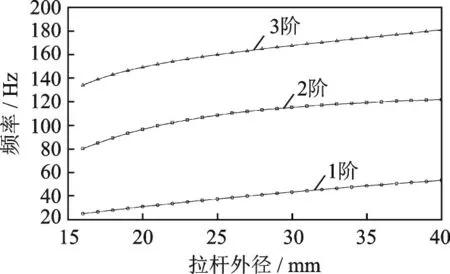
圖18 尾斜拉桿側(cè)向前三階頻率隨拉桿外徑變化曲線圖Fig.18 Variation curves of the first three order lateral instal-lation frequency with outer diameter of tail control stick
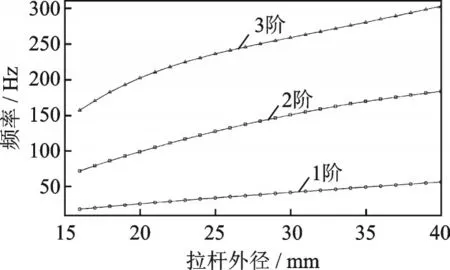
圖19 尾斜拉桿垂向前三階頻率隨拉桿外徑變化曲線圖Fig.19 Variation curves of the first three order vertical in-stallation frequency with outer diameter of tail con-trol stick
由圖可知,考慮尾斜拉桿實際剛度損失,并在不改變邊界約束條件下,尾斜拉桿外徑至少需要降低至Φ35 mm 以下。綜合考慮加工、裝配等因素,確定更改尾斜拉桿截面尺寸如下:直徑由Φ40 mm更改為Φ32 mm,管壁厚由1.5 mm 增加至2 mm。根據(jù)故障機尾斜拉桿的尺寸和安裝情況,考慮該機尾斜拉桿的實際剛度損失(側(cè)向50%,垂向60%),計算得到截面尺寸改進后尾斜拉桿安裝頻率,并與改進前的安裝頻率進行對比(表5)。

表5 改進前后的尾斜拉桿安裝頻率計算結(jié)果Table 5 Calculation results of installation frequency of tail control stick before and after improvement
根據(jù)表5 所示,尾斜拉桿改進后,尾斜拉桿側(cè)向和垂向安裝頻率均有明顯下降,其中側(cè)向1 階安裝頻率降低至45.3 Hz,垂向1 階安裝頻率降低至44.3 Hz,其余各階安裝頻率均在100 Hz 以上,改進后尾斜拉桿的各階安裝頻率均避開了機體的主要激勵頻率,達到了預(yù)期的目標。
5 試驗結(jié)果驗證
為了驗證改進后的尾斜拉桿是否可以有效改善和解決腳蹬高頻振動問題,開展改進后尾斜拉桿裝機動特性試驗和飛行試驗。
基于試驗的實際條件,尾斜拉桿安裝動特性試驗采用單點激勵多點拾振的測試方案,沿尾斜拉桿軸線均勻布置3 個測點,試驗在地面正常停機狀態(tài)下,采用錘擊法進行激勵,分別沿著3 個測點進行側(cè)向和垂向激勵,同時采集3 個測點的振動水平,利用LMS 模態(tài)測試軟件分析得到尾斜拉桿垂向和側(cè)向的安裝頻率。為了進一步驗證解決方案的有效性,在腳蹬上安裝1 個三向加速度傳感器并開展飛行振動測試,實測飛行中腳蹬的實際振動水平。
尾斜拉桿改進后安裝頻率測試結(jié)果如表6 所示,其腳蹬飛行振動測試結(jié)果如圖20 所示。根據(jù)改進后尾斜拉桿裝機動特性和飛行試驗結(jié)果。改進后的尾斜拉桿頻率避開尾槳1 階通過頻率,腳蹬航向53.6 Hz 振動水平從之前1.9g 降低至0.6g 左右,同時飛行員反饋腳蹬高頻振動有明顯改善。這不僅驗證了該解決措施的有效性,也從另一方面證明了腳蹬高頻振動問題是由于尾斜拉桿安裝動特性不佳導(dǎo)致尾斜拉桿局部共振引起。
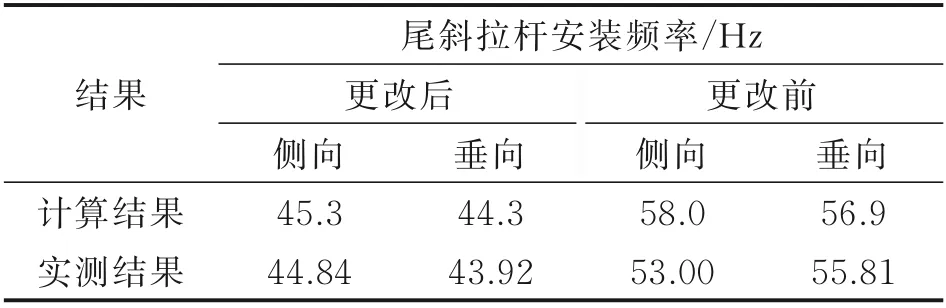
表6 改進前后尾斜拉桿安裝頻率實測結(jié)果與計算結(jié)果對比Table 6 Comparison between theoretical results and test results of installation frequency of tail control stick before and after improvement
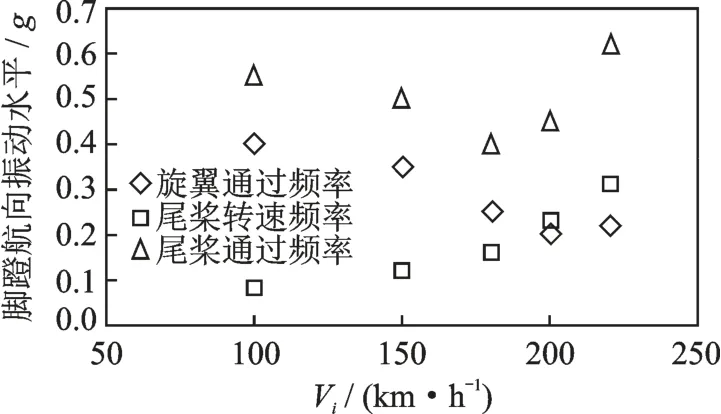
圖20 尾斜拉桿改進后腳蹬航向振動水平Fig.20 Pedal course vibration level of tail control stick after improvement
6 結(jié) 論
本文針對某型機腳蹬高頻振動問題,分析確定了高頻振動問題產(chǎn)生的原因,針對邊界約束對尾斜拉桿安裝頻率的影響建立理論模型進行分析,并基于計算分析結(jié)果提出解決方案,經(jīng)尾斜拉桿安裝動特性試驗和飛行試驗驗證,得出如下結(jié)論:
(1)腳蹬高頻振動問題是由于尾斜拉桿側(cè)向安裝頻率靠近尾槳一階通過頻率導(dǎo)致尾斜拉桿局部共振引起。
(2)邊界約束對于操縱拉桿的安裝頻率有較大影響,相比理想邊界狀態(tài),考慮邊界約束影響時,操縱拉桿垂向簡支狀態(tài)下支撐剛度損失約60%;側(cè)向固定狀態(tài)下支撐剛度損失約50%~78%,因此在進行操縱拉桿設(shè)計時應(yīng)充分考慮邊界約束對操縱拉桿安裝頻率的影響。
(3)邊界約束中彈性剛度對于操縱拉桿安裝頻率影響較大,而扭轉(zhuǎn)剛度對其影響稍小。當(dāng)彈性剛度較小時,操縱拉桿安裝頻率對彈性剛度變化非常敏感,隨著彈性剛度增大,安裝頻率對彈性剛度變化敏感度才會逐漸降低。另外邊界約束對操縱拉桿安裝頻率的影響隨著模態(tài)階數(shù)增大而增大,而且當(dāng)兩端支撐剛度相差較大時,操縱拉桿安裝頻率主要受到支撐剛度較大一端的影響。
(4)本文基于Rriz法建立的參數(shù)化理論模型經(jīng)驗證計算結(jié)果與試驗結(jié)果均有較好的一致性,分析精度滿足工程研制的實際需求,同時理論模型分析可以有效評估邊界約束對尾斜拉桿安裝頻率的影響,適合外場分析使用,為后續(xù)操縱拉桿研制優(yōu)化以及外場類似振動問題分析提供了思路和可行的分析方法。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38