剛軟結合可穿戴手部康復裝置設計
2021-05-07 02:14:24王明昊水生財
中國機械工程 2021年8期
劉 冬 王明昊 畢 聰 水生財 叢 明 杜 宇
1.大連理工大學機械工程學院,大連,1160242.大連大華中天科技有限公司,大連,116023
0 引言
近年來,由中風等疾病引起的手部功能喪失的患者人數逐年上升。對于這類患者,除一般藥物治療外,還需輔以抓、握和捏等手部運動功能的恢復治療。手部康復裝置就是對手部功能障礙患者進行康復治療和日常生活輔助的設備[1]。國內外研究人員對其結構和控制等方面進行了研究[2],相繼提出了基于連桿傳動[3-5]、繩索傳動[6]等結構的外骨骼手部康復裝置,但這類剛性手部可穿戴康復裝置柔性不足、與手指貼合性較差,容易造成患者手指發生側彎或者扭轉,造成二次傷害。
近年來,軟體手部康復裝置具有貼合性好、自由度高、安全性好等優點[7]受到國內外研究人員廣泛關注。POLYGERINOS等[8]設計了一種可穿戴式手部軟體康復裝置,該裝置執行器部分由硅膠與限制層材料粘合制成,采用氣動驅動,工作時頂部超彈性材料制成的空腔結構在充氣后膨脹,而底部的限制層約束底部膨脹,導致整個執行裝置產生彎曲的效果。ZHAO等[9]研究了一種氣動軟體手部康復裝置,該裝置由彈性材料制成,每個手指上都有一系列相互連接的氣室,在每個手指的掌側都有一個相對不能伸展的尼龍布,在流體加壓驅動時,執行器引起抓握運動,實現康復治療。IN等[10]設計了一種帶有柔軟的肌腱傳送系統的可穿戴的手部裝置,護套裝有執行機構導線,幫助將導線張力傳遞到手套,當屈肌腱被拉動時,背帶推動指骨的背部和頂端,實現手部的康復訓練。YAP等[11]設計了一種可穿戴式手部軟體康復機器人手套MR-Glove,該手套由軟體氣動執行器與手套組成,軟體氣動執行器由硅膠彈性體制成,氣泵將壓力氣體通過管路通入氣動軟體執行器,軟體執行器產生彎曲運動帶動手指進行康復訓練。趙芳[1]設計了一套軟體外骨骼式機器人系統,軟體執行器內部結構為中空,采用尼龍作為限制層填充物內嵌在硅膠內。管瑞陽等[12]設計了一種穿戴式康復機器人手指的軟體致動器,該軟體致動器由具集成通道的彈性材料制成,內部為密集分布的三角形非充氣腔室和菱形充氣腔室軟體結構。雖然軟體手部康復裝置具有柔性好、貼合性好、自由度高等諸多優點,但也具有驅動力小、復雜軟體裝置不易制作等缺點。
本文綜合剛性裝置與軟體裝置的優點,采用軟體關節與剛性指節結合的形式,設計了一種剛軟結合的可穿戴手部康復裝置。該康復裝置不僅具有比純柔性裝置更強的傳力性能和手指的貼合性,而且具有比剛性裝置更好的柔性和較高的安全性,且結構簡單、成本低。
1 剛軟結合手部康復裝置設計
1.1 人手生物結構分析
為了實現對手功能喪失患者手部的康復功能,需要研究手部的尺寸參數和關節運動參數,以確定康復裝置各關節、指節的尺寸。手部運動的實現是由肌肉屈伸帶動手指骨頭運動,改變指骨與指骨之間的相對位置來實現的[13]。對于人手來說,一般可以完成屈伸運動和開閉運動。屈伸運動就是人在握拳與展開的過程中,手指關節所完成的彎曲與展開運動。開閉運動就是手指與手掌在同一水平面上,掌指關節所完成的擺動運動。本文主要針對手指屈伸時各關節的活動范圍開展可穿戴康復裝置的設計。
所設計的手部康復裝置結構要結合人手關節、指節等參數。通過查閱正常成人手指參數模型庫[14-15],獲得手部各指頭關節的自由度、運動方式及活動范圍,如表1所示。除此之外,還須考慮手指各指節長度參數。成人手部各手指指骨尺寸范圍[16]如表2所示。
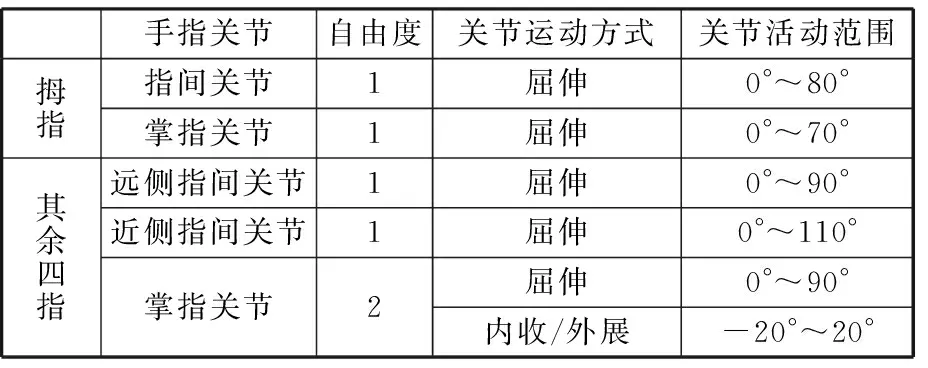
表1 正常成人手指關節活動范圍[14-15]Tab.1 Joint ranges of normal adult fingers[14-15]
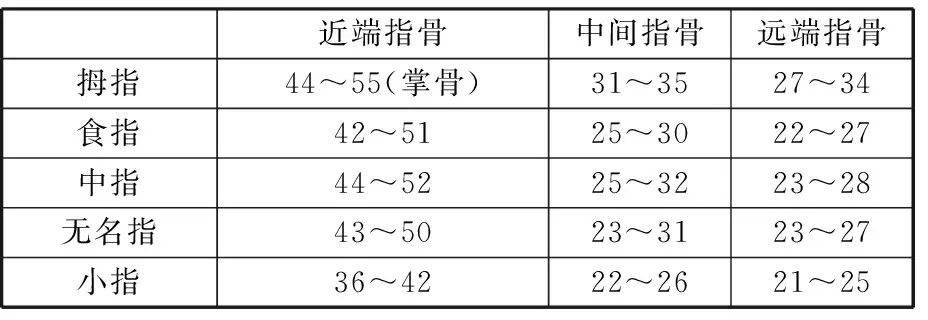
表2 成人各手指指骨尺寸范圍[16]Tab.2 Phalange size ranges of adult fingers[16] mm
1.2 軟體關節與剛性指節結構設計
氣動軟體手指執行器是軟體康復裝置的主要部件,其結構設計的優劣直接影響裝置的性能。通過對人手的生物結構進行分析,設計軟體手指執行器各指節、關節的尺寸,如表3所示。
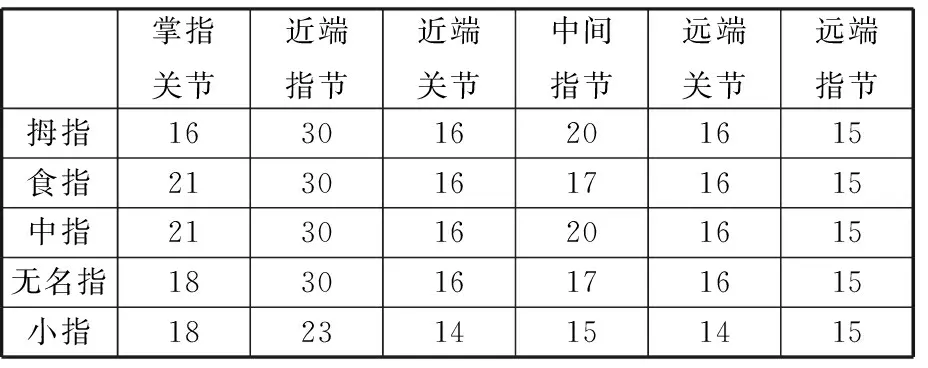
表3 軟體執行器各指節和關節長度
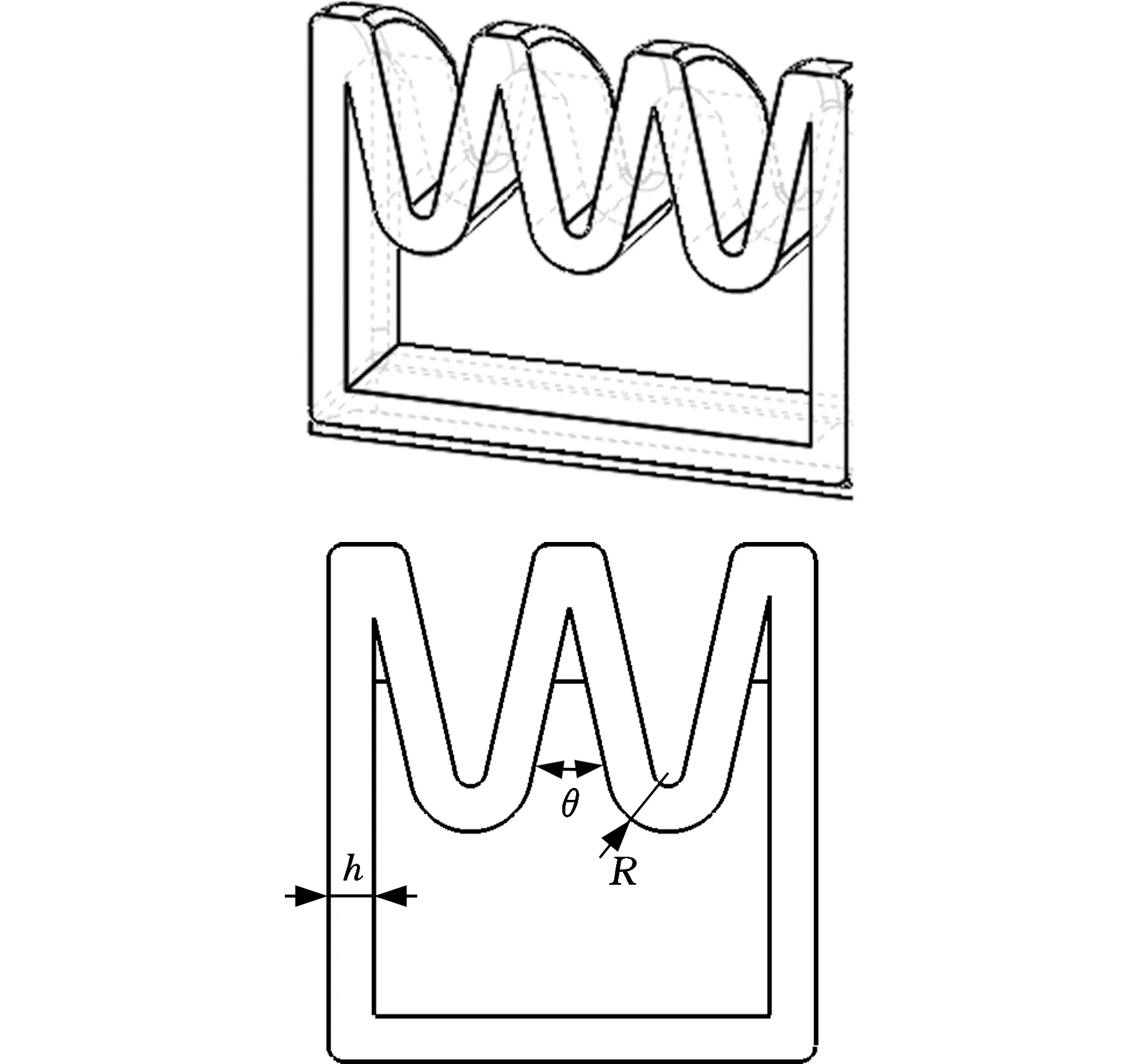
圖1 軟體關節結構模型Fig.1 Soft joint structure model
根據表3參數,設計了氣動軟體手指執行器軟體關節結構模型,如圖1所示。為了解決PneuNets結構局部應力過大的缺點,將氣動軟體關節由多個分割式氣室改為整體氣室,將原本的矩形結構優化為波浪形結構,以增加變形量、減小應力;將原始的矩形斷面優化為圓弧形狀,以減小應力、增加裝置的安全性能。通過改變關節外層壁厚h和單個波浪形氣室結構的角度θ進行有限元仿真實驗,確定彎曲性能最佳的結構參數,實驗設計和結果如表4所示。通過實驗可得,外層厚度h越大,彎曲角度越小,但h=1 mm時徑向膨脹過大,所以本文選擇h=1.5 mm。θ對彎曲性能的影響不大,根據結構特性選擇θ=25°,并設置波浪結構圓弧半徑R=2 mm,便于結構設計,且手指整體彎曲角度可以滿足手部康復要求。
為了滿足管路與軟體關節連接的氣密性要求,采用“硬+軟+硬”的方案結構。為了減小裝置的質量,同時將氣路布置在其中間以減小裝置所占空間,剛性指節由上下兩個殼體組成并采用中空結構設計,如圖2所示。為了減少零件的數量,使結構簡單輕便,剛性指節的上下殼體的連接采用卡扣結構,軟體關節與剛性指節接口的設計結構如圖3所示。
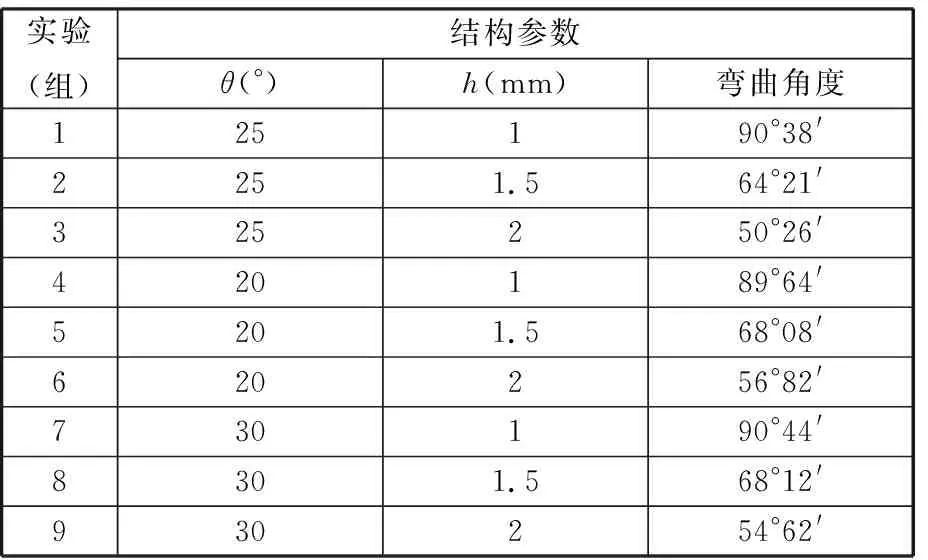
表4 結構優化實驗設計和結果Tab.4 Structural optimization experiment designand results
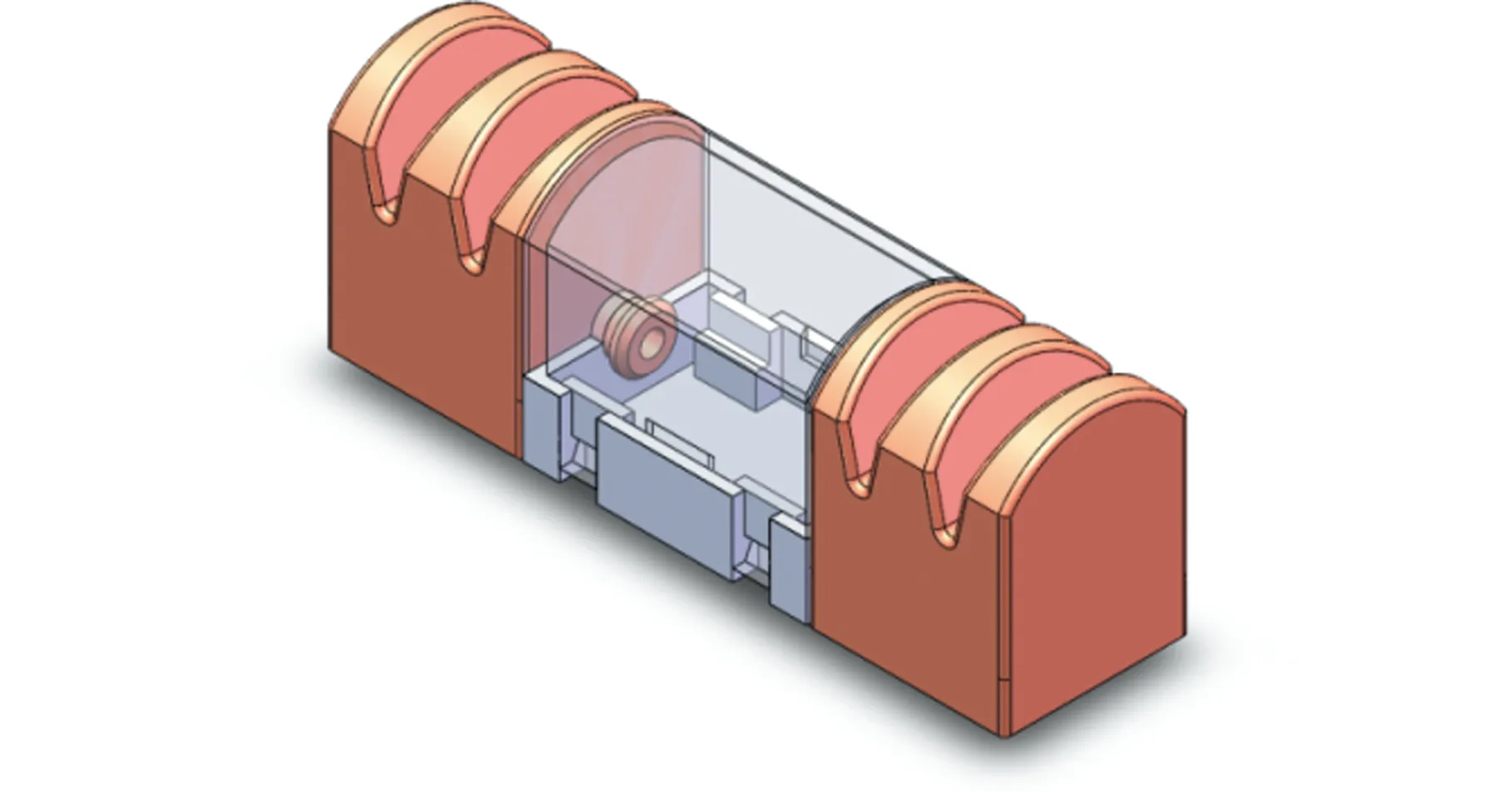
圖2 剛性指節中空結構Fig.2 Hollow structure of rigid knuckle
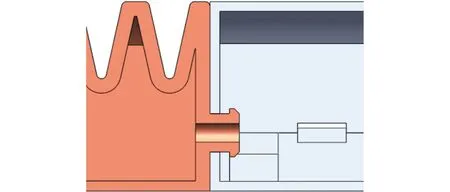
圖3 軟體關節與剛性指節接口Fig.3 Connector for soft joint and rigid knuckle
裝配時,先將管路接口插入軟體關節的接口內;然后將軟體關節結構放入剛性指節的殼體孔內,合上殼體;最后通過殼體上的卡扣進行固定。由于軟體關節接口的厚度大于管路接口與剛性指節殼體孔的半徑差,所以連接的過程中軟體關節接口會發生變形,從而保證了氣密性的要求。
1.3 軟體關節驅動分析
該執行器的軟體關節由硅膠材料鑄造而成。硅橡膠是典型的高分子非線性超彈性材料,目前多通過建立其應變能密度函數W模型來分析材料的力學性能[17-18]。各向同性超彈材料的應變能密度W可表示為張量C的3個不變量(aC,bC,cC)的函數:
WP=W(aC,bC,cC)
(1)
(2)
其中,λ1、λ2、λ3分別為x、y、z方向的主伸長比[16]。本文采用的硅橡膠材料形變量相對較大,因此選用Yeoh模型[17,19-20]并將其簡化,保留前兩項,得到應變能密度函數:
W=C10(aC-3)+C20(aC-3)2
(3)
其中,C10、C20為材料常數。所設計的軟體關節執行器可視作多個相同的氣囊單元串聯結構。假設每個氣囊的形變相同,且硅橡膠材料不可壓縮,每個氣囊的受力變形形式如圖4所示。
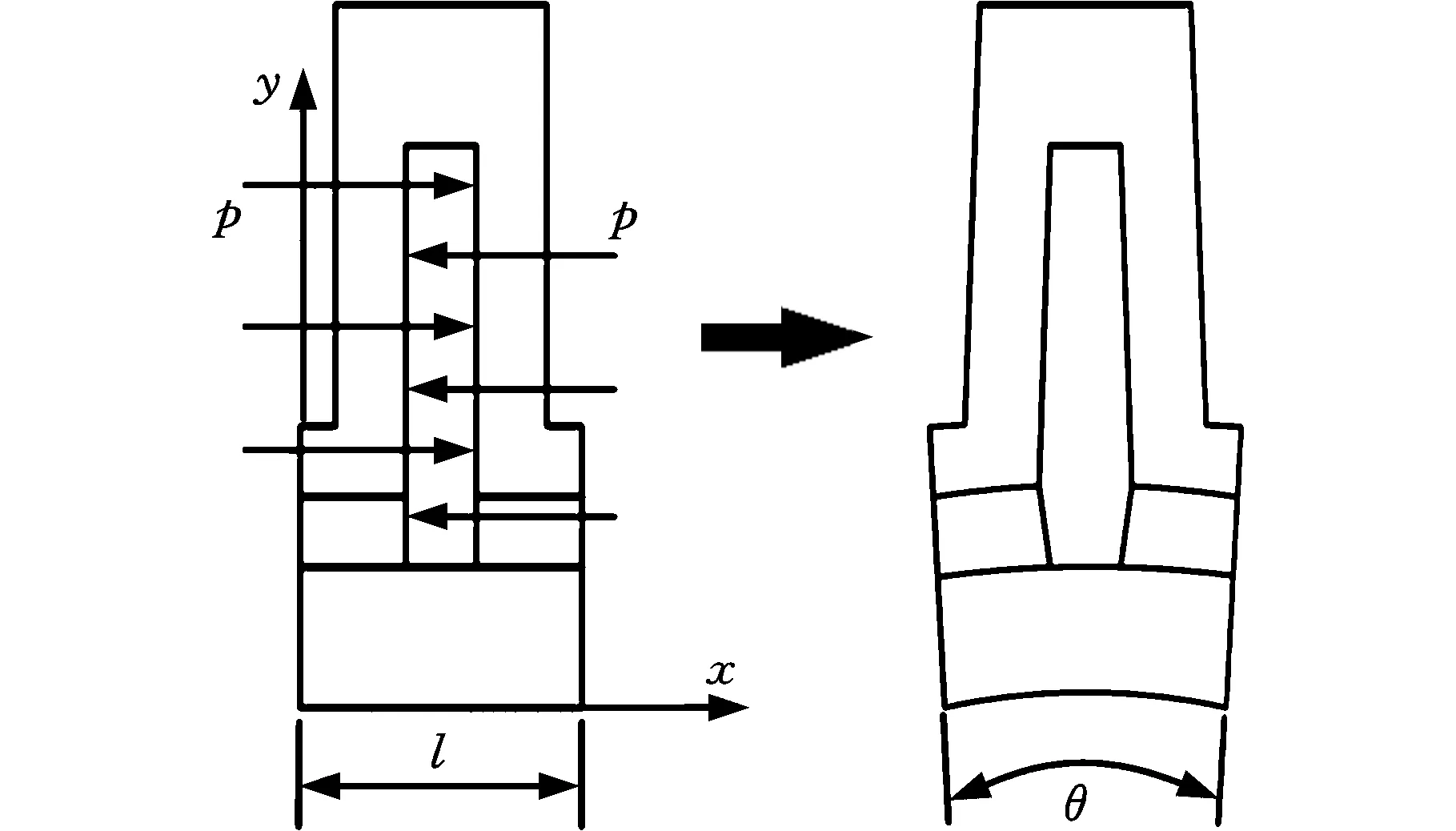
圖4 氣囊變形形式Fig.4 Airbag deformation
應變能密度函數W對氣囊的彎曲角度θ(rad)求導可得
(4)
假設驅動氣體做的功全部轉化為驅動器形變的勢能,根據虛功原理,有
pdVK+VSdW=0
(5)
其中,p為驅動氣壓;VS為硅橡膠體積,mm3;VK為氣囊腔體體積,mm3。整理式(5)可得
(6)
其中,Vx、Vy為x、y方向兩側外壁硅橡膠的體積;Wx、Wy為應變能密度函數在x、y方向的分量。式(6)只含p與θ兩個未知數,因此在已知驅動氣壓p的情況下即可確認單個氣囊的彎曲角度θ,乘以驅動器氣囊的個數并考慮剛性指節即可獲得驅動器整體的彎曲角度。
1.4 剛軟結合手指執行器設計
可穿戴手指康復裝置由5根與手指接觸的剛軟結合手指執行器組成,氣動手指執行器通過粘接與手套連接。每根氣動手指由3個軟體關節、3個剛性指節和軟體底板組成,通入壓力氣體時產生彎曲運動。氣動手指執行器上的3個氣動軟體關節通過氣路連接,采用欠驅動原理,當氣路中通入壓力氣體時,3個關節同時產生彎曲運動,進而帶動整個手指產生彎曲運動,實現對手部抓、握、捏等功能的康復運動。剛柔結合手指執行器組成的可穿戴手指康復裝置結構如圖5所示。
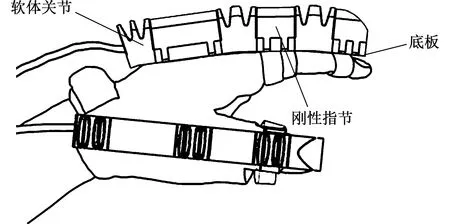
圖5 剛軟結合手指執行器Fig.5 Rigid and soft combined finger actuator
2 剛軟結合手指執行器有限元分析
基于所設計的剛軟結合手指執行器結構進行有限元應力與變形分析。首先為各部分創建材料,并進行組裝與合并,設置重力及腔室內壁壓力載荷;然后增加結合交互以防止當一個軟體關節足夠膨脹時相鄰的氣室壁會相互接觸;最后對模型進行網格劃分。設置的關節材料參數為:密度1130 kg/m3,應變勢能Yeoh,輸入源系數C10=0.11,C20=0.02,通過硅橡膠試樣的拉伸試驗獲得。指節材料參數為:密度750 kg/m3,應變勢能Yeoh,彈性模量6500 MPa,泊松比0.2。有限元仿真模型如圖6所示,其中施加重力加速度9.810 m/s2,氣體壓力0.1 MPa。圖7和圖8為采用原始PneuNet關節結構和本文所設計關節結構的有限元應力云圖。
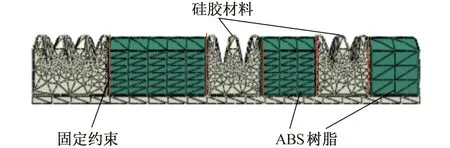
圖6 執行器有限元模型Fig.6 Finite element model of the actuator

圖7 PneuNet結構應力云圖Fig.7 Stress nephogram of PneuNet structure
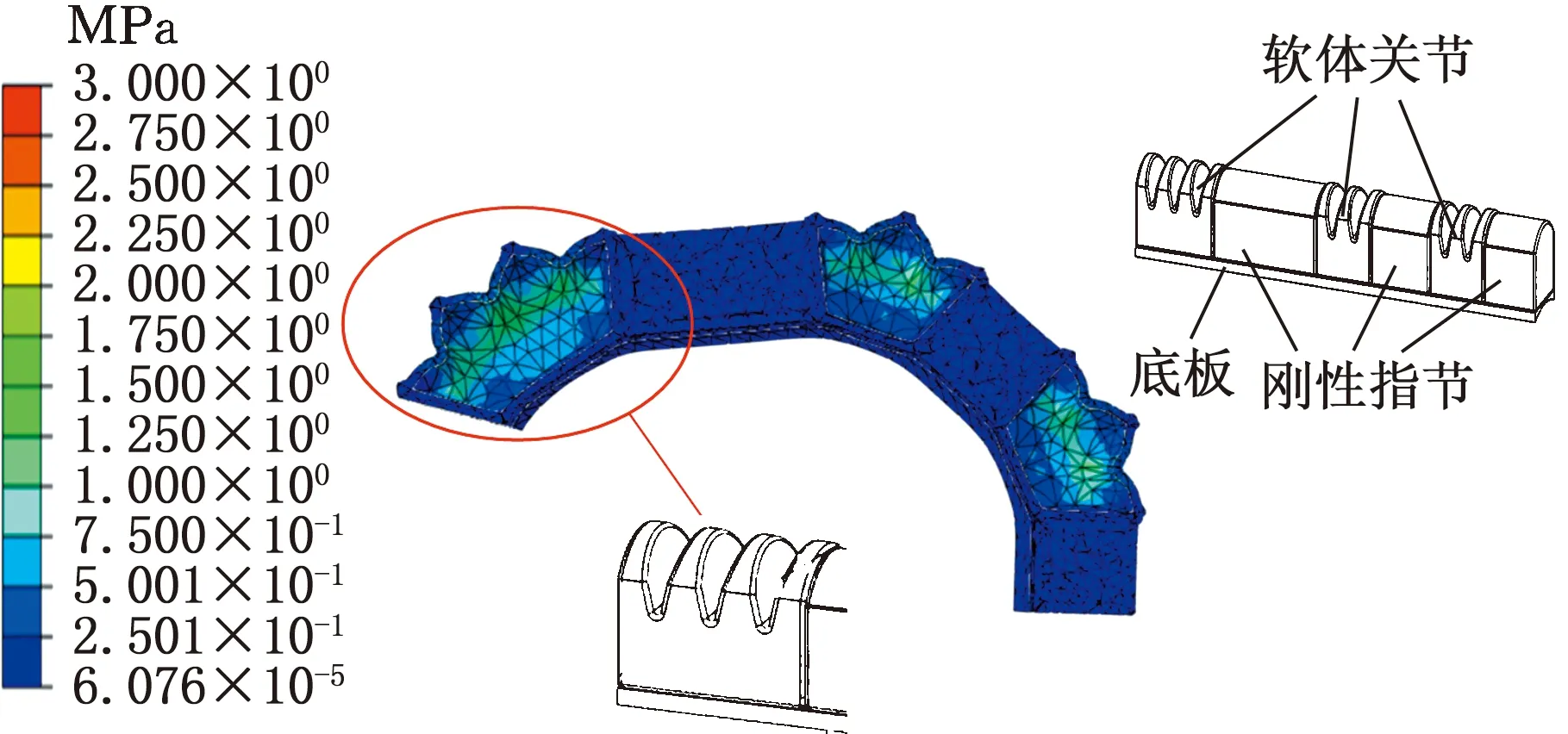
圖8 剛軟結合手指結構應力云圖Fig.8 Stress nephogram of rigid and softcombined finger structure
由圖7和圖8可知,本文改進的軟體關節結構模型的應力集中現象得到了改善,最大應力由8.72 MPa降低到2.81 MPa,降低了67.8%。實驗結果證明改進后的軟體關節結構合理,可有效減小應力集中。對單根氣動手指軟體關節分別施加0 MPa、0.02 MPa、0.04 MPa、0.06 MPa、0.08 MPa、0.10 MPa壓力,獲得手指執行器在對應壓力下的彎曲角度如圖9所示。
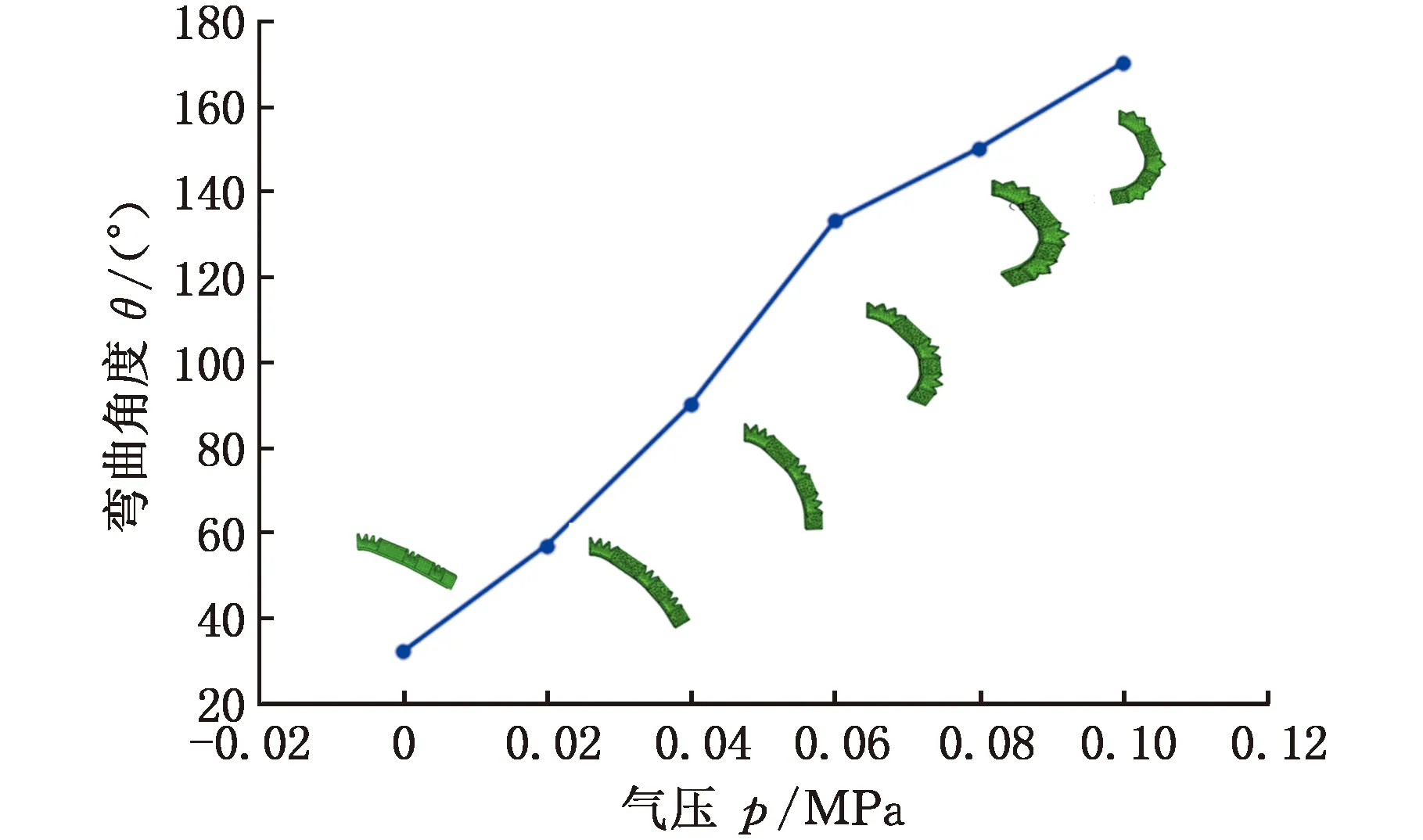
圖9 剛軟結合手指p-θ對應圖Fig.9 The p-θ correspondence diagram of rigid andsoft combined finger
3 剛軟結合手部康復裝置制作
該剛軟結合手部康復裝置的每根手指執行器由軟體關節、剛性指節、管路、接頭和底板組成。剛性指節材料為光敏樹脂,采用3D打印方法制作。軟體關節與底板為硅膠材料,采用鑄造方法獲得。氣動軟體關節是由硅膠材料制成的中空結構,注入壓力氣體,通過硅膠的變形以實現關節彎曲。制作過程需要保證氣動軟體關節的氣密性。整個關節分成上下兩個部分分別制造,采用模型反求的原理得到模具,模具需要增加冒口以提升質量。
設計的模具如圖10所示。每個氣動軟體關節模具由上腔頂模、上腔底模、下腔頂模和下腔底模四部分構成。制作時上腔頂模與上腔底模合模制成氣動軟體關節腔室上腔,下腔頂模與下腔底模合模制成氣動軟體關節腔室下腔。上下腔室制作完成后,取下上腔底模和下腔底模,在上下腔結合處刷上硅膠混合液,然后將上腔頂模與下腔頂模進行合鑄,最后得到氣動軟體關節的整體腔室。圖11所示為該氣動軟件關節的制作過程。
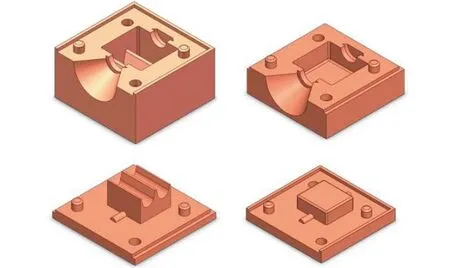
圖10 單個氣動軟體關節模具Fig.10 Single pneumatic soft joint mould
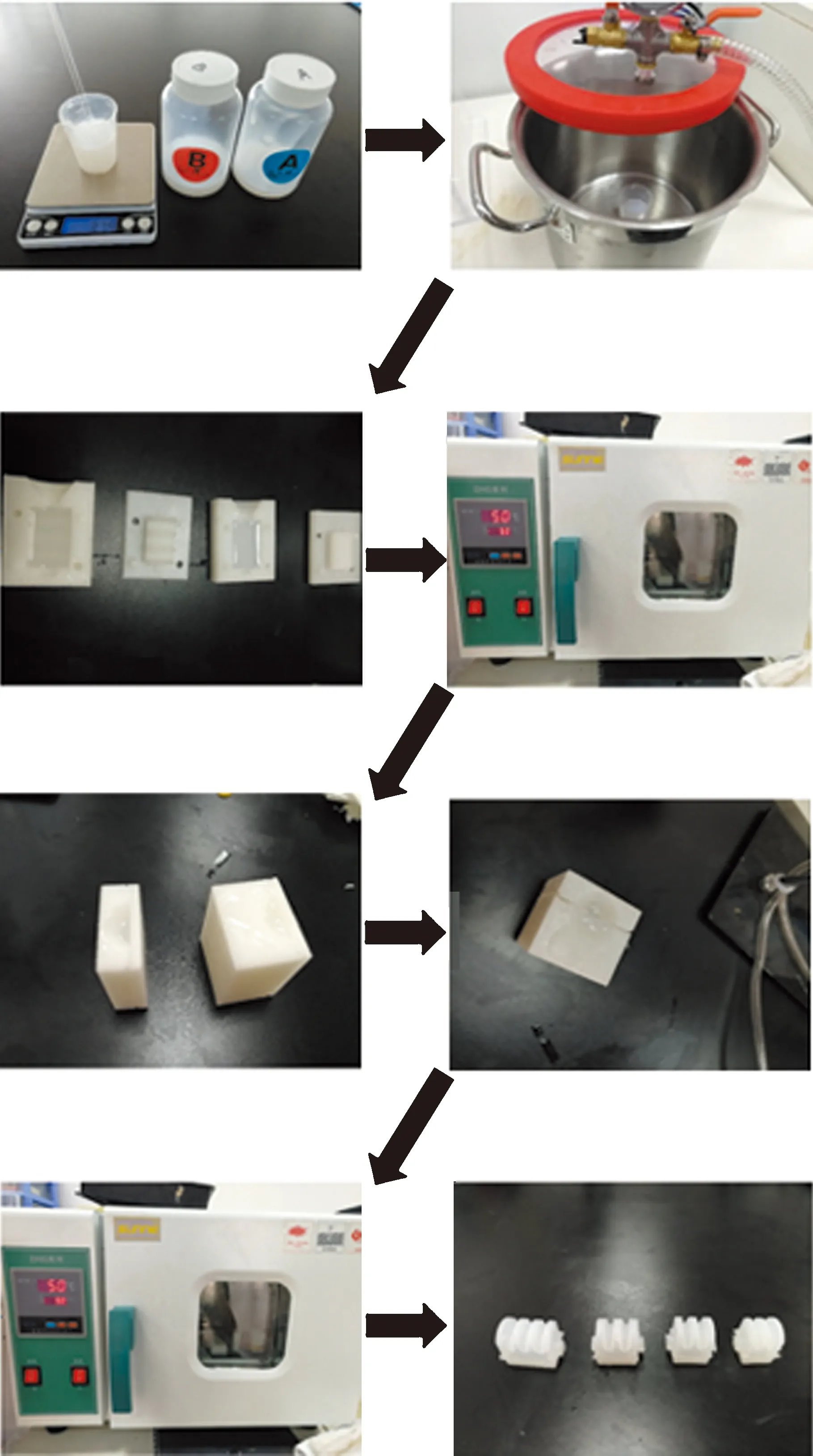
(a)按比例配置硅膠混合液 (b)除去混合液中的氣泡 (c)倒入模具 (d)合上模具 (e)硅膠烤制(f)上下腔室合攏 (g)再次烤制 (h)修剪與測試圖11 氣動軟體關節制作步驟Fig.11 Pneumatic soft joint manufacturing steps
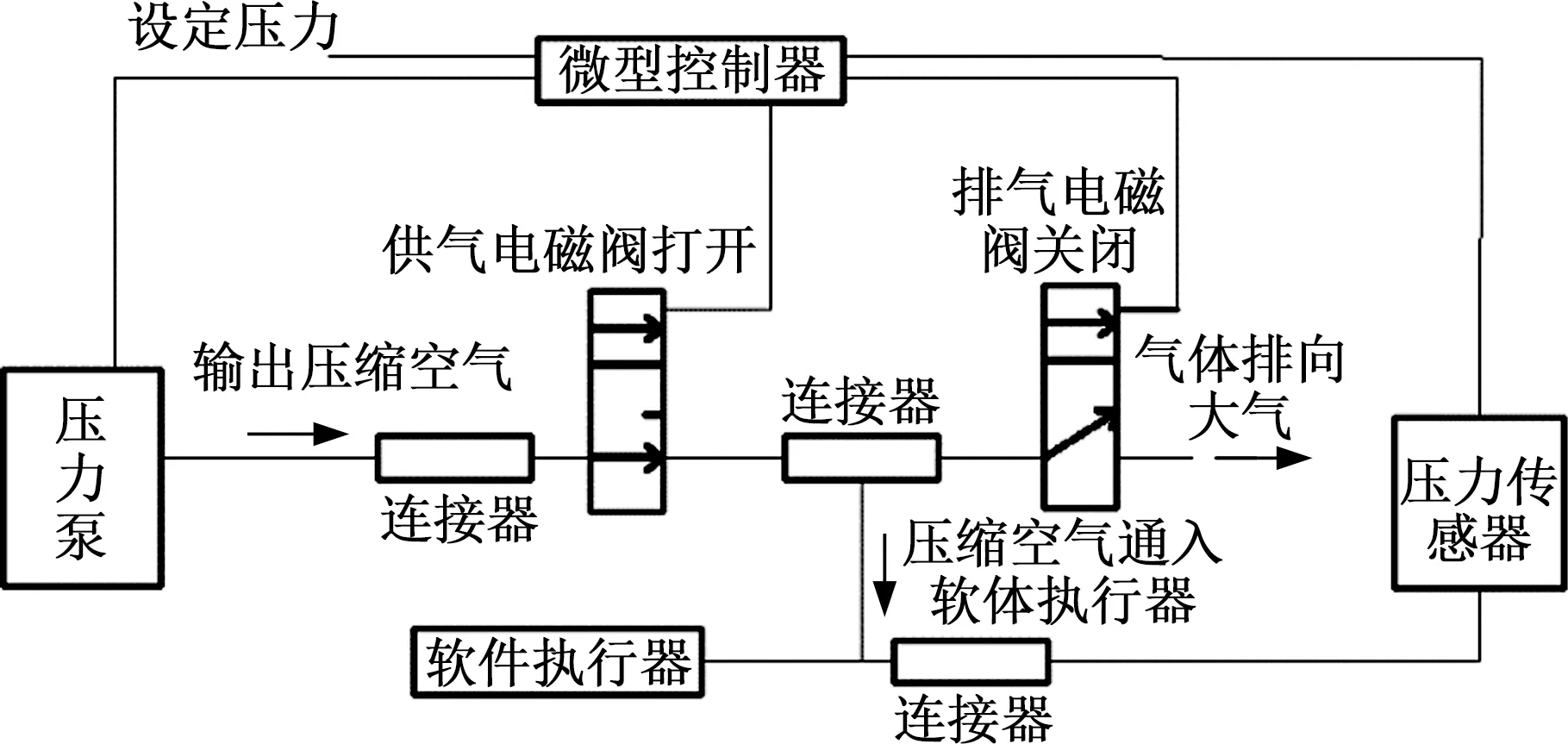
圖12 實驗控制系統原理圖Fig.12 Schematic diagram of experimentalcontrol system
采用本文模具和制作流程制成的氣動軟體關節氣密性好,質量較高,氣室內沒有氣泡,氣室壁均勻,變形良好。
4 氣動手部軟體康復裝置實驗
4.1 實驗平臺搭建
剛軟結合手部軟體康復裝置實驗平臺由支架、相機及氣動控制系統組成。相機用于獲取執行器變形信息。氣動控制系統由1個壓力泵、1個微型控制器、2個電磁閥、1個壓力傳感器和3個連接器組成,系統原理如圖12所示。工作時,向微型控制器輸入預設壓力值,微型控制器控制壓力泵工作。此時供氣電磁閥打開,排氣電磁閥關閉,壓力泵產生的壓力氣體通往軟體執行器,使執行器產生彎曲。壓力傳感器通過連接器與執行器的氣路聯通,實時檢測執行器處的壓力值,并將壓力值傳到微型傳感器處,與預設壓力值進行比較。若檢測壓力值小于預設壓力值,則電磁閥的閉合狀態不變;若檢測壓力值大于預設壓力值,則排氣電磁閥打開,供氣電磁閥關閉,以控制軟體執行器內的壓力保持動態平衡。利用該實驗平臺進行單根氣動手指的彎曲特性和指尖力測量實驗。
4.2 單根手指彎曲測試實驗
將氣動手指執行器的第一個關節一端垂直固定,使整個手指執行器與地面平行,彎曲面垂直于地面。在手指執行器等高處安裝相機,拍攝其在通入壓力氣體后的變形情況。對單根氣動手指軟體關節分別施加0、0.02 MPa、0.04 MPa、0.06 MPa、0.08 MPa、0.10 MPa壓力,在每個壓力下,待被測氣動手指變形穩定后,用相機拍攝氣動手指的變形情況,如圖13所示。仿真與實驗的變形情況對比如圖14所示,由實驗結果可以看出,在不同壓力的情況下,單根氣動手指彎曲變形情況與有限元分析結果大致相同。

(a)p=0 (b)p=0.02 MPa(c)p=0.04 MPa

(d)p=0.06 MPa (e)p=0.08 MPa(f)p=0.10 MPa圖13 單根氣動手指彎曲變形Fig.13 Bending deformation of single pneumatic finger
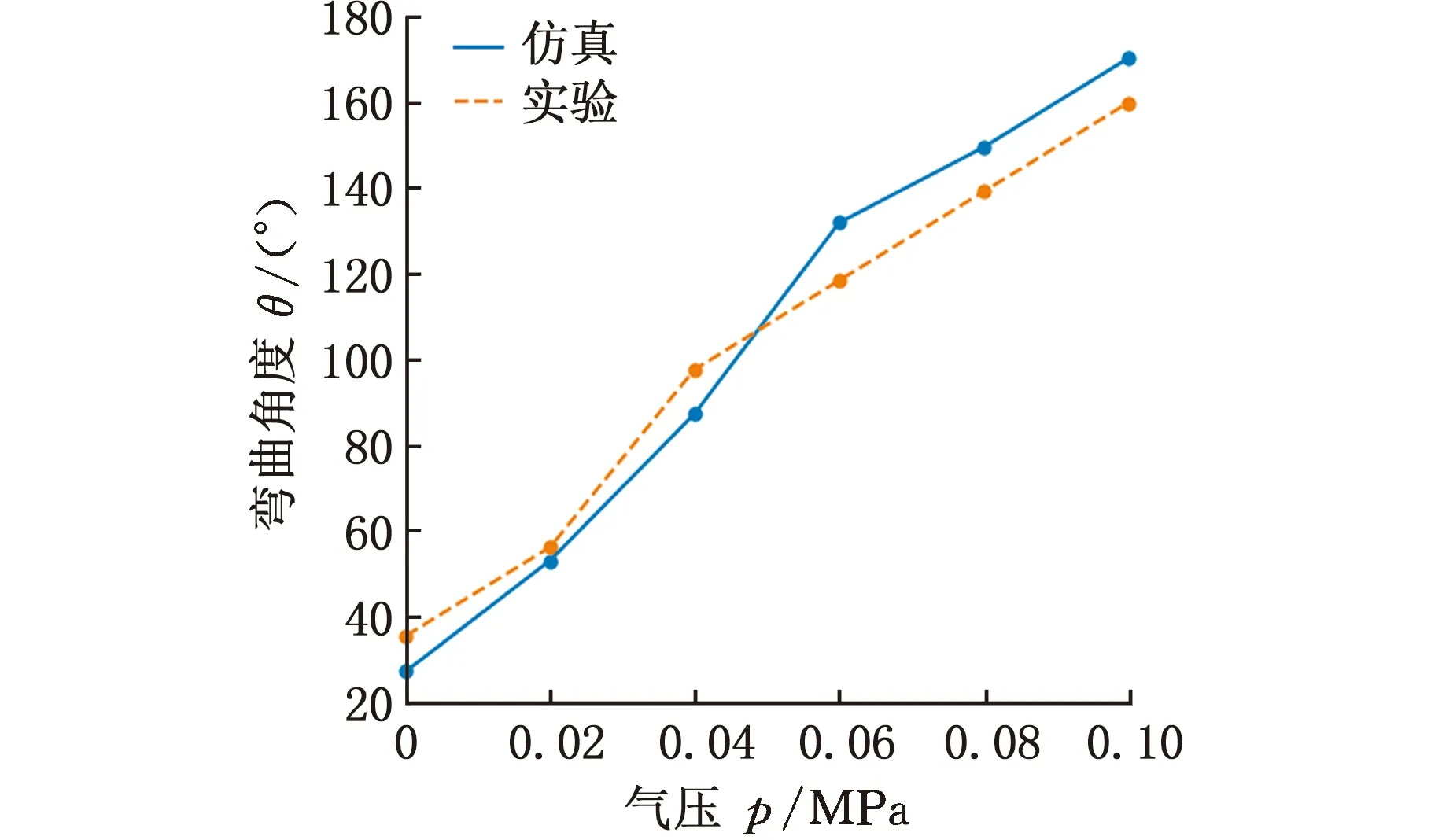
圖14 仿真與實驗的變形情況對比Fig.14 Deformation comparison of simulationand experiment
4.3 單根手指指尖力測試實驗
為了研究氣動手指的靜力學特征,搭建了單根手指指尖力測量的實驗平臺,如圖15所示。實驗平臺由電腦、控制器、氣泵、連接器、壓力傳感器、支架、平臺以及電子秤(精度為0.01 g)組成。
圖15 手指指尖力測量實驗平臺Fig.15 Experimental platform for fingertipforce measurement
實驗得到指尖力與通入氣壓的關系如圖16所示。由實驗結果可知,指尖力與通入氣體壓力成正比。
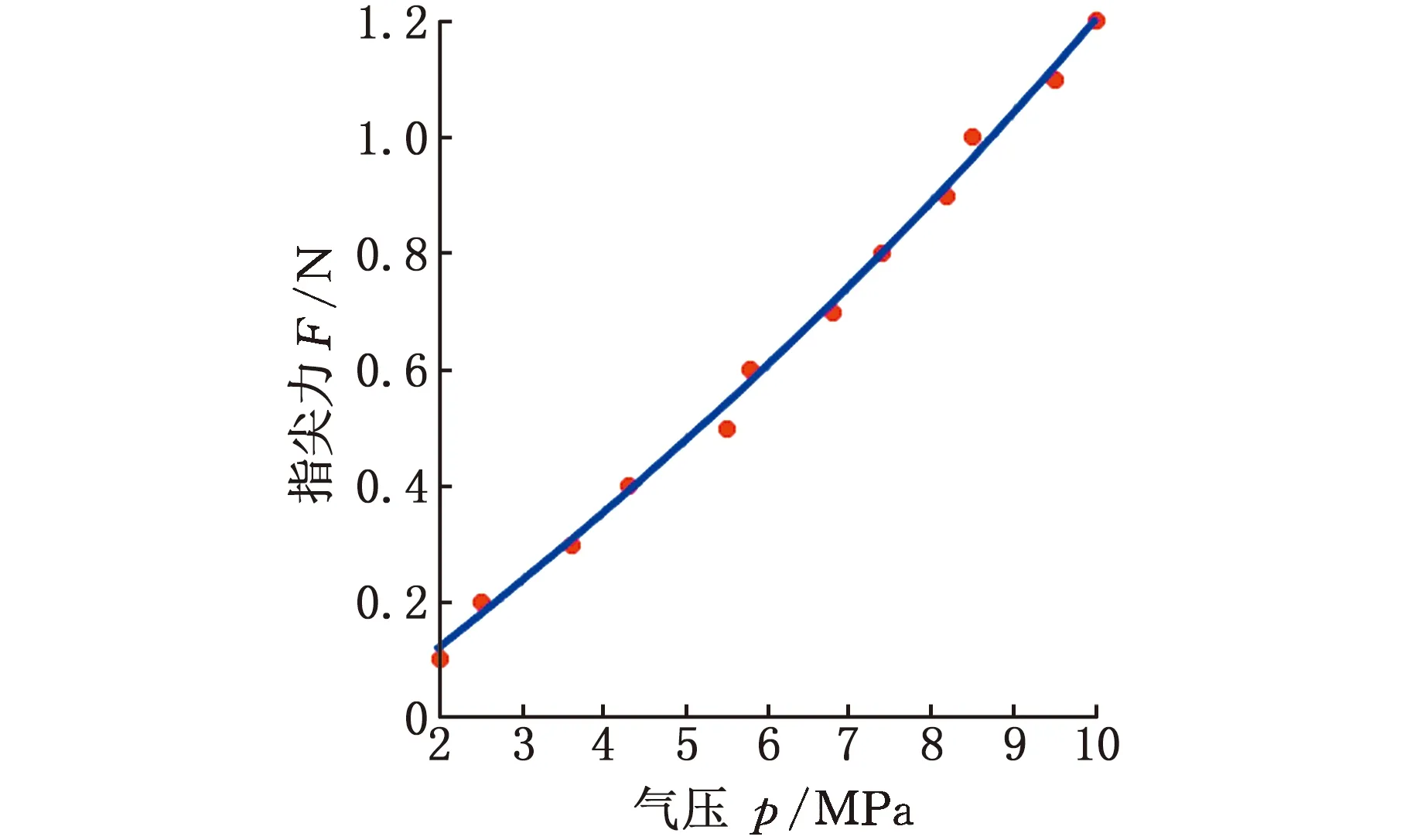
圖16 指尖力與氣體壓力關系Fig.16 Relationship between fingertip force andgas pressure
4.4 手部康復裝置抓取性能實驗
手部軟體康復裝置用于手部抓握等運動功能的康復訓練,故其帶動手部完成簡單的抓取任務是非常重要的。為觀察該剛軟結合可穿戴手部軟體康復裝置的抓取性能,實驗中對紙盒、筆筒、木塊等不同形狀的物體從不同角度抓取,實驗用品及相關參數如表5所示。實驗設置分為無手掌抓取和有手掌抓取,其中有手掌表示在裝置中集成了掌指關節的約束部分。無手掌手部康復裝置和有手掌康復裝置抓取實驗如圖17所示。食指彎曲角度和指節輸出力如圖18所示。
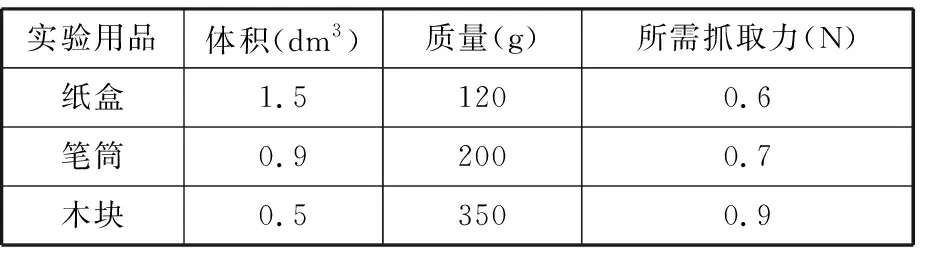
表5 實驗用品及相關參數Tab.5 Experimental supplies and related parameters
實驗結果顯示,所設計的剛軟結合可穿戴手部康復裝置能夠驅動人手完成對筆筒、紙盒、木塊的抓取,對不同形狀物體表現出較好的適應性。手部康復裝置集成手掌后,在同樣壓力作用下,整個康復裝置氣動手指執行器的彎曲變形提高了23%,抓取力提高了11.8%,能輸出1.32 N外力,性能得到了提升。

(a)無手掌康復裝置抓取實驗

(b)有手掌康復裝置抓取實驗圖17 手部康復裝置抓取實驗Fig.17 Grasping tests of hand rehabilitation device
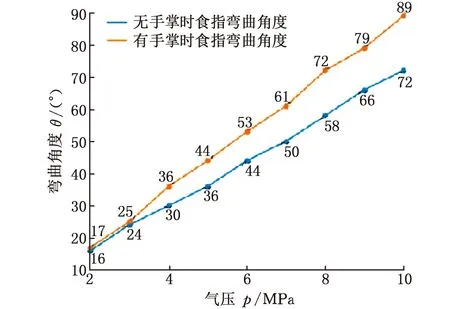
(a)食指彎曲角度
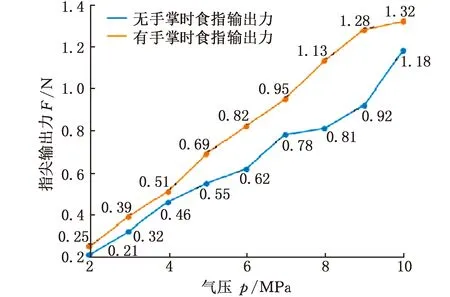
(b)食指輸出力圖18 手部康復裝置抓取性能Fig.18 Grasping performance of handrehabilitation device
5 結論
(1)設計了一種新型氣動剛軟結合可穿戴手部康復裝置執行器,在軟體關節和剛軟結合方式上均采用獨特設計,相比純柔性執行器具有更強的傳力性能和手指貼合性,相比純剛性裝置具有更高的柔性和安全性。
(2)總結了一種制造此類形狀復雜和小壁厚的硅膠產品的快速、高質量的鑄造方法。
(3)搭建了用于測試氣動手指執行器的實驗平臺,完成了單根手指彎曲變形和單根手指指尖力的測量實驗。剛軟結合可穿戴手部康復裝置通過抓握不同物體的實驗展現了良好的抓取性能,能輸出1.32 N外力,可滿足日常生活中的抓握康復訓練需求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
特別健康(2018年2期)2018-06-29 06:13:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14