基于AFSA的高速無(wú)人艇操縱模型參數(shù)辨識(shí)
2021-05-08 08:01:38楊鑫,邵興
數(shù)字海洋與水下攻防 2021年2期
關(guān)鍵詞:模型
楊 鑫,邵 興
(中國(guó)船舶重工集團(tuán)有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水面無(wú)人艇(unmanned surface vessel,USV),簡(jiǎn)稱無(wú)人艇,是一種無(wú)人化的水面智能任務(wù)平臺(tái),具有體積小、性價(jià)比高、高速智能等優(yōu)勢(shì),廣泛應(yīng)用于海洋環(huán)境監(jiān)測(cè)、水文地理勘察、海上巡邏與搜救、軍事偵察、反潛作戰(zhàn)等領(lǐng)域,近年來(lái)備受各國(guó)研究人員關(guān)注[1-3]。隨著船用發(fā)動(dòng)機(jī)、艇型優(yōu)化設(shè)計(jì)、推進(jìn)技術(shù)等的提升,無(wú)人艇的設(shè)計(jì)航速也越來(lái)越高,相應(yīng)的對(duì)其操縱性要求也越來(lái)越高[4-6]。通常為了對(duì)高速無(wú)人艇的操縱性進(jìn)行準(zhǔn)確的預(yù)報(bào)和評(píng)估,先要建立比較精確的操縱運(yùn)動(dòng)數(shù)學(xué)模型[7-8],其中操縱響應(yīng)模型結(jié)構(gòu)相對(duì)簡(jiǎn)單,應(yīng)用方便廣泛,對(duì)其研究有重要意義。
無(wú)人艇操縱響應(yīng)數(shù)學(xué)模型的建立,關(guān)鍵是如何確定數(shù)學(xué)模型中的各個(gè)參數(shù)。船舶操縱運(yùn)動(dòng)模型參數(shù)主要通過(guò)模型實(shí)驗(yàn)法、CFD仿真計(jì)算以及參數(shù)辨識(shí)法獲得[9],而參數(shù)辨識(shí)法較為實(shí)用有效。它將操縱運(yùn)動(dòng)船舶視為一個(gè)動(dòng)態(tài)系統(tǒng),通過(guò)試驗(yàn)測(cè)得系統(tǒng)輸入(舵角、螺旋槳轉(zhuǎn)速等控制量)和系統(tǒng)輸出(船速、艏向角等運(yùn)動(dòng)量),再運(yùn)用模型辨識(shí)方法,對(duì)模型中的參數(shù)進(jìn)行求解。
當(dāng)前,在國(guó)內(nèi)外有部分學(xué)者采用一些傳統(tǒng)辨識(shí)方法對(duì)船舶運(yùn)動(dòng)模型進(jìn)行了求解。趙大明等人應(yīng)用擴(kuò)展卡爾曼濾波算法對(duì)船舶運(yùn)動(dòng)模型參數(shù)辨識(shí),在辨識(shí)實(shí)驗(yàn)中,采用固定區(qū)間卡爾曼平滑算法進(jìn)行數(shù)據(jù)預(yù)處理,使結(jié)果收斂性有一定提升[9]。Sutulo S等人基于經(jīng)典的遺傳算法,進(jìn)行了操縱數(shù)學(xué)模型辨識(shí)[10];上海交通大學(xué)的鄒早建團(tuán)隊(duì),應(yīng)用支持向量回歸機(jī)對(duì)船舶操縱運(yùn)動(dòng)響應(yīng)模型進(jìn)行了機(jī)理建模,同時(shí)進(jìn)行改進(jìn),結(jié)合最小二乘法以及引入粒子群算法對(duì)懲罰因子 C值進(jìn)行尋優(yōu),從核函數(shù)結(jié)構(gòu)中得到了模型中的操縱性指數(shù)[11-13]。
總結(jié)分析發(fā)現(xiàn),現(xiàn)有方法在參數(shù)辨識(shí)過(guò)程中,存在計(jì)算量大不適合在線辨識(shí)或者計(jì)算量小但泛化能力較差的問(wèn)題。人工魚群算法(AFSA)具有高效、智能尋優(yōu)的特性,所以本文基于AFSA與模型試驗(yàn)相結(jié)合的方法,對(duì)高速無(wú)人艇的操縱響應(yīng)模型進(jìn)行辨識(shí)求解,在得到比較精確模型參數(shù)的同時(shí)也提升了效率。
1 高速無(wú)人艇操縱響應(yīng)數(shù)學(xué)模型
無(wú)人艇操縱響應(yīng)模型是船舶運(yùn)動(dòng)控制領(lǐng)域中應(yīng)用最廣泛的數(shù)學(xué)模型。目前對(duì)船舶響應(yīng)模型參數(shù)辨識(shí)的研究,多數(shù)是針對(duì)比較簡(jiǎn)單的一階線性響應(yīng)模型,對(duì)于需要頻繁操舵以及大舵角操縱運(yùn)動(dòng),非線性模型更精確。常用的一階線性響應(yīng)模型如下:

式中:r表示艏向角速度;δ為舵角;K為舵效系數(shù),K越大意味著產(chǎn)生的轉(zhuǎn)艏推力越大,回轉(zhuǎn)性越好;T表示應(yīng)舵性和航向穩(wěn)定性。
考慮到高速無(wú)人艇的運(yùn)動(dòng)復(fù)雜特性,一階線性模型無(wú)法有效地描述相應(yīng)的特性,因而本文對(duì)精度較高的一階非線性響應(yīng)模型中的各項(xiàng)參數(shù)進(jìn)行辨識(shí)研究。高速無(wú)人艇的一階非線性響應(yīng)模型可描述如下:

式中:α為非線性項(xiàng)系數(shù),其它變量與式(1)相同。
2 響應(yīng)模型參數(shù)辨識(shí)
2.1 人工魚群算法基本原理
人工魚群算法,主要是基于人工魚個(gè)體的覓食、聚群和追尾 3種行為進(jìn)行尋優(yōu)[14]。在 AFSA中,每條魚的位置被看作是待優(yōu)化問(wèn)題的一個(gè)可行解,每個(gè)解都有一個(gè)由適應(yīng)度函數(shù)評(píng)估的適應(yīng)度值。可以針對(duì)不同的待優(yōu)化問(wèn)題,合理地選擇不同的適應(yīng)度函數(shù)。
在每次迭代中,人工魚會(huì)通過(guò)覓食、聚群和追尾等行為來(lái)更新自己的位置狀態(tài),具體的行為描述如下。
1)覓食行為:地域每一個(gè)人工魚,令其當(dāng)前位置狀態(tài)向量為Xi,而向量Xj是人工魚在其視野范圍內(nèi)任意選擇另一個(gè)狀態(tài),如果新?tīng)顟B(tài)的食物濃度Yj大于當(dāng)前狀態(tài)的食物濃度iY,說(shuō)明得到的狀態(tài)優(yōu)于當(dāng)前狀態(tài),則向新選擇狀態(tài)靠近一步;如果Yj小于iY則重新選取新?tīng)顟B(tài)進(jìn)行比較,如果選擇次數(shù)達(dá)到最大次數(shù)try_ number后,仍不滿足移動(dòng)條件,則隨機(jī)移動(dòng)一步。該過(guò)程如公式(3)所示:
中心位置Xc的數(shù)學(xué)表達(dá)式為

向Xc移動(dòng)的過(guò)程可由公式表示為


人工魚向Xmax移動(dòng)過(guò)程可由表達(dá)式(6)描述如下:
4)公告牌:記錄人工魚最優(yōu)的狀態(tài)。人工魚獲得新的狀態(tài)后,與公告牌中記錄的狀態(tài)比較,若新獲得的狀態(tài)比公告牌中記錄的狀態(tài)更優(yōu)秀,則替換掉公告牌中的狀態(tài);反之,則不變。
人工魚群算法(AFSA)流程如圖1所示。
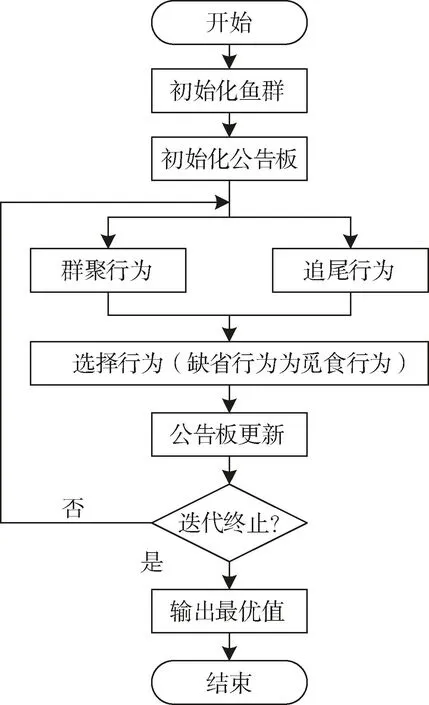
圖1 人工魚群算法流程圖Fig.1 Flow chart of AFSA
上述遞推過(guò)程中,首先生成 m條人工魚個(gè)體作為初始魚群,在參數(shù)區(qū)間內(nèi)為每個(gè)人工魚隨機(jī)初始化一個(gè)位置狀態(tài)向量X,然后計(jì)算其追尾行為、聚群行為的適應(yīng)度值Y,采用行為選擇策略,選擇最優(yōu)的行為作為魚的移動(dòng)方向,缺省行為是覓食行為。計(jì)算出每條魚的食物濃度函數(shù)值Y(目標(biāo)函數(shù)),將最優(yōu)值與公告板中的值進(jìn)行比較,以完成對(duì)公告板上最優(yōu)的值的實(shí)時(shí)更新。直到迭代次數(shù)達(dá)到N,最終公告板中的值就是最優(yōu)值,對(duì)應(yīng)的狀態(tài)向量X即為最優(yōu)解。
2.2 基于AFSA的構(gòu)造辨識(shí)模型
對(duì)于無(wú)人艇操縱響應(yīng)模型,先將模型進(jìn)行離散化處理,并結(jié)合對(duì)應(yīng)的優(yōu)化方法構(gòu)建相應(yīng)的辨識(shí)模型,然后進(jìn)行參數(shù)辨識(shí)。
通過(guò)前向差分法,將無(wú)人艇的一階非線性響應(yīng)模型進(jìn)行離散化處理,對(duì)艏向角速度進(jìn)行差分可得:

同理,對(duì)艏向角速度r的一階導(dǎo)數(shù)r˙前向差分,可得:

將上述式(7)和式(8)代入一階非線性響應(yīng)模型式(2),得:
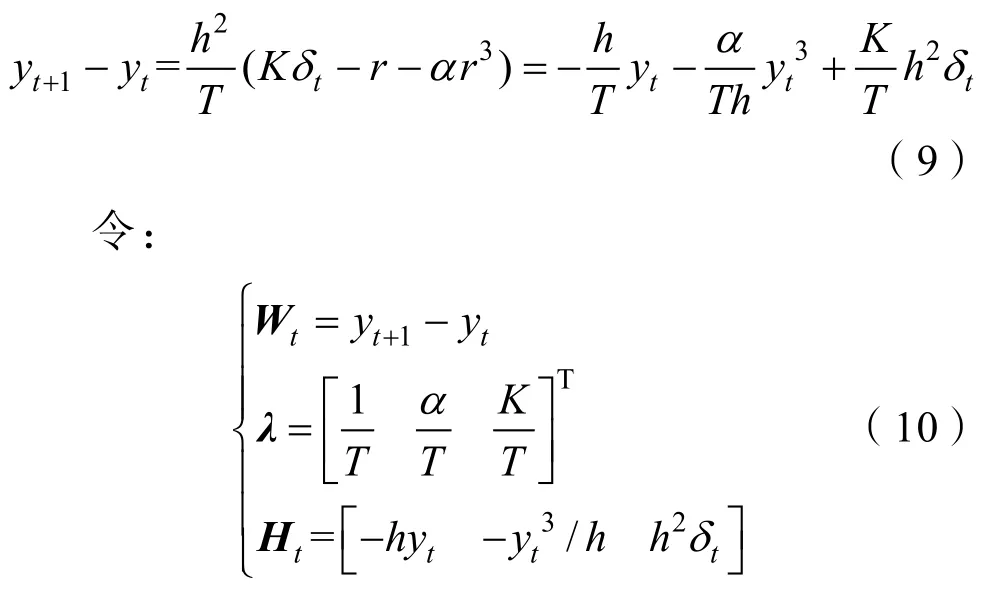
從而可將表達(dá)式(10)表示為

由此,將高速無(wú)人艇的一階非線性響應(yīng)模型轉(zhuǎn)化成離散型系統(tǒng),從而基于人工魚群算法進(jìn)行下一步求解。
基于AFSA能夠?qū)顟B(tài)向量進(jìn)行尋優(yōu)的特性。將式(11)中λ的待辨識(shí)元素作為人工魚的位置狀態(tài)量X:

其中:

為了辨識(shí)得到對(duì)應(yīng)參數(shù)值,此處確定適應(yīng)度函數(shù)為
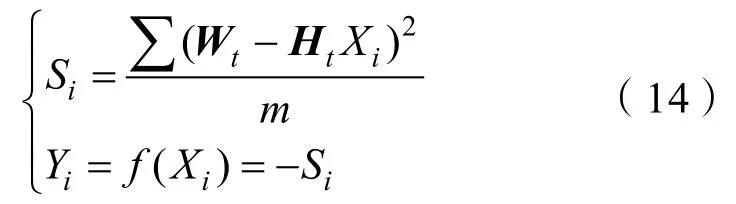
上述適應(yīng)度函數(shù)即為計(jì)算樣本的方差,其優(yōu)化目標(biāo)即為使得樣本方差S最小。由此將基于人工魚群算法來(lái)求解目標(biāo)函數(shù)Y的最大值,即可得到方差S最小情況下的狀態(tài)量X。
2.3 采集數(shù)據(jù)參數(shù)辨識(shí)
從文獻(xiàn)[15]中選取1組一階非線性響應(yīng)模型參數(shù),如表1所示。

表1 一階非線性響應(yīng)模型參數(shù)Table 1 Parameters of fist-order nonlinear response model
采用工程上廣泛應(yīng)用的四階龍格-庫(kù)塔法(Runge-Kutta)進(jìn)行無(wú)人艇操縱運(yùn)動(dòng)的仿真預(yù)報(bào):基于表1中的響應(yīng)模型開(kāi)展20°的Z形實(shí)驗(yàn)仿真,得到包括艏向角、舵角、角速度等數(shù)據(jù)的變化曲線如圖2所示。
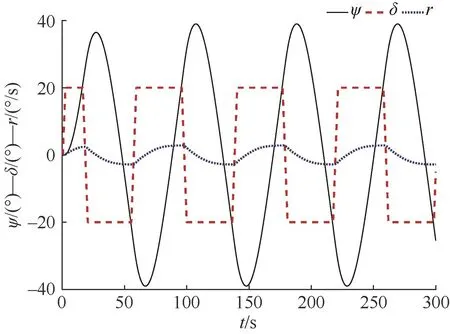
圖2 20°Z形實(shí)驗(yàn)運(yùn)動(dòng)仿真結(jié)果Fig.2 Results of 20°Z test motion simulation
將圖2中采集的仿真數(shù)據(jù)帶入式(11)中的Wt和Ht,即可基于AFSA對(duì)系統(tǒng)狀態(tài)向量X進(jìn)行狀態(tài)估計(jì)。其中,人工魚群數(shù)量m=100,最大迭代次數(shù)N=50,擁擠度因子δ=0.618。
最后,得到適應(yīng)度函數(shù)優(yōu)化值隨迭代次數(shù)變化情況,如圖3所示。
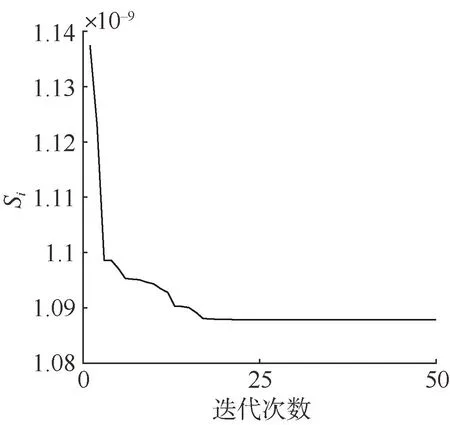
圖3 適應(yīng)度函數(shù)優(yōu)化結(jié)果Fig.3 Optimal result of fitness function
同時(shí),得到狀態(tài)向量X中x1~x3的狀態(tài)估計(jì)值,其辨識(shí)結(jié)果如圖4-6所示。

圖4 x1的辨識(shí)結(jié)果Fig.4 Identification result ofx1
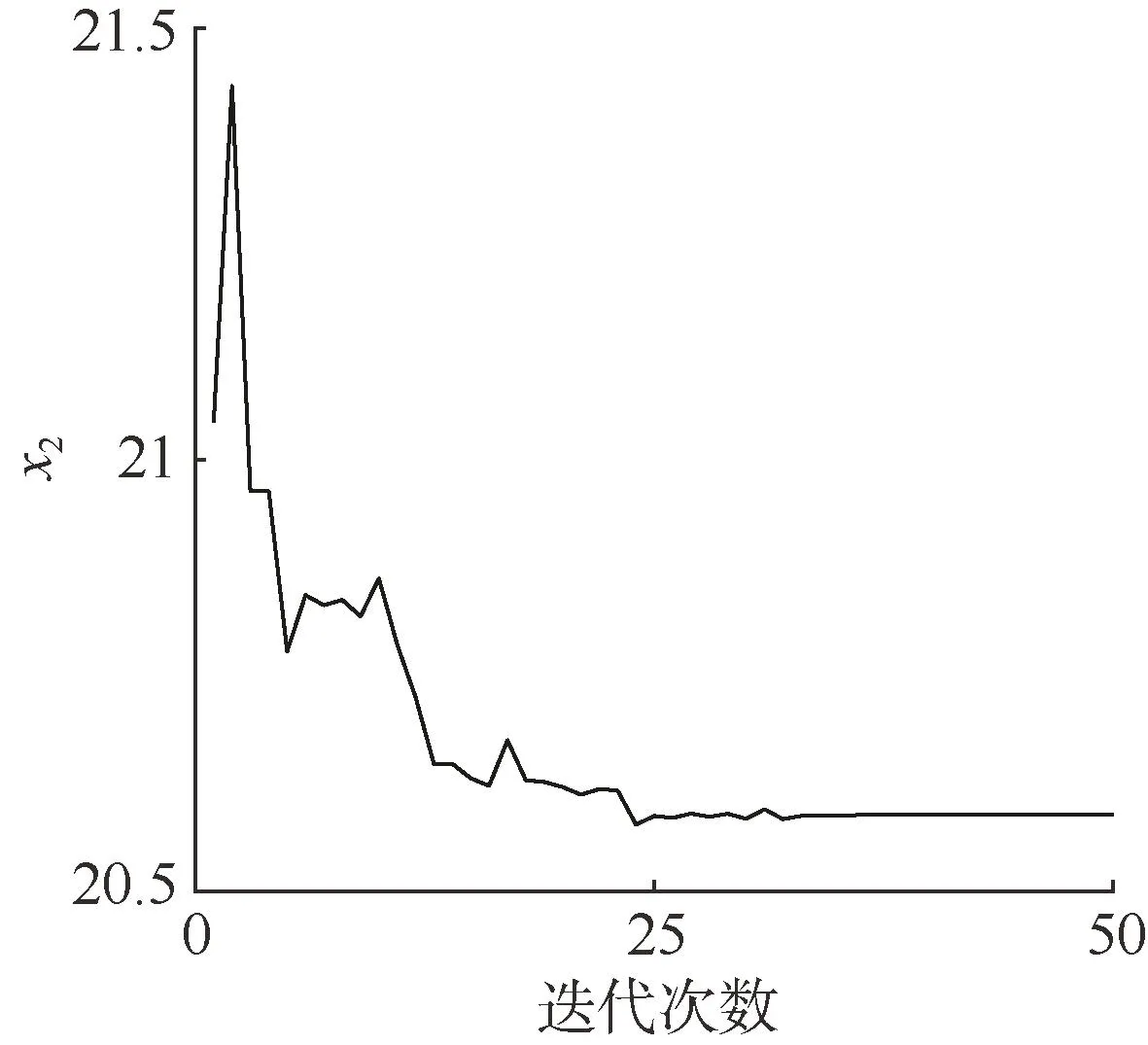
圖5 x2的辨識(shí)結(jié)果Fig.5 Identification result ofx2
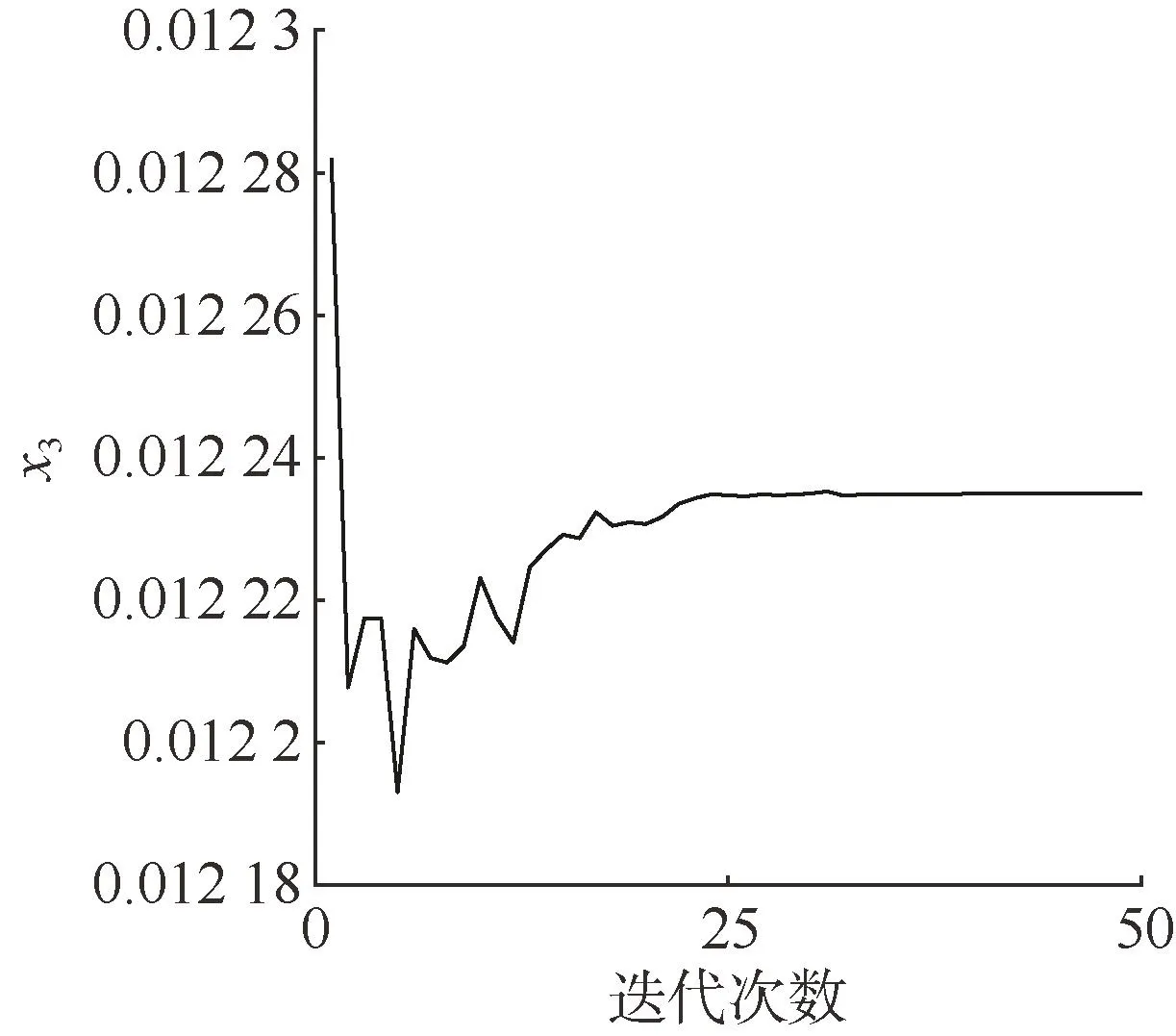
圖6 x3的辨識(shí)結(jié)果Fig.6 Identification result ofx3
x1~x3的最終辨識(shí)結(jié)果如表2所示。

表2 x1~x3辨識(shí)結(jié)果Table 2 Identification result ofx1~x3
由上述表 2可得到式(10)中向量的各個(gè)元素辨識(shí)結(jié)果,進(jìn)一步解方程即可辨識(shí)得到無(wú)人艇操縱運(yùn)動(dòng)一階非線性響應(yīng)模型中的各個(gè)參數(shù),如表3所示。
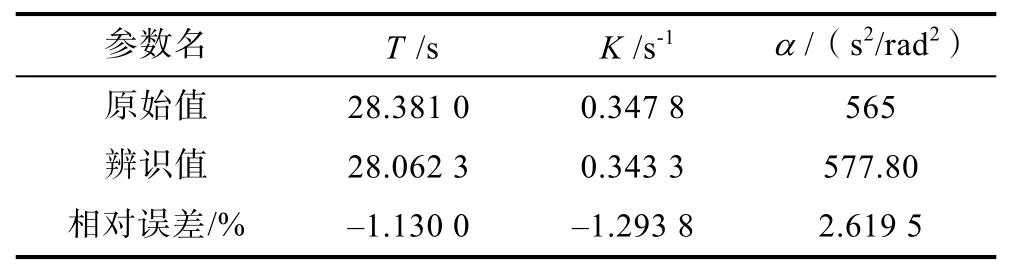
表3 一階非線性響應(yīng)模型參數(shù)Table 3 Parameters of first-order nonlinear response model
由表3可以發(fā)現(xiàn),基于AFSA辨識(shí)得到的無(wú)人艇操縱運(yùn)動(dòng)一階非線性響應(yīng)模型的各個(gè)參數(shù)精確度相對(duì)較高。
3 辨識(shí)結(jié)果分析與驗(yàn)證
為驗(yàn)證模型參數(shù)辨識(shí)的最終效果,對(duì)辨識(shí)所得的響應(yīng)模型進(jìn)行操縱運(yùn)動(dòng)實(shí)驗(yàn)仿真,并將模型輸出的艏向角變化曲線與原始模型進(jìn)行對(duì)比。首先,分別對(duì)原始模型和辨識(shí)模型進(jìn)行20°Z形實(shí)驗(yàn)仿真,其艏向角的變化曲線如圖7所示。
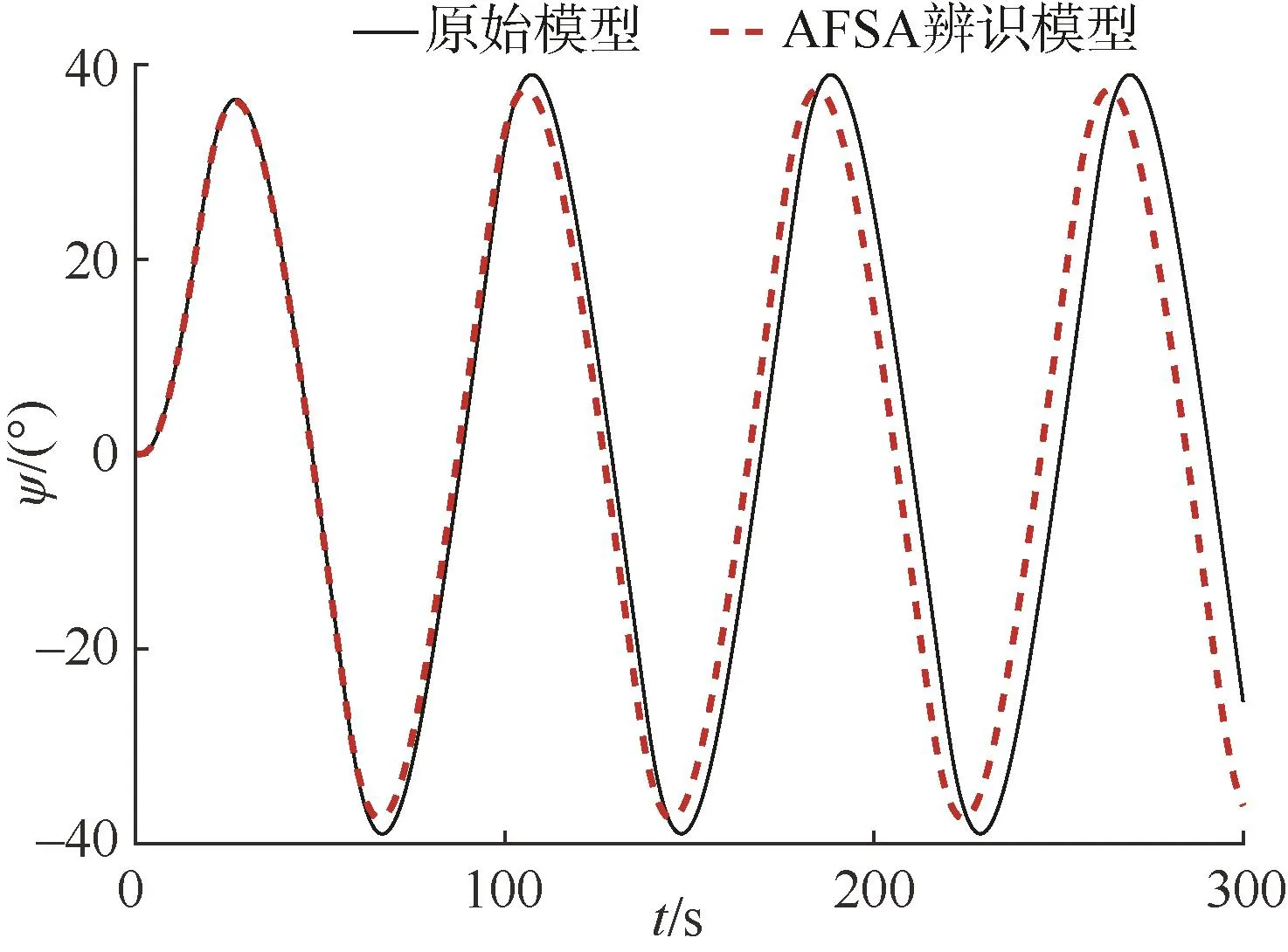
圖7 20°Z形實(shí)驗(yàn)仿真對(duì)比Fig.7 Comparison of 20° Z test motion simulation
由圖7可以看出,辨識(shí)模型所對(duì)應(yīng)的艏向角變化曲線在前 60 s幾乎與原始模型的艏向角變化曲線重合,誤差很小。隨著時(shí)間的推移,兩條曲線的間距逐漸增大。這主要是由于辨識(shí)結(jié)果與原始模型參數(shù)不完全相同,必然會(huì)引起誤差。而隨著時(shí)間的增加,誤差也不斷累積,最終導(dǎo)致二者的偏差逐漸擴(kuò)大。
考慮到在無(wú)人艇的實(shí)際運(yùn)動(dòng)控制過(guò)程中,舵角會(huì)實(shí)時(shí)根據(jù)需要進(jìn)行改變,從而就不會(huì)受到累計(jì)誤差的影響,這就說(shuō)明基于人工魚群算法的響應(yīng)模型辨識(shí)結(jié)果能夠較好地為高速無(wú)人艇的運(yùn)動(dòng)控制服務(wù)。

圖 8-9分別為 10°Z形實(shí)驗(yàn)以及 20°正弦操舵仿真對(duì)應(yīng)的艏向角的變化曲線對(duì)比圖。
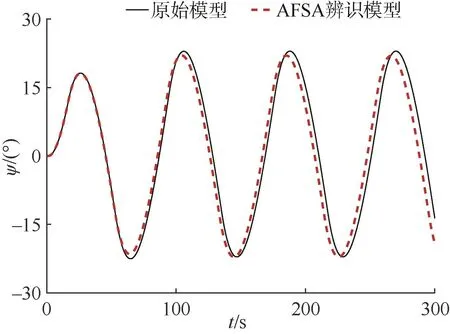
圖8 10°Z形實(shí)驗(yàn)運(yùn)動(dòng)仿真Fig.8 10° Z test motion simulation
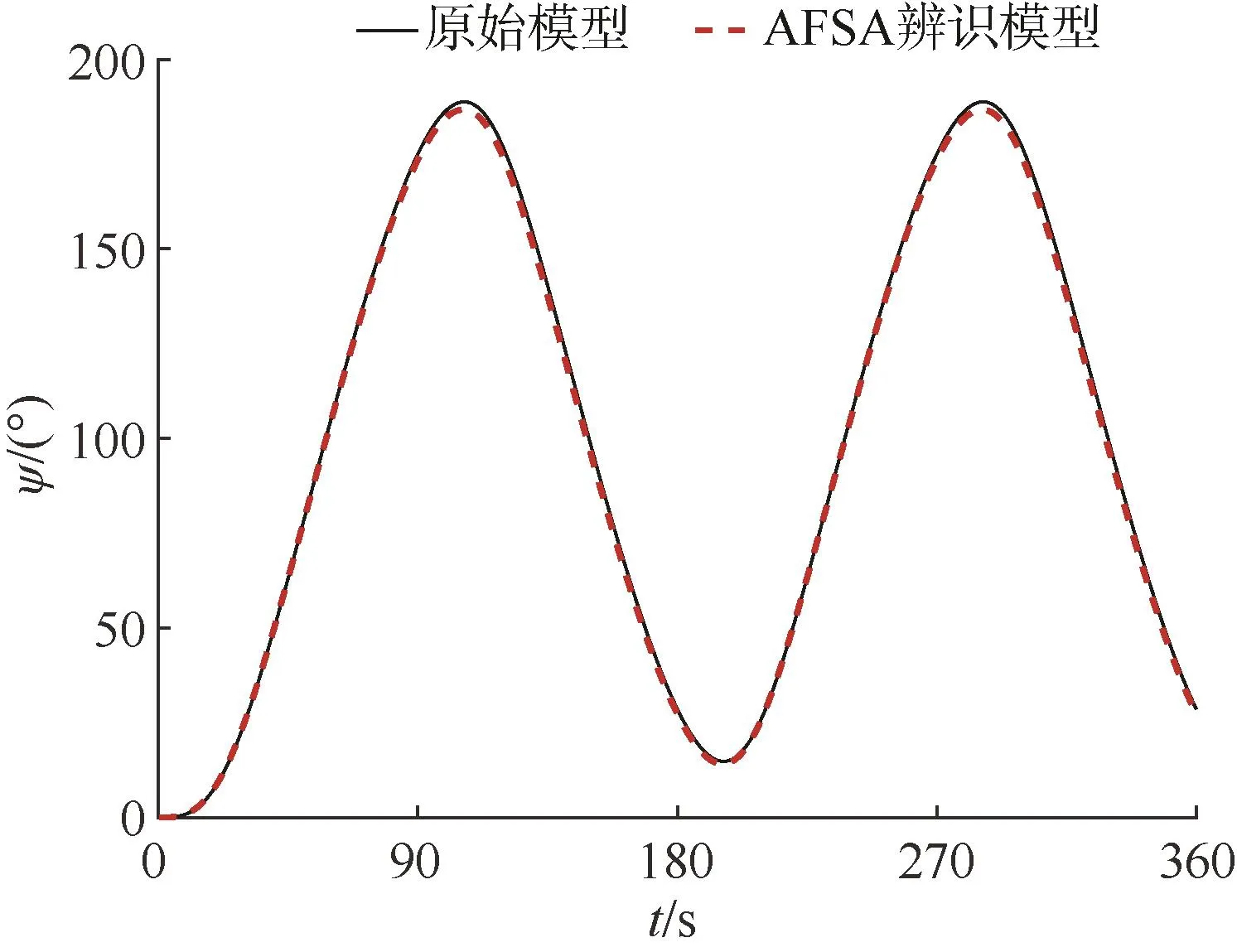
圖9 20°正弦操舵運(yùn)動(dòng)仿真Fig.9 Simulation of 20° Sin steering motion
由圖8-9可知,分別從舵角和運(yùn)動(dòng)類型兩個(gè)維度進(jìn)行改變,對(duì)辨識(shí)模型進(jìn)行不同舵角以及不同類型的運(yùn)動(dòng)仿真,其艏向角的變化曲線與原始模型的誤差較小,說(shuō)明基于人工魚群算法對(duì)高速無(wú)人艇的一階非線性響應(yīng)模型參數(shù)辨識(shí)結(jié)果具有良好的泛化能力,能夠較好地適應(yīng)不同舵角下的操縱運(yùn)動(dòng),從而更好地實(shí)現(xiàn)高速無(wú)人艇的操縱運(yùn)動(dòng)。
4 結(jié)束語(yǔ)
針對(duì)高速無(wú)人艇的運(yùn)動(dòng)控制特性,以及其對(duì)一階非線性響應(yīng)模型的需求,本文基于人工魚群算法對(duì)高速無(wú)人艇操縱運(yùn)動(dòng)響應(yīng)模型的參數(shù)進(jìn)行辨識(shí),并結(jié)合相應(yīng)的操縱運(yùn)動(dòng)仿真實(shí)驗(yàn),得到如下結(jié)論:
1)基于AFSA能夠?qū)崿F(xiàn)對(duì)無(wú)人艇一階非線性操縱響應(yīng)模型參數(shù)的辨識(shí),并且參數(shù)的辨識(shí)精確度較高。
2)基于AFSA對(duì)高速無(wú)人艇操縱模型進(jìn)行參數(shù)辨識(shí)過(guò)程中,運(yùn)算量小、辨識(shí)結(jié)果收斂迅速,保證精度的同時(shí)具有高效性。
3)基于人工魚群算法辨識(shí)得到的響應(yīng)模型具有較強(qiáng)的泛化能力,對(duì)不同舵角以及不同操舵形式下的操縱運(yùn)動(dòng),都能夠保證足夠的準(zhǔn)確性,從而更好地對(duì)高速無(wú)人艇進(jìn)行操縱運(yùn)動(dòng)控制和預(yù)報(bào)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
