一種導航衛星EIRP及其穩定性自動化測試方法
2021-05-10 01:06:24沈冠浩龔文斌任前義
無線電工程 2021年4期
李 光,沈冠浩,龔文斌,任前義,沈 苑
(1.上海微小衛星工程中心,上海 201203;2.中國科學院 微小衛星創新研究院,上海 201203)
0 引言
導航落地信號功率在接收機接收范圍內是地面用戶進行導航定位的先決條件,其強度及穩定度直接關系到導航定位的精度。因此,導航衛星的等效全向輻射功率(Equivalent Isotropically Radiated Power,EIRP)及其穩定度是導航衛星的重要指標之一。導航衛星在出廠前需要進行EIRP及其穩定度的多次測量,以確保各階段衛星的功率符合指標要求[1-4]。
衛星在地面的EIRP測試分為有線測試和無線測試。由于受測試場限制,較難實現無線EIRP的測量要求,因此,有線EIRP的測量結果是各階段判斷衛星功率符合性的最重要依據。同時,由于不同仰角上的衛星信號在到達地面時有著近似等功率的要求,導航衛星的下行信號發射通道是多通道設計,結合衛星無線電導航業務下行天線陣列實現地球不同位置等功率設計要求[5-6]。
傳統的EIRP有線測量方法是每次僅發射一個頻點的信號,然后利用功率計逐個測量衛星的下行信號通道功率[7-8]。該方法每次僅能測量一個頻點、測試過程需要人工進行測試端口的更換,耗時長且存在安全隱患,而且無法進行EIRP的長時間連續性測試。因此,亟需根據導航衛星的特點,進行EIRP及其穩定度的自動化測試方法探索。
本文提出了一種利用矩陣開關、頻譜儀及配套的測試軟件進行EIRP及其穩定度的測量方法,可以實現導航衛星發射EIRP的快速、準確測量及EIRP穩定度的連續監測與測量。同時,測試軟件可以完成測試過程中的異常功率告警與異常頻譜記錄。
1 EIRP測量原理
EIRP為無線電發射機供給天線的功率與在給定方向上天線絕對增益的乘積。各方向具有相同單位增益的理想全向天線,通常作為無線通信系統的參考天線。EIRP定義為:EIRP=Pt×Gt,它表示同全向天線相比,可由發射機獲得的在最大天線增益方向上的發射功率。Pt表示發射機的發射功率,Gt表示發射天線的天線增益。在無線通信中,通常用來衡量干擾的強度,以及發射機發射強信號的能力。
導航衛星EIRP測量原理框圖如圖1所示。

圖1 EIRP測量原理Fig.1 The block diagram of EIRP measurement principle
測試前,首先將測試線纜1、大功率衰減器、測試線纜2的插損進行整段標定,假設整個鏈路的插損為LdB。衛星載荷開機后發送下行導航信號,利用功率計或者頻譜儀對每個通道的功率進行測量,假定測得信號功率為P1,P2,P3,…,Pn,則衛星發送下行信號的總功率為:
P=10×lg(P1+P2+P3+…+Pn),
(1)
式中,P1,P2,P3,…,Pn的單位為W,P的單位為dBW。則,衛星的EIRP為:
EIRP(dBW) =P(dBW)+G(dB) +L(dB) ,
(2)
式中,G為下行發射天線的增益。
2 系統構成
為克服傳統EIRP測試過程中需要人工進行測試端更換的問題,可以通過L頻段的矩陣開關實現任意一路信號的測試接入,并且該程控開關箱需具備網口遠程控制功能。為了可以進行下行導航信號的多頻點并行測試及EIRP測量結果的連續記錄,需采用頻譜儀進行下行信號的功率測量并且使用自動記錄軟件將測試結果自動保存。因此,EIRP自動測試系統由程控矩陣開關、頻譜儀、測試軟件、大功率衰減器和測試線纜等組成。
EIRP自動測試系統的組成及測試原理框圖如圖2所示。
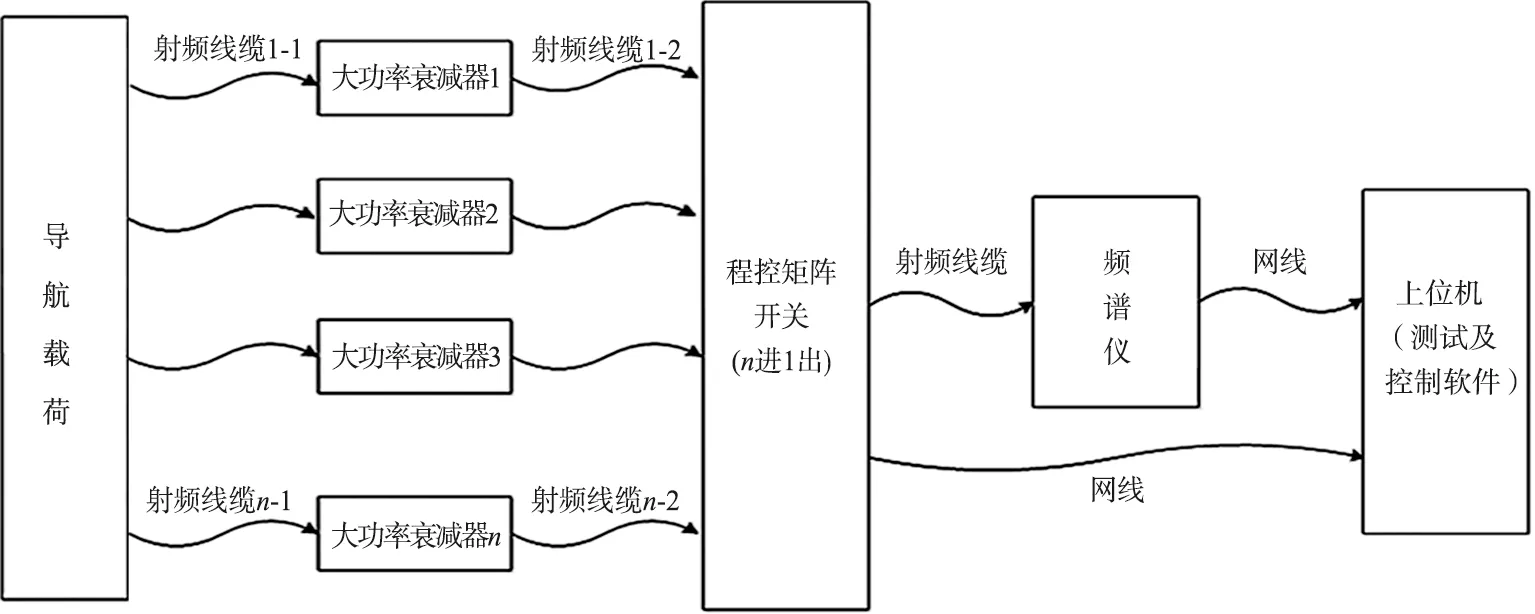
圖2 EIRP自動測試系統組成及原理Fig.2 Composition and principle block diagram of EIRP automatic test system
導航載荷通過射頻線纜與大功率衰減器及程控矩陣開關進行連接,程控矩陣開關進行1路測試信號的選通后通過射頻線纜送至頻譜儀。程控矩陣開關、頻譜儀通過網線連接至上位機。上位機中運行的測試及控制軟件通過網口對程控矩陣開關、頻譜儀進行控制。
2.1 程控矩陣開關設計
射頻微波開關矩陣能夠在測試儀器與被測器件之間自動路由射頻微波信號,它們可以提供一致的信號路徑,支持自動測試,通常還包括信號調理能力。在設計射頻開關系統時,要考慮一些關鍵電氣規范包括串擾(路徑隔離)、插入損耗、電壓駐波比和帶寬。可能影響開關系統性能的其他因素包括阻抗匹配、端接、功率傳輸、信號濾波器、相位畸變和布線。開關的使用不可避免地會降低測量系統的性能,因此需要著重考慮能顯著影響系統性能的關鍵參數[9]。
本文的EIRP自動化測試系統采用的射頻矩陣開關為15入1出(部分通道備用),其原理示意如圖3所示。
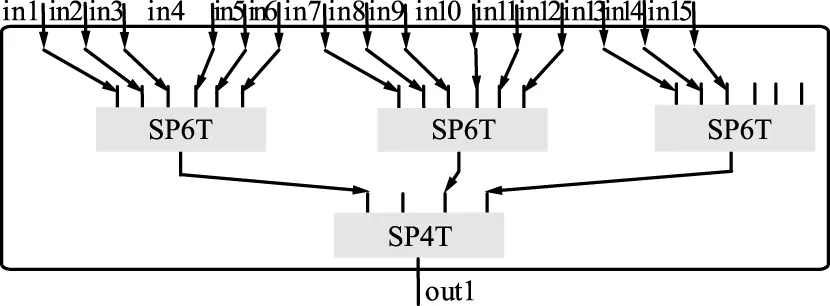
圖3 射頻矩陣開關原理示意Fig.3 Schematic diagram of RF matrix switch
程控矩陣開關的主要技術指標如下,可滿足導航信號的EIRP測量要求:輸入輸出:15×1;頻率范圍:DC-4 GHz;通道損耗:通道插入損耗小于3 dB;最大承受功率 1 W;端口駐波:小于1.4;通道間隔離度:大于90 dB。
2.2 測試及控制軟件設計
測試及控制軟件由矩陣開關控制模塊、頻譜儀控制模塊、數據分析模塊及人機交互界面組成。測試及控制軟件運行在Windows系統軟件的PC上,通過網口輸出控制命令、接收測試數據。測試及控制軟件的組成框圖如圖4所示。
矩陣開關控制模塊的主要作用是控制程控矩陣開關的選通,開關之間的選通是互斥的,測量時每次僅能選通一個通道,同時未選通的支路在矩陣開關內部有匹配負載,可以匹配未選通支路的輸出功率。頻譜儀控制模塊的主要作用是對頻譜儀的測量模式、測試頻點、測量帶寬和頻率分辨率等參數進行設置,并接收頻譜儀的測量結果。數據分析模塊對接收到的頻譜儀數據進行分析及存儲。同時,數據分析模塊在測試時將測量數據與用戶設定的閾值進行實時比較,如果超出閾值則控制頻譜儀進行頻譜的截圖及保存。
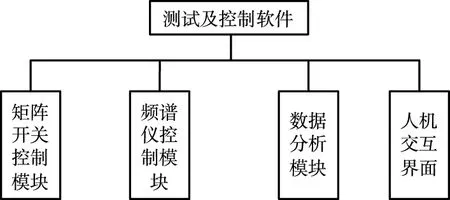
圖4 測試及控制軟件組成Fig.4 The block diagram of test and control software
測試系統的工作流程是:① 導航載荷的下行信號經過大功率衰減器進行信號衰減后,將測試信號經過射頻線纜送入程控矩陣開關;② 程控矩陣開關通過網線與上位機進行連接,上位機通過測試及控制軟件可控制矩陣開關的選通,從而將待測通道的信號選通至頻譜儀;③ 頻譜儀接收到測量信號后,利用通道功率測量功能進行帶內功率測量,然后將測量結果通過網口上傳至上位機的測試及控制軟件;④ 測試及控制軟件將測量結果進行實時記錄與保存,同時,也可以對比測量結果和判斷閾值,如果超出閾值則將測試屏幕上的超出數據標紅并將異常時刻的頻譜圖進行保存。測試的流程如圖5所示。
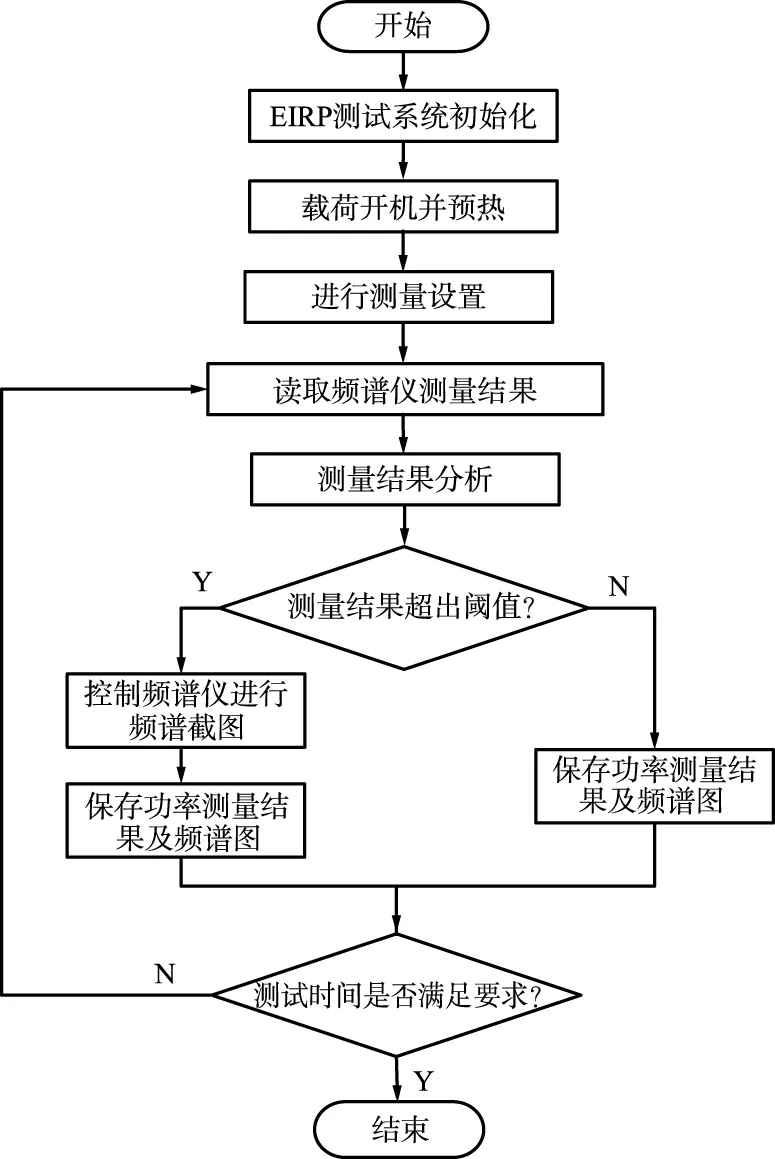
圖5 EIRP自動化測試流程Fig.5 EIRP automated test flow chart
3 測試系統運用
本文所設計的EIRP自動化測試系統已經應用于北斗三號系統導航衛星的測試。該系統,具備了EIRP三頻并行測量能力、EIRP自動記錄能力、功率異常告警能力、異常頻譜保存能力,將EIRP的測試效率提升了70%以上,大大提升了該測試項目的測試效率及測試安全性。
EIRP測試系統的交互界面如圖6所示。
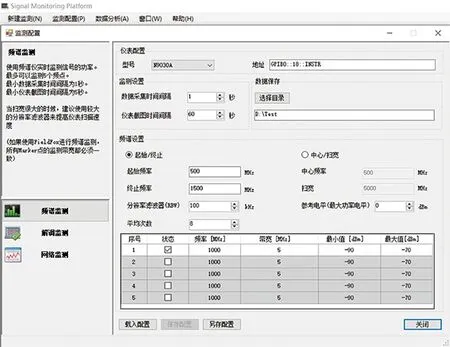
圖6 EIRP測試系統的交互界面Fig.6 Interface of EIRP test system
EIRP測試系統的測量結果通過表格和圖片形式進行自動保存。其中,表格保存結果中包括時間、中心頻點、每秒測量結果等,具體如圖7所示。
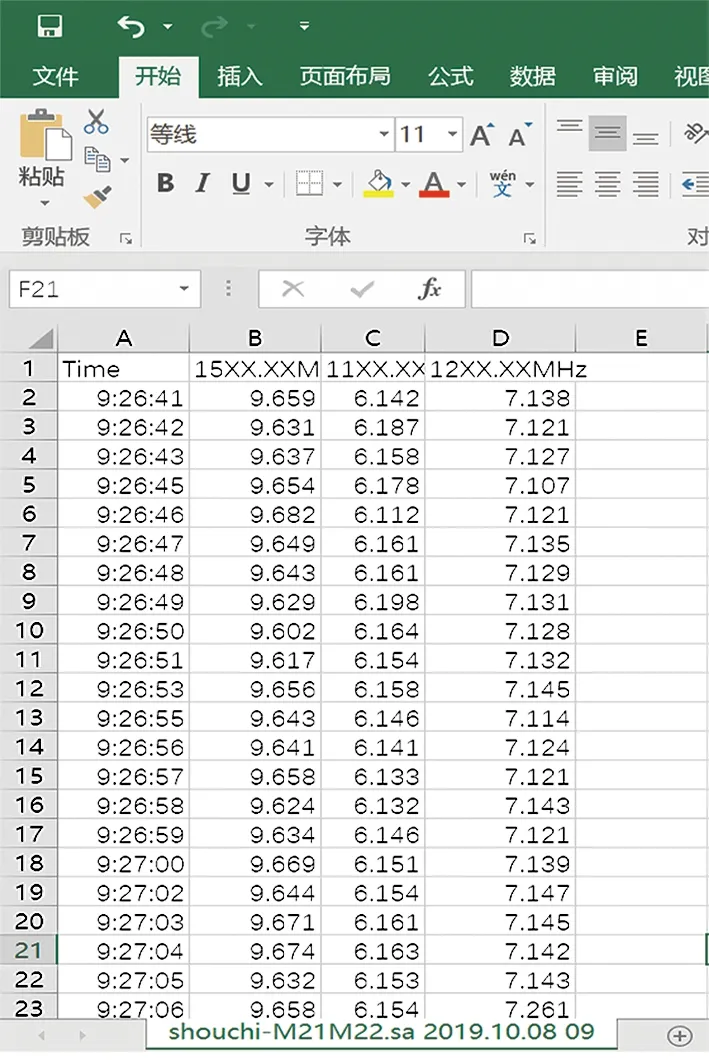
圖7 EIRP測試結果Fig.7 Schematic diagram of EIRP test results
圖片結果的保存分為設定時間保存和超過閾值時的異常頻譜保存。其中,設定時間保存可以根據用戶的需求進行設置,每隔特定時間則進行自動保存。異常頻譜保存是當EIRP測量結果超出閾值時,測量系統自動控制頻譜儀進行頻譜的截圖及保存。EIRP頻譜測量結果如圖8所示。
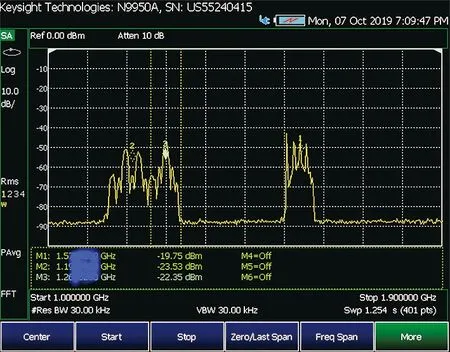
圖8 頻域自動存儲圖Fig.8 Automatic storage graph in frequency domain
4 結束語
導航衛星EIRP及其穩定性自動化測量系統由程控矩陣開關、頻譜儀和測試及控制軟件組成,可以實現多頻點的EIRP測量結果的自動、快速和連續測量保存,同時實現了異常的自動告警和異常頻譜的自動保存,克服了傳統測量方法效率低、無法進行EIRP穩定性測量等問題。
該系統已經成功應用于北斗三號系統導航衛星的EIRP測試,將該測試項目的效率提高了70%以上,取得了較好的應用價值。該系統的測試方法不僅可以應用導航衛星,也適用于其他具有多通道下行信號的EIRP測量的場景,具有一定的應用推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
