智能護理床起背機構動力學仿真研究
2021-05-08 09:13:49王丹李奇林曹宇張天成俞成濤劉凱磊
江蘇理工學院學報 2021年2期
關鍵詞:舒適性
王丹 李奇林 曹宇 張天成 俞成濤 劉凱磊
摘? ? 要:針對如何提高智能護理床起背的舒適性問題,通過UG軟件構建智能護理床起背機構的模型,利用ADAMS軟件對起背運動狀態進行仿真,分析床板在運動狀態下的角度、角速度、角加速度及摩擦系數對舒適度的影響。最后,通過試驗表明:角速度[Δω]為4.17[°]/s、角加速度[Δα]為1.36[°]/s2、電機推桿速度[v]為9 mm/s時,起背機構具有較好的舒適性。
關鍵詞:智能護理床;起背機構;舒適性;動力學仿真
中圖分類號: TH122 ? ? ? ? ? 文獻標識碼: A ? ?文章編號: 2095-7394(2021)02-0058-07
隨著我國人口老齡化、高齡化的不斷發展,老年人慢性疾病發病率也大幅度增加[1],有部分老人甚至生活不能自理,因此,針對生活無法自理老人的智能護理床需求不斷增加。國內護理床的研發起步較晚,設計水平較低,多以滿足日常生活需求為主,但近幾年有了長足的發展,在結構設計和功能上也有了很大提升。國外對護理床的研究起步較早,尤以日本和德國的設計及制造水平更為先進。日本八樂夢公司的ICARE 2司馬大電動床[2],實現了背部、腰部、膝部升降,以及背部和膝部的聯動,并且加入了稱重系統和離床報警功能,方便了病人的日常護理。但目前總體看來,國內外對于護理床的研究存在功能單一,產品雷同,舒適性、柔性化、智能化水平較低等問題。因此,本研究嘗試采用動力學仿真來分析智能護理床起背機構的受力,及其對應角速度、角加速度及角位移的合適方案,以改善護理床運動過程中的舒適度問題。胡紹忠等人[3]通過對護理床的結構設計及動力學分析,討論了各種參數對驅動轉矩的影響,為改進護理床設計結構提供了理論依據;賴李李等人[4]計算并建立了人體舒適性數據表,為研究起背機構運動的安全性和舒適性提供了依據。
1? ? 起背機構的運動學建模
1.1? 起背機構幾何建模
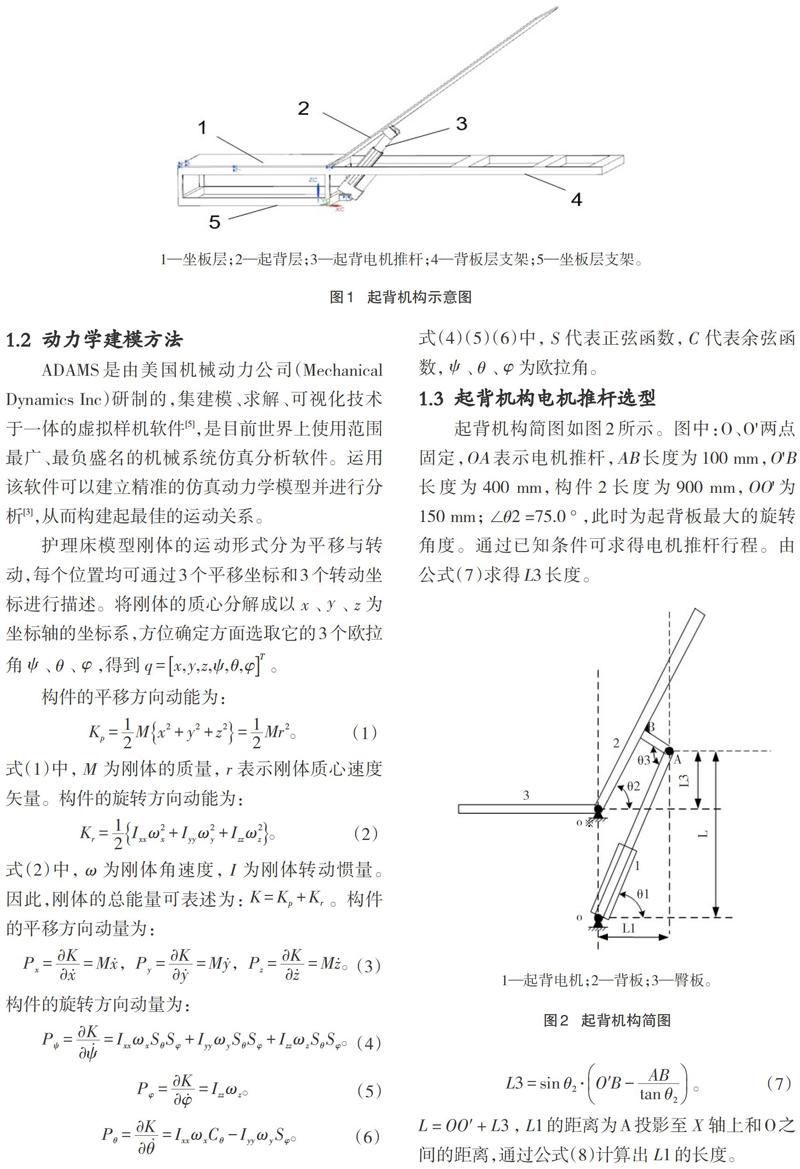
圖1為智能護理床起背機構示意圖。由圖可見,背板層支架與坐板層支架固定在一起,坐板層與起背層通過鉸鏈連接,起背層角度由電機推桿控制。電機安裝于固定架與背板活動架的鉸鏈處,通過控制電機推桿的正轉和反轉可控制背板機構的起背、落背動作。先對起背機構三維建模,再對模型進行仿真,分析其在不同狀態下對轉矩的影響,以指導改進設計和選擇適當的驅動電機。
1.2? 動力學建模方法
ADAMS是由美國機械動力公司(Mechanical Dynamics Inc)研制的,集建模、求解、可視化技術于一體的虛擬樣機軟件[5],是目前世界上使用范圍最廣、最負盛名的機械系統仿真分析軟件。運用該軟件可以建立精準的仿真動力學模型并進行分析[3],從而構建起最佳的運動關系。
護理床模型剛體的運動形式分為平移與轉動,每個位置均可通過3個平移坐標和3個轉動坐標進行描述。將剛體的質心分解成以[x]、[y]、[z]為坐標軸的坐標系,方位確定方面選取它的3個歐拉角[ψ]、[θ]、[φ],得到[q=x,y,z,ψ,θ,φT]。
構件的平移方向動能為:
1.3? 起背機構電機推桿選型
起背機構簡圖如圖2所示。圖中:O、O'兩點固定,OA表示電機推桿,AB長度為100 mm,O'B長度為400 mm,構件2長度為900 mm,OO'為150 mm;[∠θ2]=75.0[°],此時為起背板最大的旋轉角度。通過已知條件可求得電機推桿行程。由公式(7)求得L3長度。
由公式(9)求得起背機構達到極限位置時電機推桿最大極限長度為548 mm,最小極限長度為408 mm,因而可得起背電機推桿行程[H]=548-408=140 mm。根據電機推桿型號參數所得,最終選用電機推桿行程為150 mm,可滿足設計要求。
2? ? 仿真結果與分析
將UG模型導入Adams-View軟件(見圖3),隨后添加相應約束和載荷進行運動仿真。其中:固定位置擬為大地,通過固定連接6將底座與大地固定使其不動;坐板層通過固定連接1與底座相連;2為起背層,通過旋轉副將其與坐板層相連;起背層通過固定連接3與連桿相連;電機底座通過旋轉副5與底座連接;推桿通過旋轉副4與連桿連接;推桿芯與電機之間有相對移動,在此之間還需加入移動副連接。
起背運動是通過電機帶動背板層運動。給電機施加動力,控制起背板角度變化,再通過輸入不同參數得到不同的特性曲線。以背部支撐板與水平面的夾角[α]在0~75°范圍變化,載荷[F]取固定值100 kg為例分析。針對不同的摩擦系數,分析電機推桿推動背板機構的變化。
2.1? 推桿速度對背板角速度的影響
將表1中推桿速度[v]輸入仿真軟件,得到背板角速度變化曲線圖(見圖4)。由圖4可見,推桿速度[v]在7 ~12 mm/s之間變化可得到六種不同的角速度曲線。推桿速度為7 mm/s時,對應角速度變化范圍是1.95~5.21 [°]/s,最高與最低[Δω]為3.26[°]/s;推桿速度為8 mm/s時,對應角速度變化范圍是2.22~5.93[°]/s,最高與最低[Δω]為3.70 [°]/s;推桿速度為9 mm/s時,對應角速度變化范圍是2.50~6.67 [°]/s,最高與最低[Δω]為4.17 [°]/s;推桿速度為10 mm/s時,對應角速度變化范圍是2.78~7.42 [°]/s,最高與最低[Δω]為4.64 [°]/s;推桿速度為11 mm/s時,對應角速度變化范圍是3.05~8.15 [°]/s,最高與最低[Δω]為5.09[°]/s;推桿速度為12 mm/s時,對應角速度變化范圍是3.33~8.88 [°]/s,最高與最低[Δω]為5.55[°]/s。賴李李等人[4]研究表明,[Δω]變化控制在3.30~4.40[°]之間具有較好的舒適性。據此,滿足條件的分別是推桿速度為8 mm/s 和9 mm/s所對應的曲線。該曲線前半段角速度由2.22—3.10[°]平穩增加,后半段角速度由3.10—5.93[°]平穩增加,即隨著床板轉動角度增加,人體對于背板的垂直壓力逐漸減小,角速度增大以加快床板轉動過程。
2.2? 推桿速度對背板角加速度的影響
將表1中推桿速度v輸入仿真軟件進行仿真,得到背板角加速度變化曲線(見圖5)。由圖5可知:推桿速度為7 mm/s時,對應角加速度變化范圍是0.01~0.84[°]/s2,最高與最低[Δα]為0.82 [°]/s2;推桿速度為8 mm/s時,對應角加速度變化范圍是0.01~1.09 [°]/s2,最高與最低[Δα]為1.07 [°]/s2;推桿速度為9 mm/s時,對應角加速度變化范圍是0.02~1.38 [°]/s2,最高與最低[Δα]為1.36[°]/s2;推桿速度為10 mm/s時,對應角加速度變化范圍是0.02~1.71[°]/s2,最高與最低[Δα]為1.69 [°]/s2;推桿速度為11 mm/s時,對應角加速度變化范圍是0.03~2.06 [°]/s2,最高與最低[Δα]為2.03 [°]/s2;推桿速度為12 mm/s時,對應角加速度變化范圍是0.03~2.44 [°]/s2,最高與最低[Δα]為2.42[°]/s2。人體工程學研究表明[4],角加速度在1.00~2.00 [°]/s2范圍內舒適度最佳。可見,推桿速度分別為8 mm/s、9 mm/s和10 mm/s時符合該標準,再結合前文推桿速度對背板角速度的影響,得出推桿速度8 mm/s 和9 mm/s為加速度舒適性最佳。因此,取推桿速度8 mm/s和9 mm/s為本次設計的初選方案。電機推桿速度為8 mm/s時,所對應的背板機構運行時間為25 s;電機推桿速度為9 mm/s時,所對應的背板機構運行時間為22 s。為了保證機構運動在滿足舒適度的同時,能夠快速完成動作,最終確定電機推桿速度9 mm/s作為本次運動控制參數。
2.3? 推桿速度對推力的影響
以100 kg體重為例,根據重力公式[G]=[mg](g = 9.8 N/kg)可知,所施加負載為980 N。根據推桿速度為7~12 mm/s的速度控制仿真,得到背板電機推力曲線圖(見圖6)。6條曲線中,所需推力[F]的峰值最大為1 775 N,最小為1 337 N。在起背前期,背板為滿載狀態,此時需要更大的電機推力以防過載;隨著背板角度的變化,背板所承受的重量慢慢減小,電機推力隨之降低。在整個推力曲線中,沒有推力的突變。因此,選擇2 000 N的電機推桿可以滿足整個起背運動的需求。
2.4? 摩擦系數對轉矩的影響
起背機構仿真中共有三種約束,即固定約束、鉸鏈約束和接觸約束。固定約束不會產生摩擦力,鉸鏈約束和接觸約束均可產生摩擦力。其中,影響舒適性的主要是由鉸鏈約束產生的摩擦,因此以下重點討論該類摩擦。已知鋼與鋼之間的摩擦系數[μ]為0.05~0.10,圖7是鉸鏈約束摩擦系數[μ]為0.05、0.07、0.08和0.10時對轉矩的影響。由圖7可見:[μ]為最大值0.10時,對應的最大轉矩為0.28 N·m;[μ]為最小值0.05時,對應的最小轉矩是0.15 N·m。可見,摩擦系數對于轉矩的影響不是特別明顯,在鉸鏈處使用潤滑油之后,可將摩擦系數降到0.02~0.05范圍之內。
3? ? 設計測試
圖8為護理床裝置圖。為了研究電機推桿速度對起背機構舒適度的影響,在背板機構上安裝了六軸姿態角度傳感器,該傳感器可將測得的背板角速度和背板角加速度數據在上位機界面顯示(見圖9)。最后,將測得數據和仿真數據進行比較。
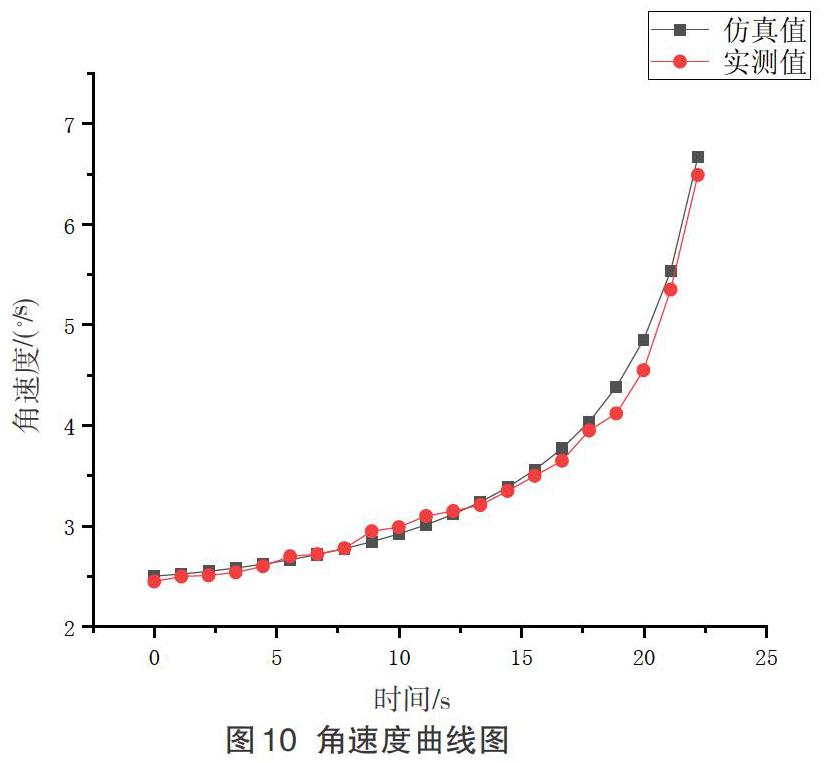
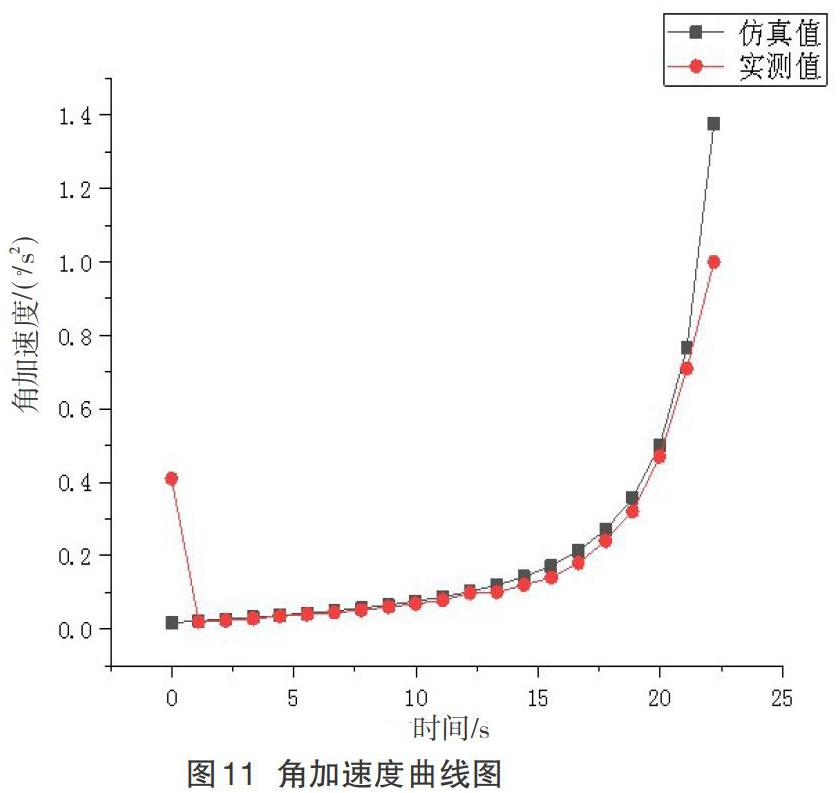
以圖5所示的推桿速度9 mm/s作為起背機構控制速度,結合仿真曲線與傳感器測得數據曲線對比,得到角速度曲線與仿真對比圖(見圖10)。圖10中,角速度仿真值最大為6.67[°]/s,實測值最大為6.50[°]/s,實驗測試參數與仿真參數基本吻合。圖11為角加速度曲線圖,在開始位置,實測值與仿真值有很大的差距,是因實際物體中存在電流、電壓以及繼電器吸合瞬間的波動干擾和一些不可避免的摩擦。在電流和電壓穩定之后,仿真值和實測值基本吻合。
4? ? ?結論
通過對護理床起背機構的動力學分析,討論了作用力、加速度、摩擦系數等因素對起背機構舒適度的影響。經過測試,角速度[Δω]為4.17 [°]/s,角加速度[Δα]為1.36 [°]/s2,電機推桿速度[v]為9 mm/s,摩擦系數[μ]為0.05時,起背機構具有較好的舒適性。
參考文獻:
[1] 劉杰,朱凌云,茍向鋒.多功能護理床發展現狀與趨勢[J].醫療衛生裝備,2019,40(7):94-98.
[2] 林妍.基于人體工程學理念下的明式坐椅設計研究[J].西部皮革,2020,42(10):27-28.
[3] 路暢,劉軍. 基于人體工程學的康復床舒適性研究[J].萍鄉學院學報,2007,34(3):26-31.
[4] 賴李李,魏鸛蓉,張娜,等.基于人機工程學的多功能殘障人輪椅設計與仿真[J].人類工效學,2019,25(2):54-61.
[5] 陳峰華. ADAMS 2018虛擬樣機技術從入門到精通[M].北京:清華大學出版社,2019:20-70.
責任編輯? ? 王繼國
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業設計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(2015年8期)2015-12-26 09:01:02