主動吸收式造波技術的發展及應用
2021-05-12 12:49:26白志剛汪曉宇余海濤
水道港口 2021年1期
白志剛,汪曉宇,余海濤,吳 哲
(1.天津大學 水利工程仿真與安全國家重點實驗室,天津 300072; 2.天津大學 建筑工程學院,天津 300072)
在港口工程、水利工程、船舶與海洋工程等領域的研究中,常采用物理模型實驗的方法來解決實際的工程問題, 例如在水槽或水池等設施中按照重力相似準則,以一定的比尺模擬實際工況中的波浪、流、風及地形等自然因素。目前,世界研究機構建設了高性能波浪水槽或水池,例如荷蘭MARIN水池[1],英國愛丁堡大學FloWave海洋能研究水池[2]、荷蘭代爾夫特大學Delta水槽[3]、日本NMRI圓形深海水池[4],國內例如中國上海交通大學海洋深水池[5]、交通運輸部天津水運工程科學研究院大比尺波浪水槽[6-7]等。
1 概述
傳統的實驗室造波技術起源于1929年,Havelock[8]推導了實驗室造波理論,而后Biesel[9]、Ursell[10]等實現了實驗室物理造波技術,Sch?ffer[11]將造波理論拓展到二階,建立了完整造波理論體系,并進行了實驗驗證。值得注意的是,與廣闊的海洋環境不同,波浪水槽或水池受到長度和寬度的限制,造波板產生的行進波會與水池邊壁和結構物產生反射波,反射波再返回至造波板處被二次推出,形成二次反射波,嚴重影響水池中的波浪場。為獲得高質量模擬波浪,必須解決造波過程中的二次反射問題。實驗室常采用的解決方法包括被動消波技術和主動吸收技術。常用的被動消波裝置包括斜坡、盲溝、孔板等型式[12-14],可以有效地吸收掉傳播到水槽末端或池壁的波浪。
但被動消波技術存在著占用空間大、無法吸收池中結構物前的反射波等局限性,故基于波浪信息反饋的主動吸收式造波技術被提出和采用。主動吸收式造波技術的基本原理為:傳感器測量波浪的信息并傳輸到控制器中,控制器將波浪信息轉化為造波板的運動信號,造波板進行運動吸收反射波浪。整個過程具有實時性。
主動吸收式造波技術有如下功能:
(1)主動吸收系統布置在末端時,吸收行進波,提供穩定的行進波波浪場;節省被動消波裝置占用的大幅空間,提高吸收效率,如圖1-a所示。用于泥沙實驗[15]、海底管線沖刷實驗等[16];
(2)主動吸收系統附加在造波端時,造波板兼具造波和吸收的功能,吸收結構物的一次反射波,保證結構物前的波浪特征及受力特性穩定,如圖1-b所示。適用于海工、港工結構實驗及船舶實驗等[17-18];
(3)有效避免水池或水槽中共振現象的產生,延長實驗時間;
(4)在實驗結束時,吸收水槽或水池中振蕩的余波,極大縮短兩次實驗間的靜水時間,提高實驗效率;
(5)避免二階偽諧波的產生[19]。

1-a 主動吸收系統布置在末端示意圖1-b 主動吸收系統附加在造波端示意圖圖1 主動吸收系統布置示意圖Fig.1 Arrangement of active absorption system
以波浪反饋信號的類型為分類標準,主動吸收式造波技術分為基于板上波高信號、板前波高信號和力或力矩信號的3種代表性技術,各種技術所基于的理論及其時域實現方式也有所不同。本文在對3種主動吸收式造波技術綜述的基礎上,總結對比各項技術的優缺點,對主動吸收式造波技術的核心與難點進行了分析討論,最后結合國內外發展現狀對技術的發展趨勢進行了展望,并為今后我國應采取的對策提出建議。
2 主動吸收式造波技術
2.1 基于板上波高信號反饋的主動吸收式造波技術
以板上實時波高信號作為反饋信號的主動吸收式造波技術發展較早,研究也更加成熟。按照技術水平的發展,造波能力從規則波到不規則波,從線性波到非線性波,從二維水槽造波到三維水池造波不斷提高。
針對二維線性工況,Hirakuchi等[20-21]推導了吸收模式下帶有衰減模態的規則波的造波板運動控制方程。針對不規則波情況,認為波浪是由無限個頻率的組成波疊加而成,采用數學近似的方法,即用近似的常數代替涉及無窮個組成波的未知參數。Hirakuchi等在Kawaguchi[22]的基礎上,設計了適用于規則波與不規則波的主動吸收式造波系統。該系統采用二維推板式造波機,兼具造波與吸收的功能,波浪的波高反饋信息通過固定在造波板上的浪高儀來獲取,并通過一套完整的模擬控制回路實現造波板速度控制。實驗對比了傳統造波與主動吸收式造波的效果,在進行不規則波造波實驗時,還對比了水槽末端分別布置防波堤模型和消波灘時吸收的效果。結果表明,主動吸收式造波情況下,譜密度分布更接近理論值。該技術被發展為 “時域控制法”,從時域的角度進行吸收的研究,極大地簡化了算法設計。
Sch?ffer等[23]建立了基于板上波高反饋的適用于規則波和不規則波的主動吸收理論,推導了造波板的運動Xa與反饋波高A0之間的頻域傳遞函數F
(1)
式中:c0、cj為水動力傳遞系數;AI為目標行進波高。在算法的時域實現過程中,采用最佳逼近方法設計了無限脈沖響應(IIR)濾波器,在較寬的頻率范圍內擬合傳遞函數。并在濾波器設計過程中考慮造波板的零頻響應和信號延遲的問題等。實驗驗證工作在DHI水池中進行,驗證了規則波與不規則波的主動吸收效果,實驗結果與理論值較為吻合。該方法稱為“頻域濾波器方法”。
李宏偉[24-25]將“時域控制方程法”和“頻域濾波器方法”統一,從公式推導過程中解釋了兩種理論的本質是一致的。在算法實現過程中,兩種方法對于規則波的吸收效果理論上也是一致的。

(2)

(3)

主動吸收式造波技術從二維水槽向三維水池拓展時,受到多種因素的影響和制約,包括斜向波浪的入射角度,非傳播模態項的分布規律,相鄰造波板之間的干擾等,其中,最主要的影響因素為波浪的方向角問題。在向三維拓展的嘗試中,最初采用的方法為直接將二維的控制系統應用到三維造波機的每塊獨立的造波板上,并以提前預設的方法解決方向角問題。上述方法被稱為準三維主動吸收技術,具有代表性的如Yoshikawa和Chin[27]、Hirakuchi[21]等。他們的實驗結果表明,準三維主動吸收技術在水池實驗中是適用的,在小角度情況下,尤其是反射波垂直于造波機的情況下,吸收效果十分顯著。
面對更復雜的水池工況,如大角度斜向波或變角度波浪情況,準三維主動吸收技術具有不適用性,需要對反射波的角度進行實時探測,并對各造波板進行耦合控制,這種方法被稱為全三維主動吸收技術。Ito[28]等基于板上波高傳感器的反饋信號,設計了三維主動吸收式造波系統。其設計核心在于利用系統探測并計算實測信號與預設值的差異,修正差異從而實現主動吸收式造波。推導出主動吸收模式下造波板速度與反饋波高之間的傳遞函數H(ω,θ),并將傳遞函數H(ω,θ)在主頻率ω0和主方向角θ0上進行泰勒展開。
(4)
式中:頻率的偏差值△ω和方向角的偏差值△θ成為自變量。可通過反射波波高及其二階導數的形式表達出來。關于主頻率和主方向角的選取,主頻率選擇為規則波的角頻率及不規則波的譜峰頻率,主方向角的選取較為復雜。對于復雜反射模型,方向難以確定,對于浮體模型,方向角會隨時間發生變化,采用當前以及過去的波高數據對時間和空間的偏導的方法確定主方向角。
Sch?ffer和Skourup[29-31]在Sch?ffer[23]的基礎上提出了一種適用于三維主動吸收的新方法。推導得三維主動吸收傳遞函數,算法實現過程依靠二維濾波器方法,逼近幅值和相位響應的同時,對波浪方向角進行逼近,使該濾波器的系統響應函數盡可能的逼近三維主動吸收傳遞函數。實驗結果給出了準三維和全三維主動吸收系統在各角度下的規則波的吸收率對比,結果表明,全三維主動吸收系統0°~60°角度范圍內,反射率均在10%以下。

圖2 布置在板上的波高傳感器組成的線性陣列(Oscar Cruz Castro)Fig.2 Uniform linear array formed with wave height meters attached to the paddle front(Oscar Cruz Castro)
Oscar Cruz Castro[32]針對方向角問題從信號學角度提出了新的解決方案,基于信號學的改進MUSIC算法,采用直接數據域適應性聲源定位(DDDA)獲得偽協方差矩陣。如圖2傳感器陣列示意圖,有N個波高傳感器成列分布,探測多個方向上的多個窄帶信號。根據方向響應粗略估計入射角度的范圍,再通過解算矩陣求確切的方向譜。實驗驗證了該方向譜估計方法的有效性。在設定方向為30°的情況下,落在25°~35°結果范圍內的有效樣本占比52.2%,若將結果范圍擴大,落在20°~40°結果范圍內的有效樣本占比66.3%。
國內在主動吸收式造波技術領域也普遍采用以板上波高信號為反饋的技術。陳漢寶和鄭寶友[33]設計并制造了不規則波造波機,探討了無反射造波機的實現思路;柳淑學和李木國[34]課題組在Hirakuchi[20]的基礎上設計了高性能的主動吸收式造波系統,并提出代表頻率法,實現不規則波的主動吸收;顧民[35]提出采用濾波器方法解決主動吸收問題,設計了IIR數字濾波器實現主動吸收,并給出了濾波器方法的基本實現思路;李宏偉[36]對時域控制方程方法與頻域濾波器方法進行了統一框架理論下的推導,并將智能控制的思想引入主動吸收造波問題,設計了基于S面控制的主動吸收造波系統;楊洪齊[37]推導建立了二維,準三維和全三維的主動吸收理論體系,設計了IIR數字濾波器,并提出了一種基于高斯牛頓的遞歸重加權最小二乘法來求解模型參數。此外張群[38]、王先濤[39]、王喜林[40]、張亞群[41]、彭棠[42]、蔣頡[43]、楊云濤[44]、白志剛[45]等在主動吸收技術和造波機研制方面均有所貢獻。
2.2 基于板前波高信號反饋的主動吸收式造波技術
基于板前波高信號反饋的主動吸收式造波技術與基于板上波高信號的技術相比,不僅反饋信號有所差異,相應的吸收算法,和時域實現方式均有所不同。Milgram[46]首先推導了基于線性規則波造波理論和線性控制理論的主動吸收理論。其理論的核心在于以吸收端的造波板前一段距離的波高信號為輸入,以主動吸收系統的搖板水面處行程為輸出信號,推導兩者理論上的頻域傳遞函數,為解決吸收系統在零頻率處的大幅值響應問題,對理論傳遞函數進行零頻抑制。再采用最小均方誤差法設計了一個遞歸的有限脈沖響應濾波器(IIR濾波器)逼近傳遞函數。
Christensen和Frigaard[47]通過進行入反射波分離,分離出待吸收的反射波信號。具體方法是在造波板前一定距離處布置兩個波高傳感器,通過限制兩傳感器之間的距離,確定波浪信號的相位差。再通過兩信號的抵消,得到反射波的波高信息,設計有限脈沖響應數字濾波器(FIR濾波器)實現主動吸收。實驗分別對比了水槽末端布置消波灘和布置直立反射墻兩種情況下,開啟與關閉主動吸收系統時的入射波的波譜情況。結果表明,在高反射條件下,主動吸收系統能有效地吸收掉反射波,抑制二次反射波的產生。同時,實驗還驗證了主動吸收系統在造波機停止造波運動后,吸收水槽中余波的效果,結果證明,主動吸收系統能大幅縮短水面平穩時間。
在非線性方面,Lykkey[48]在Sch?ffer[26]和Christensen[47]的基礎上,設計了一套適用于非線性波浪的主動吸收式造波系統。Lykkey的方法有兩處創新之處,一是傳感器的布置形式,改進了Christensen的將傳感器布置在水槽中段的方法,將傳感器布置在距離板前一小段距離的位置上,如此的改進極大地提升了系統對于非線性波浪的吸收效果;二是在頻率傳遞函數的實現方法上,設計了一套全新的FIR濾波器,并給出了FIR濾波器設計的基本流程。實驗結果表明,對于非線性規則波及一階不規則波,在常用的頻率范圍內,反射率在7%以下。同時,系統還有效地消除散射雜波,抑制了高頻波的能量積累。
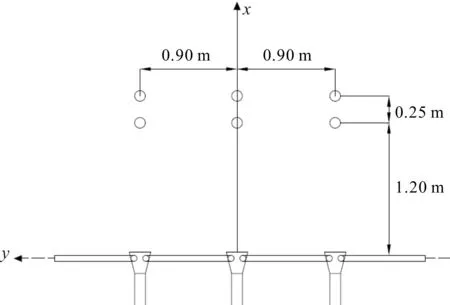
圖3 布置在板前的傳感器陣列示意圖(Christensen)Fig.3 Wave gauge position(Christensen)
在向三維的拓展中,Christensen[49]在Christensen和Frigaard[47]的基礎上,將主動吸收式造波技術的應用拓展到了三維水池。如圖3傳感器布置示意圖,用于采集反饋信號的波高傳感器仍布置在距離造波板一定距離處,但與二維水槽不同的是,控制每塊造波板運動的信號受到6個傳感器的反饋信號的影響,分別為板前的兩個傳感器及相鄰左右兩塊板前的4個傳感器。對于反饋信號的處理有如下過程:每個波高信號通過與預設的濾波器系數進行卷積、進行濾波處理,將各個相位與幅值在時域內進行疊加,得到造波板的控制信號。由于在水池工況下,各反饋信號的相位差值受到反射波方向角的影響而非固定值,故在計算傳遞函數時,假設反射波和入射波有相同的頻率分布和方向分布。實驗對比了水深0.35 m,譜峰頻率0.8 Hz,代表波高0.041 m的Pierson-Moskowitz譜的工況下,開啟與關閉主動吸收系統時的波浪場情況。結果表明,在兩種方向譜分布情況下,主動吸收的效果均十分顯著。
2.3 基于力(矩)信號的主動吸收式造波技術
基于力信號的主動吸收式造波技術有兩種主流的控制方式。一種是力-速度控制,以力信號及其他信號為反饋量,以速度信號為控制量。 Maisondieu和Clemen[50]考慮從推板受到的動水壓力的角度解決二維主動吸收問題。若想實現完全主動吸收,要求造波板以速度U進行運動,并滿足U運動所造成的速度勢與反射波的速度勢相抵消。通過一系列的推導過程得到造波板受力F與造波板速度U之間的關系,
(5)
式中:H(ω)、M(ω)為傳遞系數[51]。該式在頻域中可直接表達,在時域實現過程中存在非因果性問題,故提出了一種使傳遞函數滿足因果關系的近似擬合方法,稱為基于頻率的前饋-反饋因果性擬合法。

圖4 反饋控制示意圖(Chatry)Fig.4 Diagram of self-adaptive control(Chatry)
Chatry等[51]將理論進一步完善,通過設計拓展版卡爾曼濾波器實現不規則波的波浪頻率估計。反饋控制示意圖見圖4。
另一種控制方式是速度-力控制,以速度信號及其他信號為反饋量,以力信號為控制量。Naito[52-53]在Salter[54]的基礎上設計了一套基于速度-力控制的主動吸收式造波系統。系統由浮體、外部電機、位移傳感器和控制系統組成。設計核心在于通過位移傳感器解析獲得浮體的位置信號z和速度信號z′,并通過傳遞系數n(ω)和c(ω)建立起用于吸收的電機力f和浮體位置及速度的關系表達式
fa(t)=n(ω)z′+c(ω)z
(6)
造波力與吸收力相疊加,得到控制電機運動的力信號,從而實現主動吸收式造波。Naito提出了將技術應用在圓形水池中的方案,建成了日本AMOEBA水池,取得不錯的實驗效果。
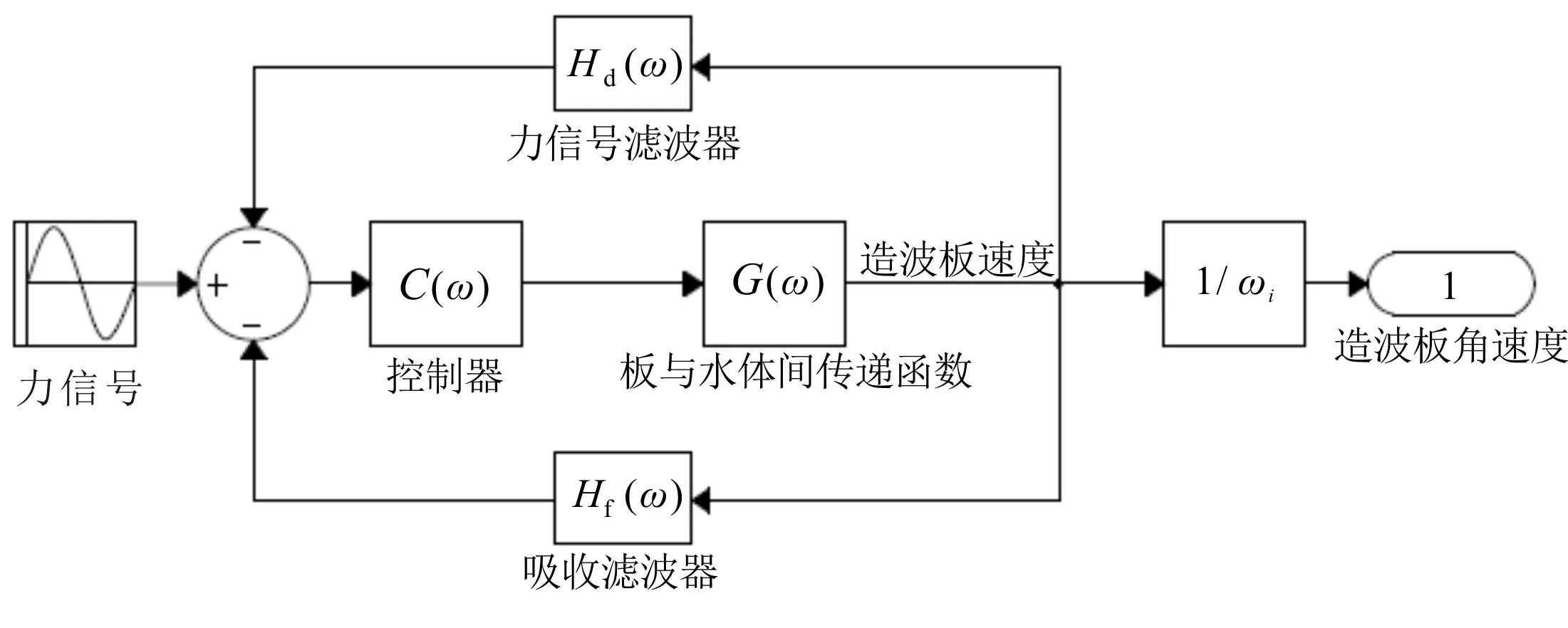
圖5 系統模型示意圖(Spinneken和Swan)Fig.5 Schematic for general system model(Spinneken & Swan)
Spinneken和Swan[55-57]參考Fanles[58]的“阻抗匹配”理論,設計了阻抗匹配數字濾波器網絡。在該系統模型中,采用濾波器算法對造波板的速度信號進行運算。由于速度信號中包括和弦項的影響,所以造波板的受力信號也必須被考慮。故吸收系統包括水動力反饋、吸收濾波器以及造波板的機械動力項。系統模型如圖5所示。Spinneken在數模實驗中對比了其IIR方法與Chatry[51]和Naito[52]等所提出的方法的吸收效果,具體參考Spinneken[56]。結果表明,IIR濾波器方法在低頻率范圍內有不錯的吸收效果,值得注意的是,三種方法的吸收效果都會在高頻情況下快速衰減,這是力信號的固有弊端。物理模型實驗分別進行了推板式造波機和搖板式造波機的主動吸收實驗,在常用頻率范圍內,吸收率在90%以上。
3 技術對比分析
按照波浪反饋信號來區分的三種主動吸收式造波技術,在傳感器性能、系統穩定性上各有優勢與不足,相應的適用范圍也有所不同。如表1所示,對3種技術進行了對比總結。
從傳感器性能來看,3種技術所對應的幾種傳感器及布置形式各有利弊。波高傳感器與力傳感器相比較,技術更加成熟,種類更為繁多,例如電容式、電阻式、聲波式[59-61]多種波高傳感器正被廣泛采用,如圖6所示。但由于波高傳感器多數布置在水中,易受到電磁場、溫度、水質等的影響,穩定性相對布置在機械結構上的力傳感器較差[54]。另外,值得注意的是,采用力信號作為反饋量時,需要保證傳感器測得量為板前水動力,這就要求造波機為干背式或非對稱式造波機。當波高傳感器布置在板前時,所需要的傳感器個數要多于布置在板上時,并且需要額外的支架將傳感器固定。

表1 三種主動吸收式造波技術對比Tab.1 Comparison of the three active-absorption wavemaker technologies
6-a 電容式6-b 電阻式6-c 聲波式(超聲波探頭)圖6 多種波高傳感器Fig.6 Wave height sensors
從系統的穩定性上來看,基于板上波高信號和力信號反饋的主動吸收系統為非因果系統,系統當前的輸出不僅受到當前和過去的輸入信號的影響,還受到將來的輸入信號影響,具體見Sch?ffer[23]。針對系統非因果性問題的解決,也是當前主動吸收技術發展的主要方向之一。同時,于傳感器布置在板上,波浪的非傳播模態項必須被考慮。對于非傳播模態項的討論,參考楊洪齊[62];由于板前傳感器位置距離造波板一段距離,波浪從造波板傳遞到傳感器位置時非傳播模態項耗散殆盡,所以可忽略不考慮,另外,反射波浪從傳感器傳遞到造波板存在一定時間間隔,滿足程序的運算和指令發送的延遲要求,有效避免延遲誤差的積累。而板上傳感器不可避免地出現時間延遲問題;另外,力信號與波高信號相比較,力信號是積分量,代表整個造波板的受力,在受到外部擾動項時受到的影響更小。
從適用范圍上來看,由于三種技術的算法和結構形式均不盡相同,故有著不同的適用性。基于板上波高信號的技術適用范圍最為廣泛,在較寬的頻域范圍內,既滿足二維水槽、三維水池工況,也適用于非線性工況, 吸收效果可參考Sch?ffer[23]的實驗結果;基于板前波高信號的技術可適用于二維、三維、非線性工況,但在特定頻域區段內適用, Lykke[48]的實驗結果表明在0.15~1.2 Hz,主動吸收效果顯著。但值得注意的是,由于波浪的入反射分離過程中存在頻率奇點,故在特定的頻率點上主動吸收效果較差,應盡量避過;基于力信號的技術同樣適用于二維、三維工況,但目前還處于準三維階段,在非線性方面,Spinneken[57]建立了完整的二階力控制的造波理論體系,非線性主動吸收方面部分實現。基于力信號的技術在頻率范圍內,主要適用于低頻段,這是由于高頻造波時,板前非傳播模態項所導致的波浪力占比較大,影響了反射波的波浪動力的反饋。
主動吸收式造波技術被廣泛應用于世界各研究機構的高性能波浪水池中,其中基于板上波高的技術由于適用范圍廣,發展比較成熟,在世界范圍內被廣泛采用,例如荷蘭MARIN水池、巴西圣保羅大學TPN水池[63]等,如圖7-a、7-b所示,我國國內的帶有主動吸收功能的水槽及水池多數也采用該項技術,如大連理工大學海岸和近海工程國家重點實驗室的多功能水池等;基于板前波高的技術起源于丹麥奧爾堡大學,并由Christensen課題組不斷開發完善,具體的應用實例如西班牙格拉納達大氣-海洋相互作用水槽[48],如圖7-c所示;基于力信號的技術主要應用在英國、日本等水池設施中,例如英國愛丁堡大學FloWave水池[64]和日本NMRI圓形水池[65]等,如圖7-d、7-e所示。

7-a 荷蘭MARIN水池7-b 巴西圣保羅大學TPN水池7-c 西班牙拉納達大氣-海洋相互作用水槽
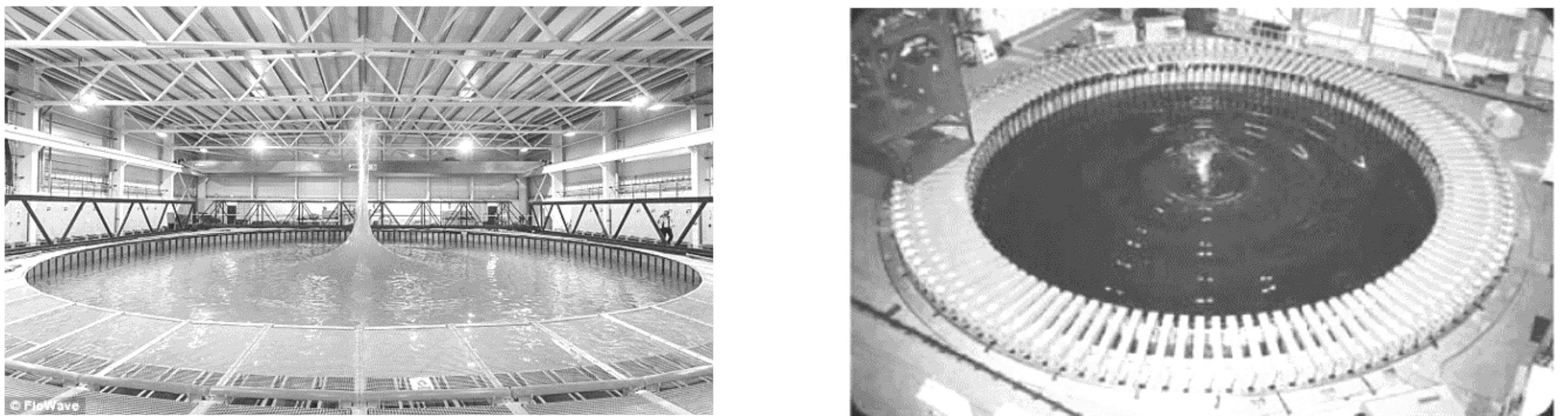
7-d 英國愛丁堡大學FloWave水池7-e 日本NMRI圓形水池圖7 主動吸收式造波技術應用實例Fig.7 Application of active-absorption wavemaker technology
4 主動吸收式造波技術核心及難點
通過對各種技術特點的回顧與總結,分析得到主動吸收式造波技術的三部分核心:波浪信息的反饋、主動吸收算法的實現以及造波機系統的搭建。相應地,實現主動吸收功能的主要難點也在此體現。
4.1 波浪信息的反饋
具有主動吸收功能的造波機系統與不具備主動吸收的造波系統的差異體現在是否有反饋控制過程。反饋信號可以是板前波高、板上波高、造波板受到的波浪力、電機速度等各種能反映波浪場信息的信號。信號反饋的作用是使得運動控制器識別并消除反射波或二次反射波。
由于主動吸收算法對于輸入信號十分敏感,要求傳感器采得的信號精準且平滑,如若反饋信號毛刺嚴重,會導致造波板劇烈抖動,嚴重影響生成的波面質量。圖8-a中第一條線代表受干擾的電容傳感器的信號,以該信號為反饋量時,造波板抖動導致橫波,波峰線不整齊,如圖8-b所示。針對反饋信號有毛刺的現象,一般的解決措施包括:接外部地線、對傳感器加屏蔽層、濾波器濾波等方法。或是更換采用信號質量更高的傳感器,例如采用圖8-b中右側的激光傳感器時,收集到的信號為圖8-a中第二條線。另外,傳感器信號的傳輸時間延遲,也會影響主動吸收的效果,關于時間延遲的影響在下文論述。
4.2 主動吸收算法的實現
主動吸收算法將傳感器反饋的波浪信號與造波板的運動建立聯系,是實現主動吸收功能最重要的部分。常用的方法包括模擬遞歸濾波器方法、FIR數字濾波器方法、IIR數字濾波器方法,時域控制方程法以及智能控制方法等。
規則波的主動吸收算法的難點主要集中在非傳播模態項的處理上;不規則波的算法的難點在于系統的非因果性的處理;三維波浪的算法的難點在于波浪方向角的實時探測;非線性波的算法難點在于控制理論的非線性化。而針對上述問題的解決方案,具體參考上文。
另外當傳感器布置在板上時,必須考慮時間延遲的問題,De Mello[63]詳細分析了TPN 水池的吸收式造波系統,延遲來源包括傳感器采集延遲,算法計算延遲以及信號通訊延遲,計算得其總延遲時間為29.9 ms。針對延遲問題,通常的解決方法在主動吸收傳遞函數中進行修正。楊洪齊[62]進行了有延遲補償和無延遲補償的規則波的波浪曲線對比,在規則波造波實驗中,無延遲補償情況下,傳感器反饋實時波高信號與造波板做出造波運動之間存在時間差,該時刻吸收的為一段時間前的反射波,直接影響吸收效率,導致波面曲線不平整光滑。進行延遲補償后,波面曲線光滑程度明顯提高。

8-a 傳感器信號示意圖8-b 主動吸收式造波情況圖8 干擾信號的影響Fig.8 Influence of interference signal
4.3 造波系統的搭建
造波系統的搭建分為三項:控制系統、造波機結構以及整體布置型式。主動吸收式造波系統的控制系統包括反饋傳感器、運動控制器、伺服驅動器、電機等,不同的控制系統組成以功能有所差異。機械傳動結構方面主要分為推板式、搖板式、楔形造波機等,如圖9-a、9-b、9-c所示。推板式造波機力矩大,適合淺水情況;搖板式力矩小,板與水體運動擬合度更高,適合深水情況;楔形造波機[66]為非對稱結構,楔形塊體沿著斜向導軌運動,推動表層水體進行造波,如圖9-c所示,優點是適合造淺水波,且在造波的同時,避免了板后水體震蕩,適用于淺水波浪理論以及基于力信號的造波技術。另外,按照造波板后是否有水也分為干背式和濕背式造波機,干背式同樣由于板后水體不發生運動,而適用于基于力信號的造波技術,如圖9-d所示。Svendsen[67]曾對多種造波機結構進行過詳細描述。從整體布置型式上來看,有L型造波機陣列、方形造波機陣列、圓形造波機陣列布置等。

9-a 推板式9-b 搖板式9-c 楔形體9-d 干背式圖9 造波機結構型式Fig.9 Structure type of wave maker
5 結語與展望
在世界范圍內,當前主動吸收式造波技術可適用于全三維水池及非線性工況,但適用頻率范圍還存在一定的局限。在國內方面,由于發展的起步較晚,故當前所采用的主要是對國外技術復現和改進,且主要采用以板上波高為反饋信號的主動吸收式造波技術,在全三維和非線性方面發展還嚴重不足。隨著我國海洋事業的發展,國內各研究機構對于帶有主動吸收功能的造波水池需求很大,主動吸收式造波技術值得進一步的研究與發展,主要包括:
(1)隨著實驗室造波理論的發展,主動吸收式造波技術的適用范圍從最初的二維線性工況,到應用于水池中的三維線性工況及精度更高的非線性工況,波浪模擬精度不斷提高。在未來發展中,不僅要對造波理論進行創新,還應對諸如波浪傳播變形問題、波浪水質點速度匹配問題等進行深入研究,從而實現對實際海洋波浪的精準還原。
(2)主動吸收式造波系統涉及波浪理論、控制理論、機械自動化、信號與系統等諸多學科。主動吸收式造波技術的發展與各學科的發展水平緊密相關。在未來發展中,應設計更穩定、更精確的濾波器提高造波質量;提高傳感器性能,縮短信號反饋時間,減少誤差等。另外,未來造波技術的創新也應著力于新興學科,如將智能控制應用在主動吸收過程中[68-69],將信號學算法應用于方向角的實施探測過程等[70]。
(3)隨著海洋工程、港口工程領域研究的深入,主動吸收式造波技術的應用范圍不應局限于單一造波過程。在泥沙實驗、海工港工結構實驗以外,新的更復雜的實驗工況如波流耦合[71],波浪地震共同作用[72]等也對主動吸收式造波技術提出了發展新要求。在未來的發展中,該項技術可應用于人工智能造波,數模物模同步造波等場景以及新式海浪消能裝置及發電裝置的開發等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25