一種天然氣智慧站場泄漏檢測方法
2021-05-06 01:06:22錢濟人
云南化工 2021年2期
丁 楠,陳 浩,童 歆,錢濟人
(1.浙江浙能天然氣運行有限公司,浙江 杭州 310000;2.浙江浙能天然氣管網有限公司,浙江 杭州 310051;3.浙江大學,浙江 杭州 310058)
隨著天然氣管道規模化建設和互聯網+、大數據、云計算等新一代信息技術的迅速發展,巡檢機器人成為管道企業推行智慧站場的重要手段。機器人現場檢漏可有效保障人員安全、提高人力資源利用率,很多管道企業正在積極探索使用[1-3]。巡檢機器人具備圖像識別、紅外熱成像、氣體狀態檢測等功能,能夠在工業環境下完成生產運行的監控、工況風險識別等工作[4]。現有的天然氣泄漏的巡檢應用中,并未對站場設備的風險進行全面的評價,對站場的風險沒有整體考慮,巡檢機器人的激光傳感器的掃描路徑沒有針對性。此外,泄漏云團的大小和在空間的分布區域與各個設備區域的流量、溫度、高度等生產數據密切相關,在激光巡檢掃描的角度選擇上沒有考慮到各個設備區域的生產數據之間的差異,容易使激光傳感器無法掃描到泄漏云團,造成漏檢,從而存在安全隱患。針對上述問題,通過對管道完整性管理要求和人工智能技術調研,提出了一種基于風險評價和凸優化理論的天然氣站場泄漏檢測方法,為優化智慧站場智能巡檢工作提供參考。
1 方法設計
基于風險評價和凸優化理論的天然氣站場泄漏檢測方法的示意圖見圖1。通過天然氣站場生產缺陷數據建立天然氣站場失效數據庫,分別計算設備失效概率和失效后果,得出設備失效的風險值,建立天然氣站場設備失效數據庫,按照風險等級嚴重程度確定巡檢機器人上的激光傳感器的掃描頻次。根據生產數據參數進行K-means聚類,確定不同設備泄漏云團的差異,確定約束條件,利用凸優化理論求解激光傳感器掃描角度。最終實現巡檢機器人對站場設備的精準泄漏檢測。
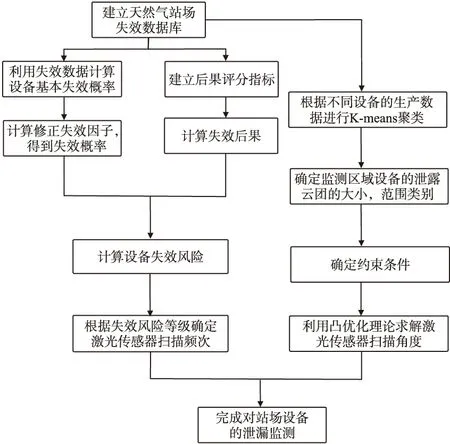
圖1 基于風險評價和凸優化理論的天然氣站場泄漏檢測方法示意圖
2 關鍵應用技術
2.1 搭載可調諧二極管激光吸收光譜技術測甲烷
可調諧二極管激光吸收光譜技術(TDLAS)[5-8],主要是通過改變可調諧半導體激光器的電流來控制激光器的譜線寬度,進而分辨單個或多個分子距離很近的吸收線;通過每個激光波長掃描的待測氣體吸收峰都包含被測氣體信息的吸收譜線,同時也排除了其他干擾氣體的背景譜線。它的本質是利用被測氣體對光波的選擇吸收,從而產生吸收光譜的特性來對氣體進行分析,具有高分辨率、高靈敏度等特點,在氣體泄露檢測方面應用廣泛。搭載TDLAS激光傳感器檢測甲烷的濃度實質上是基于對甲烷氣體特征吸收譜線的測量,工作原理見圖2。
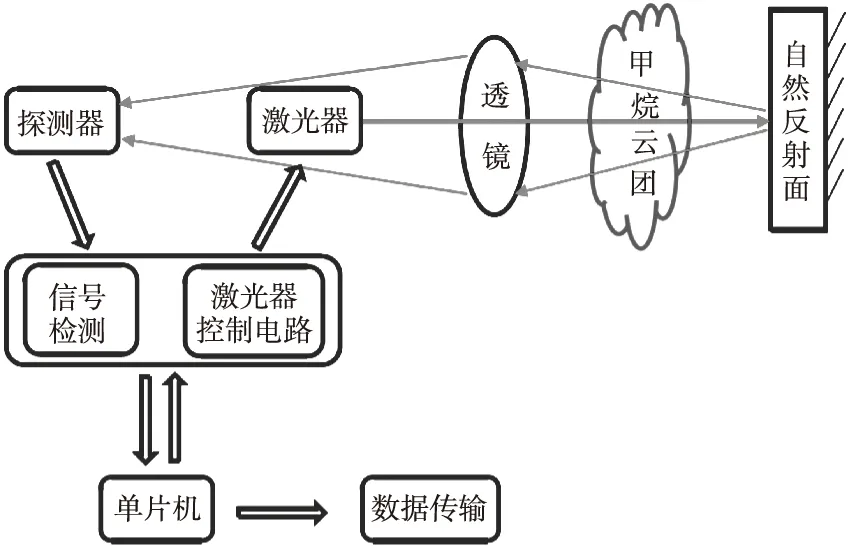
圖2 TDLAS激光傳感器的工作原理圖
2.2 利用風險評價確定掃描頻次
風險評價是以實現系統安全為目的,對系統中潛在的危害因素進行識別、分析,判斷系統發生事故的可能性以及危害程度,為制定防范措施和安全管理決策提供科學依據的方法[9]。計算失效可能性與失效后果的乘積得到風險值,根據風險值劃分風險等級,是常用的風險評價方法。
將ERP系統、安健環系統收集的天然氣站場動設備的數據,主要包括工藝管道、閥門、分離器、清管器收發球筒、儀器儀表等缺陷,進行歸類、分析、整理各類故障發生及處理的歷史記錄,建立天然氣站場失效數據庫。
根據天然氣站場失效數據庫對天然氣站場各類設備進行風險評價,采用失效概率和失效后果兩個維度的指標進行劃分,具體包括以下步驟:
1)根據失效數據庫進行風險評價,根據天然氣站場失效數據庫的失效數據獲得由失效因素q引起的失效概率,將其作為基本失效概率Rq;通過失效概率修正因子Fq對基本失效概率Rq進行修正,計算得到評價天然氣站場內設備由失效因素q引起的失效概率Pq;各個失效因素的失效概率相加,得到相應設備的失效概率P。
其中,Fq為失效因素q對應的失效概率修正因子,失效概率修正因子可以考慮到站場設備當前的實際運行情況,對基本失效概率進行修正,使失效概率符合實際情況;m為失效因素的個數。
2)設備的失效后果評估采用評分模型,其計算公式為:
Cof=PH*LV*DS*RT
其中,Cof表示失效后果總分,PH表示介質危害性評分,LV表示泄漏量評分,DS表示擴散情況評分,RT表示危害受體評分。
將設備的失效概率和失效后果作為數據的兩維特征,構成數據集;對數據集進行聚類,對設備的風險劃分為數個風險等級。
3)將設備的失效概率和失效后果作為數據的兩維特征,結合起來進行風險評價。首先建立無標簽數據集X。
其中,x1、x2、x3、…、xm均表示數據的特征,且均為二維向量,包括失效概率和失效后果兩個特征。
其次,對數據集進行聚類。數據集的數據x為二維數據,包括x1、x2、x3、…、xm;將數據集聚類為k個簇C1、C2、…、Ck,k取值為4。4個簇分別代表了風險等級為高風險、較高風險、中風險、低風險四個風險等級。
最小化損失函數為:
式中,x為數據集的數據;μi為簇的中心點,其計算公式:
其中,簇的中心點選取,包括:
在站場設備樣本中隨機選取4個樣本點充當各個簇的中心點;{μ1,μ2,…,μi}
分別計算所有站場設備樣本點與四個簇中心點之間的距離dist(xi,μi),將樣本點劃入離簇中心最近的簇中;
根據簇中所有的樣本點,計算簇中心;
重復上述中心點選取步驟,直到迭代更新后聚類結果保持不變。
最后,根據風險值情況將站場內設備的風險劃分為了高風險、較高風險、中風險和低風險4個風險等級。
根據天然氣站場內各設備的流速、流量、位置高度、壓力和溫度5類運行數據進行K-means聚類,具體包括:
各設備的運行數據y為5維數據,包括y1、y2、y3、…、yr,r為設備的數量;
將數據集聚類為n個簇C1、C2、…、Cn,n取值為大于1的整數;
最小化損失函數為:
式中,y為設備的運行數據;μi為簇的中心點,其計算公式:
其中,簇的中心點選取,包括:在站場設備樣本中隨機選取n個樣本點充當各個簇的中心點;分別計算所有站場設備樣本點與n個簇中心點之間的距離,將樣本點劃入離簇中心最近的簇中;根據簇中所有的樣本點,計算簇中心;重復中心點選取步驟,直到迭代更新后聚類結果保持不變,從而將站場設備劃分為n類。
2.3 選用凸優化理論計算掃描角度
凸優化理論[10]的核心工具是Lagrange對偶,它為凸優化問題的解的最優性,從而為設計有效的凸優化算法提供了保證。云計算、大數據等研究的興起和發展為凸優化提供很好的應用,一般而言大量的應用問題都在努力地規約或近似未凸優化問題。這樣可以很好地應用凸優化算法,即使問題本身是非凸的。相關的有效應用的案例大大地擴展了凸優化的應用范圍,如數據處理、機器學習、經濟管理和機器學習等包括計算、分析以及工程研究許多領域。
根據設備的分類確定相應的激光傳感器的激光掃描角度,以TDLAS激光傳感器能接收到其發射的激光的反射作為約束條件,并以其發射的激光到反射面之間的實際激光光程最短為目標,利用凸優化理論的KTT條件得到激光傳感器的激光掃描角度,示意圖見圖3。
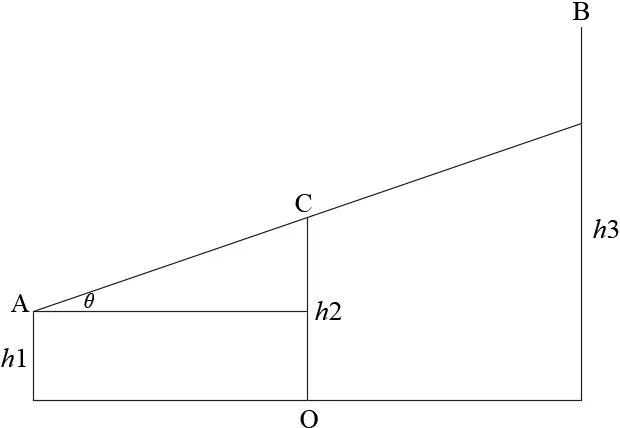
圖3 激光掃描角度示意圖
計算過程如下:
標準約束化問題:minf(θ)
s.t.g(θ)=0
h(θ)<=0
Lagrangian函數:L(θ,λ,μ)=f(θ)+λg(θ)+μh(θ)
h(θ)=h1+b*tan(θ)-h3
根據KTT條件,即可得到激光掃描角度θ。
其中,c為激光掃描的最遠距離,h1為TDLAS激光傳感器A的高度,h2為泄漏云團中心高度(泄漏點O至泄漏云團中心C之間的距離),h3為反射面B的高度,a為激光傳感器距離泄漏點的水平距離,b為激光傳感器距離反射面的水平距離,λ、μ為拉格朗日乘子。
2.4 實現高效精準檢測
通過上述設計,不同設備掃描傾斜角度和距離得到合理的計算,同時根據不同的風險等級確定相應的掃描頻次,風險等級越高,掃描頻次增加,實現高效精準檢測。
3 結語
針對天然氣智慧站場對站場泄漏智能化檢測的更高要求,設計并探索了風險評價技術、TDLAS技術和人工智能算法在巡檢機器人泄漏檢測方面的應用:一是將風險評價和站場泄漏檢測結合起來,實現風險分級高效檢測;二是利用人工智能的方法對不同設備之間的泄漏云團大小進行聚類,有利于檢測的智能化,利用凸優化的KTT條件的方法,計算出合理的掃描傾斜角度和激光傳感器距離站場設備的位置,為智慧站場建設提供技術參考。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00