外輻射源雷達橢圓定位算法仿真及誤差分析
2021-05-10 01:06:22唐思圓
無線電工程 2021年4期
唐思圓,凌 翔
(中國電子科技集團公司第三十八研究所,安徽 合肥230088)
0 引言
外輻射源雷達是一種特殊體制下的雙基地雷達,其發(fā)射站為位置已知的廣播電視發(fā)射臺或者其他非合作的無線電發(fā)射設(shè)備,接收站為外輻射源雷達,接收目標(biāo)的反射回波,并完成對目標(biāo)的定位、跟蹤等處理[1-2]。外輻射源雷達具有探測范圍廣、反隱身能力強、生存能力強等優(yōu)點。在分布式外輻射源雷達系統(tǒng)中,通過多個輻射源或接收站的分散式部署,不僅能夠提高系統(tǒng)的空域覆蓋范圍,也可以提高重疊覆蓋區(qū)域的定位精度[3-5]。
外輻射源雷達的目標(biāo)到接收站距離無法直接測得,需要借助其他的測量量,通過基于空間幾何約束關(guān)系解算獲得。常用測距方法有距離和-角度(橢圓定位算法)、角度-角度以及雙曲定位等方法[6-8]。由于外輻射源雷達工作在低頻波段,使得天線波束的測向能力不強,導(dǎo)致到達方位角的測量精度不高。而基于頻率變化率的定位方法[9],由于頻率變化率在某些情況下(如目標(biāo)徑向或接近徑向時)非常小,難以準(zhǔn)確獲取,因此也有一定的局限性。在基于到達時間測量的外輻射源雷達中,每個發(fā)射站信號經(jīng)目標(biāo)反射后到達接收站的時間(即距離和)會形成一個橢球面,多個發(fā)射站-目標(biāo)-接收站組合對就形成多個交叉橢球面,可利用多個橢球面交叉進行目標(biāo)定位。由于外輻射源雷達中到達時間的測量精度較高,因此能夠獲得較好的定位效果。
本文中研究二維平面內(nèi)的橢圓定位算法[10]及定位精度分析。通過Matlab工具構(gòu)建仿真實驗場景,并進行橢圓定位算法定位精度研究。通過實驗分析發(fā)現(xiàn),橢圓定位算法的目標(biāo)定位精度不僅與雷達自身的測距精度有關(guān),還與發(fā)射站和接收站的布站位置相關(guān),具體實驗結(jié)論為:橢圓定位算法的定位精度與發(fā)射站和接收站之間的距離有關(guān),距離越遠(yuǎn),則定位精度越高。
1 問題描述
本文只討論雷達系統(tǒng)中含有2個發(fā)射站和一個接收站(T2R型雷達系統(tǒng))情況下的橢圓定位算法。橢圓定位算法原理圖如圖 1所示,R為雷達系統(tǒng)中的接收站,T1和T2分別為2個發(fā)射站,接收站和發(fā)射站的位置已知,分別為R(x0,y0),T1(x1,y1)和T2(x2,y2),因此可以計算出發(fā)射站T1和接收站R之間的距離L1,以及發(fā)射站T2和接收站R之間的距離L2;再通過測量同一信號經(jīng)目標(biāo)反射及由發(fā)射站直達接收站的時間差,可以間接測量出目標(biāo)距離發(fā)射站T1和接收站R的距離和r1+r0,以及目標(biāo)距離發(fā)射站T2和接收站R的距離和r2+r0。而目標(biāo)O應(yīng)位于以R和T1為焦點的橢圓以及以R和T2為焦點的橢圓的交匯處。
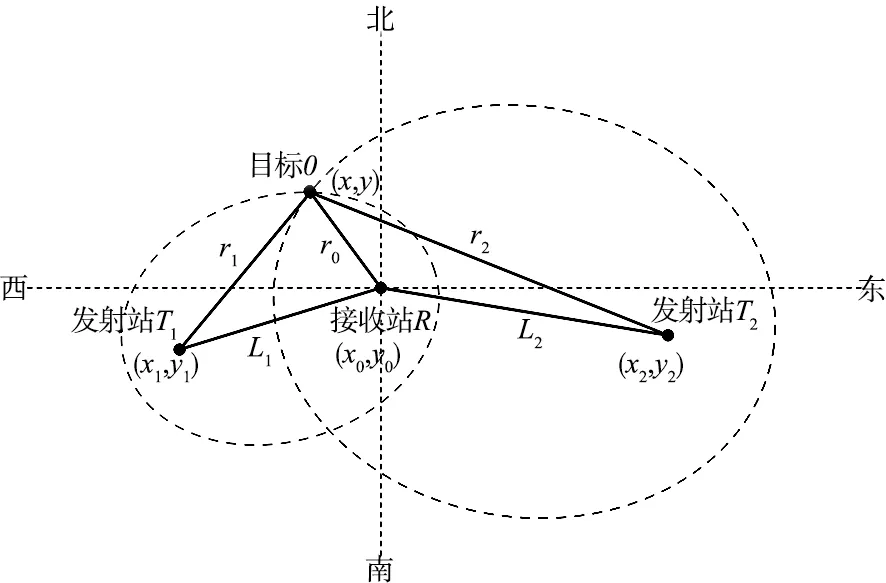
圖1 橢圓定位算法原理Fig.1 Schematic diagram of ellipse location algorithm
設(shè)雷達系統(tǒng)接收到的目標(biāo)方位角為θ,則距離和-角度定位問題可以描述為:根據(jù)上述已知接收站位置R(x0,y0),發(fā)射站位置T1(x1,y1)和T2(x2,y2),R和T1的距離和r1+r0,R和T2的距離和r2+r0,以及目標(biāo)方位信息θ,求解目標(biāo)O的位置(x,y) 。
2 橢圓定位算法
2.1 算法原理
在二維平面內(nèi),多個外輻射源信號到達接收站的距離和確定了以發(fā)射站和接收站為焦點的多個橢圓,解算橢圓之間的交點就可以確定目標(biāo)的位置。
設(shè)一個多基地系統(tǒng)中,接收站為(x0,y0) ,發(fā)射站為(xi,yi)(i=1,2), 目標(biāo)位置為(x,y)。r0表示目標(biāo)到接收站的距離,ri表示目標(biāo)到發(fā)射站i的距離,rsi表示目標(biāo)到接收站和第i(i=1,2)個發(fā)射站之間的距離和。則:
(1)
相對于TR(一個發(fā)射站和一個接收站)系統(tǒng)常用的角度/距離和定位方法,利用接收站采集到的多個外輻射源的距離和進行定位,最大優(yōu)點是定位精度高。對式(1)整理化簡可以得到:
(x0-xi)x+(y0-yi)y=ki-r0rsi,
(2)
(3)
將r0看作已知量,因此可以得到如下矩陣表達式:
Ax=B,
式中,
(4)
通過最小二乘求解x,即:
x=A-1B。
(5)
令:
(6)
得到目標(biāo)估計位置:
(7)
式中,
(8)
(9)
將x,y代入式(1)的第一個式子中,得:
(10)
式中,
(11)
將式(10)代入式(9),可以得到一個一元二次方程,而r0就是這個方程的解。設(shè):
Δ=4b2-4ac。
(12)

如果Δ=0,則r0只有一個唯一解;如果Δ>0,則r0存在2個解;而如果Δ<0,則r0沒有解。當(dāng)r0只有一個解時可以求出目標(biāo)的位置信息(x,y);而如果r0有2個解,則需要解模糊。
2.2 目標(biāo)定位解模糊
當(dāng)使用2.1節(jié)中的方法求解得到2個解時,需要根據(jù)目標(biāo)的方位角解模糊。
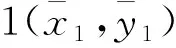
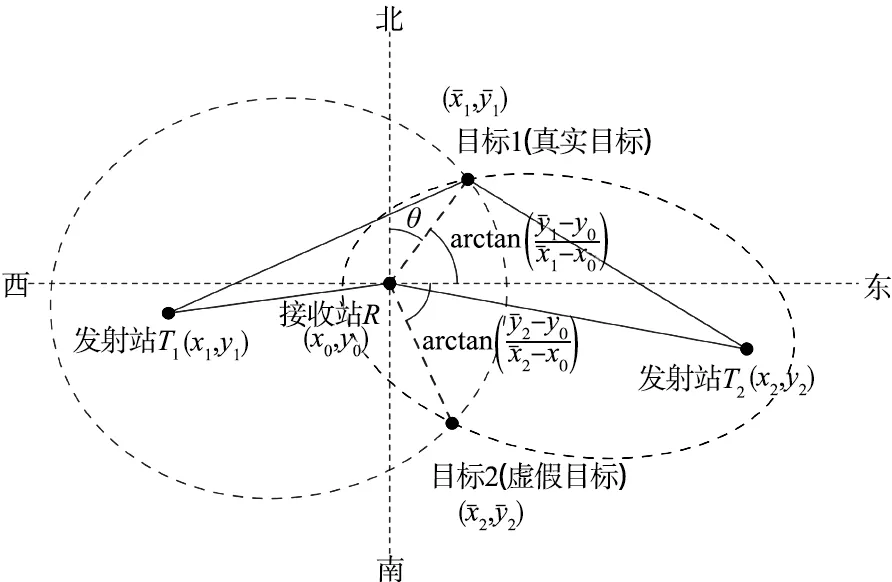
圖2 方位角解模糊原理Fig.2 Schematic diagram of azimuth ambiguity resolution
則目標(biāo)解模糊的計算方法為:
式中,Δθ為雷達允許的最大方位角誤差。通過判斷上式中哪一個不等式成立,可以知道哪個解是雷達感知到的真實目標(biāo)。
3 仿真實驗及結(jié)果
本文采用Matlab工具進行了橢圓定位算法仿真實驗,來驗證文中橢圓定位算法的有效性,并對算法定位精度進行了分析。
3.1 仿真實驗
仿真實驗設(shè)置為:在100 km×100 km的實驗區(qū)域內(nèi),隨機生成一條目標(biāo)運動軌跡。目標(biāo)從點(53 639,21 769)開始,沿運動軌跡勻速運動到點(89 626,96 997),目標(biāo)運動軌跡如圖 3所示。
圖3 模擬目標(biāo)運動軌跡Fig.3 Simulation of target trajectory
由第2節(jié)中的問題描述可知,接收站R可以獲得目標(biāo)到發(fā)射站T1,T2和目標(biāo)到接收站的距離之和r1+r0,r2+r0,以及目標(biāo)的方位角θ,設(shè)雷達方位角測量精度為1°(100 km),距離測量精度為200 m(100 km),且誤差滿足正態(tài)分布。
設(shè)接收站R位于坐標(biāo)(50 000,0)處,發(fā)射站T1位于坐標(biāo)(20 000,0)處、發(fā)射站T2位于坐標(biāo)(80 000,5 000)處,則橢圓定位算法的計算結(jié)果如圖 4所示。從圖4中可以看出,橢圓定位算法能夠較精確地定位出目標(biāo)位置。

圖4 橢圓定位算法目標(biāo)定位結(jié)果Fig.4 Target location result of ellipse location algorithm
3.2 誤差分析
式中,
圖5給出了橢圓定位算法誤差結(jié)果。通過實驗誤差進行分析可以得到,X軸的定位誤差為:328.892 6 m,Y軸的定位誤差為163.019 9 m。
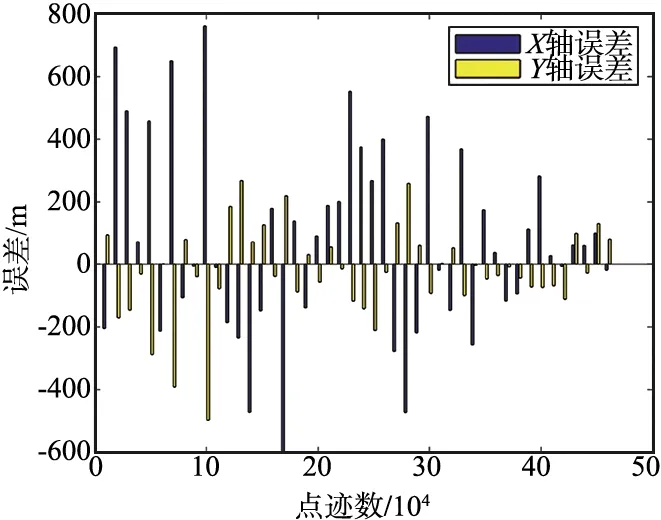
圖5 橢圓定位算法誤差結(jié)果Fig.5 Error result of ellipse location algorithm
3.3 定位精度分析
通過Matlab仿真實驗研究橢圓定位算法定位目標(biāo)誤差精度受發(fā)射站和接收站之間的距離的影響。設(shè)目標(biāo)運動軌跡和雷達參數(shù)滿足3.1節(jié)中的設(shè)定,且接收站R位于坐標(biāo)(50 000,0)處,分別計算發(fā)射站T1,T2部署于不同位置時的目標(biāo)定位誤差。實驗結(jié)果如圖 6所示。
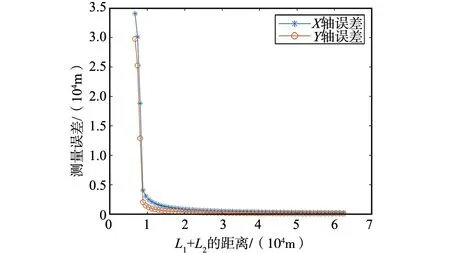
圖6 定位精度與雷達站距離之間的關(guān)系Fig.6 Relationship between location accuracy and distance of radar station
X軸為發(fā)射站T1,T2與接收站R之間的距離之和,即圖 1中的L1+L2,Y軸為根據(jù)3.2節(jié)方法計算得到的定位誤差。可以看出,橢圓定位算法的定位誤差隨L1+L2的增長呈指數(shù)減小。因此可以看出當(dāng)發(fā)射站和接收站之間的距離越遠(yuǎn)時,橢圓定位算法的定位精度越高。
4 結(jié)束語
橢圓定位算法是外輻射源雷達中常用的目標(biāo)測距方法,通過該算法可以實現(xiàn)目標(biāo)的高精度測距。本文中研究二維平面內(nèi)的橢圓定位算法及定位精度分析。通過Matlab仿真實驗發(fā)現(xiàn)橢圓定位算法可較精確地計算得到目標(biāo)的真實位置,且目標(biāo)定位精度與發(fā)射站和接收站之間的距離有關(guān)。通過實驗可知,定位誤差隨雷達站之間距離的增加呈指數(shù)減小,即雷達站之間的距離越遠(yuǎn),則定位精度越高。
