基于軌跡靈敏度的暫態過電壓兩階段優化控制
2021-05-12 06:26:12王長江劉福鎖陳厚合魯華威
電工技術學報 2021年9期
關鍵詞:優化
王長江 姜 濤 劉福鎖 陳厚合 魯華威
(1. 現代電力系統仿真控制與綠色電能新技術教育部重點實驗室(東北電力大學) 吉林 132012 2. 智能電網保護和運行控制國家重點實驗室南瑞集團(國網電力科學研究院)有限公司 南京 211106)
0 引言
近年來,以風電為代表的新能源發電技術得到快速發展[1-4],大規模風電經高壓直流(High Voltage Direct Currents, HVDC)遠距離輸送到負荷中心時[5-6],若發生受端交流系統短路、直流閉鎖、換相失敗等功率大擾動,將打破直流送端系統的無功平衡,大量盈余無功涌入直流送端系統,易造成直流送端系統的暫態過電壓,引發風機脫網及連鎖反應[7],嚴重威脅交直流混合系統的安全穩定運行[8-10]。因此,抑制直流送端系統暫態過電壓對提高含大規模風電的交直流系統穩定性具有重要意義[11]。
目前,國內外對抑制直流送端系統暫態過電壓的研究,主要集中在增設輔助裝置和優化控制系統兩方面[12-20]。在增設輔助裝置方面,文獻[12-14]分別通過配置動態無功補償器、動態電壓恢復器和調相機等輔助裝置,能在一定程度上補償故障與正常情況的電壓差值,抑制暫態過電壓,規避風機脫網,但會增加系統的投資。在優化控制系統方面,文獻[15]基于時域仿真法,從優化直流系統整流側電流控制環節和低壓限流環節的控制參數來抑制暫態過電壓,該方法計算精度高,能準確、直觀地反映故障后系統的暫態過程,但計算速度較慢,優化過程相對繁瑣;文獻[16]提出一種孤島附加控制策略來改善“風火打捆”特高壓直流系統的頻率和電壓穩定性,可通過改變直流系統功率指令來靈活調節直流功率,進而改善特高壓直流系統的穩定性;文獻[17]在直流閉鎖場景提出一種暫態過電壓的極控(切濾波器)和安控(切機)動作時序協調控制方法,可有效避免“二次壓升”的風險[18];文獻[19-20]分別提出了雙饋風電機組的虛擬阻抗控制方法和直流系統的動態無功支撐控制方法來優化系統的控制性能,抑制暫態過電壓,但增加了控制系統的復雜程度。上述研究從增設輔助裝置和改進系統自身控制的角度出發,可較好地抑制暫態過電壓,但暫態過電壓的動態過程較快,易伴隨風機連鎖脫網等現象,而控制裝置從接收控制指令到裝置動作需要一定延時,很難確保在暫態過電壓動態過程中予以實時抑制。因此需要在故障發生前采取適當的預防控制措施。預防控制可通過調整發電機的機端電壓、變壓器分接頭位置、系統無功補償設備以及網絡參數等措施改變系統的當前運行點,使系統在發生暫態過電壓失穩前將系統關鍵母線電壓控制在合理范圍,有利于避免暫態過電壓失穩引起的大范圍連鎖性電壓失穩或崩潰,提高區域系統整體的穩定性。該方法無需增設額外輔助裝置或引入復雜控制環節,所需控制代價較低[21]。因此開展暫態過電壓的預防控制措施研究,可在保證經濟性的前提下,有效避免直流送端系統暫態過電壓的出現。
國內外學者在電力系統暫態電壓預防控制方面已進行了很多有益探索[22-26]。文獻[22]通過調整發電機出力,使暫態過程中的關鍵母線電壓軌跡運行在安全范圍,但控制措施相對單一,且未考慮其他控制措施對暫態電壓安全的影響;文獻[23]通過穩態運行時的電壓協調控制,可有效預防風電機組在擾動期間的連鎖故障,提高風電場擾動時的安全性;文獻[24]提出了一套考慮快速動態無功補償裝置的二級電壓控制體系,可改善擾動后系統電壓的恢復效果;文獻[25]提出的暫態電壓優化控制模型,通過調整并聯電容器組和變壓器電壓比等控制量,確保暫態電壓快速恢復穩定。由于暫態電壓優化控制模型中包含電力系統的動態過程,需要求解復雜的非線性代數微分方程組,使優化模型的計算效率較低。文獻[26]借助軌跡靈敏度法將暫態電壓優化控制模型轉換為線性規劃模型,并采用啟發式優化求解方法獲得近似最優解,可有效降低優化控制模型的復雜度。雖然現有暫態電壓預防控制可有效地改善暫態電壓的安全性,但缺乏交直流送端系統暫態過電壓的預防控制研究,且控制措施主要采用交流系統的傳統控制元件,忽略了直流和風電等控制元件對暫態電壓的影響。鑒于現有交直流送端系統暫態過電壓預防控制研究匱乏和模型求解復雜的問題,將軌跡靈敏度方法應用到暫態過電壓預防控制,降低暫態過電壓優化控制模型的復雜度。采用直流送端系統暫態過電壓和恢復階段電壓的兩階段優化控制,兼顧直流送端系統恢復過程電壓不安全的風險,改善交直流送端系統的暫態過電壓穩定性。
針對上述問題,本文提出一種基于軌跡靈敏度的暫態過電壓兩階段優化控制方法。首先,分析含大規模風電的交直流送端系統暫態過電壓產生原因,并介紹軌跡靈敏度和模型預測控制(Model Predictive Control, MPC)的基本原理,基于MPC 構建暫態過電壓的兩階段控制模型,借助軌跡靈敏度將暫態過電壓的非線性控制模型轉換為二次規劃模型。然后,針對直流送端系統暫態過電壓失穩場景,在故障發生前求解暫態過電壓預防控制的控制量變化值值,并將控制量變化值施加到交直流系統,避免嚴重的暫態過電壓危害,若控制實施后恢復階段電壓不安全,同理將恢復階段電壓控制的控制量變化值施加到交直流系統的恢復過程,并滾動調節控制量直至暫態過電壓恢復過程運行在安全范圍內。最后,通過修改后IEEE 39 節點系統的仿真分析驗證所提優化控制方法的有效性。
1 暫態過電壓的產生原理
借助大規模風電經HVDC 外送的簡化模型,分析直流送端系統暫態過電壓的產生原理。直流送端系統換流站與風電場之間的無功功率交換示意圖如圖1 所示。
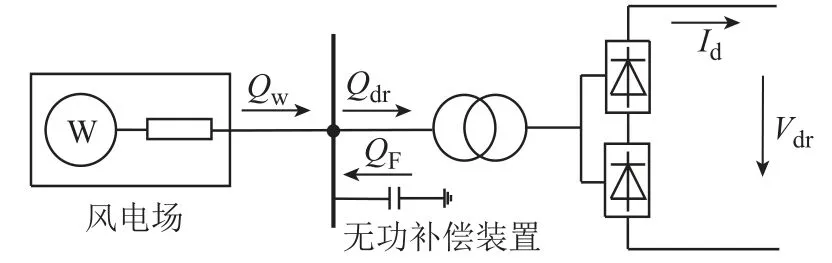
圖1 換流站和風電場無功功率交換示意圖Fig.1 Diagram of reactive power exchange between rectifier station and wind farm
圖1 中,Qdr為換流站吸收的無功,Qw為風電場出口發出的無功,QF為濾波器發出的無功,Id為直流電流,Vdr為整流側直流電壓。整流站和風電場之間的無功平衡關系為

由式(1)可知,Qdr、Qw、QF只有滿足上述無功關系,才能保證整流站與風電場間的無功平衡。當受端交流系統故障導致直流換相失敗后[11](整流側動態過程包括直流側短路、直流電流減小和恢復階段),在直流電流減小階段,直流電流因電流控制超調而低于目標值,甚至降為零,Qdr隨之降低[27]。此時,為滿足無功平衡需減小Qw和QF,而故障后的暫態過程中QF變化較小,近似為穩態值[15];Qw受風電場與整流站間通信延遲的限制而無法及時減小[28],使整流站與風電場之間的無功平衡被打破,導致直流送端產生大量盈余無功,造成直流送端系統的暫態過電壓,可表示為

式中,ΔV為換流母線暫態電壓變化率;Sd為系統短路容量。
由于直流送端系統暫態過電壓發生在直流電流減小階段,一般為故障切除后70~170ms[11],很難在故障切除后及時施加暫態過電壓控制,而且施加控制后有可能引起恢復階段的電壓不安全現象。因此,如何兼顧直流電流減小階段的暫態過電壓失穩和恢復階段的電壓不安全,仍是抑制直流送端系統暫態過電壓急需解決的問題。
2 暫態過電壓的兩階段優化控制
由于直流送端系統暫態過電壓一般發生在故障切除后的幾十毫秒,難以在動態過程中及時給予控制,故可在故障發生前求解暫態過電壓預防控制模型獲得控制量變化值,并施加控制到交直流系統,規避暫態過電壓風險。由于施加預防控制后,有可能引起恢復階段的電壓不安全,需實時監控恢復階段的電壓安全性,若檢測到恢復階段電壓不安全則求解恢復階段電壓控制模型獲得控制量變化值。由于恢復階段的電壓屬于長時間尺度問題,可實施MPC 控制來改善電壓安全性,進而在抑制直流送端系統暫態過電壓的同時,確保恢復階段電壓運行在安全范圍內。同時借助直流送端系統暫態過電壓和恢復階段電壓對控制量的軌跡靈敏度,將非線性控制模型轉換成以控制量增量為獨立優化變量的二次規劃模型,改善模型求解效率。
2.1 交直流系統的軌跡靈敏度
交直流系統軌跡靈敏度可隨時間不斷變化,反映參數微小變化對交直流系統運行狀態的影響[29-30]。電力系統動態過程可表示為

式中,x(t)和x˙(t) 分別為系統狀態變量在時刻t的向量和導數;y(t)為代數變量在時刻t組成的向量;ua、ud和uw分別為交流系統、直流系統和風電場的控制量,u=[uauduw];x0、y0分別為x(t)、y(t)在時刻t0的向量,本文采用Фx(u,t)、Фy(u,t)表示交直流系統狀態變量和代數變量的變化軌跡,即
將x(t)和y(t)在u=u0處進行泰勒級數展開,并忽略控制量增量Δu的高階項,由Δu引起時刻t的狀態變量增量Δx(t)和代數變量增量Δy(t)可近似表示為
式中,xu(t)、yu(t)為x(t)、y(t)關于u的軌跡靈敏度。當Δu足夠小時
由式(6)可知,當系統控制量變化Δu時,可利用軌跡靈敏度求得系統狀態變量和代數變量的變化軌跡。軌跡靈敏度有解析法和攝動法兩種求解方法。針對大規模交直流混合系統結構復雜和方程維數較高的特點,普遍采用攝動法求解軌跡靈敏度,該方法適用于復雜的黑箱系統,無需考慮系統的線性化和網絡拓撲特點,便于得到軌跡靈敏度的近似值,避免了解析法繁瑣的數值積分過程。
采用攝動法計算直流送端系統節點電壓對控制量的軌跡靈敏度,可將控制量的變化區域劃分為Z個離散時間點,第i個離散時間點的直流送端系統節點電壓為Vi,i=1, 2, …,Z。采用式(7)的中心差分、正向差分和反向差分法(本文采用正向差分法)計算直流送端系統電壓對控制量的軌跡靈敏度,并選取靈敏度值較大的控制量作為關鍵控制量。
2.2 模型預測控制的基本原理
直流送端系統動態過程中的直流電流減小(即暫態過電壓)階段時間尺度較短,可在故障發生前施加暫態過電壓優化控制的控制量。然而直流送端系統動態過程中的電壓恢復階段時間尺度較長,可采用MPC 原理在線求解恢復階段電壓優化控制模型和在線實施控制決策,實質為不斷滾動的局部優化和在線控制過程。MPC 原理如圖2 所示,其中,y為被控量;u為控制量;Δu為控制量增量,Δuk+1和Δuk+m-1分別為k時刻預測到的第1 個和第m-1個控制量增量;yr(t)為參考軌跡;yp(t)為預測軌跡;y0(t)為未加控制的實際軌跡;c為被控量的目標值;Ts為采樣周期;m為控制周期數,N為預測周期數,且m≤N;在預測時域[tk,tk+N]內求解優化問題,使控制后的yp(t)接近yr(t),得到控制時域[tk,tk+m-1]內的各控制量。由于實際系統建模不精確以及干擾的存在,將t≥tk的所有控制量施加到系統中可能會進一步增加誤差。因此在tk時刻僅實施控制動作序列的第1 個控制,重復上述過程以實現預測控制。
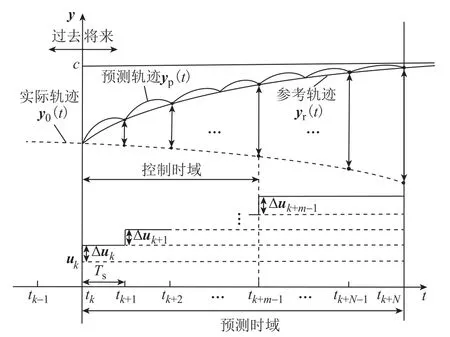
圖2 MPC 原理Fig.2 Principle of MPC
現有非線性MPC 模型的目標函數綜合考慮了各采樣時刻預測軌跡與參考軌跡的偏差和各控制量的控制代價,控制模型為
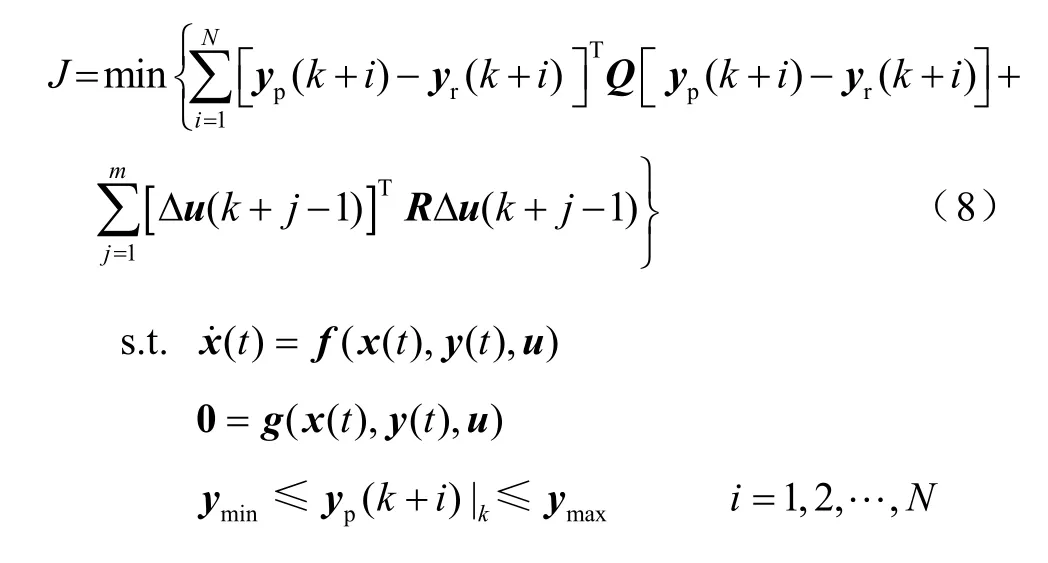
式中,Q和R分別為加權對角矩陣;ymax、ymin分別為被控量的上、下限;umax、umin分別為u的上、下限;Δumax、Δumin分別為Δu的上、下限;j=1,2,… ,m。
由式(8)和式(9)可知,傳統非線性MPC 模型需求解復雜的非線性代數微分方程,其模型求解較為復雜。為簡化控制模型求解來提高預測控制的時效性,可借助2.1 節的軌跡靈敏度法將MPC 模型轉換為二次規劃模型進行求解(可采用求解非線性規劃的一般方法和求解線性規劃的特定解法),大幅降低模型求解的復雜度,快速給定控制元件的動作量來改善暫態電壓穩定性。
2.3 兩階段優化控制模型
實施直流送端系統暫態過電壓預防控制可降低暫態過電壓失穩風險,但有可能出現恢復階段電壓不安全,故需要進行直流送端系統暫態過電壓的兩階段優化控制,即暫態過電壓的預防控制和恢復階段電壓的預測控制。借助2.1 節軌跡靈敏度法,構建直流送端系統暫態過電壓和恢復階段電壓對控制量的軌跡靈敏度,簡化傳統非線性MPC 控制模型,暫態過電壓預防控制和恢復階段電壓預測控制的模型構建過程如下:
1)暫態過電壓的預防控制
直流送端系統暫態過電壓的預防控制,可從降低暫態過電壓幅值和減少暫態過電壓持續時間兩個方面進行。本文主要考慮抑制暫態過電壓幅值,即確保暫態過電壓峰值低于1.1(pu)[31],保證風機不脫網運行,可表示為

式中,Vh.max為節點h的暫態過電壓峰值;tcl為故障清除時刻;tlim為故障清除后到暫態過電壓峰值出現所經歷的時間(文獻[11]提出故障切除后70~170ms出現暫態過電壓,本文取70ms);Vlim=1.1(pu)。
通過改變系統初始運行狀態,使控制后的暫態過電壓峰值低于1.1(pu),避免風機脫網。暫態過電壓預防控制示意圖如圖3 所示,其中y為被控量,Vh.max(0)和Vh.max(1)分別為控制前、后節點h的暫態過電壓峰值。施加暫態過電壓預防控制后若出現恢復階段電壓不安全,可通過2.2 節的MPC思想調節控制量,滾動地實施控制直至電壓恢復到安全水平。
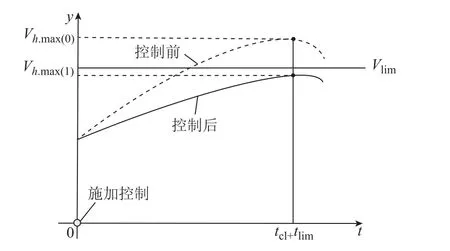
圖3 暫態過電壓預防控制示意圖Fig.3 Schematic diagram of transient overvoltage preventive control
采用2.1 節的交直流系統軌跡靈敏度構建方法,可求取直流送端系統暫態過電壓的軌跡靈敏度As。將式(8)和式(9)的原始非線性MPC 數學模型簡化為以控制量增量為獨立控制變量的二次規劃模型,即
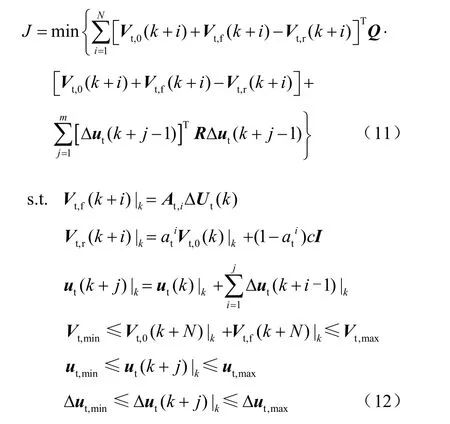
式中,Vt,0、Vt,f和Vt,r分別為暫態過電壓的基準值、變化量和目標值,目標函數的第1 項和第2 項分別為控制措施實施代價和節點電壓預測偏差的懲罰;At為直流送端系統暫態過電壓Vt對控制量的軌跡靈敏 度 矩 陣,可 表 示 為其中Q(o)、VF(p)、kT(q-r)、PH和PW均為暫態過電壓控制量,分別代表節點o的電容器無功功率、節點p的發電機機端電壓參考值、節點q與節點r之間變壓器電壓比、直流輸電系統的有功功率和雙饋風電場的有功功率;ΔUt為所有控制時刻暫態過電壓變化量的矩陣;at為設計參數可調節參考軌跡趨近目標值c的快慢程度;I為單位向量;ut和Δut分別為暫態過電壓的控制量和控制量的變化量,ut,max、ut,min分別為ut的上、下限,Δut,max、Δut,min分別為Δut的上、下限;Vt,max、Vt,min分別為直流送端系統暫態過電壓的上、下限。
由于直流送端系統暫態過電壓的動態過程較短,無法直接實施預測控制,可在系統故障前調整控制元件的動作量來預防控制暫態過電壓發生。
2)恢復階段電壓的預測控制
在對暫態過電壓進行預防控制的同時,若恢復階段電壓不安全,可采用相同原理構建恢復階段電壓的二次規劃模型,實現恢復階段電壓的預測控制。
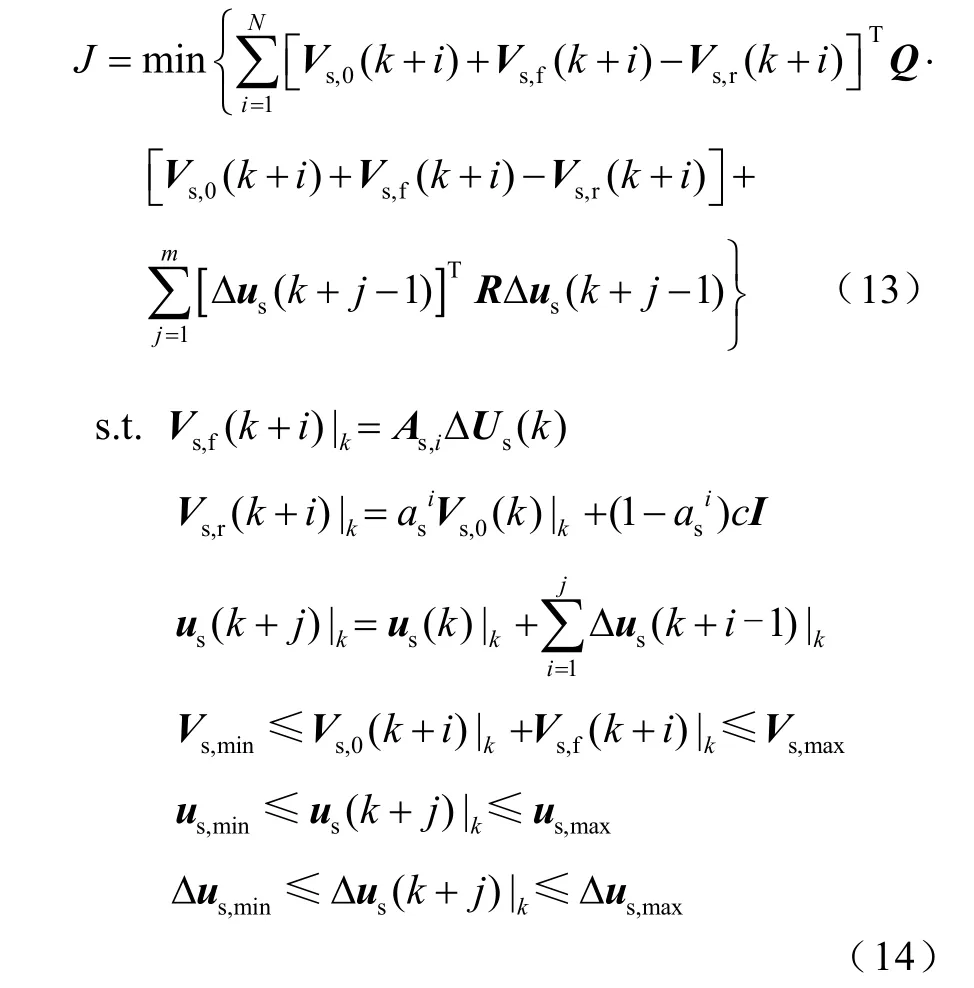
式中,Vs,0、Vs,f和Vs,r分別為恢復階段電壓基準值、變化量和目標值;As為直流送端系統恢復階段電壓Vs對控制量的軌跡靈敏度矩陣,可表示為As=[?Vs/?Q(o)?Vs/?VF(p)?Vs/?kT(q-r)?Vs/?PH?Vs/?PW];ΔUs為恢復階段所有控制時刻電壓增量組成的矩陣;as為恢復階段電壓控制的設計參數;us和Δus分別為恢復階段電壓的控制量和控制量的變化量;us,max、us,min分別為us的上、下限;Δus,max、Δus,min分別為Δus的上、下限;Vs,max、Vs,min分別為恢復階段電壓的上、下限。
通過恢復階段電壓的預測控制,可使直流送端系統規避暫態過電壓失穩風險的同時,確保后期恢復階段電壓運行在安全范圍內。
2.4 控制元件選取
控制元件的選取原則是在直流送端系統暫態過電壓預防控制和恢復階段電壓預測控制階段,分別根據直流送端系統暫態過電壓和恢復階段電壓對控制量的軌跡靈敏度確定控制元件投入順序。當施加某種控制措施后電壓未滿足要求,則采用其他控制措施進行協調控制。具體方法如下:
(1)設被控節點為直流送端系統節點h,通過時域仿真得到該節點在tk+1時刻的暫態過電壓預測值和目標值
(2)根據被控節點h暫態過電壓對控制量的軌跡靈敏度和控制元件的最大投入量,計算tk+1時刻節點h的暫態過電壓最大控制量ΔVt(k+1)為

式中,ΔVt,j(k+1)為ΔVt(k+1)的第j個元素;Δut,jmax為暫態過電壓預防控制中第j個控制元件的最大投入量;At,hj為節點h暫態過電壓對控制量j的軌跡靈敏度,,其中Δut,j為暫態過電壓預防控制中第j個控制元件的變化量,和分別為控制量j實施前、后的暫態過電壓幅值。
(3)設置控制元件可投入的最大臺數,按ΔVt(k+1)中元素由大到小的順序依次投入,若M(小于最大臺數)個控制元件動作后,暫態過電壓達到目標值則根據式(16)確定待投入控制元件數目。

(4)若某種控制元件投入極限臺數后,系統暫態過電壓未滿足要求,則根據軌跡靈敏度由大到小的順序依次投入其他控制元件,選取方法相似。
(5)若施加控制后恢復階段電壓不安全,則進行恢復階段電壓控制,計算恢復階段電壓不安全節點h對控制量的軌跡靈敏度,并結合式(17)和式(18)選取控制元件,具體實施方法與上文類似,本文不再贅述。
式中,ΔVs,j(k+1)為tk+1時刻節點h恢復階段電壓最大增量ΔVs(k+1)的第j個元素;As,hj為恢復階段電壓不安全節點h對控制量j的軌跡靈敏度;Δus,jmax為控制中第j個控制元件的最大投入量為按從大到小排序后的第j個元素;和分別為恢復階段電壓的預測值和目標值。
2.5 優化控制流程
基于軌跡靈敏度的暫態過電壓兩階段優化控制流程如圖4 所示。
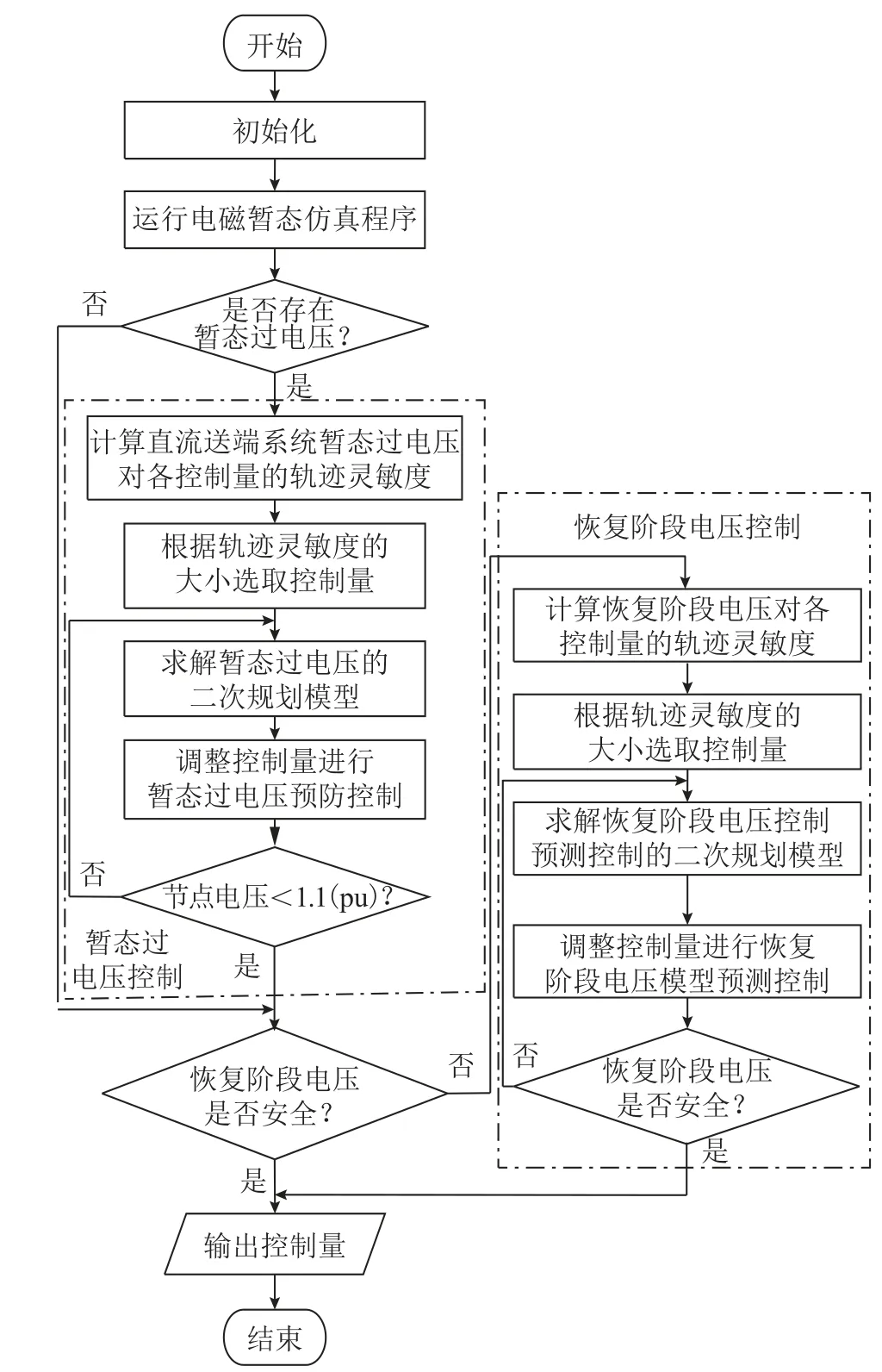
圖4 兩階段優化控制流程Fig.4 Flow chart of two-stage optimization control
暫態過電壓兩階段優化控制的具體步驟如下:
(1)初始化。設置故障發生和切除時刻,MPC模型參數以及電磁暫態仿真參數。
(2)運行電磁暫態仿真程序。基于電磁暫態仿真得到系統軌跡,計算直流送端系統暫態過電壓對各控制量的軌跡靈敏度,根據軌跡靈敏度大小選取控制量。
(3)由式(11)和式(12)將傳統MPC 模型轉換為暫態過電壓預防控制的二次規劃模型,并在初始時刻將控制量施加到系統中進行電磁暫態仿真。
(4)判斷直流送端系統暫態過電壓幅值是否小于1.1(pu),若未滿足,則在下一個控制周期到來時重復步驟(2)和步驟(3)。若滿足,則判斷恢復階段電壓是否運行在安全范圍內;若是,則仿真結束,輸出最優控制序列;否則,繼續運行步驟(5)。
(5)計算恢復階段電壓不安全節點對各控制量的軌跡靈敏度,根據軌跡靈敏度大小選取控制量。
(6)按式(13)和式(14)將傳統MPC 模型轉換為恢復階段電壓預測控制的二次規劃模型進行求解,并將所得控制序列的第一個優化控制量施加到交直流系統實施滾動優化控制。
(7)判斷直流送端系統恢復階段電壓是否安全,安全則仿真結束,輸出最優控制序列;否則,在下一個控制周期轉到步驟(6)。
3 算例分析
本節以修改后IEEE 39 節點系統為例進行仿真分析。在節點37 接入360 臺1.5MW DFIG(采用單機等效模型模擬雙饋風電場[32]);在節點2 和節點25 間加入CIGRE 500kV 雙極HVDC 輸電系統[33]。借助 Simulink/Matlab 搭建仿真模型,仿真步長為5×10-5s(仿真計算機配置:CPU:Core i7-8550U,主頻1.80GHz,內存8.00GB)。發電機采用4 階模型,各發電機上均裝設電壓調節器,勵磁系統采用4 階模型,負荷采用恒阻抗負荷模型。預測控制模型的初始參數可參考文獻[34]。
3.1 暫態過電壓的仿真分析
在交直流受端系統節點2 發生三相短路故障,故障開始時刻為8s,故障持續時間為0.1s。未施加控制時的直流送端系統節點25 電壓曲線如圖5 所示。
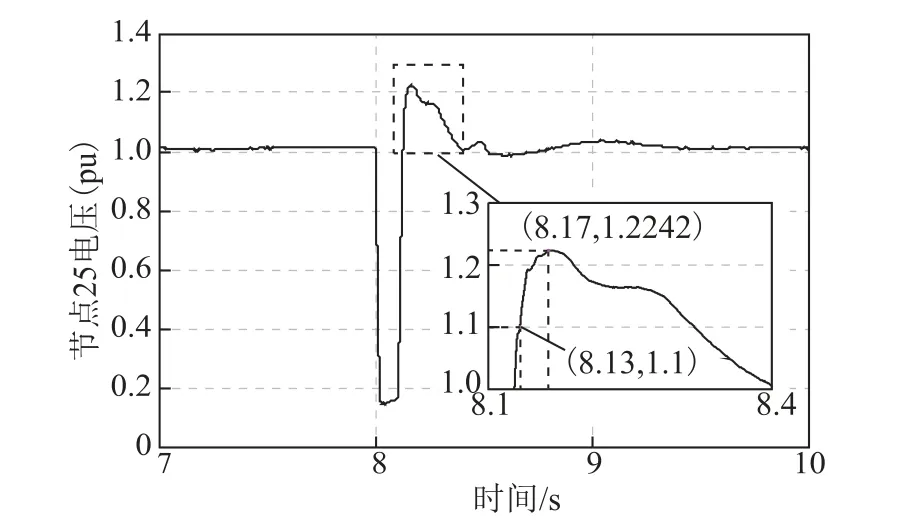
圖5 未施加控制時節點25 電壓曲線Fig.5 Bus 25 voltage curve without control
由圖5 可知,在t=8.1s 故障清除后,交直流送端系統節點25 的電壓逐漸上升,若不施加任何控制,在t=8.13s 時電壓值達到1.1(pu),節點25 開始出現暫態過電壓現象,并在t=8.17s 時暫態過電壓達到最大,暫態過電壓峰值為1.224 2(pu)。
3.2 暫態過電壓的預防控制
采用所提控制措施對直流送端系統暫態過電壓進行預防控制,在t=0s 時預防控制動作對系統實施電壓控制,以保證節點25 電壓在1.0(pu)~1.10(pu)的范圍內。本文借助暫態過電壓對各控制量的軌跡靈敏度選取關鍵控制元件。為說明軌跡靈敏度用于暫態過電壓預防控制的準確性,以節點20 的電容器為例進行仿真分析,電容器容量與暫態過電壓峰值的對應關系如圖6 所示。
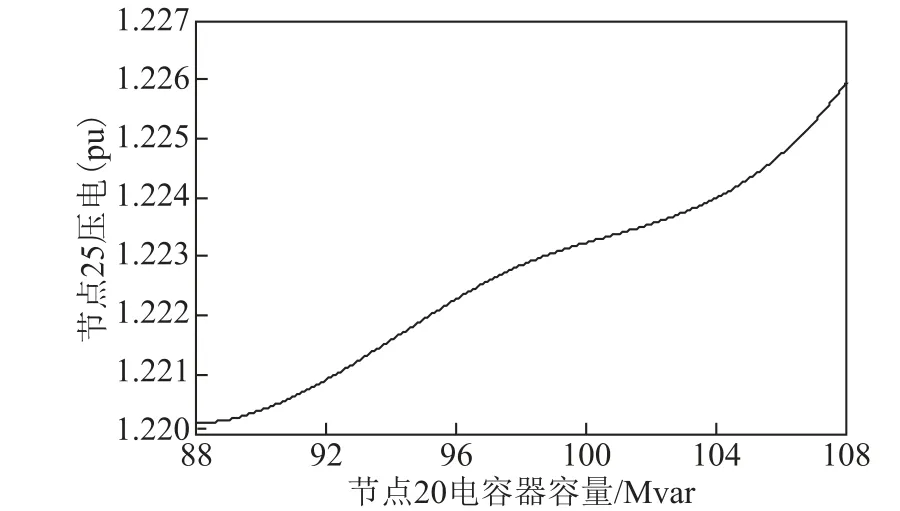
圖6 電容器容量對暫態過電壓的影響Fig.6 Effect of capacitor capacity on transient overvoltage
由圖6 可知,節點20 所連電容器容量在區間[88Mvar,108Mvar]變化時,與暫態過電壓峰值的靈敏度呈線性變化,而在暫態過電壓預防控制中節點20 所連電容器的變化區間為92~103Mvar,均在靈敏度的線性區間,進而證明將軌跡靈敏度應用于暫態過電壓預防控制的可行性和準確性。
節點25 暫態過電壓對各控制量的軌跡靈敏度如圖7 所示。由靈敏度大小確定參與控制的元件為:節點4、20、27、28、29 的電容器,節點30、32、35、38、39 的勵磁調節器,變壓器2-30、29-38、6-31、10-32、21-33,直流輸電系統和雙饋風電機組。其中,電容器每次優化的最大控制變化量為10Mvar,最大控制量為20Mvar,每次優化最多動作臺數為5 臺;發電機機端電壓每次優化的最大控制變化量為0.04(pu),最大控制量為0.06(pu),每次優化最多動作臺數為5 臺;變壓器電壓比每次優化的最大控制變化量為0.005(pu),最大控制量為0.006 7(pu),每次優化最多動作臺數為5 臺;HVDC 系統傳輸的有功功率每次優化的最大控制變化量為70MW,最大控制量為100MW;風電場有功功率每次優化的最大變化量為30MW,最大控制量為45MW。
由圖7 可知,節點25 暫態過電壓峰值對變壓器電壓比kT和發電機機端電壓參考值VF的軌跡靈敏度,較HVDC 系統傳輸的有功功率PH、風電場的有功功率PW和電容器無功功率Q的軌跡靈敏度大,即kT和VF對節點25 暫態過電壓峰值的影響程度較PH、PW、Q高。因此在施加控制時,優先投入kT和VF,若未滿足控制要求再依次投入PH、PW和Q。
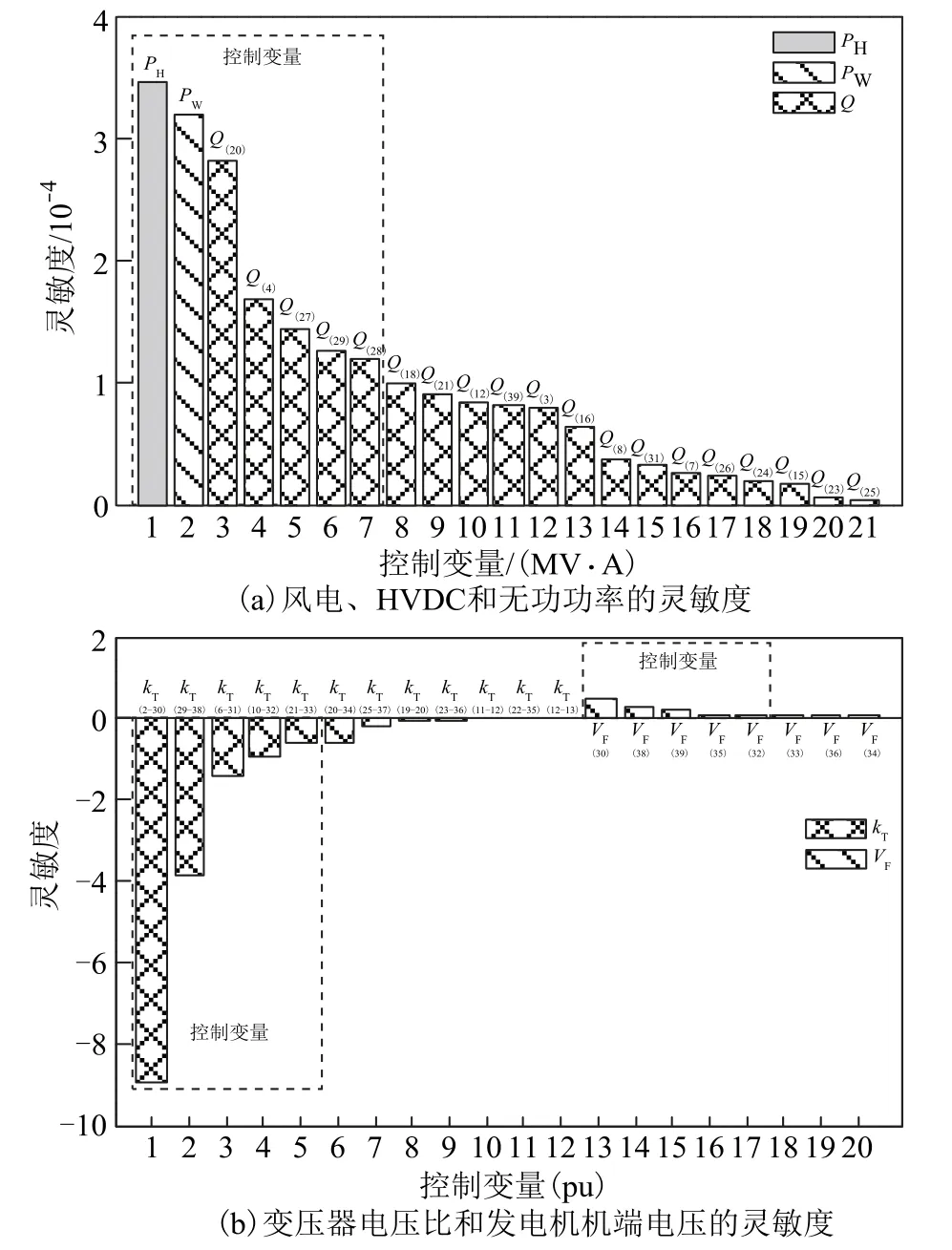
圖7 節點25 暫態過電壓峰值對控制量的軌跡靈敏度Fig.7 Trajectory sensitivity of bus 25 transient overvoltage peak to selected control quantity
經直流送端系統暫態過電壓預防控制后的控制量變化值情況見表1。將各控制量施加到交直流系統后,可得直流送端系統節點25 電壓的曲線如圖8所示。
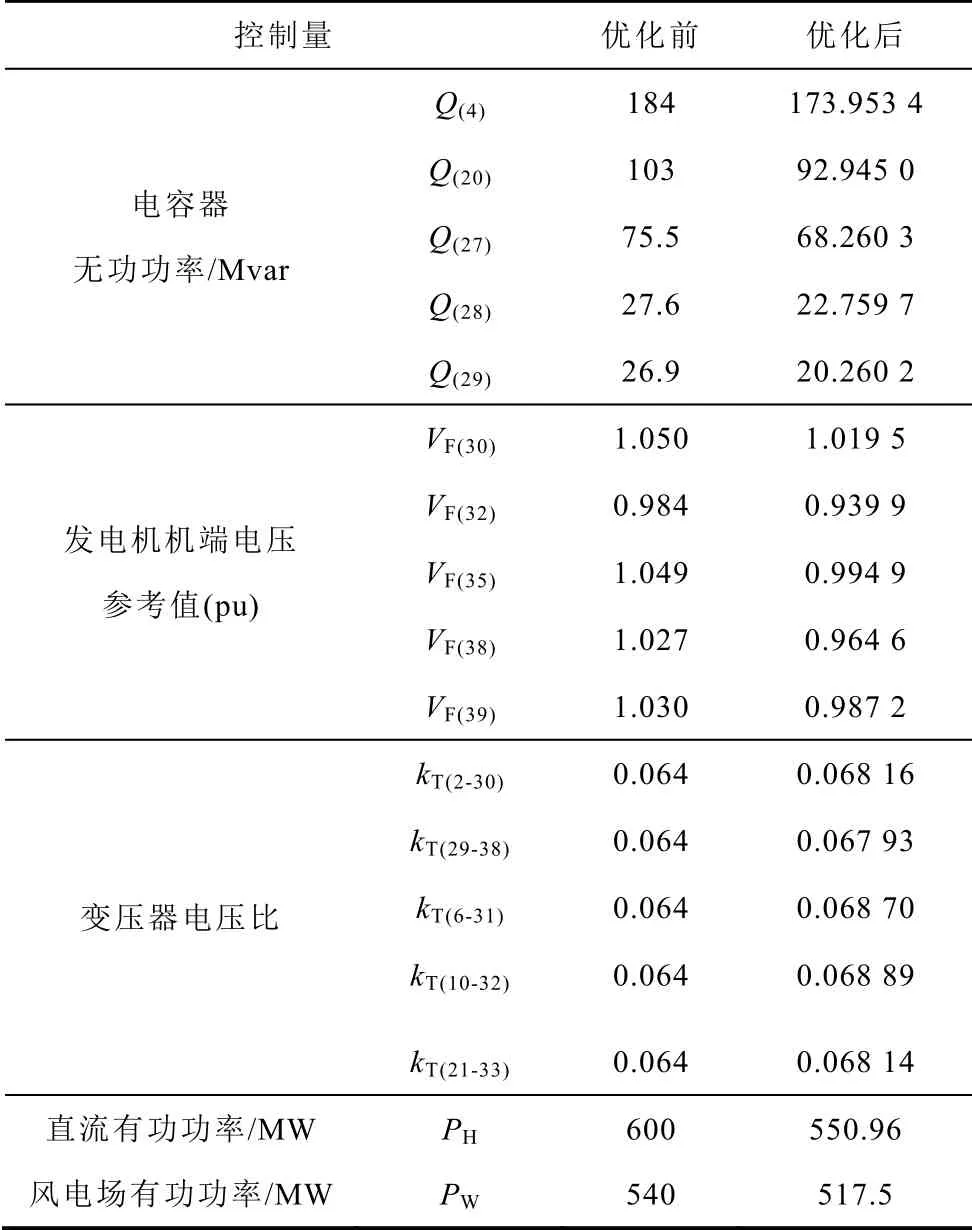
表1 暫態過電壓預防控制的控制量變化值情況Tab.1 Values of control variables after transient overvoltage prevention control
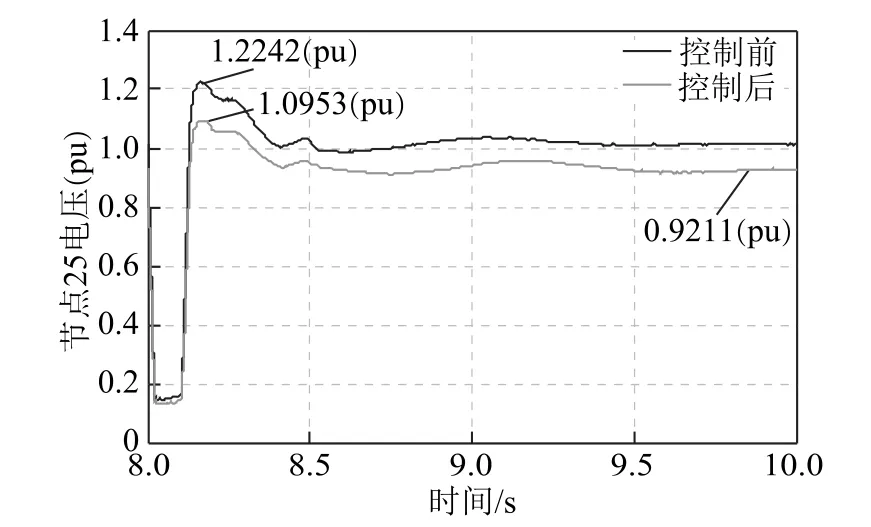
圖8 施加預防控制后節點25 電壓曲線Fig.8 Bus 25 voltage curve with prevention control
由圖8 可知,將預防控制施加到交直流混合系統后,節點25 的暫態過電壓峰值由1.224 2(pu)降到1.095 3(pu),即將暫態過電壓峰值限制在1.1(pu)以下,避免風機脫網風險,由此可驗證本文所提方法的有效性。交直流系統部分節點暫態過電壓峰值見表2。
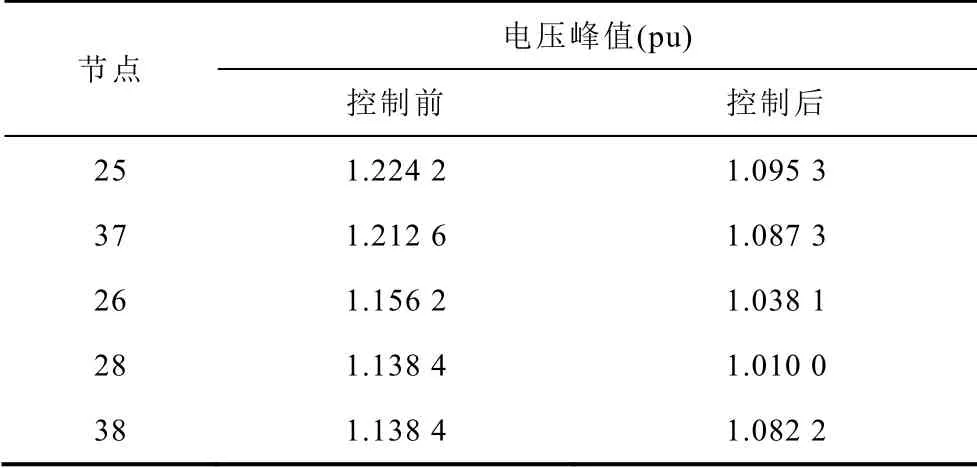
表2 其他節點的暫態過電壓峰值Tab.2 Transient overvoltage peak of other nodes
由表2 可知,在直流送端系統暫態過電壓最嚴重的節點25 進行預防控制后,交直流系統的暫態過電壓現象得以消除,進一步驗證所提方法的可行性。
3.3 恢復階段電壓的預測控制
由3.2 節的圖8 可知,在直流送端系統施加暫態過電壓的預防控制后,節點25 的恢復階段電壓跌落至0.921 1(pu),超出電壓的安全運行范圍。需啟動本文所提直流送端系統恢復階段電壓預測控制,以確保節點25 的恢復階段電壓運行在安全范圍內。同樣由節點25 的恢復階段電壓對各控制量的軌跡靈敏度大小,確定參與控制的元件為節點27、12、20、23、31 的電容器,節點30、38、39、32、26 的勵磁調節器,變壓器2-30、25-37、29-38、21-33、22-35,直流輸電系統和雙饋風電機組。控制元件的最大投入量確定方法同3.2 節,而且控制元件施加順序依然是優先投入kT和Vref,若未滿足控制要求,再依次投入PH、PW和Q。將暫態過電壓恢復階段預測控制方法與基于準穩態方程的非線性 MPC(Nonlinear Model Predictive Control, NLMPC)[35]方法進行對比分析。為保證其可比性,選取相同的控制量,經交直流送端系統恢復階段電壓預測控制模型的優化求解,獲得兩種優化控制方法下第1 個控制周期各控制量的變化量見表3。
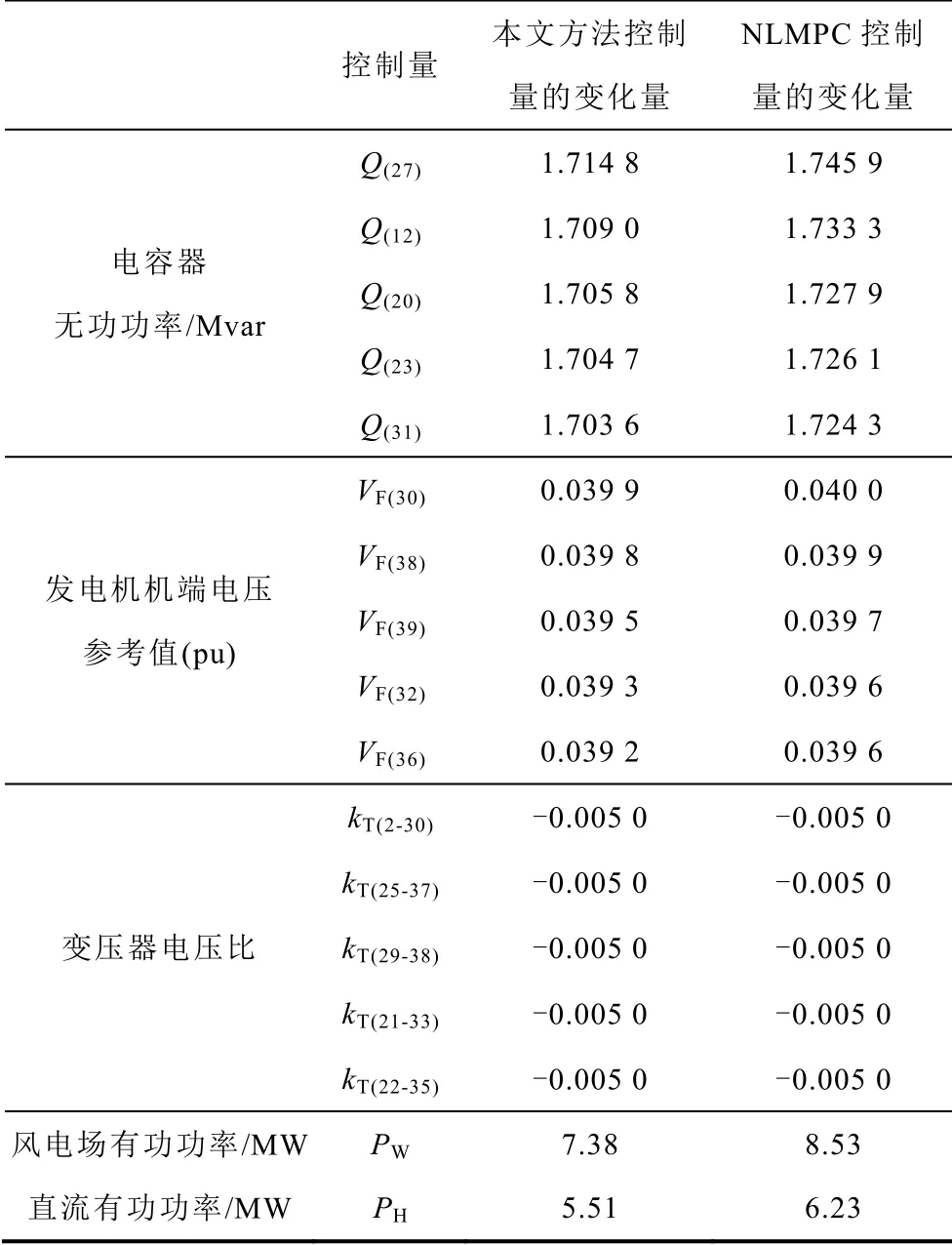
表3 第1 個控制周期各控制量的變化量Tab.3 Variation of each control variable in the first control period
借助電磁暫態仿真來模擬預測控制的實時滾動優化控制效果,并對比分析未施加任何控制、施加暫態過電壓預防控制、施加恢復階段電壓第1 次控制時的直流送端系統節點25 的電壓變化情況。在t=11s時,將預測控制模型優化求解的第1 控制周期各控制量施加到交直流系統,得到施加第1 次控制后直流送端系統節點25 的電壓曲線如圖9 所示。而本文方法與NLMPC 的電壓曲線變化如圖10 所示。
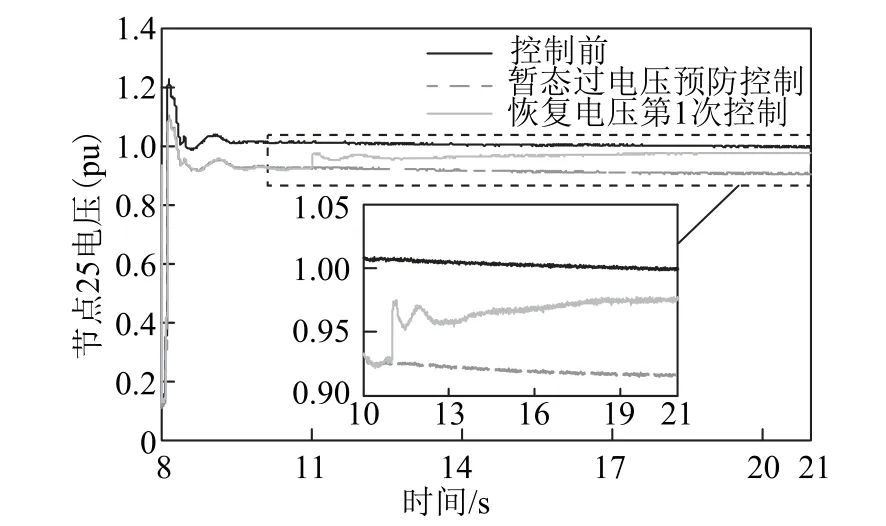
圖9 第1 次控制后節點25 電壓Fig.9 Voltage of node 25 after the first control
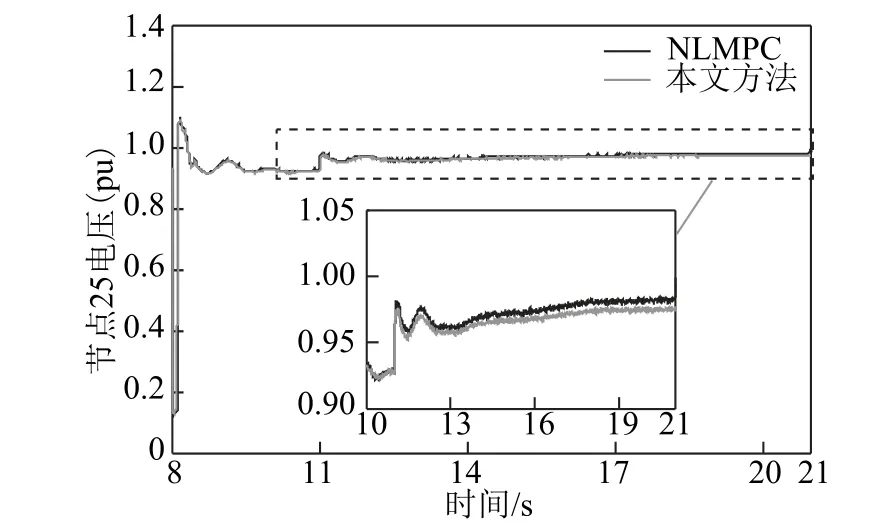
圖10 不同控制方法的電壓曲線Fig.10 Voltage curves of different control methods
由圖9 和圖10 可知,本文所提恢復階段電壓預測控制在t=11s 時將第1 周期控制量施加到交直流系統,節點25 的恢復階段電壓值由0.921 1(pu)提高到0.973 8(pu),經NLMPC 控制后恢復階段電壓由0.921 1(pu)提高到0.975 2(pu),預測結果具有更高的準確性。在優化時間方面,本文方法的優化時間為1.093s,而NLMPC 需在預測時域內反復進行時域仿真求取最優控制序列,其優化控制求解速度較慢。綜上,由于兩種方法第1 周期控制均未使恢復階段電壓達到1.0(pu),都需要進行第2 周期控制。進一步通過恢復階段電壓預測控制模型的優化求解,獲得第2 個控制周期各控制量的變化量,見表4。
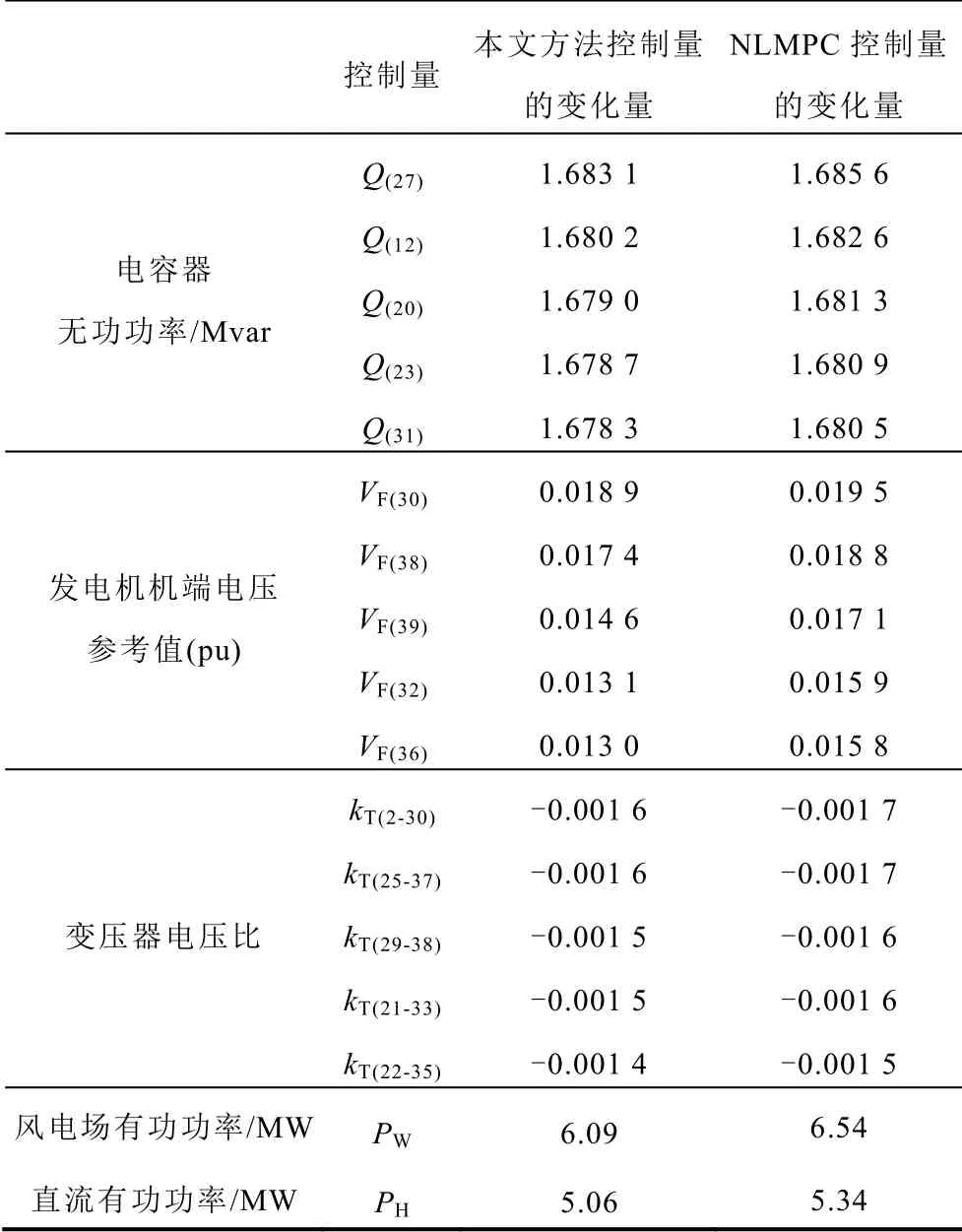
表4 第2 個控制周期各控制量的變化量Tab.4 Variation of each control variable in the second control period
當t=21s 時將預測控制模型優化求解的第2 控制周期各控制量施加到系統中,獲得本文方法在第2 次控制后節點25 的電壓曲線,如圖11 所示。本文方法與NLMPC 的電壓曲線變化如圖12 所示。
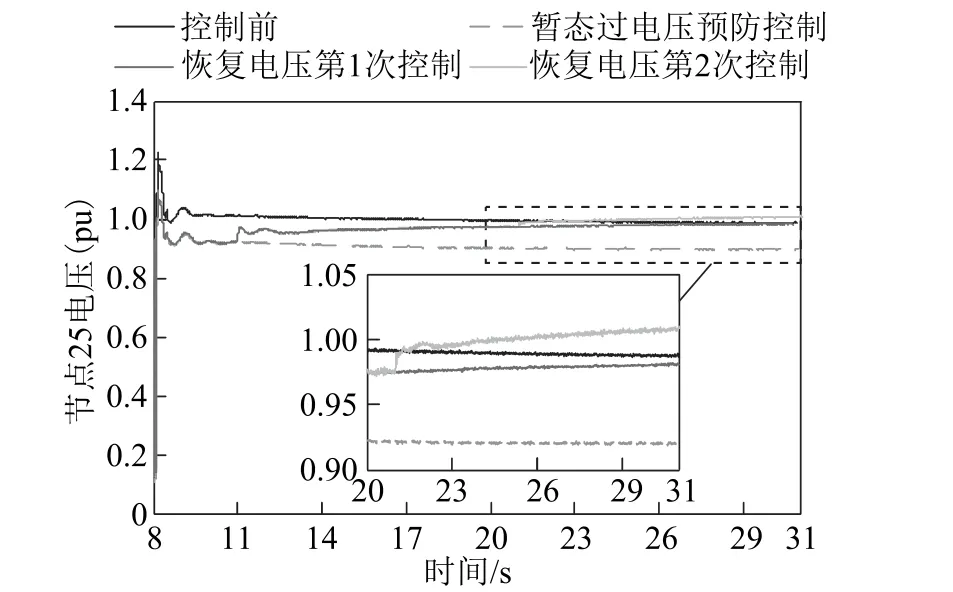
圖11 第2 次控制后節點25 電壓Fig.11 Voltage of node 25 after the second control
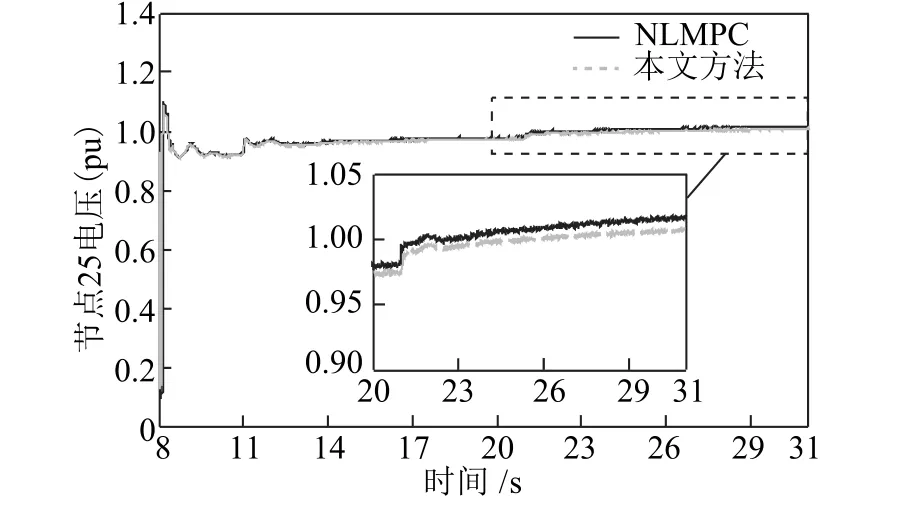
圖12 不同控制方法的電壓曲線Fig.12 Voltage curves of different control methods
由圖11 和圖12 可知,本文方法可使節點25 恢復階段電壓值由0.973 8(pu)提升到1.009 8(pu),優化時間為1.091s。LMPC 可將節點25 恢復階段電壓值由0.975 2(pu)提升到1.011 5(pu)。可見兩種方法都可使預測電壓達到目標值,即本文所提預測控制方法可使恢復階段電壓運行在安全范圍內,進而驗證所提方法的有效性。
進一步對比分析施加恢復階段電壓預測控制后,直流送端系統其他節點恢復階段電壓值的變化情況見表5。
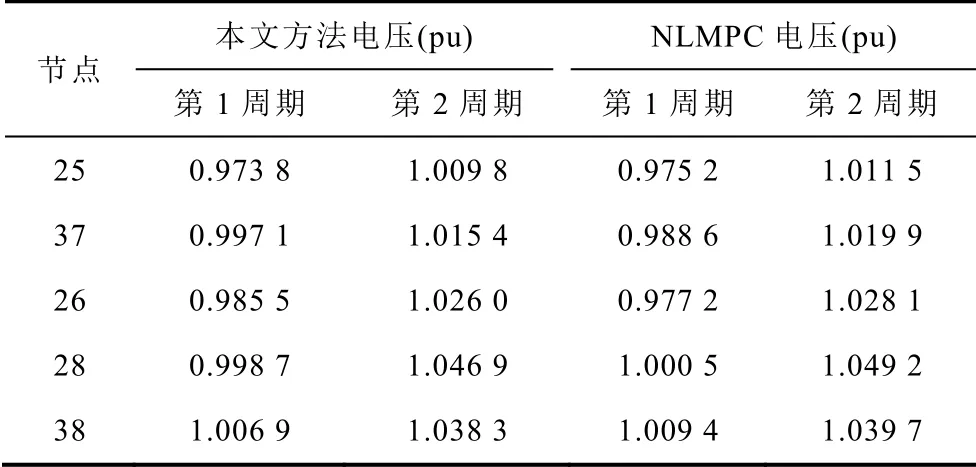
表5 其他節點的恢復階段電壓Tab.5 Recovery voltage of other nodes
由表5 可知,將第1 周期控制量施加到系統后,兩種優化控制方法節點25、37、26 的恢復階段電壓仍低于1.0(pu),未達到預期控制目標值。第2 周期控制量施加到系統后,所有節點的電壓均在1.0(pu)以上,達到預期電壓控制效果,且本文方法恢復階段電壓預測控制的平均優化時間為 1.092s,相比NLMPC 方法可大幅度減少優化求解所需時間,由此進一步驗證所提控制方法的有效性。
4 結論
本文提出一種基于軌跡靈敏度的暫態過電壓兩階段優化控制方法。通過修改后IEEE 39 節點系統的算例分析可知,借助直流送端系統暫態過電壓和恢復階段電壓對控制量的軌跡靈敏度,將傳統MPC優化模型轉換為以控制量增量為獨立變量的二次規劃模型,與NLMPC 方法相比具有較快的模型求解速度,并充分發揮直流和風電有功控制量對暫態過電壓和恢復階段電壓的調節作用。
在暫態過電壓兩階段優化控制中,直流送端系統暫態過電壓預防控制能將暫態過電壓峰值限制在1.1(pu)以下降低風機脫網風險,恢復階段電壓的預測控制可將恢復階段電壓不安全節點調整到電壓安全范圍1.0(pu)附近,從而兼顧直流送端系統暫態過電壓和恢復階段電壓的安全穩定性,可為調度人員的暫態電壓穩定控制提供參考。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45