礦用掘進機電控系統設計及應用研究
2021-05-07 13:37:24王列,殷華
能源與環保 2021年4期
王 列,殷 華
(國家能源集團 寧夏煤業公司靈新煤礦,寧夏 靈武 751400)
掘進機是用于煤礦巷道掘進工作的重要設備。礦用掘進機的良好作業是提高煤礦開采效率[1]及作業安全的關鍵。電氣控制系統是掘進機中的核心系統,為提高掘進機工作效率,加強智能礦井建設,電氣控制系統綜合性能的升級研究已成為當下掘進機設備的重要研究方向[2-3]。在現有準備的基礎上,通過電氣控制系統升級改造來滿足現有生產的需求,已成為一種經濟、快捷、高效的技術路線[4-5]。EBZ260型懸臂式掘進機是由一款常用的懸臂式掘進機,屬重型掘進機,具有截割穩定性好,截割能力強,承載能力大,安全系數高等特點,其電氣系統采用模塊化設計,預留電源和各種通信接口,便于實現各種控制、監測、故障診斷等功能升級[6]。
在EBZ260型懸臂式掘進機電控制系統的基礎上,重新設計其電氣控制系統,并安裝到掘進設備進行了應用測試。結果表明,該系統控制性能優良,能滿足掘進機的使用需求,提高了作業效率、增強了作業穩定性。
1 EBZ260型懸臂式掘進機概況
1.1 EBZ260型懸臂式掘進機硬件概況
EBZ260型懸臂式掘進機外觀如圖1所示。

圖1 EBZ260 掘進機外觀Fig.1 Appearance of EBZ260 roadheader
其主要由掘進部分、行走部分、控制系統、支撐部分、液壓部分、水路部分等組成,其主要功能參數見表1。該掘進機可截割單向抗壓強度≤80 MPa的煤巖,適用巷道斷面面積8~20 m2、最大可行走坡度為±16°,同時,它采用模塊化設計,便于拆裝和運輸,是當前主流的掘進設備。掘進部分是該設備主要作業部分,主要由電機、減速器、截割臂、截割頭、固定架等組成。而控制系統則由電控箱、操作箱、按鈕控制箱、驅動電機、傳感器等組成,其中,電控箱采用了隔爆型設計,由鋼結構通過焊接方式組成,其中包含各類元器件及控制部件,控制著整套系統的運行。另外,操作箱面板上配備了多個指示燈、開關按鈕等,實現了電壓等信號及命令的可實時顯示。
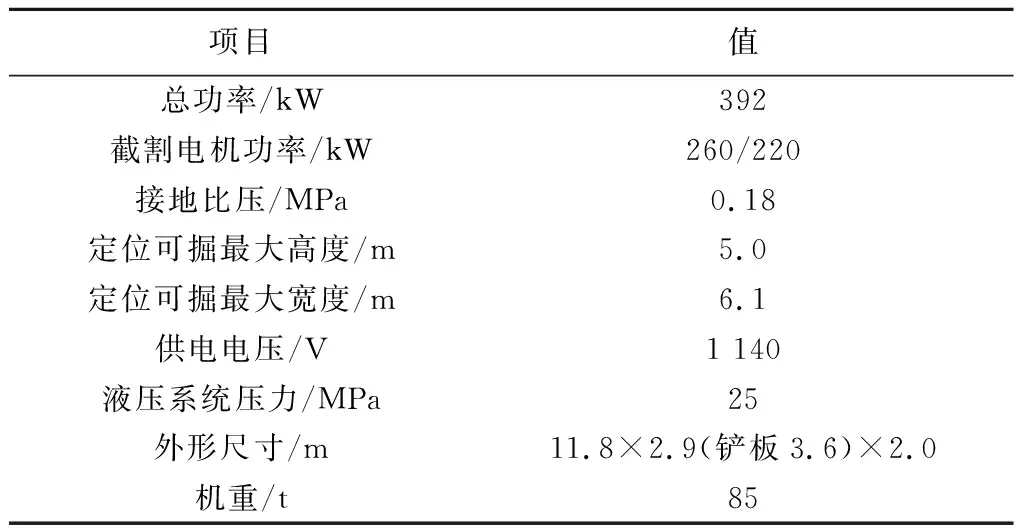
表1 EBZ260型懸臂式掘進機重要參數Tab.1 Important parameters of EBZ260 boom roadheader
1.2 EBZ260型懸臂式掘進機控制系統狀態分析
EBZ260掘進機雖然實現了電氣控制,但在實際運用過程中,自動化程度較低,電氣系統控制仍存在一些問題。隨著當前自動化控制技術的不斷發展,EBZ260掘進機已逐步向自動化及智能化方向進行升級改進,但在實際使用過程中仍存在自動化程度低、控制精度較差等問題。①當前掘進機控制系統雖基本實現了對設備運行中的高溫、油位過低等故障異常的報警提示,但存在報警響應速度較慢且無法實現故障信息實時傳輸、遠程監控及顯示的控制操作;②當前控制系統在通信接口方面設計得相對較少,通信傳輸速度較慢,較難在現有控制系統基礎上對系統進行升級擴展,也無法將更加先進的控制命令集成到當前系統中;③控制系統較難實現對設備過壓保護、過流保護、轉速過高保護等方面有效保護,如設備出現此問題,無法通過控制系統對故障進行實時排出及執行相關的控制保護功能;④控制系統無法將設備出現的故障類型及故障發生位置通過遠程監控平臺進行遠程顯示及控制,人員在故障排除過程中將耗費大量時間及成本,且由于井下環境的惡劣性,增加了井下作業的危險性。因此,將當前更加成熟的控制技術應用到掘進機的自動化控制中,實現設備更加智能化的遠程操作控制已成為當前提高設備作業效率及安全性的重要任務。
2 電氣控制系統的設計
2.1 電控系統的控制要求
根據掘進機工作環境及狀態,結合 MT/T238.3 標準,梳理出以下電控系統控制要求:①總線通信設備能夠快速的向控制器發送實時數據和接收控制信號。②能夠對機電控制系統進行檢測,包括系統電壓檢測、油溫油位檢測、操作箱狀態檢測、總線模塊狀態檢測、絕緣檢測、瓦斯檢測。③在檢測到故障后,系統能故障的類型做出不同的響應。故障處理完成后,點擊復位清除故障報警。④對電機的狀態進行檢測,同時記錄電機的運行情況進。
2.2 電氣控制系統結構總體框架
結合現有EBZ260型掘進機控制系統使用中存在的各類故障,在現有控制系統應用基礎上,對該控制系統進行了改進研究。該系統以高性能控制器為核心,能夠實現傳感器檢測、數據處理、運行狀態判斷、故障處理等。能夠接收各種操作指令,在人機界面顯示相關信息。控制器的輸入信號主要包括操作箱按鈕的操作信號、各種電流電壓信號、溫度信號以及泄漏信號、油位、氣體傳感器信號等。輸出信號包括電機啟停、電機漏電、故障報警、設備啟停等信號。控制系統中的處理器在接收到相關信號后,對數據進行分析、運算及判斷,在向顯示終端發出命令同時,向掘進機中的執行機構進行控制命令輸出,以實現對掘進機的高速切削啟動/停止、電機保護、電機啟停、故障及語音報警等。
結合控制要求和現有電氣控制結構,改進后的電氣控制系統結構組成框架如圖2所示。整體采用24V電源隔爆兼本安型電控箱,以BH-9型4AD模塊為檢測集成器實現保護功能。為簡化現有控制系統的電路,將電控模塊分為數據處理模塊、信號執行模塊、信號轉換模塊、數據采集模塊4個模塊,實現模塊化。另外,將原有按鍵式顯示屏改為觸屏式的顯示屏;增加了對掘進機漏電情況、井下瓦斯濃度情況等相關參數的實時顯示;為方便后期的檢查和維修,將多種電壓平臺統一改為220 V電壓。
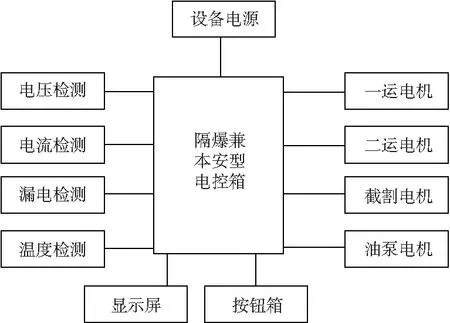
圖2 新型電氣控制系統結構組成框架Fig.2 Structure frame of new electrical control system
3 控制系統關鍵分系統設計
3.1 控制器的選擇
掘進機主要在煤礦巷道等空氣濕度大,浮游雜質含量高,充滿腐蝕性氣體的環境中工作[7]。故選用了市場上成熟的 DCF-1型控制器。此 DCF-1型控制器是專業用于工程車輛的控制單元,以高性能的微處理器為核心,擁有豐富的數據采集、控制和通信接口,基本不需要擴展輸入輸出模塊或通信模塊就能實現系統的主要功能,可簡化掘進機電控系統的組織結構,采用太空鋁外殼封裝,具有防塵、防水、防電磁干擾、防震等特性,已經被多種工程機械采用。結合掘進機現場工作環境和系統要求,選用 DCF-1控制器(圖 3)。DCF-1型控制器采用 32 位微處理器核心,由CPU 端和 I/O 端2部分構成,具有多個通信接口,可實現豐富的數據采集,在不擴展外圍接口的情況下就能實現電控系統的基本搭建。此外,該控制器還擁有掉電存儲區,保證了斷電后數據的保存及讀取。

圖3 DCF-1控制器Fig.3 DCF-1 controller
3.2 信號采集系統設計
掘進機在運行過程中,需要實時采集較多種類的運行信號,如電機功率及轉速、設備溫度等。針對不同參數,信號采集需要分別設計。通過CAN 總線實現信號采集及驅動輸出模塊與控制器之間的連接,其功能架構如圖4所示。掘進機工作溫度采用AT-1A熱電阻溫度傳感器進行采集,檢測精度達到0.1 ℃,并能夠實時傳輸至保護模塊BH9中;設備的工作電壓采用CSP2-1500V型變壓器針進行監測,它能將外界電壓快速轉為設備運行所需的5、12 V等電壓值,實現了對電壓平臺的動態檢測。為采集離線狀態電機負載的絕緣電阻,采用絕緣監視儀 IR420-D6并在檢測回路分別串入了2組檢測繼電器節點和接觸器常閉節點,從硬件和軟件2方面入手保證絕緣監視儀的離線使用,從而確保電機運行時檢測回路能可靠的斷開。由此完成了對掘進機控制系統中信號采集部分的設計。

圖4 主功能架構Fig.4 Main function architecture
3.3 CAN總線系統設計
CAN 總線優勢明顯,如傳輸速率高,最高可達 1 Mbit/s;采用非破壞式總線仲裁,避免了多節點數據的沖突;檢錯機制和錯誤處理機制有效可靠;總線利用率極高[8-9]。因此,本設計采用 CANOpen協議,既避免多數據節點沖突,實現可靠有效的總線控制,也很方便后續對其他廠家不同設備的配置。結合現有礦用掘進機電控系統,此次設計的CANOpen總線系統由括操作箱和電控箱組成以雙絞屏蔽線連接[10],通信架構圖如圖5所示。操作箱內有電阻、遠程DI、顯示屏和光耦隔離模塊,電控箱內部有分布式I/O、控制器、24 V電源模塊、光耦隔離模塊等,其中光耦隔離中繼模塊用于保護所有設備的通信口。
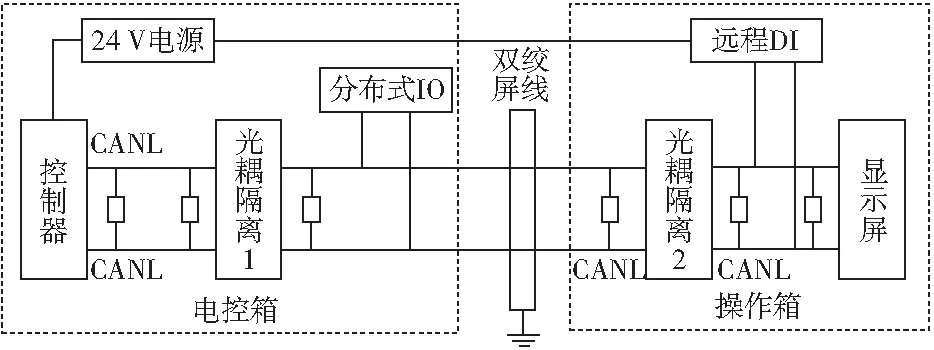
圖5 CANOpen 通信架構Fig.5 CANOpen communication architecture
3.4 電氣控制箱設計
電氣控制箱安裝在掘進機機身后方,電控箱去蓋板后正視圖如圖6所示。

圖6 電控箱去蓋板后正視圖Fig.6 Front view of electric control box after removing cover plate
其中安裝有控制元件、電路板、各類動作元件等部件。整個箱體由2個腔體組成,按照隔爆型和安全型原則,上下獨立,采用防爆接線端子連接。位于上方的接線腔內設有2個接線端子,分別為控制線、電纜接線端子,外部連有引入裝置。下方為主腔,主腔底部裝有變壓器、控制電路熔斷器、繼電器、保護裝置、接線端子、絕緣監測模塊、DC電源、電流互感器和控制器,主室后壁裝有真空接觸器和耦合儀表。主腔體外殼上設有隔離開關手柄和接地螺栓。在門板上增加了機械聯鎖,可實現開關不在停止位置時禁止開門的功能。主電路板采用防脫螺栓固定結構設計,門板增加開關電源、FX2N-64MR可編程控制器、BH9集成信號轉換裝置等設備。通過這種改進設計,電氣控制箱的布局更加合理,部件和連接器分離良好,可以有效提高箱內部件在使用過程中的穩定性和安全性。
3.5 電氣系統的軟件設計
3.5.1 軟件主程序設計
當今,數字出版物越來越受人關注和青睞,數字閱率整體上升迅猛,各家出版單位競相朝這個方向發展,究其原因是它的優勢所趨。數字出版物最突出的優點是便捷、環保,這一特點非常符合現在社會的發展理念。數字出版物給讀者帶來的便捷是有目共睹的,相對于紙質圖書,其成本低、存儲量大、攜帶方便,深受廣大讀者的喜愛。對出版者而言,電子圖書可以實現零庫存,減少了人力、物力、財力,從而節約了成本。
編程軟件采用PROSYD 1131。PROSYD 1131是INTER CONTROL公司基于CODESYS開發的編程軟件,可用于INTER CONTROL digsy控制器和顯示器。和CODESYS一樣,PROSYD 1131符合IEC國際標準,支持主流編程語言。其主界面如圖7所示。

圖7 PROSYD 1131 主界面Fig.7 Main interface of PROSYD 1131
它具有完整而豐富的功能指令,提供了開發和設計所需的位邏輯、整數、浮點數運算函數、比較函數、賦值函數、移位函數、循環函數、數據類型轉換函數、定時器函數、計數器函數、PID函數等豐富的功能指令集。此外,用戶還可以根據自己的需要編寫函數塊、子例程、庫文件等,在計算機上進行離線仿真,不需要使用硬件進行調試,從而大大減少了開發調試時間。最后,它還具有在線診斷和監控功能,允許開發人員在仿真或連接的硬件在線運行時在線修改數據,并以圖形或文本的形式顯示程序的運行和數據的變化。主程序分為4個部分,包括初始化程序、系統狀態管理程序、電機管理程序和運行狀態判斷處理程序。主程序流程如圖8所示。

圖8 主程序流程Fig.8 Flow chart of main program
3.5.2 初始化子程序設計
初始化子程序主要包括CANOpen設備的管理,發送PDO和接收PDO的映射管理,系統各種參數的讀取,其流程如圖9所示。系統狀態管理過程監控和管理各系統的運行狀態,包括報警控制器的輸入和輸出,通信模塊的檢測網站系統的輸入電壓的檢測,泄漏檢測的低電壓電路、外圍氣體傳感器的輸入檢測等。電機管理子程序是采集并計算電機的電流和溫度,然后管理電機的狀態,計算油泵和切割電機的運行時間。行狀態判斷處理程序根據系統的運行狀態、電機的運行狀態和用戶的按鈕控制綜合判斷系統的運行狀態,然后根據運行狀態切換顯示屏幕。
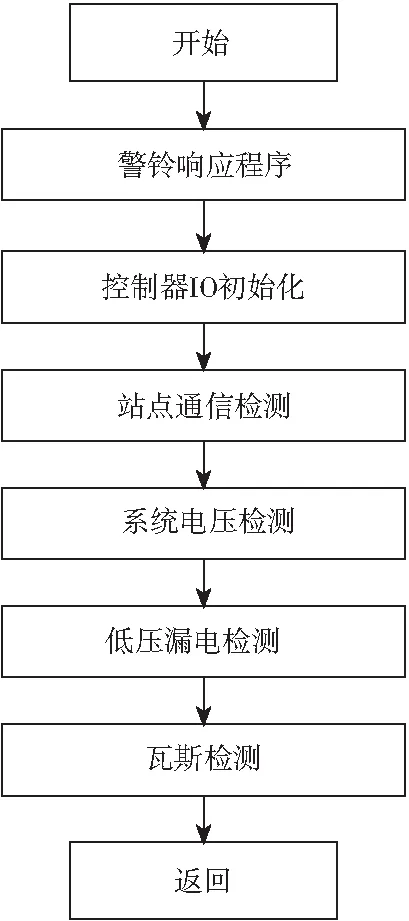
圖9 初始化程序流程Fig.9 Flow chart of initialization procedure
4 實際使用效果分析
為進一步掌握系統的運行效果,將改進后的EBZ260掘進機電氣控制系統安裝在掘進機設備中,開展了為期1個月的現場應用測試。
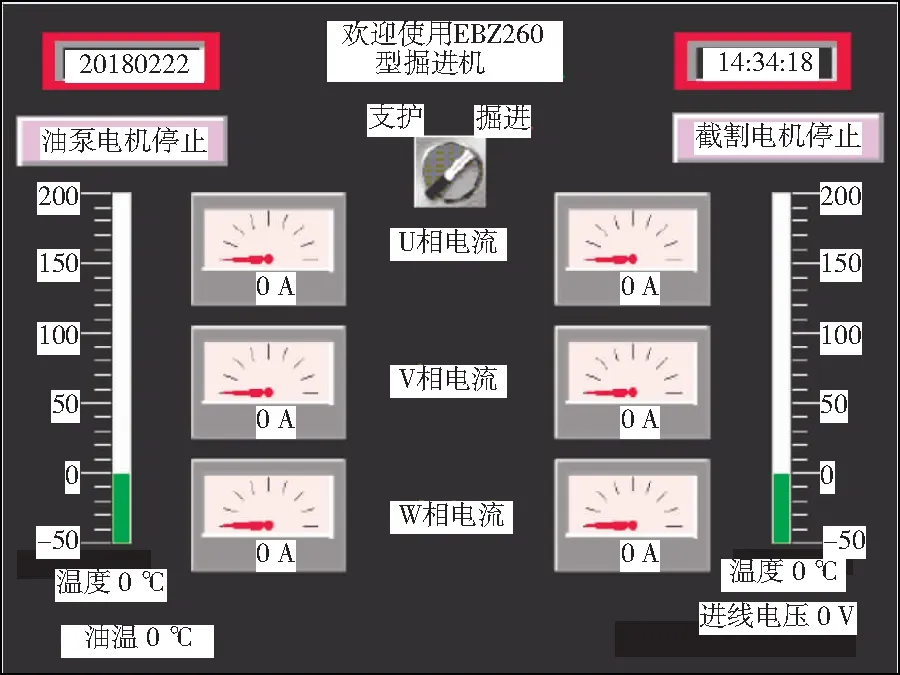
圖10 EBZ260掘進機設備運行界面Fig.10 Operation interface of EBZ260 roadheader
(2)當故障發生時,系統會自動切換到故障界面。故障系統界畫主要顯示故障位置及其相應的處理辦法。此外還專門設計了針對電機的故障顯示界面,當電機系統出現故障時會跳轉到該界面。該界面顯示了油泵電機、高速電機結構、低速電機、二運電機以及噴霧電機5個電機的具體情況,并為每個電機設置了6個節點,當任意一個節點出現問題時,該節點的燈就會亮起,提示出現異常。
(3)系統還支持歷史數據查詢,用戶可通過按鍵進入到歷史故障界面。在歷史故障界面,最多可以查詢到最近40條歷史故障信息。在故障歷史界面,可通過上下頁進行翻頁,正在發生的故障顯示為紅色,已經解除的歷史故障顯示為綠色。此外電機總運行時間也可查詢。
(4)該系統支持對掘進機運行參數進行快速保存,并且支持將數據導出。用戶可根據自己的實際需求,將導出數據,繪制曲線,方便后續觀察掘進機的工作狀態以及進一步研究。
(5)該系統得到了現場工作人員的認可,一致認為可在多種掘進機上推廣實驗該系統。
5 結語
在當前常用的EBZ260型掘進機上進行電氣控制設計研究,對掘進機的電控系統進行了系統的研究和整理。總結出掘進機電控系統的基本控制要求,在基本控制要求的EBZ260掘進機系統現有架構上,重設了整體架構。將硬件系統進行了設計,根據工作環境和性能要求選擇了DCF-1作為核心IC控制器。采用CANOpen總線使整個電控系統模塊化同時更加可靠穩定,采用IEC標準語言設計了機電系統的軟件,并經過整理設計出良好的人機交互界面。設計出了一套自動化程度高,可靠穩定的電氣控制技術。將該技術運用于實際,掘進作業中診斷各項功能運行正常,自動化診斷能力顯著提升,更好地實現了對掘進機運行過程中的診斷監測,提升了掘進機的作業效率以及作業穩定性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
通信電源技術(2018年5期)2018-08-23 01:16:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
