考慮攪拌筒動態(tài)質(zhì)心的攪拌車抗側(cè)翻控制研究
2021-05-06 14:50:20干年妃雷富強周兵吳曉建李濤柴天
湖南大學學報·自然科學版 2021年4期
干年妃 雷富強 周兵 吳曉建 李濤 柴天


摘 ? 要:轉(zhuǎn)彎工況下,由于攪拌筒的回轉(zhuǎn)及自身轉(zhuǎn)彎離心力的共同作用,攪拌車容易側(cè)翻. 本文針對此問題開展攪拌筒動態(tài)質(zhì)心和攪拌車側(cè)翻穩(wěn)定性研究. 首先利用EDEM軟件模擬混凝土在運輸過程中的運動,經(jīng)過計算、擬合獲得質(zhì)心位置變化的數(shù)學模型,將建立的質(zhì)心位置變化模型與攪拌筒各支承力的關系應用于多體動力學仿真中,分析動態(tài)質(zhì)心位置變化對攪拌車側(cè)翻穩(wěn)定性的影響. 然后,基于差動制動理論,提出一種融合改進粒子群優(yōu)化算法的自整定PID抗側(cè)翻控制算法,研究結果表明,考慮動態(tài)質(zhì)心的影響時,攪拌車更容易側(cè)翻;自整定PID算法迭代尋優(yōu)次數(shù)較傳統(tǒng)粒子群算法降低33.3%,能更加快速的尋找到最優(yōu)的控制參數(shù). 最后,通過角階躍工況、Fishhook工況對提出的抗側(cè)翻控制算法有效性進行驗證,結果顯示,自整定PID控制算法能更有效地防止攪拌車的側(cè)翻,提高攪拌車側(cè)翻穩(wěn)定性.
關鍵詞:攪拌車;動態(tài)質(zhì)心;PID控制;抗側(cè)翻控制
中圖分類號:U469.6 ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標志碼:A
Research on Anti-Rollover Control of Mixing Truck
Considering Dynamic Mass Center of Mixing Drum
GAN Nianfei1,LEI Fuqiang1,ZHOU Bing1,WU Xiaojiang2,LI Tao1,CHAI Tian1
(1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,
Hunan University,Changsha 410082,China;
2. School of Mechatronics Engineering,Nanchang University,Nanchang 330031,China)
Abstract:Under turning conditions,due to the combined action of the concrete flow in the mixer drum of the mixer truck and the turning centrifugal force,the mixer truck is easy to roll over. In response to this problem, the dynamic mass center of the mixer drum and the stability of the mixer truck rollover were studied. On the basis of using EDEM software to simulate the movement of concrete during transportation, a mathematical model of the position change of the center of mass is obtained through calculation and fitting, and the relationship between the position change of the center of mass and the centrifugal force and the supporting force of the mixing drum is applied to the multi-body dynamics simulation. The influence of the dynamic mass center ?position change on the rollover stability of the mixer is analyzed. Then, based on the differential braking theory, a self-tuning PID anti-rollover control algorithm optimized by improved particle swarm optimization is proposed. The research results show that when considering the influence of the dynamic center of mass, the mixer truck is more likely to roll over; the self-tuning PID algorithm iterative optimization times is reduced by 33.3%, and the optimal control parameters can be found more quickly. Finally, the effectiveness of the proposed anti-rollover control algorithm is verified through angle step conditions and Fishhook conditions. The results show that the self-tuning PID control method can more effectively prevent the rollover of the mixer truck and improve the stability of the mixer truck.
Key words:mixer truck;dynamic center of mass;PID control;anti-rollover control
近年來,重型商用車由于側(cè)翻事故造成的傷亡人數(shù)逐漸遞增. 攪拌車作為一種特殊的重型商用車,一方面,質(zhì)量大、質(zhì)心高、車身較長,導致控制困難;另一方面,攪拌筒在行車過程中動態(tài)運轉(zhuǎn),帶動混凝土使其重心向轉(zhuǎn)動方向偏移,對底盤造成偏心載荷. 特別地,在轉(zhuǎn)彎過程中,混凝土因其流動性及離心力的影響,造成載荷外移,且伴有動態(tài)沖擊,速度稍高時,車輛的側(cè)傾穩(wěn)定性變差,易引發(fā)側(cè)翻事故. 因此,研究攪拌筒動態(tài)質(zhì)心變化并分析其對攪拌車側(cè)翻穩(wěn)定性的影響,進行攪拌車抗側(cè)翻控制,提高攪拌車側(cè)翻穩(wěn)定性具有重要意義.
學者們對混凝土的攪拌過程、攪拌機理以及商用車側(cè)傾穩(wěn)定性與防側(cè)翻控制做了大量的研究. Tan[1]、Cao[2]、Xiao[3-4]、Deng[5-8]等人所在的課題組根據(jù)離散單元法(DEM)對混凝土運動進行了深入的研究,分析了混凝土與混凝土之間、混凝土與攪拌筒壁之間的相互作用,進一步研究了攪拌筒的攪拌機理. 并且,對混凝土攪拌的影響因素、離析的問題都做了深入的探索. Sankar[9]等人對車輛進行靈敏度分析,得到影響側(cè)翻的部分參數(shù),通過優(yōu)化參數(shù)提高車輛的側(cè)傾穩(wěn)定性. 隨著計算機技術、非線性動力學的發(fā)展,在車輛的穩(wěn)定研究過程中引入各種非線性穩(wěn)定理論[10-13]. Yoon等[14]考慮各種動力學約束,通過繪制側(cè)傾角-側(cè)傾角速度相平面來分析車輛的穩(wěn)定性區(qū)域分布. 金智林[15]等人將設計的駕駛員模型融合到多自由度的汽車側(cè)翻動力學模型構成人-車閉環(huán)系統(tǒng),分析了駕駛員對汽車側(cè)翻穩(wěn)定性的影響,進行了防側(cè)翻控制研究. Goldman[16]等人采用側(cè)向加速度、側(cè)傾角與預設的閾值作比較來判斷側(cè)翻. Riofrio等[17]采用動態(tài)門限值橫向載荷轉(zhuǎn)移率為側(cè)翻評價指標. Hyun等[18]在考慮車輛的非線性、模型參數(shù)辨識的基礎上,利用橫向載荷轉(zhuǎn)移率作為側(cè)翻指標. Chen等[19]提出運用側(cè)翻預警時間作為側(cè)翻指標(TTR),提高TTR精度的同時,實現(xiàn)了動態(tài)預警. Li[20-26]等人結合滑模控制、模型預測控制(MPC)等設計主動前輪轉(zhuǎn)向(AFS),橫擺力矩控制(DYC)防側(cè)翻策略.
以往研究者們的重點主要是攪拌車自身結構優(yōu)化、攪拌筒的攪拌機理及混凝土運動過程的探索. 缺乏對攪拌筒的動態(tài)質(zhì)心運動分析且將其考慮到攪拌車的側(cè)翻控制中去的研究,忽略混凝土自身的流動性和攪拌筒轉(zhuǎn)動引起的動態(tài)質(zhì)心偏移對攪拌車的側(cè)傾穩(wěn)定性影響.
為提高攪拌車的側(cè)翻穩(wěn)定性,本文考慮攪拌筒動態(tài)質(zhì)心,結合離散元法建立數(shù)學模型并創(chuàng)新應用方法,提出一種基于差動制動,改進粒子群算法融合PID控制決策對車輪施加制動力的抗側(cè)翻控制策略. 利用EDEM軟件對混凝土的攪拌運動進行模擬,輸出混凝土的質(zhì)心位置數(shù)據(jù),擬合得到混凝土的動態(tài)質(zhì)心數(shù)學模型. 而后,建立攪拌筒動態(tài)質(zhì)心的位置變化與攪拌筒支承力的關系,施加到Adams car多體動力學整車模型仿真中,分析其對攪拌車穩(wěn)定性的影響. 最終,采用電子機械制動系統(tǒng)(EMB)對車輪施加制動力,以差動制動為理論依據(jù),橫向載荷轉(zhuǎn)移率(LTR)為側(cè)翻指標,設計了一種與智能優(yōu)化算法結合的自整定PID抗側(cè)翻控制系統(tǒng). 防側(cè)翻控制仿真分析結果證明了本文方法的有效性.
1 ? 攪拌筒動態(tài)質(zhì)心建模及分析
1.1 ? 攪拌筒動態(tài)質(zhì)心建模
攪拌車行駛過程中,混凝土在攪拌筒內(nèi)的運動狀態(tài)很復雜. 以往的研究大多數(shù)是通過對混凝土的復雜流動狀態(tài)進行簡化,建立比較簡單的數(shù)學模型來表征攪拌筒質(zhì)心的動態(tài)變化. 一方面,由于純粹的數(shù)學推導限制,建立的數(shù)學模型忽略了很多實際因素;另一方面,這些模型根據(jù)理論建立之后沒有進一步地應用到整車分析中去. 由于數(shù)據(jù)條件所限,本文選擇攪拌車滿載時的情況,根據(jù)國標對普通混凝土的試驗要求[27],基于離散單元法(Discrete Element
Method)理論,通過EDEM軟件對混凝土的攪拌運動進行模擬,輸出混凝土的質(zhì)心位置數(shù)據(jù). 在此基礎之上,利用計算機輔助,擬合數(shù)據(jù)得到攪拌筒質(zhì)心各個方向的位移隨時間變化的數(shù)學模型. 該模型與之前的純數(shù)學理論推導相比,在一定程度上能更好地反映攪拌車在實際運輸過程中攪拌筒質(zhì)心的動態(tài)變化,為攪拌車的研究設計提供更加真實可靠的依據(jù).
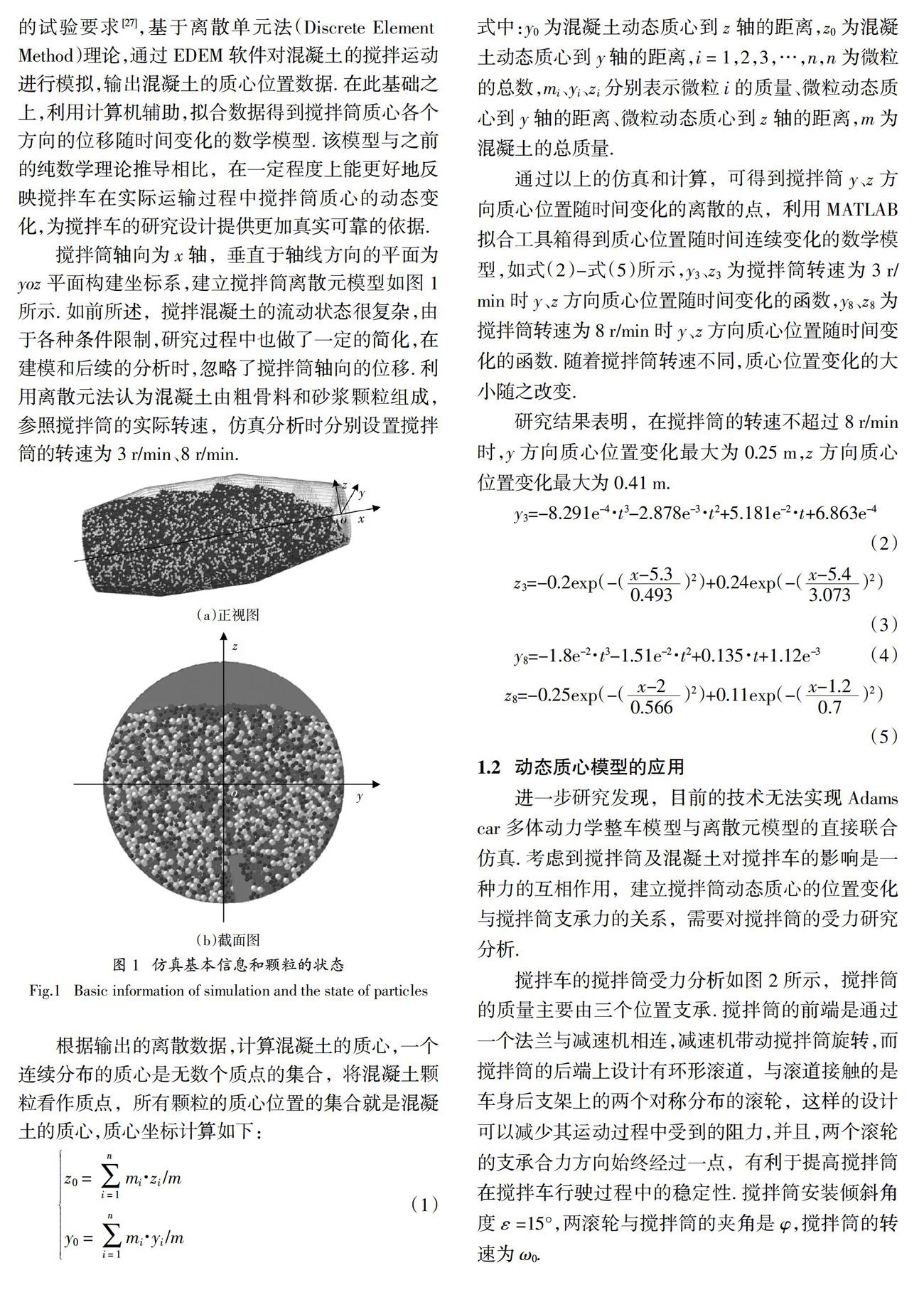
攪拌筒軸向為x軸,垂直于軸線方向的平面為yoz平面構建坐標系,建立攪拌筒離散元模型如圖 1所示. 如前所述,攪拌混凝土的流動狀態(tài)很復雜,由于各種條件限制,研究過程中也做了一定的簡化,在建模和后續(xù)的分析時,忽略了攪拌筒軸向的位移. 利用離散元法認為混凝土由粗骨料和砂漿顆粒組成,參照攪拌筒的實際轉(zhuǎn)速,仿真分析時分別設置攪拌筒的轉(zhuǎn)速為3 r/min、8 r/min.
根據(jù)輸出的離散數(shù)據(jù),計算混凝土的質(zhì)心,一個連續(xù)分布的質(zhì)心是無數(shù)個質(zhì)點的集合,將混凝土顆粒看作質(zhì)點,所有顆粒的質(zhì)心位置的集合就是混凝土的質(zhì)心,質(zhì)心坐標計算如下:
式中:y0為混凝土動態(tài)質(zhì)心到z軸的距離,z0為混凝土動態(tài)質(zhì)心到y(tǒng)軸的距離,i = 1,2,3,…,n,n為微粒的總數(shù),mi、yi、zi分別表示微粒i的質(zhì)量、微粒動態(tài)質(zhì)心到y(tǒng)軸的距離、微粒動態(tài)質(zhì)心到z軸的距離,m為混凝土的總質(zhì)量.
通過以上的仿真和計算,可得到攪拌筒y、z方向質(zhì)心位置隨時間變化的離散的點,利用MATLAB擬合工具箱得到質(zhì)心位置隨時間連續(xù)變化的數(shù)學模型,如式(2)-式(5)所示,y3、z3為攪拌筒轉(zhuǎn)速為3 r/min時y、z方向質(zhì)心位置隨時間變化的函數(shù),y8、z8為攪拌筒轉(zhuǎn)速為8 r/min時y、z方向質(zhì)心位置隨時間變化的函數(shù). 隨著攪拌筒轉(zhuǎn)速不同,質(zhì)心位置變化的大小隨之改變.
研究結果表明,在攪拌筒的轉(zhuǎn)速不超過8 r/min時,y方向質(zhì)心位置變化最大為0.25 m,z方向質(zhì)心位置變化最大為0.41 m.
1.2 ? 動態(tài)質(zhì)心模型的應用
進一步研究發(fā)現(xiàn),目前的技術無法實現(xiàn)Adams car多體動力學整車模型與離散元模型的直接聯(lián)合仿真. 考慮到攪拌筒及混凝土對攪拌車的影響是一種力的互相作用,建立攪拌筒動態(tài)質(zhì)心的位置變化與攪拌筒支承力的關系,需要對攪拌筒的受力研究分析.
攪拌車的攪拌筒受力分析如圖 2所示,攪拌筒的質(zhì)量主要由三個位置支承. 攪拌筒的前端是通過一個法蘭與減速機相連,減速機帶動攪拌筒旋轉(zhuǎn),而攪拌筒的后端上設計有環(huán)形滾道,與滾道接觸的是車身后支架上的兩個對稱分布的滾輪,這樣的設計可以減少其運動過程中受到的阻力,并且,兩個滾輪的支承合力方向始終經(jīng)過一點,有利于提高攪拌筒在攪拌車行駛過程中的穩(wěn)定性. 攪拌筒安裝傾斜角度ε =15°,兩滾輪與攪拌筒的夾角是φ,攪拌筒的轉(zhuǎn)速為ω0.
在對攪拌車的攪拌筒力學分析前,做以下假設:所有的軸承內(nèi)圈安裝與其他的物體配合緊密,并且,不會發(fā)生相對滑動;忽略軸承座的加工安裝誤差;無軸承游隙誤差,滾道接觸處于彈性變形范圍;轉(zhuǎn)動的攪拌筒假想為空心軸,運動過程中有彈性變形時,其截面形狀和截面幾何尺寸永遠不發(fā)生變化.
如圖 2所示,根據(jù)物體的受力平衡,有如下力平衡方程:
式中:偏距y0、z0分別在我們前面工作中對攪拌筒質(zhì)心的動態(tài)坐標公式的研究中已經(jīng)求出,G0、F0分別為攪拌筒工作時的重力和離心力,F(xiàn)z2、Fa分別為左端軸承的徑向力和軸向力,F(xiàn)z1為滾輪的支承力(左右滾輪支承力Fz11和Fz12的合力),b0為左端支承到重心的距離,b2為左端支承到攪拌筒最右端的距離,b1為右端支承到攪拌筒最右端的距離.
2 ? 混凝土攪拌運輸車轉(zhuǎn)彎時穩(wěn)定性分析
基于建立的Adams car多體動力學整車模型,如圖 3所示,將1.2節(jié)計算出來的作用力施加到左端支承位置和右端兩滾輪支承位置,理論上攪拌筒以不同的轉(zhuǎn)速運動時,對車輛的穩(wěn)定性產(chǎn)生不同程度的影響. 轉(zhuǎn)向盤角階躍輸入工況和Fishhook工況下,根據(jù)混凝土攪拌運輸車現(xiàn)實的運輸情景,分別在0 r/min、3 r/min、8 r/min的攪拌筒轉(zhuǎn)速下進行仿真分析,兩種試驗工況行駛速度均為45 km/h,方向盤轉(zhuǎn)角輸入如圖 4所示,后文兩種工況下的方向盤轉(zhuǎn)角不變.
仿真分析結果如圖 5-圖 7所示,由圖可知,隨著混凝土攪拌筒轉(zhuǎn)速的升高,攪拌車的側(cè)向加速度、側(cè)傾角、側(cè)向位移明顯增大. 攪拌筒轉(zhuǎn)速為8 r/min時,側(cè)向加速度與3 r/min時的最大差距達到約500 mm/s2,且側(cè)向加速度、側(cè)傾角的波動比較劇烈,側(cè)向位移明顯增大. 仿真結果表明,攪拌筒轉(zhuǎn)速較高時,攪拌車轉(zhuǎn)彎的時候側(cè)翻穩(wěn)定性降低,如果此時的行駛速度再增加,車輛很容易發(fā)生側(cè)翻. 因此,攪拌車在轉(zhuǎn)彎的時候一定要注意減速慢行.
3 ? 考慮攪拌筒質(zhì)心動態(tài)變化的攪拌車抗側(cè)翻
控制
3.1 ? 側(cè)翻評價指標
目前應用廣泛的側(cè)翻評價指標大致可分為基于靜態(tài)門限值和動態(tài)門限值兩類. 前者主要通過分析車輛的側(cè)向加速度、側(cè)傾角等靜態(tài)參數(shù)進行側(cè)翻預測;后者則需要考慮車輛動力學特性,且具有實時性,大部分都是以動態(tài)門限值橫向載荷轉(zhuǎn)移率為側(cè)翻評價指標. 考慮到側(cè)翻檢測的準確性和精度,以橫向載荷轉(zhuǎn)移率為側(cè)翻評價指標,定義如式(9)所示.
式中:LTR為橫向載荷轉(zhuǎn)移率,F(xiàn)z1為車輛的第i橋左邊車輪的垂直載荷,F(xiàn)zr為車輛的第i橋右邊車輪的垂直載荷,n為車橋的總數(shù).
角階躍試驗,F(xiàn)ishhook試驗工況下考慮攪拌筒動態(tài)質(zhì)心影響的臨界側(cè)翻車速分別是58 km/h和55 km/h,實測橫向載荷轉(zhuǎn)移率的結果如圖 8所示,由圖 8可知,在不考慮攪拌筒動態(tài)質(zhì)心影響時,攪拌車沒有達到臨界側(cè)翻狀態(tài),角階躍試驗工況橫向載荷轉(zhuǎn)移率最大值是0.87,F(xiàn)ishhook試驗工況下最大值0.796,最小值-0.726. 結果表明,攪拌筒動態(tài)運轉(zhuǎn)對攪拌車的側(cè)翻穩(wěn)定性影響較大.
3.2 ? 改進粒子群算法參數(shù)整定優(yōu)化PID控制系統(tǒng)
粒子群優(yōu)化算法(Particle Swarm Optimization簡稱PSO)是由Eberhart和Kennedy提出的一種進化計算技術,源于對鳥群捕食的行為研究. 該算法最初是受到飛鳥集群活動的規(guī)律性啟發(fā),進而利用群體智能建立的一個簡化模型. 粒子群算法在對動物集群活動行為觀察基礎上,利用群體中的個體對信息的共享使整個群體的運動在問題求解空間中產(chǎn)生從無序到有序的演化過程,從而獲得最優(yōu)解[28].
實際應用中,PSO的基本思想是首先進行初始化,得到一群隨機的粒子(隨機解). 進而,經(jīng)過多次迭代計算獲得問題的最優(yōu)解. 計算過程中的每一次迭代,粒子都會通過跟蹤到的個體極值(Personal best)和全局極值(Global best),以式(10)、式(11)為依據(jù)進行速度和位置的更新. 如圖 9所示,基本粒子群算法流程.
Vk+1jd =ωVkjd +c1 r1(P kjd -Xkjd )+c2 r2(P kgd -Xkjd ) ? ?(10)
Xk+1jd ?= Xkjd ?+ Vk+1jd ? ? ? ?(11)
式中:粒子j在d維空間里的位置用矢量表示Xjd,飛行速度矢量表示Vjd,ω為權重因子,r1、r2是介于(0,1)之間的隨機數(shù),c1、c2是學習因子,Pjd、Pgd分別是個體極值和全局極值,k是迭代次數(shù).
之前的研究表明,慣性權重ω越大,粒子飛行速度越大,粒子將會以更長的步長進行全局搜索;ω較小,則粒子步長小,趨向于精細的局部搜索;因此,學者們期望尋找到一個動態(tài)變化的ω值,如式(12)、式(13)所示,使算法在初期的隨機搜索中具有較強的全局搜索能力,隨著迭代次數(shù)的變化,算法后期具有較強的局部搜索能力,使算法在更短時間內(nèi)尋找到全局最優(yōu). 但是,式(12)的權值是線性變化的,缺乏動態(tài)的變化速率,使得分配在全局和局部搜索能力較強的迭代次數(shù)基本一樣. 因此,在尋找全局最優(yōu)值和對其逼近的時候比較困難. 式(13)表示的權值在前期變化速率太大,很可能導致全局搜索迭代次數(shù)太少而尋優(yōu)陷入局部極值. 經(jīng)過驗證,這兩種方式在應用時比較困難.
考慮到以上提到的問題、系統(tǒng)的自身特點,以及粒子群算法容易陷入局部最優(yōu)的缺點,提出一種服從標準正態(tài)分布的慣性權重,如式(14)所示,從一定程度上增強算法的全局尋優(yōu)能力和局部尋優(yōu)能力,當算法陷入局部最優(yōu)時,能及時修正,減少找到最優(yōu)解的迭代次數(shù).
ω(k) = ωmax - (ωmax - ωmin)k/kmax ? ? ?(12)
ω(k) = ωmin - (ωmax - ωmin) × e-0.6k ? ? ?(13)
ω = δ + τ × N(0,1)δ = ωmax - rand(ωmax - ωmin) ? ? ? (14)
式中:ωmax = 0.9,ωmin = 0.4,τ = 0.5,k是迭代次數(shù),rand是(0,1)之間的隨機數(shù),kmax是最大迭代次數(shù),N(0,1)標準正態(tài)分布.
改進粒子群算法參數(shù)自整定PID控制原理圖如圖 10所示,一方面,自整定PID算法根據(jù)目標參數(shù)偏差輸入的大小決定輸出電壓的大小給差動制動系統(tǒng)中的電子機械制動子系統(tǒng)以產(chǎn)生輪胎制動力;另一方面,改進的智能算法通過性能評價指標對控制效果的實時監(jiān)控,不斷迭代后獲得最優(yōu)的一組PID控制參數(shù)KP、Ki、Kd . 改進的與傳統(tǒng)的粒子群算法應用到系統(tǒng)尋優(yōu)中去,結果如圖 11所示,傳統(tǒng)算法和改進的算法最優(yōu)迭代次數(shù)分別是63次、42次,后者迭代次數(shù)減少33.3%,最優(yōu)結果也很準確,具有較大的優(yōu)勢.
4 ? 側(cè)翻控制仿真分析
聯(lián)合仿真控制系統(tǒng)如圖 12所示,控制系統(tǒng)以橫向載荷率為控制目標,自整定PID根據(jù)目標參數(shù)偏差輸入的大小決定輸出電壓的大小. 基于差動制動理論,當攪拌車因不足轉(zhuǎn)向發(fā)生側(cè)翻時,對二、三橋內(nèi)輪施加制動力;當攪拌車因過多轉(zhuǎn)向發(fā)生側(cè)翻時,對一橋外輪施加制動力. 判斷模塊選擇制動車輪,根據(jù)電壓的值,電子機械制動系統(tǒng)產(chǎn)生車輪制動力矩. 側(cè)翻控制系統(tǒng)實時計算LTR,當LTR大于0.8,進行防側(cè)翻控制;當LTR不大于0.8,自整定PID輸出的電壓不會作用于差動制動系統(tǒng).
抗側(cè)翻控制仿真分析得到的側(cè)傾角和橫向載荷轉(zhuǎn)移率隨時間變化的曲線圖分別如圖 13、圖 14所示,由圖可知,對比未加控制、傳統(tǒng)的PID控制方法、改進的PID控制方法三次聯(lián)合仿真結果,角階躍試驗工況,側(cè)傾角、橫向載荷轉(zhuǎn)移率的最大值分別是7.98°、6.2°、5.6°和1、0.994 7、0.88;Fishhook試驗工況,側(cè)傾角、橫向載荷轉(zhuǎn)移率的最大值分別是11.87°、11.16°、8.72°和1、0.98、0.89. 抗側(cè)翻控制系統(tǒng)的作用下,攪拌車的側(cè)翻穩(wěn)定性都得到了一定程度的提高,使抗側(cè)翻控制系統(tǒng)的有效性得到驗證.
5 ? 結 ? 論
以提高攪拌車的側(cè)翻穩(wěn)定性為目標,深入探索了在攪拌車運輸過程中,攪拌筒質(zhì)心的動態(tài)變化,基于離散元法建立了攪拌筒動態(tài)質(zhì)心數(shù)學模型. 建立攪拌筒動態(tài)質(zhì)心的位置變化與攪拌筒支承力的關系,利用函數(shù)加載到多體動力學整車模型仿真中,分析其對攪拌車側(cè)翻穩(wěn)定性的影響. 進一步以差動制動理論為基礎,設計了傳統(tǒng)PID控制器與改進智能優(yōu)化算法融合的抗側(cè)翻控制系統(tǒng). 最后,角階躍和Fishhook試驗工況下,設計的控制系統(tǒng)應用到攪拌車的抗側(cè)翻控制仿真中驗證有效性,仿真結果顯示,該控制系統(tǒng)在提高攪拌車的抗側(cè)翻穩(wěn)定性方面有較大的優(yōu)勢.
參考文獻
[1] ? ?TAN Y,CAO G,ZHANG H,et al. Study on the thixotropy of the fresh concrete using DEM[J]. Procedia Engineering,2015,102:1944-1950.
[2] ? ?CAO G,ZHANG H,TAN Y,et al. Study on the effect of coarse aggregate volume fraction on the flow behavior of fresh concrete via DEM[J]. Procedia Engineering,2015,102:1820—1826.
[3] ? ?XIAO X,TAN Y,ZHANG H,et al. Experimental and DEM studies on the particle mixing performance in rotating drums:Effect of area ratio[J]. Powder Technology,2017,314:182—194.
[4] ? ?XIAO X,TAN Y,DENG R,et al. Investigation of contact parameters of DEM model in flow process[C]// Proceedings of the 7th International Conference on Discrete Element Methods. Singapore:Springer,singapore,2016:465—473.
[5] ? ?TAN Y,DENG R,F(xiàn)ENG Y T,et al. Numerical study of concrete mixing transport process and mixing mechanism of truck mixer[J]. Engineering Computations,2015,32(4):1041—1065.
[6] ? ?DENG R,TAN Y,ZHANG H,et al. Experimental and DEM studies on the transition of axial segregation in a truck mixer[J]. Powder Technology,2017,314:148—163.
[7] ? ?DENG R,TAN Y,XIAO X,et al. A numerical study of the effect of loading profiles on mixing/segregation of particles in the truck mixer via DEM[C]// International Conference on Discrete Element Methods. Singapore:Springer singapore,2016:967—975.
[8] ? ?DENG R,TAN Y,ZHANG H,et al. Numerical study on the discharging homogeneity of fresh concrete in truck mixer:Effect of motion parameters[J]. Particulate Science and Technology,2016,36:146—153.
[9] ? ?SANKARS,SURIAL S. Sensitivity analysis approach for fast estimation of rollover stability of heavy articulated vehicles during steady state turning [EB/OL]. 1994.
[10] ?KO Y E,LEE J M. Estimation of the stability region of a vehicle in plane motion using a topological approach[J]. International Journal of Vehicle Design,2002,30(3):181—192.
[11] ?YANG X,KANG N. Nonlinear dynamics and lateral stability of tractor semi-trailer vehicle [J]. Journal of Mechanical Engineering,2012,48(8):79—89.
[12] ?YANG P,XIONG L. Stability control strategy design and experiment of distributed electric drive vehicle[J]. Journal of Mechanical Engineering,2013,49(24):128—134.
[13] ?CHEN L,NIE J M,WANG R C,et al. Intelligent control of dynamic performance of vehicle electric power steering and active suspension integrated system[J]. Journal of Mechanical Engineering,2009(6):128—133.
[14] ?YOON J,KIM D,YI K. Design of a rollover index-based vehicle stability control scheme[J]. Vehicle System Dynamics,2007,45(5):459—475.
[15] ?金智林,嚴正華,趙萬忠. 駕駛員影響汽車側(cè)翻穩(wěn)定性機理分析與控制[J]. 機械工程學報,2019(4):109—117.
JIN Z L,YAN Z H,ZHAO W Z. Influences of driver on vehicle rollover stability and anti-roll control [J]. Journal of Mechanical Engineering,2019(4):109—117. (In Chinese)
[16] ?GOLDMAN R W,EL-GINDY M,KULAKOWSKI B T. Rollover dynamics of road vehicles:literature survey[J]. International Journal of Heavy Vehicle Systems,2001,8(2):103—141.
[17] ?RIOFRIO A,SANZ S,BOADA M J L,et al. A LQR-Based controller with estimation of road bank for improving vehicle lateral and rollover stability via active suspension[J]. Sensors,2017,17(10):2318.
[18] ?HYUN D,LANGARI R. Modeling to predict rollover threat of tractor-semitrailers[J]. Vehicle System Dynamics,2003,39(6):401—414.
[19] ?CHEN B C,PENG H. Differential-Braking-Based rollover prevention for sport utility vehicles with human-in-the-loop evaluations[J]. Vehicle System Dynamics,2001,36(4/5):359—389.
[20] ?JIAN W,SHUO C,Binhao L,et al. A human-machine-cooperative-driving controller based on AFS and DYC for vehicle dynamics stability[J]. Energies,2017,10(11):1737.
[21] ?ZHU S,HE Y. A driver-adaptive stability control strategy for sport utility vehicles[J]. Vehicle System Dynamics,2017,55(8):1206—1240.
[22] ?LI L,LU Y S,WANG R R,et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC[J]. IEEE Transactions on Industrial Electronics,2017,64(4):3389—3401.
[23] ?ZHANG Y,KHAJEPOUR A,XIE X. Rollover prevention for sport utility vehicles using a pulsed active rear-steering strategy[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering,2016,230(9):1239—1253.
[24] ?YIM S. Design of a robust controller for rollover prevention with active suspension and differential braking[J]. Journal of Mechanical ence & Technology,2012,26(1):213—222.
[25] ?周兵,邱香,吳曉建,等. 基于UKF車輛狀態(tài)及路面附著系數(shù)估計的AFS控制[J]. 湖南大學學報(自然科學版),2019,46(8):1—9.
ZHOU B,QIU X,WU X J,et al. AFS control based on estimation of vehicle state and road coefficient using UKF method[J]. Journal of Hunan University (Natural Sciences),2019,46(8):1—9. (In Chinese)
[26] ?周兵,田晨,宋義彤,等. 基于路面附著系數(shù)估計的AFS控制策略研究[J]. 湖南大學學報(自然科學版),2017,44(4):16—22.
ZHOU B,TIAN C,SONG Y T,et al. Control strategy of AFS based on estimation of tire-road friction coefficient[J]. Journal of Hunan University(Natural Sciences),2017,44(4):16—22. (In Chinese)
[27] ?普通混凝土力學性能試驗方法標準:GB/T 50081—2002[S]. 北京:中國建筑工業(yè)出版社,2003:1—30.
Standard test method for plain concrete mechanical properties:GB/T 50081—2002[S]. Beijing:China Architecture & Building Press,2003:1—30. (In Chinese)
[28] ?CHAKRABORTY R,SUSHIL R,GARG M L. An improved PSO-based multilevel image segmentation technique using minimum cross-entropy thresholding[J]. Arabian Journal for Science & Engineering,2019,44(4):3005—3020.
收稿日期:2020-08-13
基金項目:國家自然科學基金資助項目(51875184),National Natural Science Foundation of China(51875184);湖南省自然科學基金資助項目(2019JJ40025),Natural Science Foundation of Hunan Province of China(2019JJ40025)
作者簡介:干年妃(1977—),女,湖南岳陽人,湖南大學副教授,博士
通信聯(lián)系人,E-mail:zhou_bingo@163.com