一種牽引變電所智能巡檢系統(tǒng)的開發(fā)與應用
2021-05-10 07:44:56李育冰
電氣化鐵道 2021年2期
李育冰
0 引言
鐵路發(fā)展已成為帶動地方經(jīng)濟發(fā)展的重要渠道。近年來,鐵路發(fā)展迅速,牽引變電所作為鐵路供電系統(tǒng)的核心,為了確保其供電的可靠性和穩(wěn)定性,日常檢測、運維顯得尤為重要。變電所巡檢是保障供電系統(tǒng)穩(wěn)定運行的重要工作。傳統(tǒng)變電所巡檢通常采用人工巡視、手工記錄的作業(yè)模式,存在諸多難點,主要體現(xiàn)在受限制條件多、巡檢點位分散、手段單一、人為因素影響、巡檢效率低等。
隨著科技的不斷進步、體制的不斷改革以及無人值守的普及,牽引變電所自動化程度也在不斷提高,牽引變電所巡檢工作逐漸趨于無人化或少人化。2018年年底,原中國鐵路總公司《關(guān)于發(fā)布〈牽引供變電所實施無人值班值守工作的指導意見〉的通知》(工電函[2018]101號)明確了《牽引變電所輔助監(jiān)控系統(tǒng)暫行技術(shù)條件》,強調(diào)了牽引變電所智能巡檢系統(tǒng)是實現(xiàn)牽引供變電所無人值班值守的必要硬件設(shè)施。
為了實現(xiàn)鐵總關(guān)于“推進‘機器人’+無人值守/值班牽引變電所建設(shè),推廣應用在線監(jiān)測、狀態(tài)診斷、智能巡檢系統(tǒng),打造安全、高效、大數(shù)據(jù)化的少人值守運維管理系統(tǒng)”的落地應用,綜合利用視頻識別、多傳感器綜合探測、綜合導航和精確對準、故障精確診斷等多項技術(shù),開發(fā)了一種牽引變電所智能巡檢系統(tǒng)。該系統(tǒng)主要通過智能巡檢機器人監(jiān)測牽引變電所內(nèi)各種一次供電設(shè)備運行狀態(tài),實現(xiàn)變電所無人值守和設(shè)備運行遠程維護。
1 系統(tǒng)設(shè)計
1.1 系統(tǒng)總體架構(gòu)
牽引變電所智能巡檢系統(tǒng)基本組成包括:巡檢機器人子系統(tǒng),視頻監(jiān)控子系統(tǒng),機器人充電子系統(tǒng),通信網(wǎng)絡子系統(tǒng),平臺管理子系統(tǒng)。
1.2 子系統(tǒng)設(shè)計
1.2.1 巡檢機器人子系統(tǒng)
巡檢機器人子系統(tǒng)包含了底盤模塊、供電模塊、云臺模塊、氣體檢測傳感器模塊、溫濕度檢測模塊、語音對講模塊,如圖1所示。
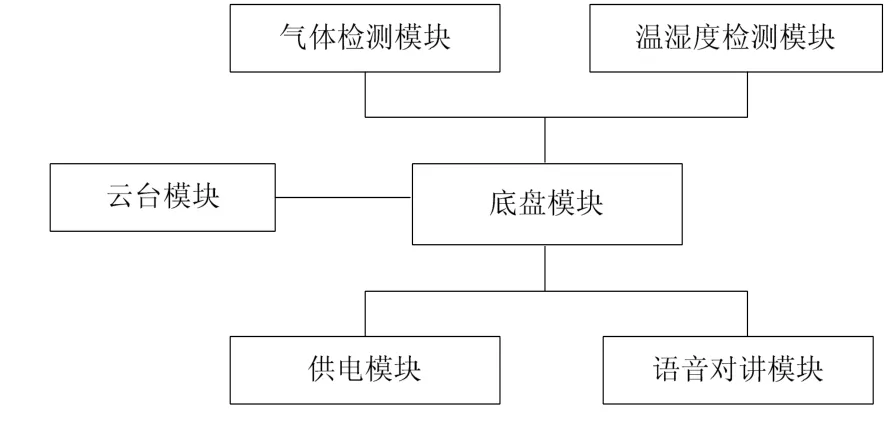
圖1 巡檢機器人子系統(tǒng)
巡檢機器人子系統(tǒng)底盤模塊具備高運動能力,采用四輪獨立驅(qū)動的底盤,支持原地轉(zhuǎn)彎,能適應多種路況;激光雷達導航可實現(xiàn)全所覆蓋,巡檢作業(yè)可跨室內(nèi)外區(qū)域,在復雜環(huán)境中實現(xiàn)檢測無死角;底盤驅(qū)動模塊具有自身短路、斷路、過流、過壓、欠壓、過溫檢測功能和實時通信監(jiān)測功能,發(fā)生異常時可上傳報警信息并自動停車。
供電模塊采用充電電池,電池裝置有信號觸頭和正負極觸頭,可實現(xiàn)機器人自主充電。
云臺模塊搭載了高清攝像機以及紅外熱成像儀,采用全向型云臺,支持水平方向360°和垂直方向90°旋轉(zhuǎn),可以控制高清攝像頭與紅外熱像儀在巡檢過程中的拍攝角度。云臺配有補光燈和雨刷,以支持夜間和雨天的巡檢。
氣體檢測傳感器模塊采用紅外吸收檢測原理的氣體傳感器模組,用于測量所內(nèi)的SF6氣體,還可檢測氧氣、一氧化碳、甲烷、硫化氫等氣體。
溫濕度檢測模塊包括溫濕度傳感器,實時檢測牽引變電所室內(nèi)和管廊內(nèi)部溫濕度,并具有預防傳感器結(jié)露功能。
語音對講模塊包括拾音器和對講機,用于內(nèi)部人員與后臺人員通話指導。
1.2.2 機器人充電子系統(tǒng)
帶電檢測機器人在變電所長期值守、完全自治,必須能快速高效、安全可靠地自主充電,因此需要設(shè)計有效實用的自主充電樁。系統(tǒng)采用電極對接的有線充電方式進行充電,通過在充電樁附近鋪設(shè)磁軌,或利用紅外對射模塊引導機器人自行導航至充電樁處。充電時機器人位置和充電臂位置均可調(diào)整,以便充電插頭與充電座自動對接。另外,在充電樁上還設(shè)計有誤差容忍和自主糾錯機構(gòu),可以滿足機器人在小范圍偏差內(nèi)仍能與充電裝置對接成功。
1.2.3 視頻監(jiān)控子系統(tǒng)
視頻監(jiān)控子系統(tǒng)完成監(jiān)控目標的視頻信息采集和傳輸,包括室外高速球型攝像機以及硬盤錄像機,通過對室外高速球機的預置位設(shè)置,實現(xiàn)視頻監(jiān)控巡視功能,并在牽引變電所場坪一次設(shè)備動作時自動控制攝像機和云臺的自由轉(zhuǎn)動、變焦,完成監(jiān)控的快速聚焦定位,拾取現(xiàn)場視頻及圖片。系統(tǒng)具有對圖像的切換、自由存放、硬盤錄像、回放及逐幀搜索畫面功能。視頻監(jiān)控子系統(tǒng)還具有報警聯(lián)動視頻功能,各個子系統(tǒng)的告警和狀態(tài)變化都可以作為視頻聯(lián)動的條件,并能進行邏輯組合,一個觸發(fā)條件可并發(fā)2臺以上攝像機聯(lián)動。
1.2.4 通信網(wǎng)絡子系統(tǒng)
通信網(wǎng)絡子系統(tǒng)由站端無線網(wǎng)絡及有線網(wǎng)絡組成,主要實現(xiàn)信息交互、通道切換、系統(tǒng)對時等功能。無線網(wǎng)絡主要由部署于牽引變電所房屋頂部的無線AP實現(xiàn)場坪全覆蓋,完成巡檢機器人子系統(tǒng)與平臺管理子系統(tǒng)間的實時通信。站端有線網(wǎng)絡實現(xiàn)視頻監(jiān)控子系統(tǒng)與平臺管理子系統(tǒng)間的實時通信。信息交互內(nèi)容包括機器人狀態(tài)信息、檢測設(shè)備信息、環(huán)境信息、監(jiān)控后臺控制指令信息及各類預警告警信息。通信網(wǎng)絡子系統(tǒng)在通信中斷等異常情況下將發(fā)出告警信息,并能保證圖像、語音等各類數(shù)據(jù)不丟失,在通信恢復后可自動續(xù)傳。
1.2.5 平臺管理子系統(tǒng)
平臺管理子系統(tǒng)采用分布式架構(gòu),實現(xiàn)機器人與固定監(jiān)控的數(shù)據(jù)信息深度融合,包括站端子站平臺以及上級主站平臺。平臺管理子系統(tǒng)架構(gòu)如圖2所示。
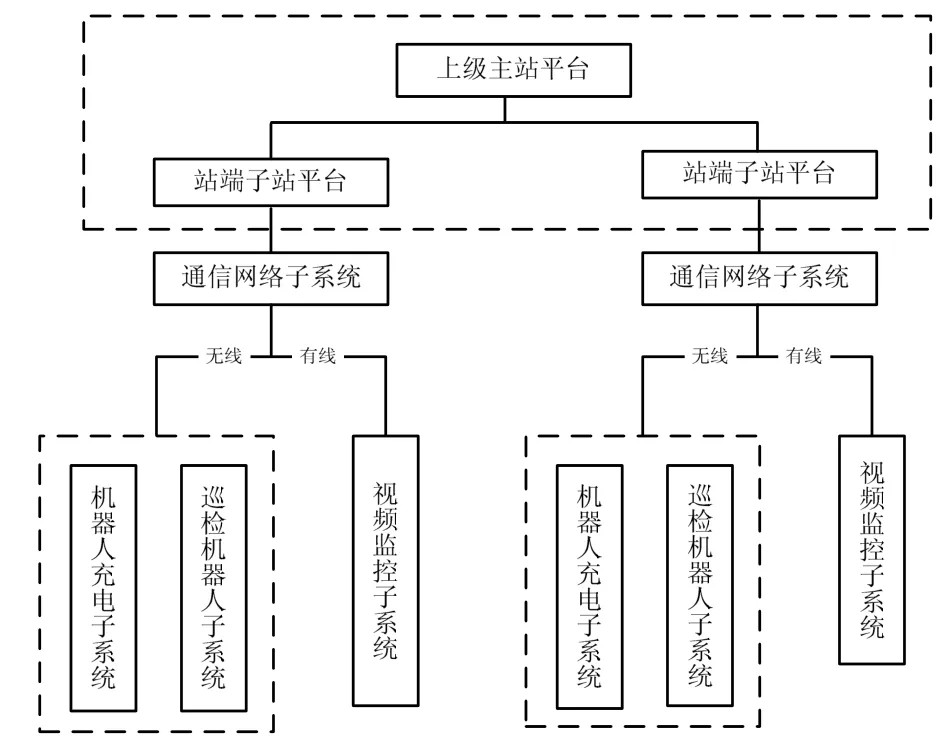
圖2 平臺管理子系統(tǒng)架構(gòu)
站端子站平臺主要完成對巡檢機器人子系統(tǒng)以及視頻監(jiān)控子系統(tǒng)的管控與分析工作,包括巡檢任務的派發(fā)、遠程遙控作業(yè)以及圖像智能分析等,同時可實現(xiàn)在場坪一次設(shè)備動作時向視頻監(jiān)控子系統(tǒng)發(fā)出巡視指令,完成快速定位聚焦,拾取現(xiàn)場視頻及圖片。上級主站平臺主要完成對站端一個或多個站端子站平臺的集中管控與大數(shù)據(jù)分析。一套主站平臺可完成對多個站端子站平臺的監(jiān)視管理工作,解決了上級平臺無法集中管控現(xiàn)場巡檢情況的難題。平臺借助標準接口技術(shù),可與既有系統(tǒng)進行數(shù)據(jù)對接,從而實現(xiàn)巡檢機器人子系統(tǒng)與視頻監(jiān)控子系統(tǒng)的高效協(xié)同聯(lián)動,彼此監(jiān)管、優(yōu)勢互補。
2 系統(tǒng)實現(xiàn)
2.1 智能巡檢管理平臺
智能巡檢管理平臺軟件基于NET架構(gòu),采用Microsoft Visual Studio的C#語言開發(fā),可以在Windows的各個版本操作系統(tǒng)跨平臺運行。結(jié)合先進的人工智能技術(shù)、現(xiàn)場實時精準采集的數(shù)據(jù)以及豐富的設(shè)備檢測經(jīng)驗,強大的后臺軟件能對設(shè)備運行狀態(tài)做出準確的判斷,并能通過趨勢分析提前發(fā)現(xiàn)事故先兆,實現(xiàn)預測性維護。軟件功能模塊包括實時監(jiān)控、任務管理、遠程遙控、歷史查詢、報警管理、數(shù)據(jù)統(tǒng)計分析等模塊。
(1)實時監(jiān)控模塊用于查看機器人運行過程中的任務信息、圖像信息、現(xiàn)場環(huán)境信息和機器人本體狀態(tài)、電池狀態(tài)和車體行進信息等。
(2)任務管理模塊分為例行巡檢規(guī)劃、特巡任務規(guī)劃和遙控巡檢3種模式,不同任務模式間可隨時切換。例行巡檢規(guī)劃可提前生成若干巡檢任務,執(zhí)行每天定期巡檢;特巡任務規(guī)劃可在特殊情況下實時生成臨時巡檢任務;遙控巡檢通過局端遠程控制機器人巡檢,獲取變電所內(nèi)設(shè)備實時信息。
(3)遠程遙控模塊可通過手柄實時遙控調(diào)整云臺方位和俯仰角,控制行進方向和車體速度,并遙控高清攝像機和紅外檢測儀聚焦檢測目標,完成規(guī)定任務。
(4)報警管理模塊實時獲取并顯示報警信息,生成報警報告,報警統(tǒng)計分析和報警預告等。
(5)歷史查詢和數(shù)據(jù)分析模塊用于對機器人巡檢獲得的音視頻數(shù)據(jù)、圖像數(shù)據(jù)、設(shè)備狀態(tài)、表計讀數(shù)等信息的集中存儲、分析診斷和分類查詢。
2.2 智能巡檢機器人
智能巡檢機器人是智能巡檢系統(tǒng)的核心,由巡檢機器人本體、本地監(jiān)控后臺、遠程集控后臺、機器人充電室、導航設(shè)施及其他輔助設(shè)施組成。自主移動平臺上搭載可見光攝像機、紅外熱像儀和聲音采集器等檢測設(shè)備。智能巡檢機器人如圖3所示。
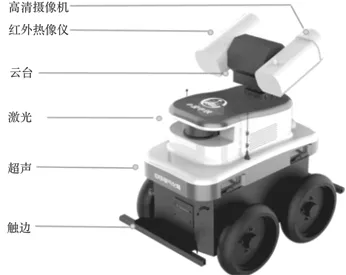
圖3 智能巡檢機器人
智能巡檢機器人在導航技術(shù)和運動四驅(qū)底盤基礎(chǔ)上集成了圖像識別、自動控制等多種技術(shù),可以自主或遙控的方式在不斷電的情況下完成對室內(nèi)(外)高壓設(shè)備進行紅外溫度監(jiān)測和儀表油位的圖像識別等任務,具有遙控巡檢、視頻監(jiān)控、噪聲監(jiān)測、氣體泄漏檢測、紅外測溫、故障報警等功能。智能巡檢機器人基本性能參數(shù)如表1所示。
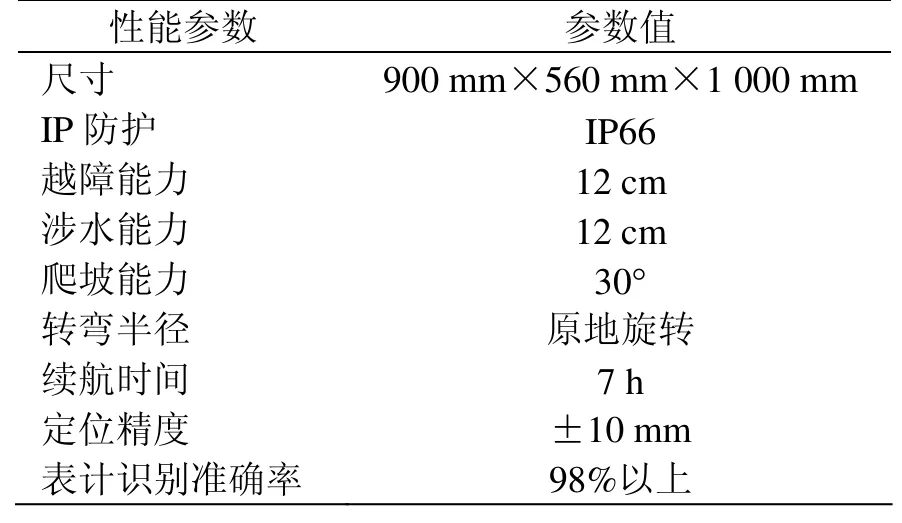
表1 智能巡檢機器人性能參數(shù)
2.3 視頻監(jiān)控子系統(tǒng)
視頻監(jiān)控子系統(tǒng)主要設(shè)備包括網(wǎng)絡視頻錄像機NVR及高清攝像機。高清攝像機主要布置在需要進行視頻監(jiān)控的場所,如二次設(shè)備室、高壓室、室外變壓器側(cè)、饋線側(cè)等。攝像機一般選用高清高速球機(性能指標見表2)。攝像機通過同軸電纜連接至智能巡檢系統(tǒng)機柜的NVR,NVR通過局域網(wǎng)與智能巡檢系統(tǒng)后臺管理機相連,進行視頻監(jiān)控和聯(lián)動操作等。智能巡檢管理平臺從NVR中讀取攝像機列表,進行實時圖像顯示、錄像管理、攝像機參數(shù)設(shè)置。當有告警或主要監(jiān)控設(shè)備發(fā)生狀態(tài)變化時,觸發(fā)攝像機聯(lián)動,軟件系統(tǒng)發(fā)送調(diào)用預置位的命令給NVR,采集現(xiàn)場的實時監(jiān)控視頻和圖片。
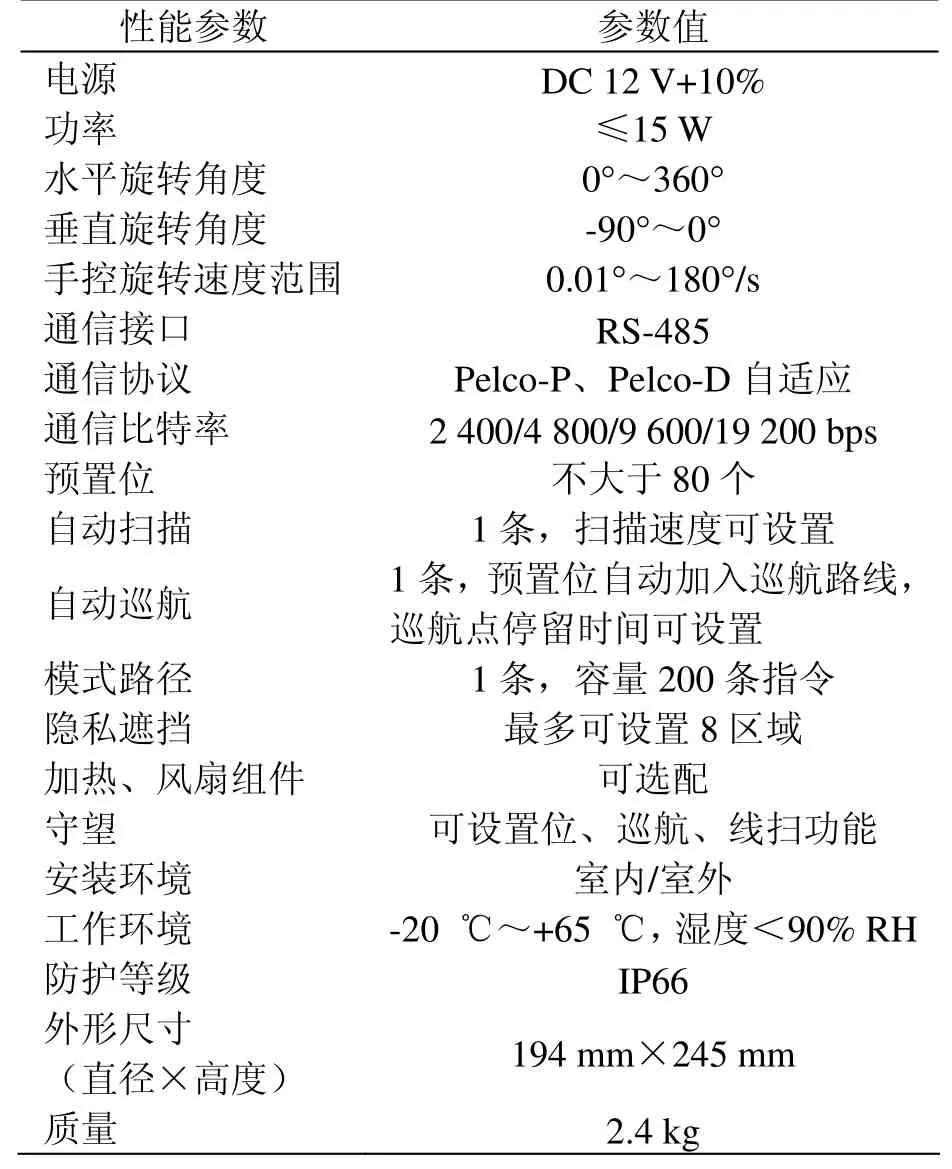
表2 高速球機性能參數(shù)
2.4 通信網(wǎng)絡子系統(tǒng)
通信網(wǎng)絡子系統(tǒng)分為3層,分別為監(jiān)控層、通信層和終端層。監(jiān)控層是智能巡檢系統(tǒng)管理平臺中的三維實景監(jiān)控平臺;通信層由網(wǎng)絡交換機等設(shè)備組成,負責建立監(jiān)控層與智能終端層的網(wǎng)絡通道;終端層包括輪式智能巡檢機器人、紅外熱成像儀和固定監(jiān)測點等。終端層機器人的巡檢信息數(shù)據(jù)通過通信層上傳至工作站的三維實景監(jiān)控平臺。最終實現(xiàn)的通信網(wǎng)絡子系統(tǒng)結(jié)構(gòu)如圖4所示。
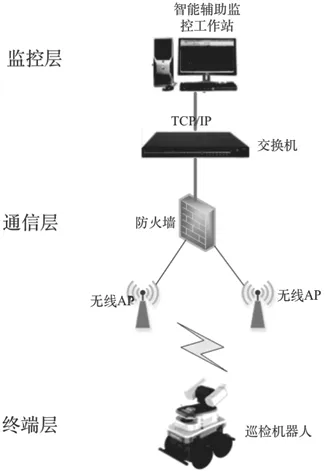
圖4 通信網(wǎng)絡子系統(tǒng)
2.5 機器人充電子系統(tǒng)
機器人充電房由充電柜、充電座、無線通信設(shè)備和自動卷簾門組成,采用220 V交流供電。機器人工作狀態(tài)包括巡檢、充電、空閑3種。收到巡檢命令后,機器人首先檢查電池電量是否充足,充足即進入巡檢狀態(tài),按任務規(guī)劃進行設(shè)備巡檢,否則拒絕執(zhí)行并報警。巡檢完成后,機器人返回充電房。機器人在巡檢中實時檢測電池電量,若電量不足則立即返回充電房充電,充電過程完全自動化。
3 系統(tǒng)功能
系統(tǒng)最終實現(xiàn)了以下核心功能:
(1)數(shù)據(jù)全面采集。系統(tǒng)可實現(xiàn)對包括紅外測溫、儀表讀數(shù)、刀閘變位、開關(guān)及指示燈狀態(tài)、噪聲監(jiān)測數(shù)據(jù)、微氣象數(shù)據(jù)及高清視頻的全面采集,還能接入現(xiàn)場第三方系統(tǒng)數(shù)據(jù)。
(2)實時傳輸。系統(tǒng)可實時上傳數(shù)據(jù),進行實時語音對講,實時下達巡檢指令。
(3)智能識別。系統(tǒng)可實現(xiàn)表計、開關(guān)狀態(tài)、設(shè)備溫度、SCADA遠動信息、火災的智能識別。
(4)高清顯示。系統(tǒng)實現(xiàn)了對微氣象、現(xiàn)場視頻、設(shè)備狀態(tài)、運行狀態(tài)、分析結(jié)果、操作日志等信息的高清顯示。
(5)預警研判。系統(tǒng)實現(xiàn)了對采集數(shù)據(jù)進行分析統(tǒng)計,作出趨勢研判和預警提示等功能。
(6)遠程控制。系統(tǒng)實現(xiàn)了遠程遙控行進、遠控SCADA確認、自動聯(lián)動卷簾門、遠程雙向語音對講功能。
4 系統(tǒng)應用情況
該智能巡檢系統(tǒng)在京張高鐵小白楊220 kV牽引變電所投入使用,智能機器人可按預設(shè)程序?qū)υ撟冸娝?70臺設(shè)備和現(xiàn)場環(huán)境進行自動巡檢巡查,也可遠程控制智能機器人和視頻監(jiān)控設(shè)備完成設(shè)備綜合巡檢,一次巡檢用時2 h。系統(tǒng)能實現(xiàn)數(shù)據(jù)自動采集,巡檢覆蓋率達到100%,識別精度均達到98%以上。
通過智能巡檢機器人實現(xiàn)智能化巡檢,可及時發(fā)現(xiàn)設(shè)備異常現(xiàn)象,規(guī)避設(shè)備運行隱患,提高工作效率和巡視質(zhì)量,使巡檢更加及時高效。另外,當維護人員現(xiàn)場進行設(shè)備保養(yǎng)和設(shè)備維修時,可觸發(fā)機器人的作業(yè)保障功能,保障工作人員的作業(yè)環(huán)境安全,同時實現(xiàn)作業(yè)過程監(jiān)督。
當智能巡檢系統(tǒng)接收到站端設(shè)備故障信號時,可觸發(fā)機器人進行故障節(jié)點環(huán)繞巡視,幫助遠程專家快速鎖定問題根源,在最短時間內(nèi)完成應對策略。當現(xiàn)場設(shè)備出現(xiàn)故障時,技術(shù)專家可在段/局級遠程對現(xiàn)場操作人員進行音視頻指導,確保關(guān)鍵操作正確無誤。巡檢機器人能夠代替人工完成變電所檢測中的急、難、險、重和重復性工作,減輕工作人員的工作負擔。
5 結(jié)語
牽引變電所智能巡檢系統(tǒng)以智能巡檢機器人為核心,具有遙控巡檢、視頻監(jiān)控、噪聲監(jiān)測、氣體泄漏檢測、紅外測溫、故障報警等功能。該系統(tǒng)用于牽引變電所設(shè)備和環(huán)境的巡檢巡查及實時監(jiān)控管理,成功解決了傳統(tǒng)巡檢方式受限制條件多、巡檢點位分散、手段單一、人為因素影響、巡檢效率低等問題,提高了牽引變電所設(shè)備運行的可靠性和穩(wěn)定性,為高鐵運行安全提供了保障,具有良好的推廣應用前景。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45