面向ADHD的利用HTC Vive采集手部運動數據的可行性研究
2021-05-07 09:42:44鄧婉婷戰蔭偉
計算機測量與控制 2021年4期
鄧婉婷,戰蔭偉,羅 潔
(1.廣東工業大學 計算機學院,廣州 510006; 2.中山大學 生物醫學工程學院,廣州 510080)
0 引言
注意力缺陷伴多動障礙(ADHD, attention deficit hyperactivity disorder)是一種常見的兒童神經發育障礙,患病率在5%~7%之間[1],表現為注意力不集中、過度活躍和沖動[2]。由于ADHD缺乏具有鑒別意義的病因學或病理學改變,目前醫生主要依靠臨床觀察和評分量表來進行診斷[3]。然而有研究者指出,量表本質上是主觀的,準確性不可靠。無法客觀診斷是導致ADHD患病率長期上升的原因之一[4-6]。因此,如何克服現有診斷方法的不足,為醫生提供客觀、有效的工具來輔助診斷ADHD就成為研究熱點。腦電圖(EEG, electroencephalogram)[7]和連續行為任務測試(CPT, continuous performance task)[8]是目前最流行的客觀工具,但管理成本高、設備昂貴、專業性強。有研究者甚至質疑CPT測試的診斷效用,指出CPT評判指標與家長和教師對注意力不集中和多動沖動行為評分呈弱相關[9]。
近年來,虛擬現實(VR, virtual reality)技術快速發展,性價比不斷提升,因而在兒童精神疾病的診斷中的應用逐漸廣泛,表現出生態效度高、實驗條件可控等優勢[10-11]。使用VR技術可以構建一個視覺、聽覺、觸覺等高度真實的場景,給用戶帶來多種感覺通道的融合體驗。在VR場景中,用戶通過頭戴式顯示器(HMD, head-mounted display)和傳感設備(數據手套、手柄等),就可以身臨其境地與VR系統進行交互,使用戶從一個被動想象者轉變為一個主動、積極學習者,從而有助于研究者觀察個體的行為和發現他們的認知缺陷。近年來,VR技術在ADHD兒童的治療領域的應用也開展起來。由Rizzo等人[12]開發的虛擬教室,提供多感官參與的注意力測試功能,已經成為診斷和表征ADHD患者注意力不集中癥狀的一種有效工具。Adams等人[13]和Bioulac等人[14]通過比較ADHD兒童和正常兒童在虛擬教室環境測試中的注意力表現,發現ADHD兒童持續注意力顯著低于正常兒童。Rodríguez等人[15]與Pollak等人[16]的工作均表明,與傳統的CPT測試相比,基于VR的CPT測試更能有效區分ADHD患者與對照組,而且更受參與者的歡迎。此外,由VR所帶來的沉浸感可以使被試忘記正在接受測試任務而產生更多的自發行為。
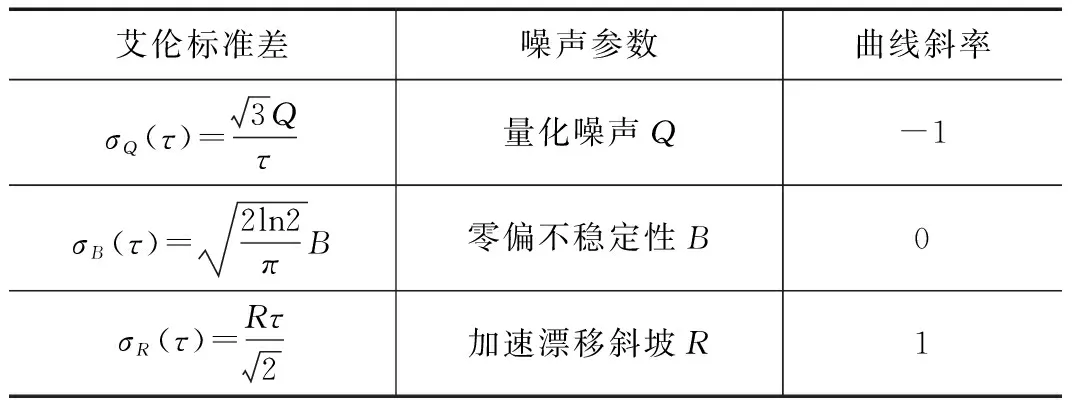
上述研究表明,將虛擬現實技術用于輔助評估ADHD是一種可行且有效的方法。然而,它們只通過測試過程中被試的注意力表象,來衡量其在各種注意力挑戰任務中的反應時間、表現和錯誤情況,而未對他們與VR系統交互過程中的活動水平進行客觀測量。
人體運動能力的客觀測量在輔助醫學診斷中起著重要作用[17-18]。在ADHD的診斷中,臨床指導也鼓勵專業人員收集兒童的行為信息[19]。文獻[20]表明,與對照組相比,多動為ADHD患者的核心特征。早期的研究[21]采用活動記錄儀對被試的活動水平進行監測,發現ADHD患者大多比正常兒童活躍。近期Lin等人[22]通過佩戴在被試手上的智能手表(內含陀螺儀和加速度計)來測量他們在課堂上的手部運動,發現ADHD患者比對照組手部動作變化速度更快、頻率更高。手作為人體主要的運動器官,在與VR系統的交互過程中扮演著重要角色,被試可通過系統提供的實時視覺反饋來引導手部運動。因此,我們有必要深入探討ADHD患者與對照組在視覺反饋引導下的手部交互過程中的運動差異,充分利用VR系統中的運動捕捉功能,實時采集被試在VR環境中的手部交互運動數據,即手部的空間位置坐標,用于量化被試的手部運動,輔助醫生進行ADHD的客觀診斷。
HTC Vive是一款集頭戴式顯示設備和運動捕捉為一體的虛擬現實系統[23],與市面上主流的運動捕捉系統如VICON、OptiTrack相比,具有體積小、便于攜帶、價格低廉等優點,因而受到眾多研究人員的青睞[24]。HTC Vive系統由三大類部件組成:一個頭戴式顯示器、一對手持控制器、兩個激光發射器。
HTC Vive系統可以實時追蹤定位手持控制器的位置和方向,手持控制器在虛擬空間中的真實運動同時又可以反饋給系統,當用戶使用手持控制器與VR系統進行交互時,系統通過追蹤手持控制器的運動便可追蹤到用戶的手部運動。
HTC Vive系統使用激光發射器交替發射水平和垂直的同步激光束進行掃描,手持控制器表面分布的多個光敏傳感器測量激光到達的時間,解算出它們與激光發射器所形成的水平夾角和垂直夾角[25]。手持控制器融合多個光敏傳感器的角度數據和內置慣性測量單元的運動數據(包含位置和旋轉角度),解算出其在虛擬空間中的位置和旋轉角度。但慣性測量單元中隨機誤差較大,通常會干擾和覆蓋傳感器中有用的信號,當慣性測量單元用作運動控制系統中的反饋傳感器時,這些誤差會隨時間累積,導致運動數據顯著漂移。因此我們將從靜態和動態兩方面來評估手持控制器用于追蹤被試手部運動的可行性,衡量手持控制器長時間處于靜止狀態時的方位數據(位置和旋轉角度)隨時間的漂移程度,分析由慣性測量單元本身特性所帶來的隨機誤差及其對系統定位精度的影響,測量手持控制器平移、旋轉后所報告的方位與實際所處方位之間的偏差,以評估手持控制器是否能夠穩定移動到正確位置。
本文中,我們以HTC Vive系統測試ADHD為目標,探討HTC Vive系統采集手部運動數據的可行性。為此,我們設計了兩組實驗,以評估HTC Vive系統在虛擬空間中追蹤定位手持控制器位置和旋轉的準確性和穩定性。實驗一測量手持控制器靜置追蹤區域中心,以及在X、Y、Z軸方向上產生的位置和旋轉角度抖動誤差;采用艾倫方差方法對手持控制器的長時間靜態輸出數據進行分析,得到HTC Vive系統的定位隨機誤差。實驗二將手持控制器分別繞著X、Y、Z軸進行旋轉,沿著X、Y、Z軸進行平移,測量系統在各軸方向上的旋轉和平移誤差。
1 材料與方法
1.1 系統架構
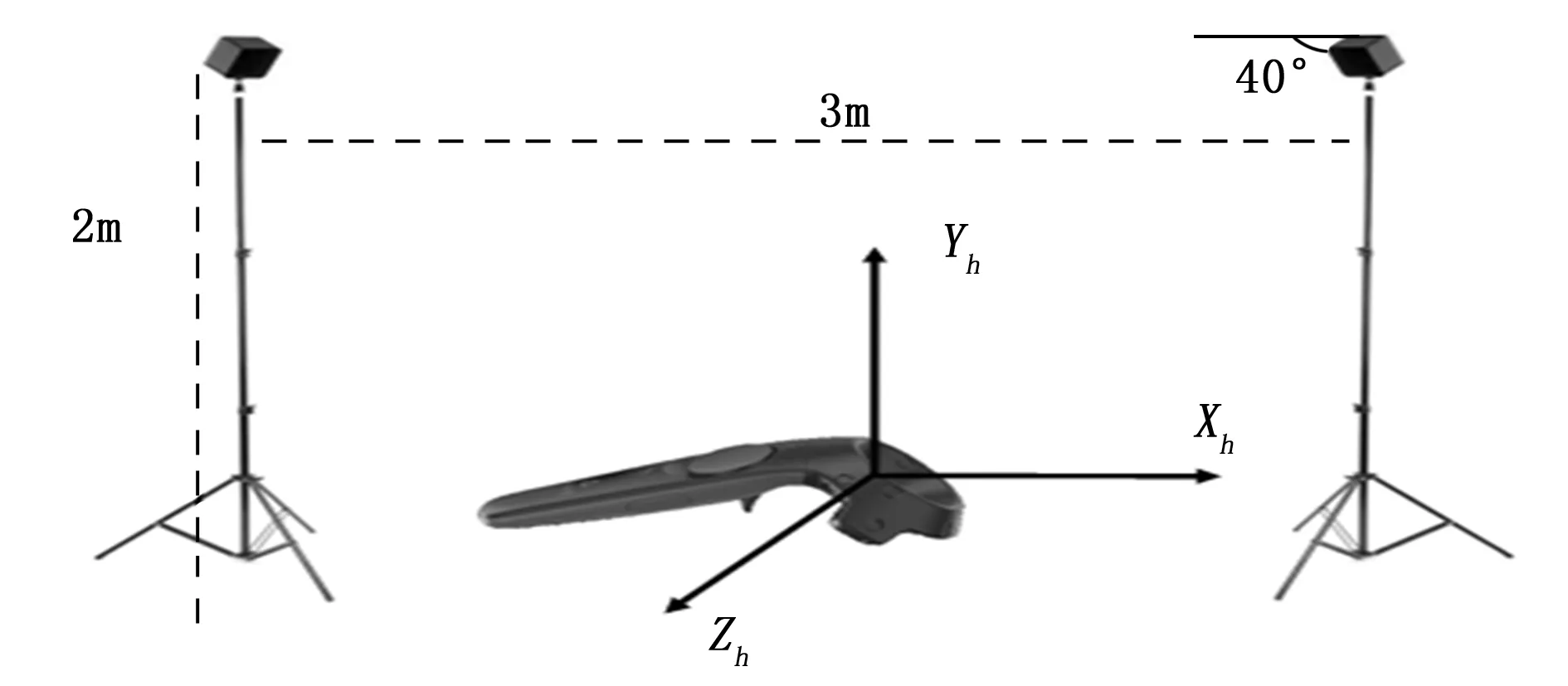
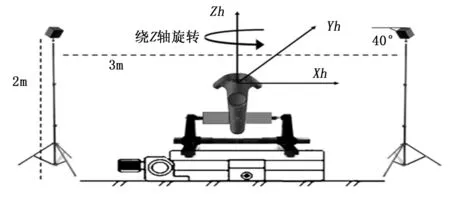
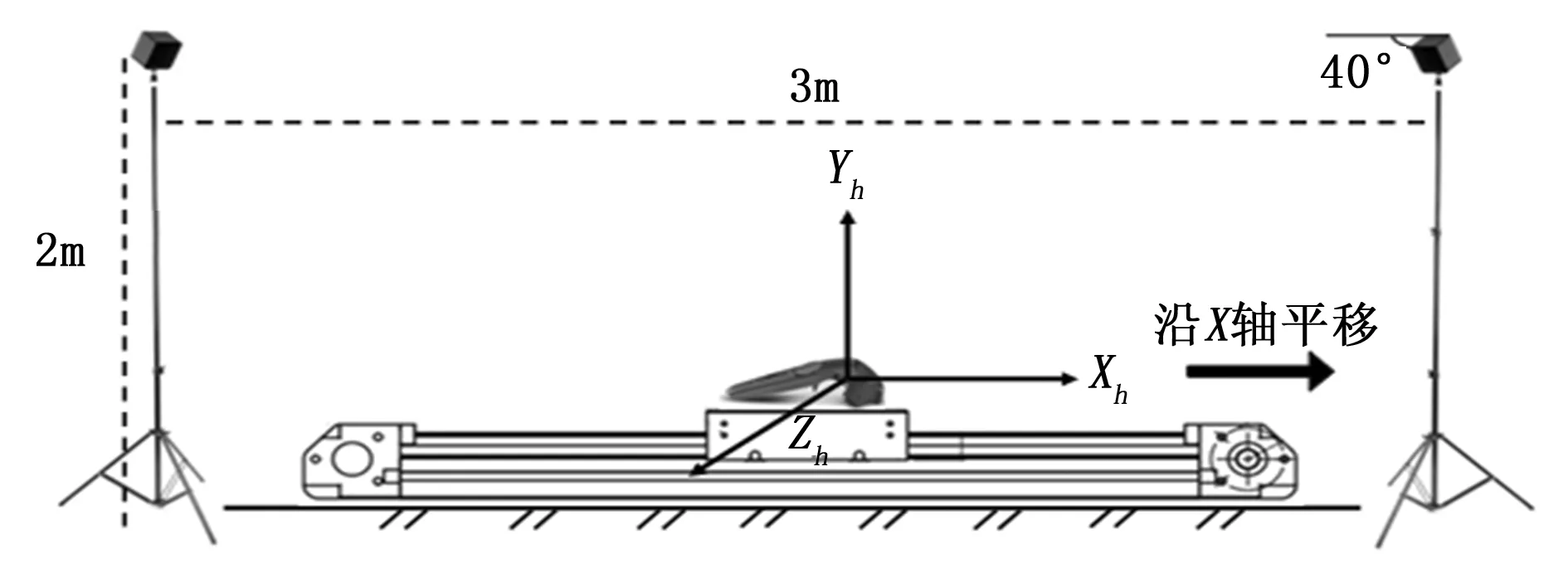
實驗場地的地板鋪上反射率低的地毯,排除實驗環境中反光物體對HTC Vive系統的干擾,以保證系統對手持控制器能夠正確跟蹤。將HTC Vive系統按照用戶手冊進行設置,兩個激光發射器分別固定在高2 m的三角支架上,并向下傾斜40°,發射器的LED鏡頭朝向實驗區域中心,兩個三角支架水平相距3米。將電源線連接到每個發射器后開始設置頻道,一個發射器設為頻道b,一個發射器設為頻道c。上位機啟動Steam VR應用程序,設定系統的追蹤區域。
兩個實驗分別從靜態和動態兩個方面來測量系統追蹤定位手持控制器的位置和旋轉精度。在實驗一中,采集手持控制器長時間靜置時的位置和旋轉角度數據,用于計算抖動誤差和進行艾倫方差分析;在實驗二中,采用高精度千分尺旋轉平臺實現手持控制器繞X、Y、Z軸旋轉,采用移動滑軌實現手持控制器沿X、Y、Z軸平移,采集多組手持控制器的旋轉角度和位置,用于計算系統的平移誤差和旋轉誤差。
1.2 抖動誤差計算方法

(1)
(2)
(3)


1.3 艾倫方差
艾倫方差最初是一種用于研究高精度振蕩器穩定性的方法[26],后來廣泛用于辨識慣性測量單元的隨機誤差[27]。艾倫方差方法從時域上對信號頻域穩定性進行分析,將隨機誤差作為時間序列來處理,不僅有助于識別觀測數據中存在的已知誤差項的來源,還有助于確定儀器自身固有的或其內部不明的誤差來源[28]。它能對誤差源以及對整個噪聲特性的影響程度進行細致的表征和識別。本文分別對手持控制器所反饋的位置和旋轉角度實測數據進行艾倫方差方法分析,得到艾倫標準差-平均時間雙對數曲線圖。
艾倫方差方法對手持控制器位置數據集S的具體處理過程如下:
1)劃分位置數據集S:
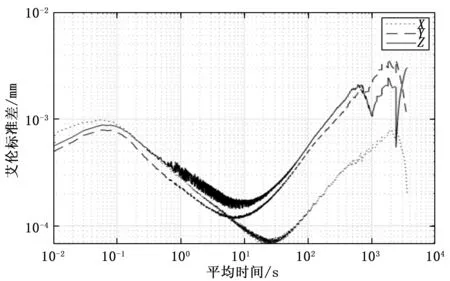
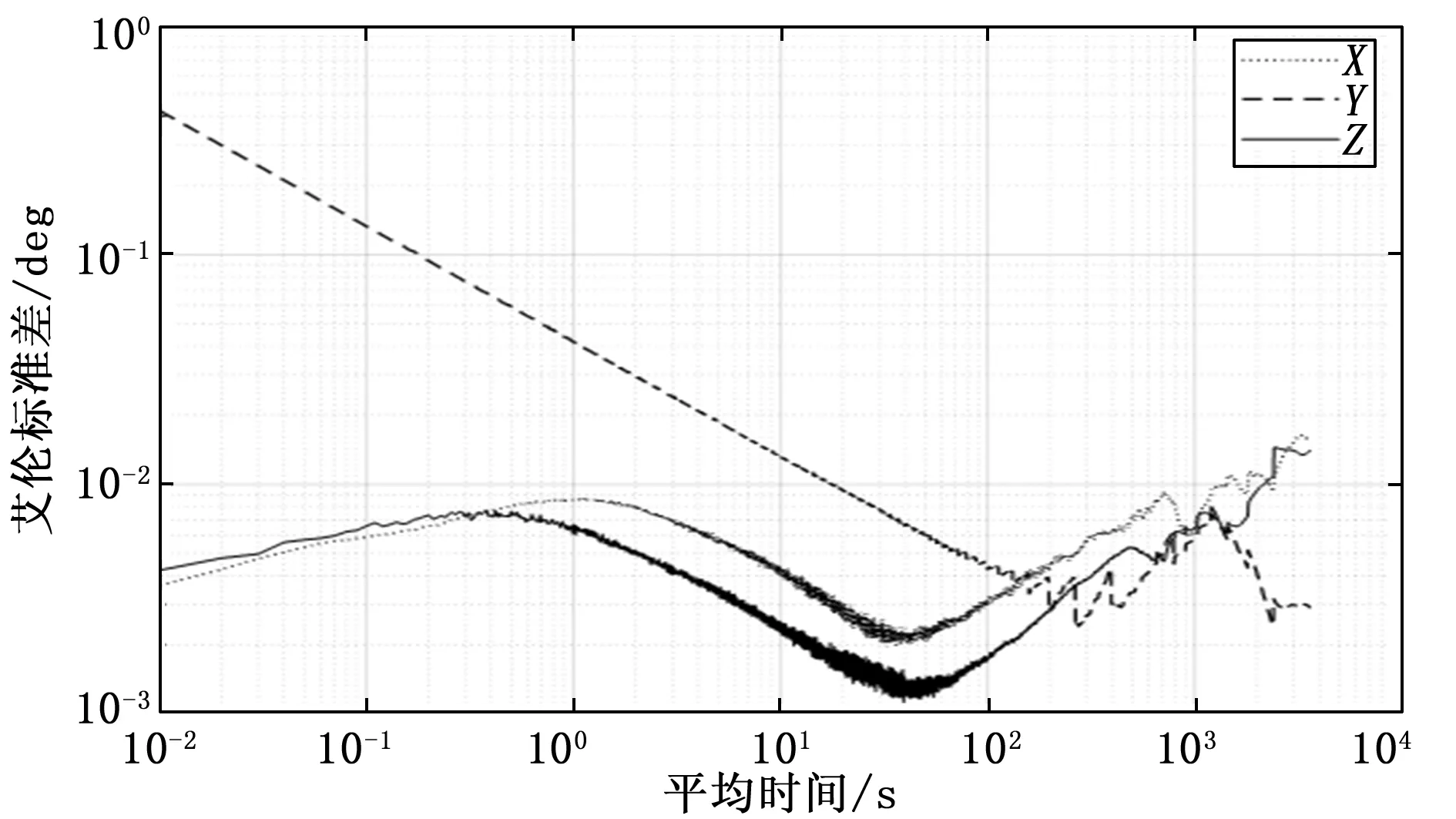
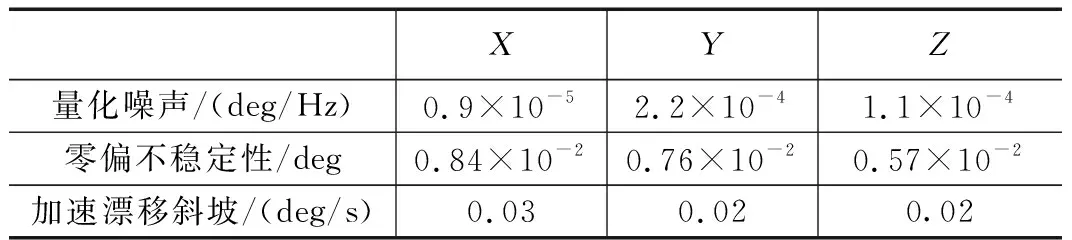
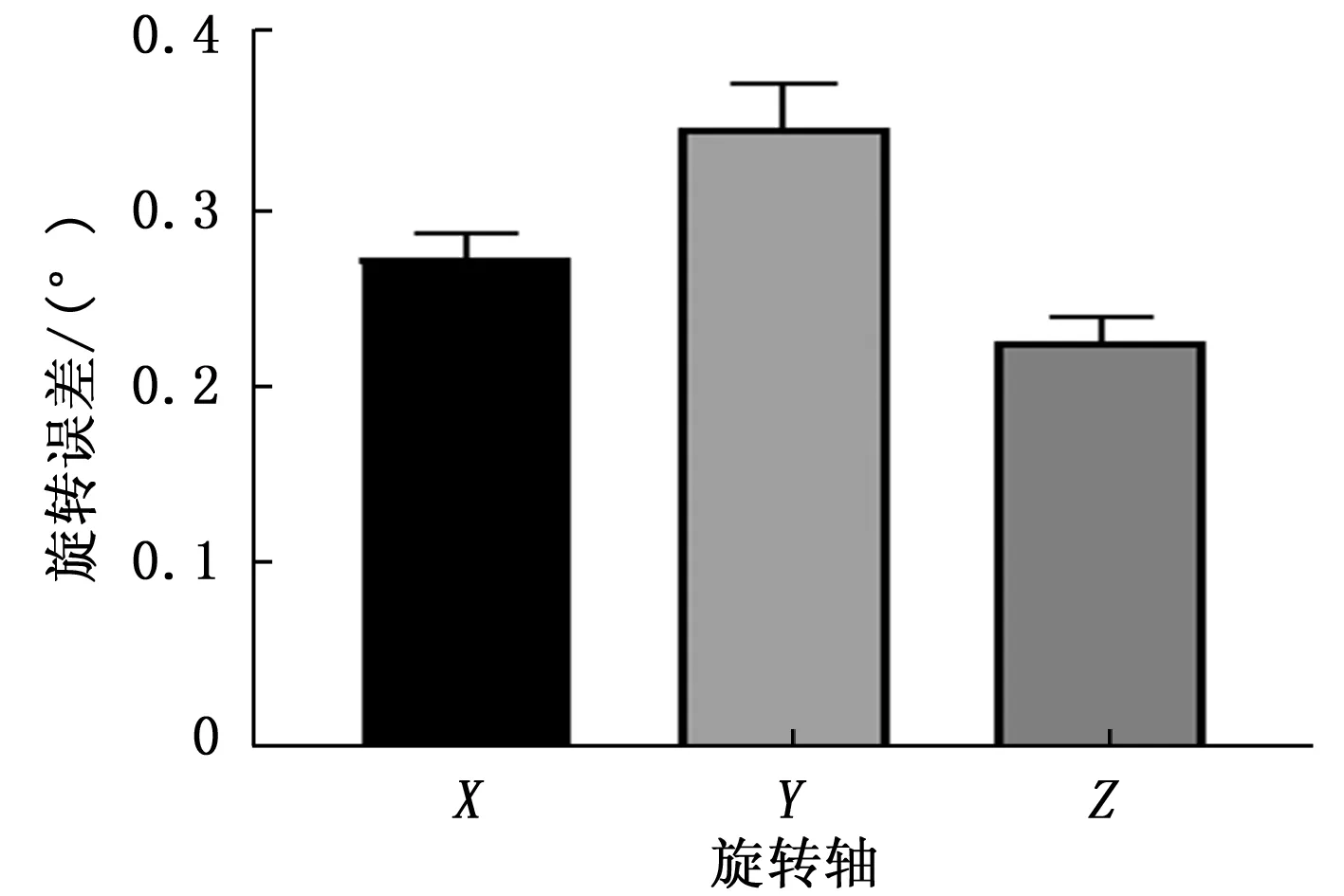
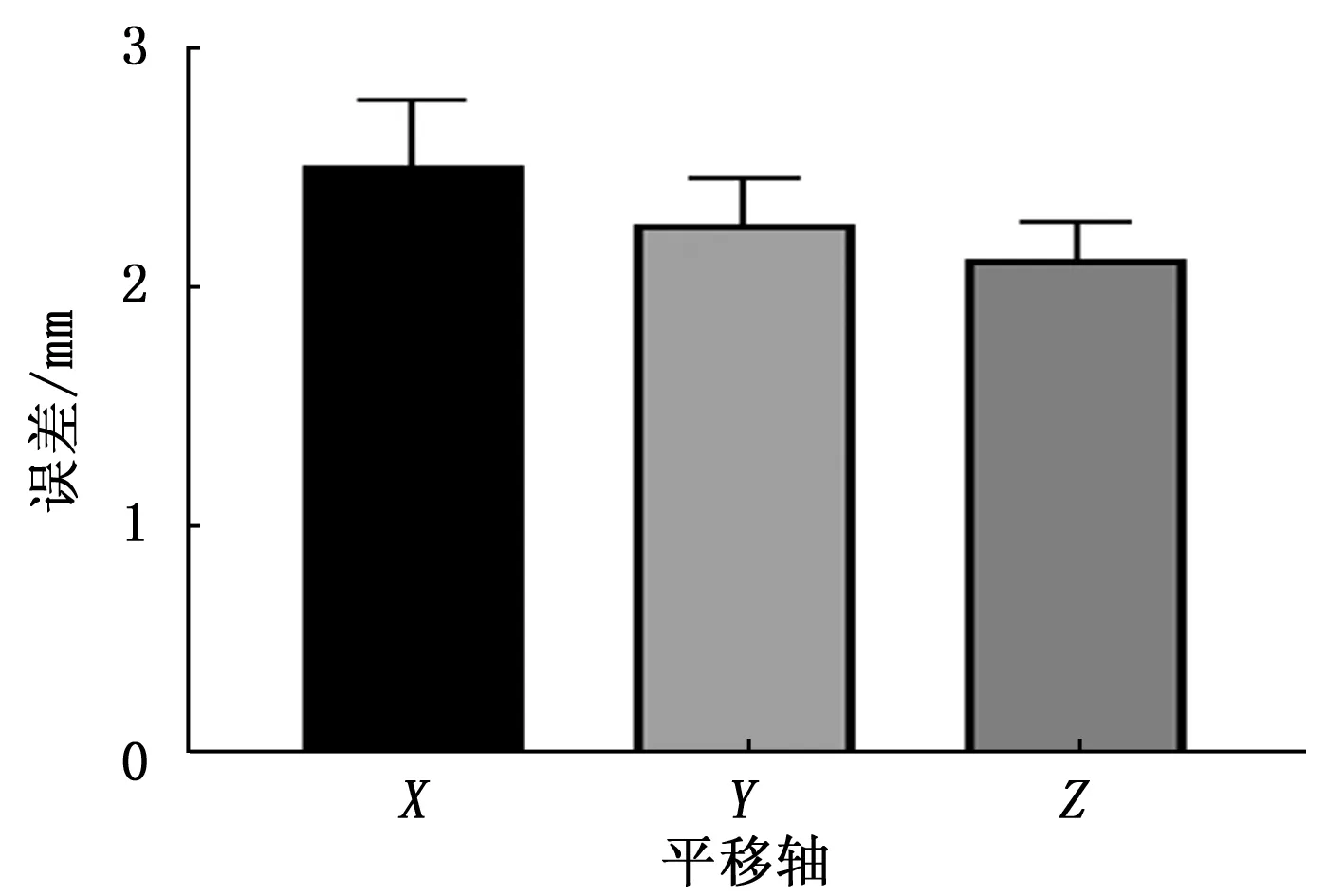
每連續n 2)計算子集Sk的平均值: (4) 3)定義艾倫方差: (5) 艾倫方差的平方根σ(n)通常稱為艾倫標準差。 4)繪制艾倫標準差隨平均時間變化的曲線: (6) 這里,τ=nt0。上式只有變量τ或n,可簡寫為: (7) 將艾倫標準差-平均時間雙對數曲線看作是由多段不同的斜率線段首尾連接而成[32],采用最小二乘法對每一段數據進行擬合,可求得每一段擬合函數的系數,再根據對應系數求解出各項誤差項系數為: (8) 表1 艾倫方差與常見噪聲系數對應關系 (9) (10) 將手持控制器靜止平放在HTC Vive系統的追蹤區域中心,見圖1,以100 Hz的速率持續采集手持控制器在虛擬空間中的位置和旋轉角度,持續2小時,數據采集程序在Unity虛擬引擎中運行。對所采集的數據進行分析,得到手持控制器在X、Y、Z軸方向上的位置抖動誤差分別為0.241 9 mm、0.238 8 mm、0.193 5 mm;旋轉角度抖動誤差為0.020 7°、0.042 2°、0.018 2°。 數學思想方法都是以一定的數學知識為基礎,反過來又促進數學知識的深化以及向能力的轉化.《普通高中數學課程標準》明確提出數學教學必須鼓勵學生積極參與數學活動,不僅是行為上的參與,更要有思維上的參與.筆者認為,在高中數學的核心概念教學中,要引導學生體會和領悟數學思想方法中蘊含的數學的本質內涵和的重要規律.要通過各種方式激活思維,深化思維,不斷地提高數學思維能力.這樣才能逐步提高學生發現問題、分析問題和解決問題的能力,不斷提高學生的思維品質和數學素養. 圖1 手持控制器靜置圖 分別對手持控制器的位置數據集S和旋轉角度數據集W采用艾倫方差方法分析,結果見圖2和圖3。 圖2 位置艾倫方差分析結果圖 圖3 旋轉角度艾倫方差分析結果圖 根據圖2和圖3中曲線的斜率可知HTC Vive系統的隨機誤差項主要包含了量化噪聲、零偏不穩定性、加速漂移斜坡。在平均時間較小的部分,艾倫標準差雙對數曲線斜率均接近,對應的誤差項主要為量化噪聲;在平均時間稍大的區域,曲線斜率均接近0,零偏不穩定性是主要的誤差項;在幾十到幾百秒的時間范圍內,曲線斜率均接近1,加速漂移斜坡為主要的誤差項。采用最小二乘法分別對位置和旋轉角度艾倫方差分析結果圖進行擬合,得到各項誤差系數見表2和表3。 表3 旋轉角度隨機噪聲系數分析結果 測量HTC Vive系統追蹤定位手持控制器旋轉的精度,利用夾具將手持控制器固定在高精度千分尺手動可調架滑臺旋轉平臺上,放置于追蹤區域的中心,見圖4。實驗員轉動旋轉平臺分別讓手持控制器繞X、Y、Z軸旋轉,每個軸順、逆時針方向各進行25次相同度數的旋轉,每進行一次旋轉后,停留10 s,采集旋轉角度數據,共采集150組樣本,每組樣本的采集時長為10 s。每次旋轉的角度范圍為5~50°。 圖4 手持控制器旋轉示意圖 測量HTC Vive系統追蹤定位手持控制器平移的精度,將手持控制器固定在移動滑軌上,置于追蹤區域中心,如圖5所示,實驗員移動滑軌使得手持控制器分別沿著X、Y、Z軸方向各進行50次平移,每次平移后停留10 s,采集手持控制器的位置數據,共采集150組樣本。每次平移的范圍為5~50 cm。 圖5 手持控制器平移示意圖 最終計算得到手持控制器繞X、Y、Z軸旋轉的旋轉誤差為0.317°、 0.285°、0.305°,如圖6所示,手持控制器沿著X、Y、Z軸平移的平移誤差為2.509 mm、 2.247 mm、2.096 mm,見圖7。 圖6 旋轉誤差 圖7 平移誤差 實驗一的結果表明手持控制器靜置時的位置抖動誤差小于0.25 mm,旋轉抖動誤差小于0.05°,可見手持控制器長時間靜置時的位置和旋轉角度漂移量均比較小,HTC Vive系統的追蹤精度較穩定。采用艾倫方差方法分析手持控制器靜置時的位置和旋轉角度實測數據,發現其主要包含了量化噪聲、零偏不穩定性、加速漂移斜坡這三種誤差項,誤差項系數分別對應于艾倫標準差-平均時間雙對數曲線圖中的各平均時間段。 本文分別從靜態和動態兩個方面來評估HTC Vive系統追蹤定位手持控制器位置和旋轉角度的準確性和穩定性,量化系統定位的隨機誤差。最終得出系統在X、Y、Z軸的位置抖動誤差小于0.25 mm,旋轉抖動誤差小于0.05°;平移誤差小于3 mm,旋轉誤差小于0.35°。實驗結果表明誤差都在允許范圍之內,系統可用于采集人體的手部運動數據,為進一步量化被試的手部運動,研究ADHD患者與正常兒童在虛擬現實環境中手部交互的運動差異奠定基礎,從而輔助醫生有效地區分ADHD患者與正常兒童。
1.4 旋轉和平移誤差計算方法


2 實驗
2.1 實驗一
2.2 實驗二
2.3 實驗結果分析
3 結束語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45