改進鯨魚算法優化支持向量回歸的光伏最大功率點跟蹤
2021-05-12 06:19:46李畸勇張偉斌趙新哲鄭一飛
電工技術學報 2021年9期
關鍵詞:模型
李畸勇 張偉斌 趙新哲 劉 斌 鄭一飛
(1. 廣西大學電氣工程學院 南寧 530004 2. 廣西電力系統最優化與節能技術重點實驗室 南寧 530004)
0 引言
近年來隨著化石能源儲量日益下降及生態環境惡化趨勢日益顯著,太陽能由于屬于安全環保、容易獲取的新型可再生能源,正在發展成為世界新能源組成中的重要部分[1-6]。但由于光伏發電受制于材料物理性能限制,轉換率較低,為了使光伏發電系統能夠以較高效率利用太陽能,部分光伏發電技術研究者將研究重點轉移至最大功率點跟蹤(Maximum Power Point Tracking, MPPT)技術研究[7-8]。當光伏陣列的各組件所受光照度一樣時,其P-U曲線呈現單峰特性,傳統MPPT 算法如擾動觀測法[9]、電導增量法(Incremental Conductance, INC)[10]等可以較為準確地跟蹤到最大功率點,然而實際應用中往往受安裝環境及復雜氣象因素影響,光伏陣列容易受到云霧、建筑物、積灰遮擋,導致其功率輸出曲線呈現多峰特性,此時傳統MPPT 控制方法往往會陷入局部尋優,無法準確跟蹤到全局最大功率點(Global Maximum Power Point, GMPP),使得光伏陣列輸出功率大幅降低,導致功率損耗[11-13]。
為了解決局部遮陰情況下傳統 MPPT 控制方法無法搜索到GMPP 問題,國內外許多學者展開了大量的相關研究。文獻[14]提出一種光伏陣列可重構優化配置方法,該方法根據光照在光伏陣列分布情況,采用矩陣式開關動態調整光伏陣列連接方式,減小由遮擋引起的功率損耗,雖然在一定程度上解決了功率失配問題,但由于其需要增加配置大量開關器件,導致系統硬件成本增加。文獻[15-16]針對粒子群優化算法具有參數少、收斂速度較快優點,將其應用到光伏MPPT 控制中,取得了較為理想的控制效果。文獻[17]針對粒子群算法在MPPT 控制中由于參數設置無法較為準確地跟蹤到GMPP 問題,提出將粒子群與電導增量法相結合的復合控制算法,仿真結果表明該復合算法可以有效提高跟蹤精度。文獻[18]針對細菌覓食算法的尋優機制導致收斂精度與速度存在不足的問題,將全局學習方向與步長自適應調整策略引入到傳統的細菌覓食算法中,同時利用兩步法MPPT 控制策略將其應用到光伏MPPT 控制中,仿真結果表明所提方法能夠在動態環境條件下高效地跟蹤到GMPP,且魯棒性較好。
鯨魚優化算法(Whale Optimization Algorithm,WOA)是S. Mirjalili 等通過長期跟蹤觀察座頭鯨捕食的行為方式,研究總結設計出的一種新型優化算法,與其他優化算法對比,該算法不僅原理簡單易懂,所需手動調節設置的參數少,而且在算法運算速度方面也具備一定的優勢,在煉鋼終點預測[19]、短期風電預測[20]、車間調度[21]等諸多領域都取得了不錯的應用效果。但WOA 與其他優化算法同樣在收斂精度與跳出局部最優方面存在一定不足。本文首先在WOA 基礎上引入對數權重因子與隨機差分變異策略,增強了算法在全局搜索與局部開發協調性能及跳出局部最優能力;然后利用改進鯨魚優化算法(Improved WOA, IWOA)與支持向量機回歸相結合建立了光伏陣列最大功率點電壓預測模型,并將其與電導增量法相結合應用到光伏MPPT 控制;最后利用Matlab/Simulink 搭建仿真模型,仿真結果表明本文所建立的光伏陣列最大功率點電壓預測模型具有較高的預測精度,在光伏MPPT 控制應用中也取得了較為理想的效果,無論在局部遮陰或光照突變情況下都能快速準確搜索到GMPP。
1 局部遮陰下光伏陣列多峰特性分析
光伏電池的等效電路如圖1 所示,圖中,ID為暗電流。
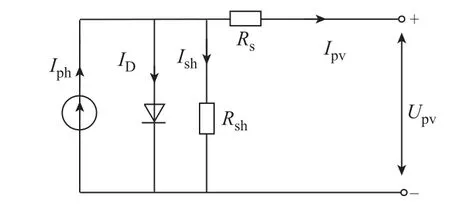
圖1 光伏電池的等效電路Fig.1 Equivalent circuit of photovoltaic cell
由電子學理論分析可推得其輸出電流的數學方程表達式為
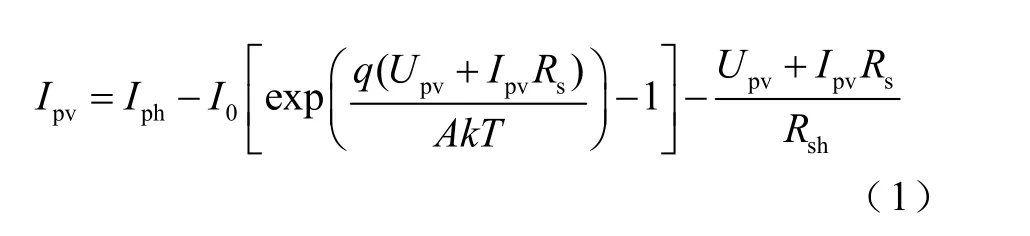
式中,Upv和Ipv分別為單體光伏電池輸出電壓與輸出電流;Iph為光生電流;q為電子電荷;I0為反向飽和電流;Rsh和sR分別為等效并聯電阻與串聯電阻;k為玻耳茲曼常數,k=1.35×10-23J/K;A為PN 結特性因子;T為光伏電池的溫度。
由于式(1)中A、Rs、Rsh、I0參數的值與溫度和光照強度等外部條件有關,而光照強度和溫度會因環境而異,因此很難準確地測量到,工程上為方便分析其輸出特性簡化了其數學模型,提出簡化參數關系為
式中,Im為最大功率點輸出電流;Isc為短路電流;Um為最大功率點輸出電壓;Uoc為開路電壓。
考慮到單體光伏電池最大輸出電壓也僅有微弱的0.6V 左右,無法直接應用到日常供電,工程應用中通常按照輸出特性要求以一定的串并聯方式將一定數量的單體光伏電池封裝成光伏組件,再根據實際工程應用對電壓電流的要求將一定數量的光伏陣列串并聯起來組成光伏陣列。光伏組件處于局部遮陰情況下,部分單體電池將成為電路中的負載消耗能量,并導致光伏組件局部溫度過高,形成“熱斑效應”。為了防止“熱斑效應”對光伏組件造成不可逆的損壞,通常會在光伏組件正極輸出端與負極輸出極間并聯一個二極管。另外,為了防止各并聯支路間的電流倒流,通常需要在并聯電路間配置防逆二級管。因此光伏陣列的典型構造如圖2所示。
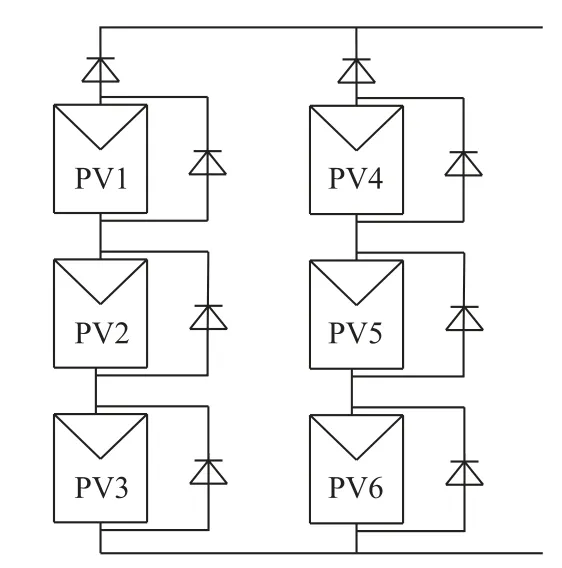
圖2 光伏陣列結構Fig.2 Structure diagram of photovoltaic array
本文在Simulink 平臺上建立了3×2 的光伏陣列仿真模型,利用該仿真模型對光伏陣列處于局部遮陰情況下的輸出特性進行研究分析。將該光伏陣列的6 塊光伏組件按照圖2 所示進行編號,各光伏組件的具體參數:Uoc均為36.9V、Isc均為9A、最大輸出電流Im均為8.34A、最大輸出電壓Um均為30V。設置兩種遮陰情況,其中,遮陰1:光伏組件溫度25℃,PV1 與PV4 所受光照強度為600W/m2,PV2與PV5 所受光照強度為800W/m2,PV3 與PV6 所受光照強度為1 000W/m2;遮陰2:光伏組件溫度25℃,PV1 與PV4 所受光照強度為800W/m2,PV2 與PV5所受光照強度為400W/m2,PV3 與PV6 所受光照強度為400W/m2。
圖3 為兩種局部遮陰情況下光伏陣列輸出特性仿真曲線。
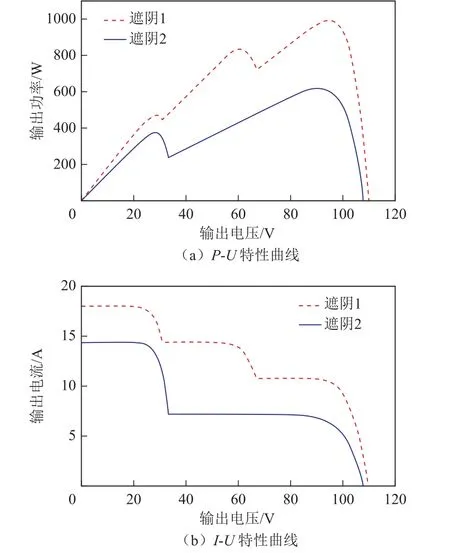
圖3 局部遮陰下光伏陣列輸出特性仿真曲線Fig.3 Simulation curve of output characteristics of photovoltaic array under partial shading
由圖3 分析可知,當光伏陣列受光不均勻時,其輸出曲線將出現多個極值點,當光伏陣列處于遮陰情況1 時,其P-U曲線具有三個極值點,I-U曲線呈三階梯形狀;而當光伏陣列處于遮陰情況2 時,其P-U曲線具有兩個極值點,I-U曲線呈雙階梯形狀。綜上可得,當光伏陣列處于不同遮擋情況,其功率輸出曲線的峰值數量也有所差異,傳統的MPPT 算法由于其搜索機制,將陷入局部尋優狀態,無法準確跟蹤到GMPP,因此研究適用于局部遮陰的光伏MPPT 控制算法就顯得格外重要。
2 鯨魚優化算法改進研究與性能驗證
2.1 鯨魚優化算法
WOA 是由S. Mirjalili 等[22]通過長期跟蹤觀察座頭鯨捕食的行為方式,研究總結設計出的一種新型優化算法。座頭鯨的螺旋氣泡網捕食策略包括包圍目標獵物、螺旋泡泡網攻擊、搜索目標獵物三個環節,如圖4 所示。
圖4 座頭鯨螺旋氣泡網覓食策略Fig.4 Foraging strategy of spiral bubble net by humpback whale
2.1.1 包圍目標獵物
座頭鯨在狩獵中可以通過識別目標獵物位置調整自身位置將其包圍。在包圍過程中,以當前距離目標獵物最近的個體座頭鯨位置為當前最優解位置,其他座頭鯨個體動態更新它們的位置向最優座頭鯨位置靠近,包圍目標獵物。該行數學模型為
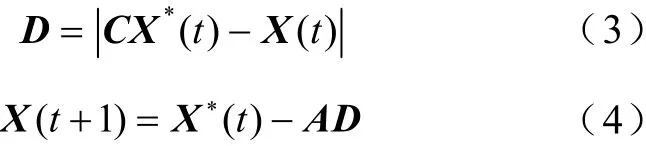
式中,D為最優個體位置與當前個體位置的距離;X?(t)為當前最優解的位置向量;X(t)為當前解的位置向量;t為當前迭代;A和C為參數向量,其具體數學表達式分別為

式中,1r與2r為值在[0,1]中的隨機向量;a為迭代搜索中從2 線性減小到0 的參數,其數學表達式為

式中,tmax為最大迭代次數。
2.1.2 螺旋泡泡網攻擊
座頭鯨的螺旋泡泡網攻擊方式是按照收縮包圍與螺旋前進對自身位置進行更新逐漸靠近獵物并發動攻擊,螺旋式位置更新表示為

式中,l為[0,1]之間的隨機數;b為常數參數。
2.1.3 搜索目標獵物
座頭鯨除了利用螺旋泡泡網搜索目標獵物外,還會根據個體間彼此的位置進行隨機游走尋找獵物。當隨機控制參數會迫使個體鯨魚遠離最優鯨魚個體,根據隨機選中的個體鯨魚位置進行位置更新,執行全局探索;當時,選擇最優鯨魚個體位置更新各鯨魚個體位置,執行局部搜索,根據p值,在螺旋運動和圓環包圍獵物運動之間進行切換。數學模型為
式中,Xrand為座頭鯨群體中被隨機選中的個體的位置向量。
2.2 改進鯨魚優化算法
2.2.1 基于余弦變化的非線性控制因子
WOA 算法雖然原理簡單易懂,所需手動調節設置的參數少,而且在算法運算速度方面也具備一定的優勢,但從WOA 算法原理可知,其尋優與其他算法一樣需要平衡局部開發與全局搜索能力,即通過參數A的大小進行協調。而從式(5)又能夠看出控制參數A值的變化是取決于a參數的變化,a值越小表示算法局部開發能力越強,a值越大表示算法在全局搜索方面的能力越強。a為迭代搜索中從2 線性減小到0 的參數,而在實際復雜函數尋優中,控制因子a以線性規律減小是無法滿足的,易導致算法難以跳出局部最優,尋優效果欠佳。針對該不足,本文引入了余弦非線性控制因子,其具體表達式為
從式(11)可以看出,在前期迭過程中,a值從2 開始以較為緩慢的速度減小,有利于進行充分的全局搜索,而后期迭代過程中,a值的減小速度明顯加快,有利于局部搜索,加快收斂速度。
2.2.2 自適應權重因子w對數變化
文獻[23]研究指出,當權重因子較大時,其搜索范圍較大,有利于全局搜索;而當其值較小時,可在較小范圍內執行高精度搜索。為了增強鯨魚優化算法的尋優能力,本文引入具有對數變化規律的自適應權重因子,利用其對算法位置進行更新。權重位置調整數學模型為

式中,p為[0,1]之間的隨機數;p?取值為0.5;自適應權重因子w(t)的數學公式為
由式(13)可知,在前期迭代過程中w值較大,表示參與位置調整的步長值較大,算法全局探索能力較強,而到了迭代后期,w值越來越小并接近零,算法局部搜索能力越來越強。
2.2.3 隨機差分變異
根據基本鯨魚優化算法原理可知,在尋優過程中當前個體會根據最優個體位置與自身距離進行位置更新,也就是說其他非當前最優個體將逐漸往最優個體位置逼近。很明顯,這種更新方式存在一定弊端,也就是當當前最優個體的位置并不是全局最優時,隨著迭代次數的增加,種群中的所有個體將被錯誤引導聚集在局部最優區域附近,使得群體多樣性降低,導致算法早熟收斂,尋優精度低。針對該問題,本文吸取了差分進化算法中差分變異策略的優點,將隨機差分變異策略融合到基本鯨魚算法中去,即將群體中被隨機選中的個體和當前最優個體分別與當前個體進行隨機式差分生成新的個體,增加群體個體的多樣性,防止算法由于早熟收斂陷入局部最優。
隨機差分變異式為

式中,X′為被隨機選中個體的位置向量;u為[0,1]之間的隨機數。
2.3 IWOA 算法性能驗證
為了對比改進的鯨魚算法與普通鯨魚算法的尋優效果,本文對國際上經常使用的七個通用基準測試函數進行測試,通用基準測試函數具體信息見表1。為了使性能測試對比具備公平性,統一將種群總個體數設置為30 個,最大迭代次數為500 次。測試對比結果見表2。
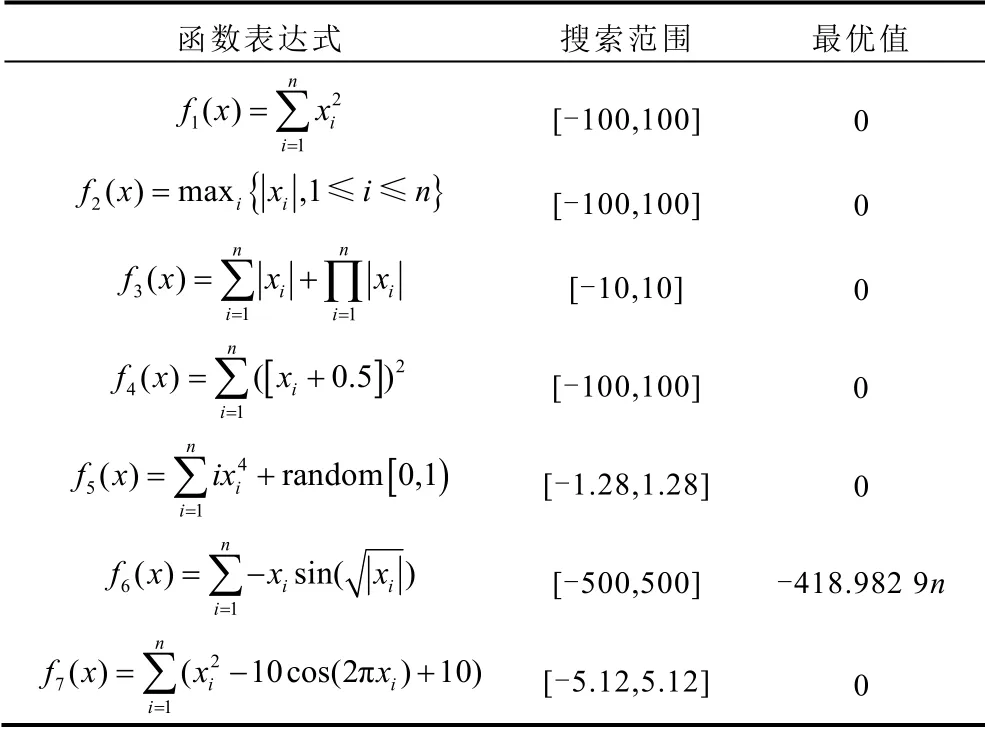
表1 七個通用基準測試函數Tab.1 Seven general benchmark functions
從表2 可以清楚地觀察到,IWOA 算法在單峰值測試函數尋優中能夠以更快的速度搜索逼近理論最優值;同時,IWOA 算法在多峰值測試函數尋優中也具備一定的優勢,與WOA 算法相比,其能夠更快地跳出局部最優,尋優精度更高。
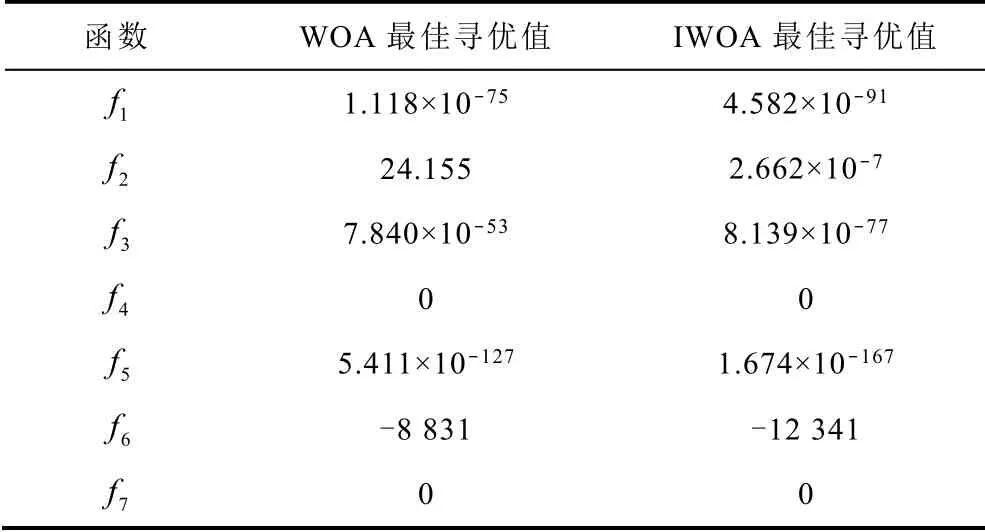
表2 WOA 與IWOA 函數測試對比結果Tab.2 Comparison results of WOA and IWOA function tests
為了更加直觀地體現出IWOA 算法在通用基準測試函數尋優中的優越性,本文給出IWOA 算法與WOA 算法在測試函數f2、f3、f6、f7尋優仿真對比,如圖5 所示。
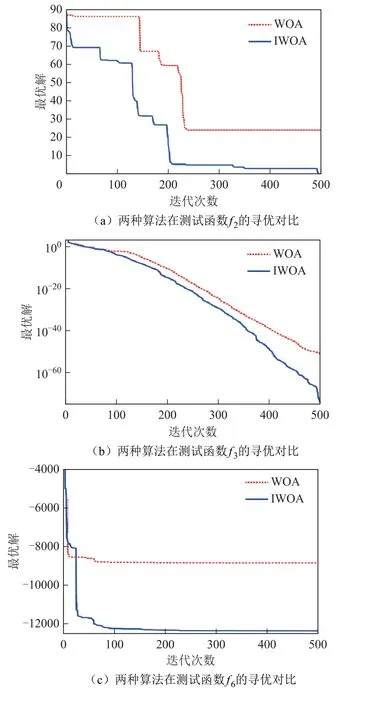

圖5 兩種算法在測試函數的尋優對比圖Fig.5 Comparison diagram of optimization between two algorithms in test function
為了進一步驗證IWOA 算法對比其他優化算法在通用基準測試函數尋優中同樣具備一定的優越性,本文采用 IWOA 算法與遺傳算法(Genetic Algorithm, GA)、自適應遺傳算法(Adaptive Genetic Algorithm, AGA)、粒子群算法(Particle Swarm Optimization, PSO)、自適應權重粒子群算法(Adaptive Particle Swarm Optimization, APSO)、基本鯨魚算法對表1 的七個測試函數進行測試對比。統一將函數維度設置為30,群體個數為30,最大迭代次數為500 次,且為了避免偶然因素對測試結果的影響,每個測試函數獨立運行20 次。計算每個算法20 次尋優的平均精度與標準差并記錄,對比結果見表3。從表3 可以清楚地看出IWOA 算法相較于其他五種算法具備更好的尋優性能。
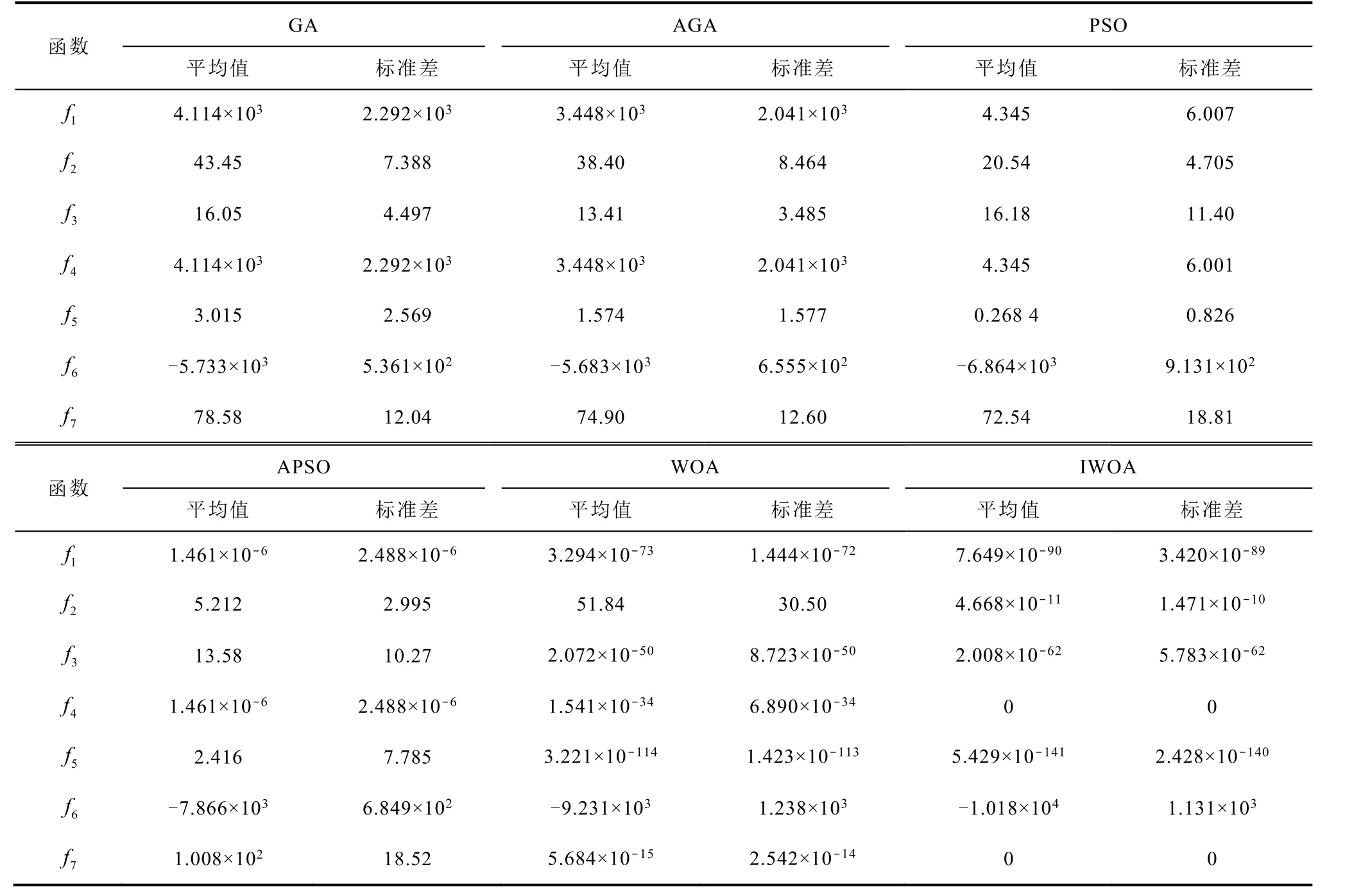
表3 GA、AGA、PSO、APSO、WOA 與IWOA 函數測試對比結果Tab.3 Comparison results of GA, AGA,PSO, APSO,WOA and IWOA in function tests
3 基于IWOA-SVR 最大功率點電壓預測模型建立與仿真對比分析
3.1 預測模型建立
支持向量機(Support Vector Machines, SVM)是由V. N. Vapnik 等提出的一種可用于回歸預測以及解決各種分類問題的機器學習方法,其具體數學原理與公式推導參見文獻[24]。支持向量回歸(Support Vector Regression, SVR)算法具備優異的全局優化性能,在維數較高且具備復雜非線性特點的小數量樣本回歸預測應用中展現出了較好的泛化能力[25-26],因此本文利用SVR 算法對光伏陣列最大輸出功率點電壓進行回歸預測。根據光伏陣列輸出特性分析可知,影響光伏陣列最大功率點電壓值的因素主要有光照強度E、光伏組件溫度T和各光伏組件遮擋度S,因本文研究的是3×2 的光伏陣列,所以將E、T、1S、S2、S3設置為預測模型的輸入變量,將MPP 對應的電壓值設置為預測模型的輸出變量,即

為了保證能夠選擇到較優的SVR 參數,需要一定數量的數據用于預測模型的訓練及預測性能的驗證,本文通過搭建3×2 光伏陣列仿真模型,根據氣象條件人工仿真模擬出400 組數據,隨機從中選取340 組數據作為訓練樣本,測試樣本則取剩余60 組數據,利用其進行預測模型性能驗證。
由于SVR 回歸預測模型的性能在很大程度上受懲罰參數c和核函數參數g的影響,因此在模型建立中對c、g進行最優選擇是相當重要的。本文利用改進的鯨魚算法對SVR 回歸預測模型的參數c、g進行最優選擇。IWOA-SVR 建模流程如圖6所示。
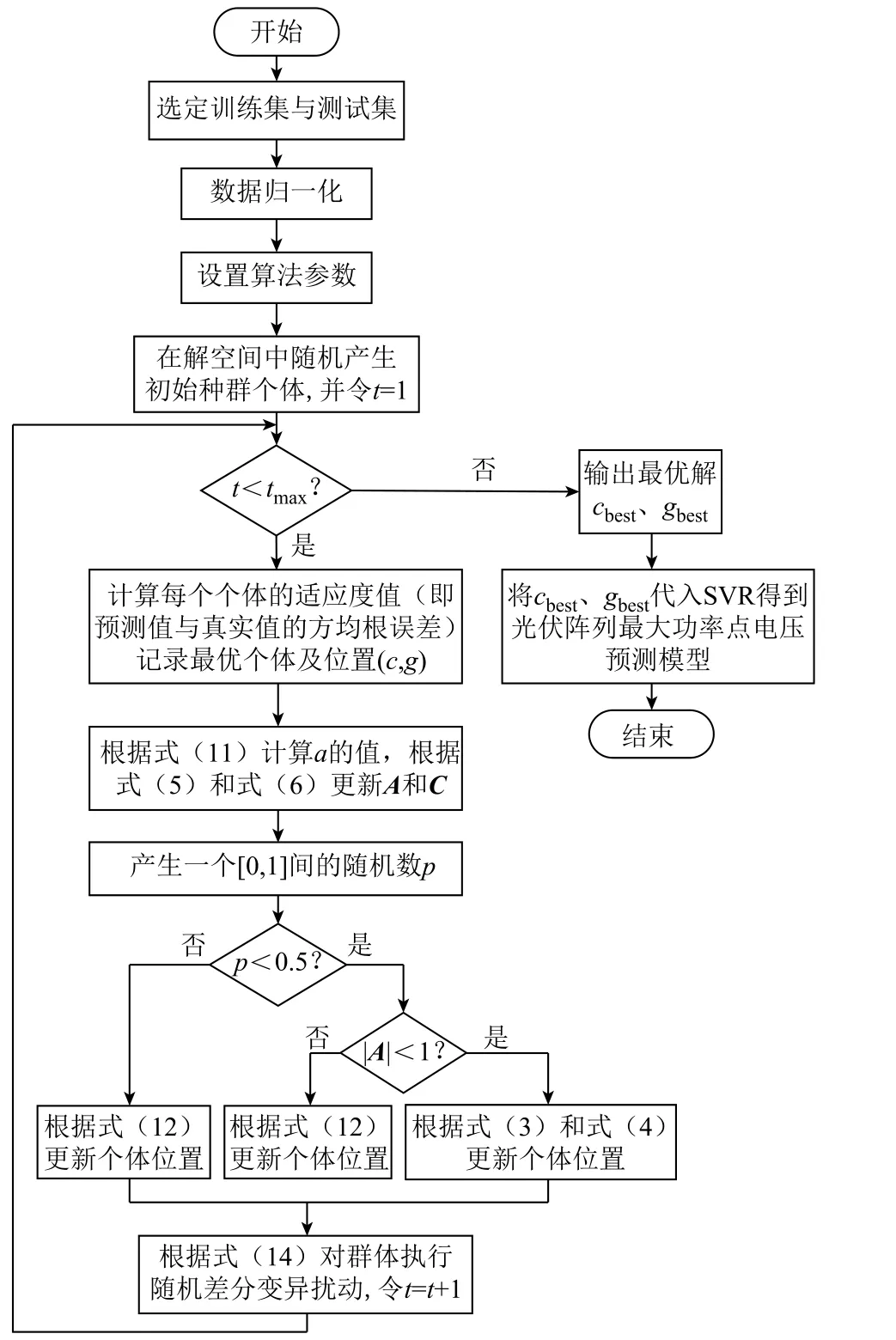
圖6 IWOA-SVR 建模流程Fig.6 IWOA-SVR modeling flow chart
3.2 預測模型性能分析
為了驗證所提IWOA-SVR 預測模型的優越性,本文將其與遺傳算法進行參數最優選擇的支持向量機回歸預測模型(GA-SVR)、粒子群算法進行參數最優選擇的支持向量機回歸預測模型(PSO-SVR)進行對比。此外,為了進一步體現所提預測模型相較于其他預測算法建立的預測模型在預測準確度也具備一定優勢,將其與BP 神經網絡建立的預測模型、Elman 神經網絡建立的預測模型進行對比。其中GA 參數設置:1p=0.9,p2=0.01;PSO 參數設置:1c=1.5,c2=1.5;三種算法的種群個體總數均設置為40,最大迭代次數為200;選取徑向基函數為支持向量機回歸模型的內核。各預測模型在測試樣本預測的預測誤差指標見表4,GA-SVR、PSO-SVR、IWOA-SVR 預測效果對比如圖7a 所示,IWOA-SVR、BP 神經網絡、Elman 神經網絡預測效果對比如圖7b所示。
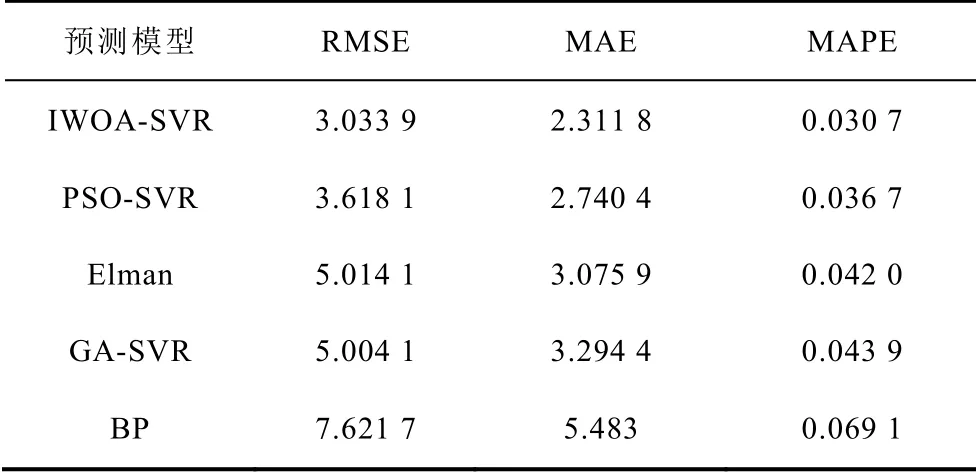
表4 不同預測模型的預測誤差指標Tab.4 Prediction error index of different prediction models
結合表 4 與圖 7 可知,本文所提出的基于IWOA-SVR 預測模型在預測性能上有了一定提升,相較于其他優化算法進行參數尋優的SVR 預測模型具有更高的預測精度。從表4 可以得到,IWOASVR 預測模型在RMSE、MAE、MAPE 三個預測誤差指標上分別比GA-SVR 預測模型降低了1.970 2、0.9 8 2 6與0.0 1 3 2;在與P S O-S V R預測模型預測對比中,三個預測誤差指標也分別降低了0.5 8 4 2、0.4 2 8 6與0.0 0 6;此外,在與其他預測算法建立的預測模型對比中,I W O A-S V R預測模型也具備更高的預測精度,R M S E、M A E、M A P E三個預測誤差指標比B P神經網絡預測模型分別降低了4.5 8 7 8、3.1 7 1 2與0.0 3 8 4;與E l m a n神經網絡預測模型預測對比,R M S E、M A E、M A P E三個預測誤差指標也分別降低了1.9 8 2、0.7 6 4 1與0.0 1 1 3。綜上可知,基于I W O A-S V R光伏陣列最大功率點電壓預測模型相較于其他預測模型具有更高的預測精度,能較為準確地預測到光伏陣列最大功率點電壓。另外本文所提出的I W O A-S V R預測方法在計算復雜度也有一定的優勢,三種同類型預測方法均采用M a t l a b編程實現,在同一臺計算機上完成訓練與預測所耗費的時間分別為:I W O A-S V R預測方法耗費2 3.8 1 4 7 s,其中訓練所耗費時間為2 3.7 4 1 7 s,預測所用時間為0.0 0 7 3 s;G A-S V R預測方法耗時3 1.1 7 2 6 s;P S O-S V R預測方法耗時2 7.3 6 8 8 s。由此可見,I W O A-S V R預測模型訓練時間最短,充分體現了計算復雜度低帶來的優勢,并且具備優異的實時性能。
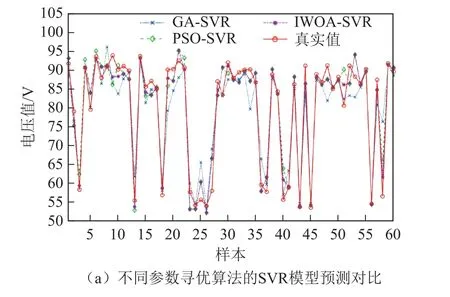
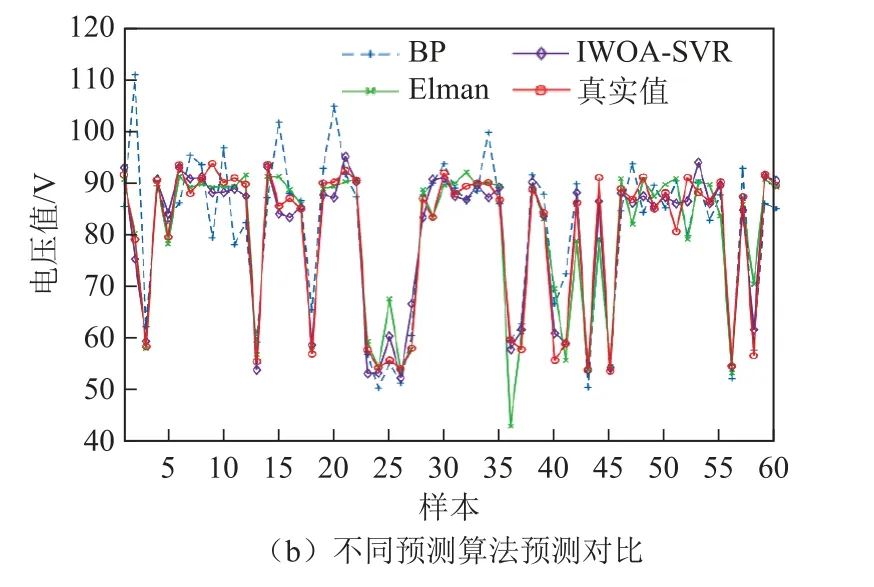
圖7 不同預測模型預測結果對比Fig.7 Comparison of different forecasting models
4 基于IWOA-SVR 光伏多峰MPPT 算法研究與仿真分析
4.1 基于IWOA-SVR 與INC 結合的光伏多峰MPPT 算法
將IWOA-SVR 光伏陣列最大功率點電壓預測模型與小步長電導增量法相結合應用到光伏MPPT控制中,其實質是非線性預測控制問題。該復合MPPT 控制算法的基本思路:首先采集環境參數與光伏陣列輸出電壓和電流數據,并計算每塊光伏組件的遮陰度,將光照強度、每塊光伏組件的溫度及遮陰度進行歸一化后作為IWOA-SVR 預測模型的輸入變量,由IWOA-SVR 預測模型預測出最大功率點電壓值,再利用一定的算法得到PWM 控制信號,將光伏陣列實際工作點調節到最大功率點,最后利用小步長INC 進行局部尋優,進一步提高跟蹤精度。其中,為了防止IWOA-SVR 預測模型實時預測控制導致輸出功率波動較大,本文對IWOA-SVR 預測設置了啟動條件,即當光伏陣列所處環境條件變化較小時,由小步長INC 進行最大功率點跟蹤,而當所處環境條件變化較大時,重新啟動IWOA-SVR 預測并重復之前步驟,實現全局最大功率點追蹤。重啟條件數學公式如式(16)所示,該復合MPPT 控制算法流程如圖8 所示。
式中,P′為當前采樣時刻光伏陣列輸出功率值;P為上一采樣時刻光伏陣列輸出功率值;ΔPset為光伏陣列輸出功率允許的最大變化量。
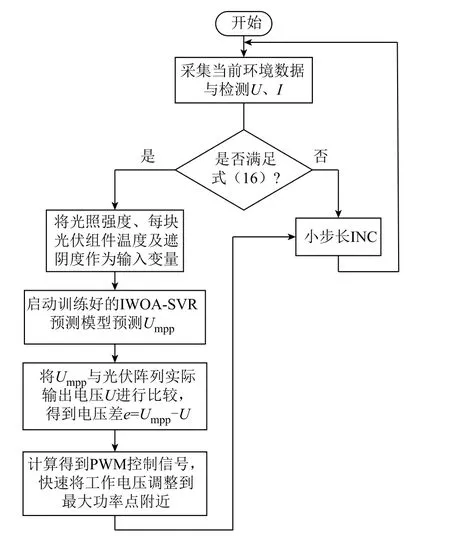
圖8 復合MPPT 控制算法流程Fig.8 Composite MPPT control algorithm flow chart
4.2 仿真對比分析
為了驗證所提出的基于IWOA-SVR 與小步長INC 相結合的復合MPPT 控制算法的有效性,本文借助Matlab/Simulink 仿真軟件搭建了復合MPPT 控制系統仿真模型如圖9 所示。該仿真系統模型主要由六塊光伏組件通過串并聯組成的3×2 光伏陣列模塊、基于IWOA-SVR 與小步長INC 相結合的復合MPPT 控制模塊、Boost 變換模塊及PWM 驅動模塊。利用光伏陣列仿真模型仿真,可得當光陣列處于情況1:光照強度S3=0.4、T= 21℃時,光伏陣列P-U輸出特性曲線有三個峰值點,其中第1 個峰值點的功率值大小為158W,對應電壓為26.7V;第2 個峰值點功率值為235.2W,對應電壓為57.3V;第3 個峰值點(即最大功率點)功率值為302.2W,對應最大功率點電壓為87.1V。當處于情況2:光照強度E=300W/m2,S1=0.4、S2=0.3、S3=0.3、T=22.4℃時,光伏陣列P-U輸出特性曲線有兩個峰值點,其中第1 個峰值點的功率值大小為186.6W,對應電壓為54.2V;第2 個峰值點(即最大功率點)功率值為260.2W,對應電壓為83.8V。將仿真前0.05s,光伏陣列所處情況設置為情況1,后0.05s 設置為情況2,分別采用基于IWOA-SVR 與小步長INC 相結合的復合MPPT控制算法與傳統INC 進行仿真對比。兩種算法的仿真結果如圖10 所示。
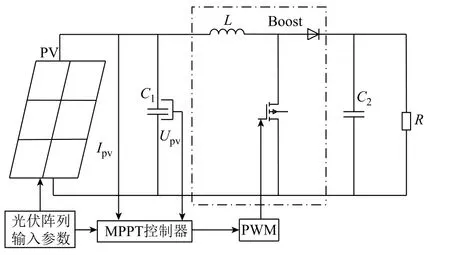
圖9 MPPT 控制系統仿真模型Fig.9 Simulation model of MPPT control system
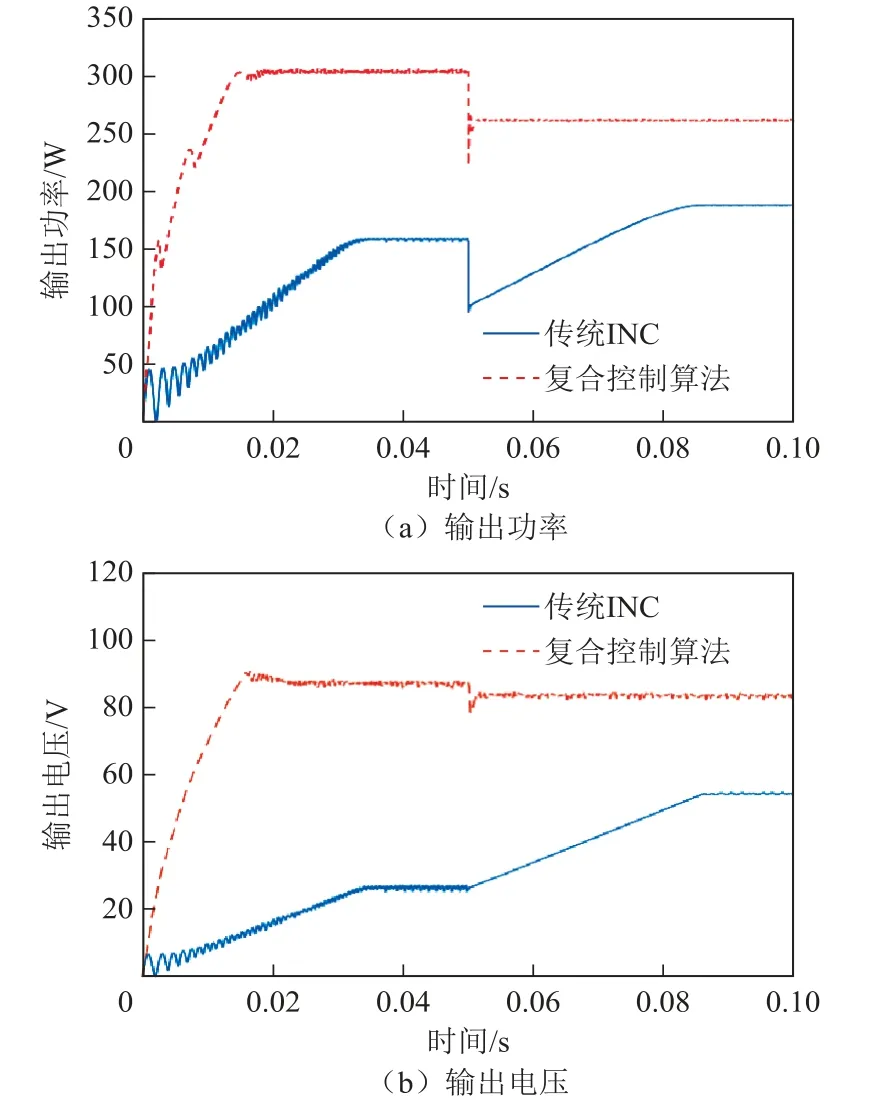
圖10 兩種算法的仿真結果對比Fig.10 Comparison of simulation results
從圖10 可知,在光伏陣列所處環境為情況1 時,傳統INC 未能找到全局最大功率,只找到了第一個極值點,陷入了局部最優,系統經過0.033s 到達穩態,其輸出功率為157W,輸出電壓約為27V,輸出功率誤差率達到了48.1%。當光伏陣列所處環境由情況1 突變為情況2 時,傳統INC 依舊無法追蹤到全局最大功率點,只找到了第一個極值點,系統經過0.036s 穩定追蹤到第一個局部最優點,其輸出功率為186.5W,輸出電壓為54V,輸出功率誤差率達到了28.3%。而本文提出的復合MPPT 控制算法在光伏陣列所處環境突變前,其跟蹤效果很好,可以準確地跟蹤到全局最大功率點,耗時0.015s 系統到達穩態,其輸出功率為300.8W,輸出電壓為86.8V,輸出功率誤差率僅為0.46%。光伏陣列所處環境突變后,復合控制算法只耗時了0.001 25s 就重新追蹤到全局最大功率點,系統達到穩定狀態時,其輸出功率為259.6W,輸出電壓為83.1V,輸出功率誤差率僅為0.31%。綜上,本文提出的復合控制算法在光伏多峰MPPT 控制中能夠準確快速地追蹤到全局最大功率點,相較于傳統INC 在跟蹤速度與精度上有了大幅的提升。
5 結論
光伏陣列處在部分遮擋情況下,其P-U特性曲線具有多個極值點,使得傳統的MPPT 算法極易因誤判而只能找到局部MPP,大幅降低了輸出功率。為了更高效地利用太陽能,本文提出了一種基于改進鯨魚算法優化SVR 與INC 相結合的復合MPPT控制算法。利用改進鯨魚算法優異的尋優性能對SVR 預測模型的c、g參數進行尋優,提高了SVR預測模型的預測準確度。將IWOA-SVR 預測模型與INC 相結合應用到光伏多峰MPPT 控制中,可快速準確地追蹤到GMPP,有效規避陷入局部尋優現象,大幅提高了光伏發電系統的功率輸出與降低跟蹤時間。仿真結果表明:
1)改進的鯨魚算法相較于普通鯨魚算法具有更強的全局搜索與局部開發協調性能。
2)IWOA-SVR 預測模型相對于其他預測模型具有更高的預測精度。
3)IWOA-SVR 與INC 相結合的復合控制算法在光伏多峰MPPT 應用中具備優異的動態與穩態性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19