跨尺度代價(jià)聚合網(wǎng)絡(luò)
2021-05-13 07:16:02黃怡潔周佩朱江平張建偉
現(xiàn)代計(jì)算機(jī) 2021年8期
黃怡潔,周佩,朱江平,張建偉
(四川大學(xué)計(jì)算機(jī)學(xué)院,成都610065)
0 引言
雙目立體匹配是計(jì)算機(jī)視覺領(lǐng)域非常重要的課題,其關(guān)鍵在于找到雙目立體圖像對中像素點(diǎn)的相關(guān)性,根據(jù)三角測量原理計(jì)算出視差,根據(jù)視差計(jì)算出目標(biāo)的深度信息。立體匹配可廣泛應(yīng)用與增強(qiáng)現(xiàn)實(shí)[1]、三維建模[2],以及機(jī)器智能[3]等領(lǐng)域。
傳統(tǒng)的立體匹配算法包含代價(jià)聚合、視差計(jì)算、視差優(yōu)化和視差后處理[4]四個(gè)步驟完成。近些年,很多基于卷積神經(jīng)網(wǎng)絡(luò)[5]的立體匹配算法取得較好的效果。雙目立體圖像對作為網(wǎng)絡(luò)的輸入,通過端到端的神經(jīng)網(wǎng)絡(luò),可以直接預(yù)測出一張視差圖。Zbontar 等人[6]提出使用塊匹配結(jié)合卷積神經(jīng)網(wǎng)絡(luò)計(jì)算匹配代價(jià),且在代價(jià)聚合模塊融入半全局的方法,有助于減少遮擋區(qū)域的誤差;Kendall 等人[7]在提取特征的時(shí)候,融入幾何信息,構(gòu)建4D 的匹配代價(jià)集,代價(jià)聚合網(wǎng)絡(luò)中用3D 卷積進(jìn)行多尺度特征融合,提高匹配的精度;Jie Zequn 等人[8]用遞歸的左右一致性檢查模型,該模型在視差計(jì)算階段就可進(jìn)行視差一致性檢查;Khamis[9]在使用Siamese 提取特征,網(wǎng)絡(luò)先預(yù)測出低分辨率的視差圖,再以色彩輸出為導(dǎo)向,產(chǎn)生高精度的視差圖;李航等人[10]提出沿著通道以及空間維度聚合特征信息,將3D 殘差以及密集模塊融入代價(jià)聚合網(wǎng)絡(luò);馬偉等人[11]使用CNN 提取圖像特征并進(jìn)行區(qū)域分割,再用CNN匹配結(jié)果構(gòu)建MRF 能量函數(shù),最后通過優(yōu)化能量函數(shù)計(jì)算視差;王玉峰等人[12]采用寬步長將右特征圖進(jìn)行平移結(jié)構(gòu)建稀疏三維損失體,并結(jié)合兩種損失函數(shù)訓(xùn)練模型。盡管以上算法取得了較好的效果,但在弱紋理區(qū)域仍然存在誤匹配的問題,且3D 卷積的計(jì)算消耗過大,對實(shí)時(shí)性能有所影響。
因此,本文提出了跨尺度代價(jià)聚合網(wǎng)絡(luò)(CSSN),在特征提取模塊,使用筆者在之前研究當(dāng)中的注意力模塊,提取包含豐富語句信息的特征,將左右圖像的特征圖進(jìn)行相關(guān)性操作,構(gòu)建3D 的匹配代價(jià)集,在代價(jià)聚合網(wǎng)絡(luò)部分,將不同尺度的匹配代價(jià)集進(jìn)行融合產(chǎn)生低分辨率的視差圖,再經(jīng)過殘差模塊進(jìn)行視差優(yōu)化,生成了最終的視差圖,減少了弱紋理區(qū)域的誤匹配問題,在KITTI[13-14]數(shù)據(jù)集上取得較好的效果。
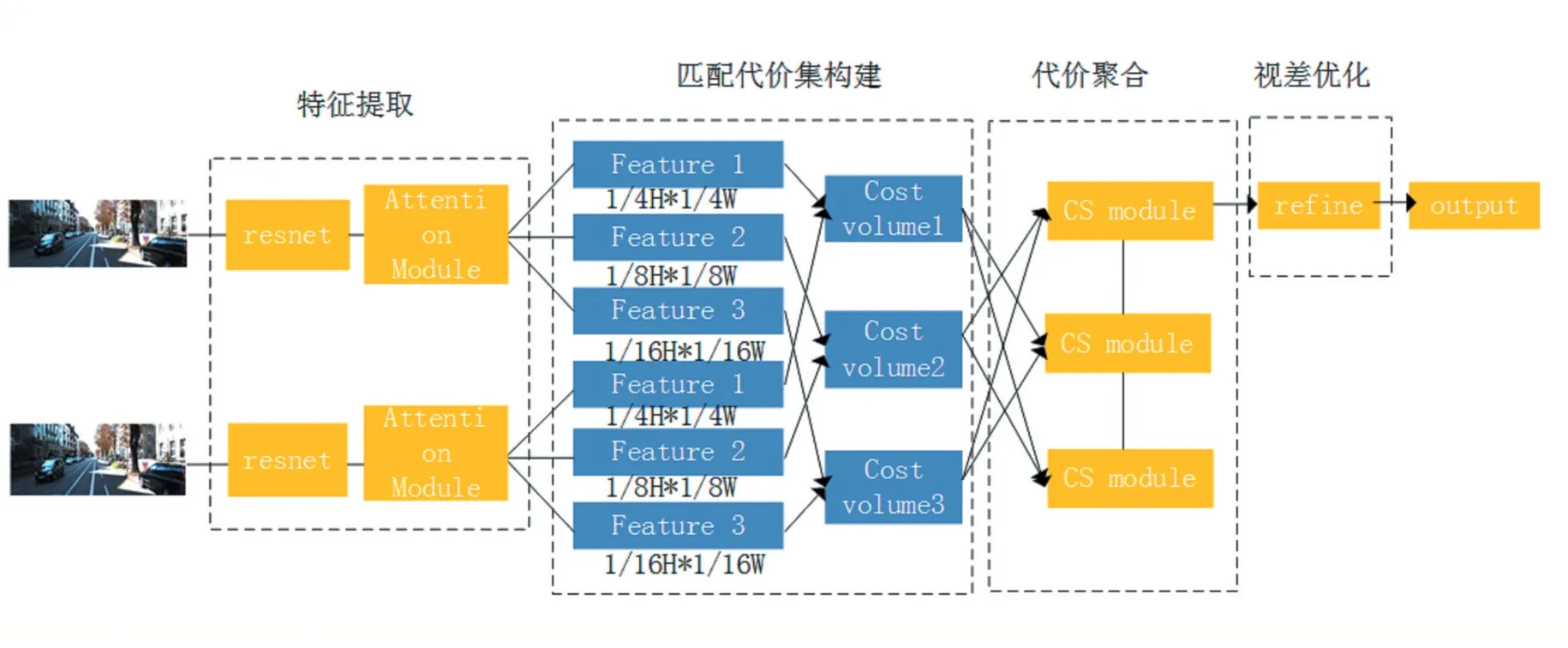
圖1 跨尺度代價(jià)聚合網(wǎng)絡(luò)結(jié)構(gòu)
1 跨尺度代價(jià)聚合網(wǎng)絡(luò)(CSSN)
1.1 網(wǎng)絡(luò)結(jié)構(gòu)
由于弱紋理區(qū)域包含的信息較少,需要通過下采樣提取到包含有效信息的特征,而在網(wǎng)絡(luò)的深層細(xì)節(jié)信息的感知較差,因此大尺度的特征恢復(fù)空間細(xì)節(jié)信息,因此,代價(jià)聚合網(wǎng)絡(luò)進(jìn)行跨尺度的匹配代價(jià)集的聚合,可以預(yù)測出更加準(zhǔn)確的視差圖。本文網(wǎng)絡(luò)主要分為四個(gè)部分,特征提取、匹配代價(jià)集構(gòu)建、跨尺度代價(jià)聚合以及視差優(yōu)化。網(wǎng)絡(luò)結(jié)構(gòu)如圖1 所示。
特征提取網(wǎng)絡(luò):特征提取網(wǎng)絡(luò)中先用殘差模塊,將圖像分別下采樣到1/4H*1/4W、1/8H*1/8W、1/16H*1/16W,提取不同尺度的特征,并在第三個(gè)殘差模塊后加入筆者在之前研究中使用的注意力機(jī)制模塊,提取包含豐富語境特征的信息。細(xì)節(jié)將在1.2 小節(jié)當(dāng)中介紹匹配代價(jià)集構(gòu)建:將左右圖像提取的多尺度特征分別進(jìn)行相關(guān)性操作,構(gòu)建3D 匹配代價(jià)集,其大小為D*H*W。建立三個(gè)不同尺度的匹配代價(jià)集,用于跨尺度代價(jià)聚合。
跨尺度代價(jià)聚合:代價(jià)聚合階段的特征需要包含空間細(xì)節(jié)信息且在弱紋理需要采樣得到更多的信息,因此進(jìn)行不同尺度的代價(jià)聚合。首先將匹配代價(jià)集采樣到與其他匹配代價(jià)集相同的尺度,再通過卷積操作進(jìn)行融合,生成三個(gè)低分辨率的視差圖,將在1.4 小節(jié)中詳細(xì)介紹。
視差優(yōu)化:將代價(jià)聚合網(wǎng)絡(luò)中低分辨率的視差圖上采樣,并利用殘差模塊,產(chǎn)生與輸入圖像相同尺度的視差圖,進(jìn)一步提高了視差預(yù)測的精度。
1.2 特征提取網(wǎng)絡(luò)
由于在弱紋理區(qū)域、遮擋區(qū)域等信息較少,易發(fā)生誤匹配的問題,因此,提取的特征中包含豐富的上下文語境信息至關(guān)重要,本文在特征提取網(wǎng)絡(luò)使用了改進(jìn)的ResNet50[15]提取局部特征以及筆者之前提出的注意力機(jī)制模塊,從空間維度和通過維度分別捕獲語境信息。注意力模塊由通道和空間注意力模塊組成,通道注意力模塊學(xué)習(xí)通道圖之間的相關(guān)性,增強(qiáng)了特征圖之間的依賴關(guān)系;空間注意力模塊某位置的特征融合了其他位置的特征信息,捕獲大范圍的語境信息。
特征提取網(wǎng)絡(luò)的結(jié)構(gòu)圖如圖2 所示。首先,將圖像下采樣到大小為1/2H*1/2W 的尺寸得到特征Fdown,再將其輸入到改進(jìn)的殘差網(wǎng)絡(luò)ResNet50 中,提取多尺度的特征Fs=1,2,3,4,該殘差包含四層,每一層包含的殘差塊的數(shù)量分別為4、6、5、4。給淺層中分配更多的模塊,使特征中融入淺層特征中包含的細(xì)節(jié)信息。最后,F(xiàn)2,F(xiàn)3經(jīng)過3*3 的卷積層,F(xiàn)4經(jīng)過注意力模塊,得到特征提取網(wǎng)絡(luò)最終的輸出,大小分別為1/4H*1/4W、1/8H*1/8W、1/16H*1/16W。
1.3 匹配代價(jià)集
在GCNet[7]等研究中,將左右特征圖沿著視差搜索范圍串聯(lián)起來,構(gòu)成D*C*H*W 的4D 匹配代價(jià)集,從而使用在代價(jià)聚合網(wǎng)絡(luò)中使用3D 卷積,3D 卷積會(huì)使計(jì)算量增加并且增加網(wǎng)絡(luò)中的參數(shù)。因此,為了減少網(wǎng)絡(luò)的負(fù)擔(dān),加快網(wǎng)絡(luò)推理速度,本文算法將左右特征圖進(jìn)行相關(guān)性操作,構(gòu)建3D 匹配代價(jià)集,把特征提取網(wǎng)絡(luò)提取的不同尺度特征分別進(jìn)行點(diǎn)乘操作,形成多尺度匹配代價(jià)集CVs,s=1,2,3,用于跨尺度代價(jià)聚合。
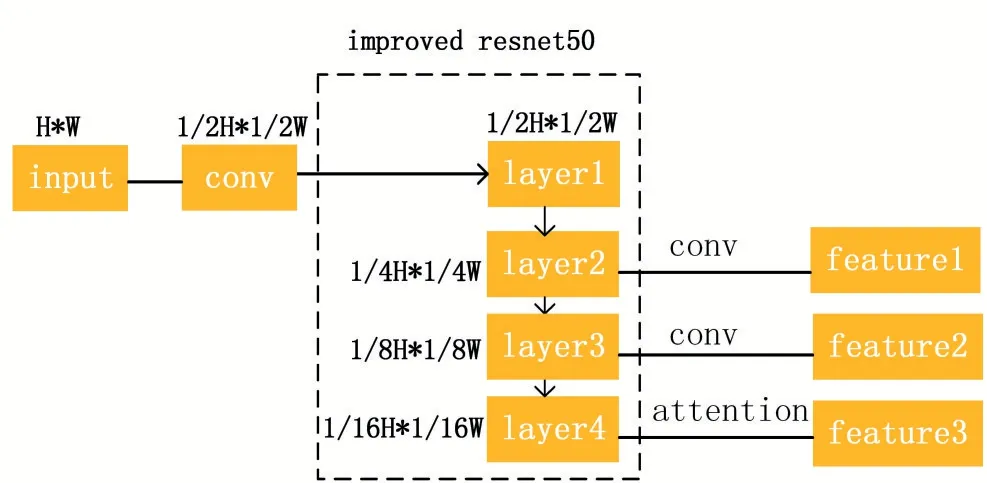
圖2 特征提取網(wǎng)絡(luò)模塊
1.4 跨尺度代價(jià)聚合
在弱紋理區(qū)域,包含的信息較少,因此需要下采樣,提取出具有辨識度的特征,而網(wǎng)絡(luò)的一些細(xì)節(jié)信息,需要在高分辨率的特征中獲取[16]。進(jìn)行不同尺度的代價(jià)聚合,聚合后的特征當(dāng)中不僅包含細(xì)節(jié)信息,還包含豐富的語境信息,有助于減少弱紋理區(qū)域的誤匹配問題。在之前的研究中,許多學(xué)者在代價(jià)聚合模塊使用3D 卷積,但3D 卷積計(jì)算消耗大且會(huì)降低網(wǎng)絡(luò)推理速度,因此,本文算法使用2D 卷積進(jìn)行代價(jià)聚合,減少內(nèi)存消耗以及計(jì)算代價(jià)。跨尺度代價(jià)聚合模塊的結(jié)構(gòu)如圖3 所示。
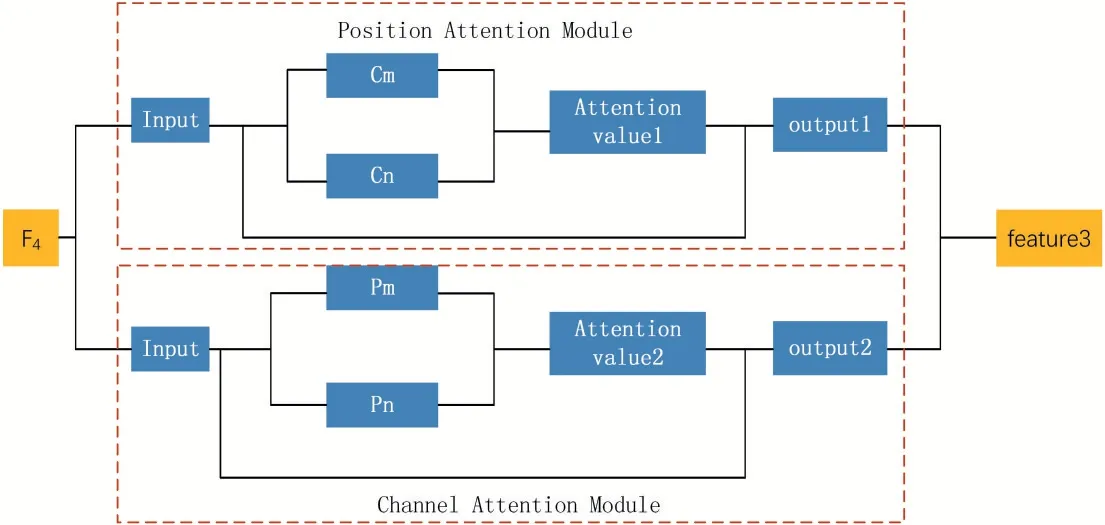
圖3 跨尺度代價(jià)聚合模塊
如圖2 所示,首先,將大小為1/4H*1/4W、1/8H*1/8W 和1/16H*1/16W 的匹配代價(jià)集,分別進(jìn)行上采樣,下采樣操作,再將相同尺度的特征圖通過3*3 的卷積層進(jìn)行特征融合,得到該模塊最終輸出。該模塊類似于AANet[16]中提出的跨尺度模塊,但有兩點(diǎn)不同,一是不同尺度匹配代價(jià)集進(jìn)行融合,采樣使用的卷積操作不同,AANet[16]中使用雙線性差值的方法進(jìn)行采樣,本文使用反卷積進(jìn)行上采樣,特征融合時(shí)AANet[16]中直接相加,本文算法利用卷積操作實(shí)現(xiàn)融合;二是匹配代價(jià)集的分辨率以及通道數(shù)不同。本文算法代價(jià)聚合網(wǎng)絡(luò)共使用6 個(gè)跨尺度聚合模塊,最終通過視差計(jì)算預(yù)測出三張視差圖。
1.5 視差優(yōu)化
在代價(jià)聚合網(wǎng)絡(luò)生成了低分辨率的視差圖,為了進(jìn)一步提高立體匹配的精度,在代價(jià)聚合網(wǎng)絡(luò)后增加視差優(yōu)化模塊,使視差實(shí)現(xiàn)從粗到細(xì)的優(yōu)化。視差優(yōu)化網(wǎng)絡(luò)先將低分辨圖像上采樣到輸入圖像相同的分辨率,再經(jīng)過殘差模塊將低分辨率視差圖進(jìn)一步地優(yōu)化,使得在細(xì)節(jié)處,邊緣處的匹配更加精度。在網(wǎng)絡(luò)訓(xùn)練階段,將網(wǎng)絡(luò)輸出的三張視差圖加權(quán)求和進(jìn)行誤差計(jì)算,權(quán)重分別為0.5、0.7、1.0。測試階段,將最大尺度的視差圖上采樣得到的高分辨視差圖作為最終預(yù)測的視差圖。
2 實(shí)驗(yàn)過程及結(jié)果分析
在SceneFlow[17]以及KITTI[13-14]數(shù)據(jù)集上分別對本文提出的算法進(jìn)行評估,2.1 小節(jié)是對數(shù)據(jù)集的介紹,在2.2 小節(jié)中對實(shí)驗(yàn)的實(shí)現(xiàn)細(xì)節(jié),參數(shù)設(shè)定等做詳細(xì)的介紹,2.3 小節(jié)對算法在不同數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果進(jìn)行定量分析。
2.1 數(shù)據(jù)集介紹
SceneFlow[17]數(shù)據(jù)集:大型的合成數(shù)據(jù)集,包含Monkaa、Driving 以及Flyingthings3D 三個(gè)數(shù)據(jù)集。數(shù)據(jù)集中包含雙目立體圖像對以及視差圖ground truth。共有39824 組數(shù)據(jù),其中35454 組為訓(xùn)練集,4370 組為測試集。圖像分辨率為960*540,該數(shù)據(jù)集常用于網(wǎng)絡(luò)的預(yù)訓(xùn)練。
KITTI[13-14]數(shù)據(jù)集:是在真實(shí)場景中生成的數(shù)據(jù)集,包含車輛、街景、路燈、路標(biāo)以及樹木等物體,共有KITTI2012[13]以及KITTI2015[14]兩個(gè)數(shù)據(jù)集。KITTI2015[14]中包含200 組訓(xùn)練數(shù)據(jù)以及200 組測試數(shù)據(jù),KITTI2012[13]中包含194 組訓(xùn)練數(shù)據(jù)以及195 組測試數(shù)據(jù)。KITTI[13-14]數(shù)據(jù)集訓(xùn)練集中包含雙目立體圖像對以及視差圖ground truth(由Lidar 生成),測試集當(dāng)中僅包含雙目立體圖像對,圖像分辨率均為1242*375。
在SceneFlow[17]數(shù)據(jù)集上,使用EPE(預(yù)測的視差與視差真值差的絕對值的平均值)評估誤差。KITTI[13-14]數(shù)據(jù)集上,3 像素(預(yù)測視差與視差真值間誤差大于3像素的點(diǎn)占總像素?cái)?shù)的比例)誤差為評估標(biāo)準(zhǔn)。
2.2 實(shí)驗(yàn)細(xì)節(jié)介紹
本文實(shí)驗(yàn)是在Ubuntu 18.0 進(jìn)行,用PyTorch 框架搭建跨尺度代價(jià)聚合網(wǎng)絡(luò)(CSSN)。在訓(xùn)練過程中,使用Adam[18]優(yōu)化器,參數(shù)設(shè)置為β1=0.9、β2=0.999。訓(xùn)練網(wǎng)絡(luò)使用兩張NVIDIA 1080Ti。
網(wǎng)絡(luò)預(yù)訓(xùn)練階段使用SceneFlow[17]數(shù)據(jù)集,共訓(xùn)練64 個(gè)epoch,前32 個(gè)epoch 學(xué)習(xí)率設(shè)置為0.001,后32個(gè)epoch 學(xué)習(xí)率設(shè)置為0.0001。網(wǎng)絡(luò)輸入大小為960*540 的雙目圖像對,經(jīng)過網(wǎng)絡(luò)預(yù)測出一張同樣大小的視差圖。KITTI[13-14]數(shù)據(jù)集在SceneFlow[17]數(shù)據(jù)集預(yù)訓(xùn)練的模型上進(jìn)行微調(diào),在KITTI2015[14]上訓(xùn)練1000 個(gè)epoch,前600 個(gè)epoch 的學(xué)習(xí)率設(shè)置為0.001,每隔200個(gè)epoch,學(xué)習(xí)率減半。KITTI2015[14]共200 組數(shù)據(jù),160組作為訓(xùn)練集,剩下40 組作為測試集。KITTI2012[13]中包含194 組數(shù)據(jù),其中160 組作為訓(xùn)練集,34 組作為測試集。
2.3 實(shí)驗(yàn)結(jié)果分析
本文算法在KITTI[13-14]數(shù)據(jù)集上進(jìn)行評估,與之前一些性能較好算法相比有一定的優(yōu)勢,如MCCNN[6]、Displets V2[19]、DRR[20]、SGM-NET[21]和PBCP[22]等,在速度上較有優(yōu)勢,可將其用于實(shí)時(shí)系統(tǒng)中。
KITTI2015[14]上的評估結(jié)果如表1 所示,all area 表示整個(gè)圖像的范圍,Noninclude area 表示圖像去掉遮擋區(qū)域的范圍,最右邊的一列表示的是預(yù)測出一張視差圖所需的時(shí)間。D1-bg、D1-fg、D1-all 分別表示圖像的前景、背景以及整個(gè)區(qū)域。
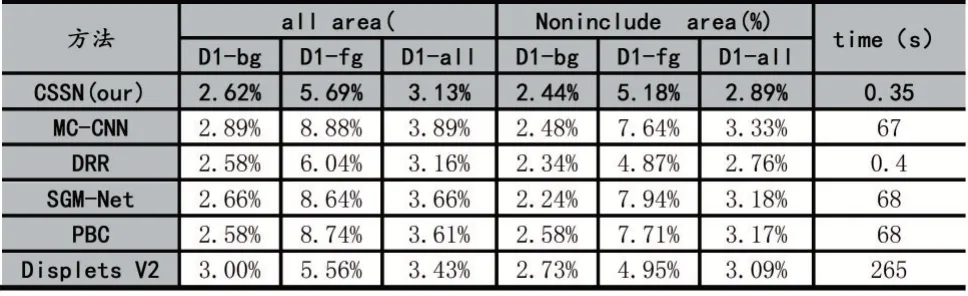
表1 KITTI2015 評估結(jié)果
從表1 當(dāng)中,可以看出本文算法在整個(gè)圖像區(qū)域的誤差較小,整體的匹配精度較高。與Displets V2[19]相比,匹配誤差減小了9%,與MCCNN[6]相比,誤差減少了24%。在時(shí)間性能上,本文算法生成一張視差圖僅需要350ms,比DRR 算法速度快約14%,且速度比MCCNN[6]算法快約190 倍。但在圖像的前景區(qū)域,由于包含有的樹木、路標(biāo)等物體,在路標(biāo)細(xì)節(jié)處易發(fā)生誤匹配的問題。
本文算法在KITTI2012[13]上的評估結(jié)果如表2 所示,Out-Noc 表示的是非遮擋區(qū)域,Out-All 表示整個(gè)圖像區(qū)域,Avg-Noc 表示非遮擋區(qū)域的平均誤差,Avg-Noc 展示整個(gè)圖像區(qū)域的平均誤差,最后一列是算法的運(yùn)行時(shí)間。表2 中展示的是3 像素位置、非遮擋區(qū)域和整個(gè)圖像區(qū)域上的誤差,并與目前已有一些算法如Displets V2[19]、SGM-NET[21]、PBCP[22],以及SsSMnet[23]等優(yōu)秀算法的實(shí)驗(yàn)結(jié)果對比。
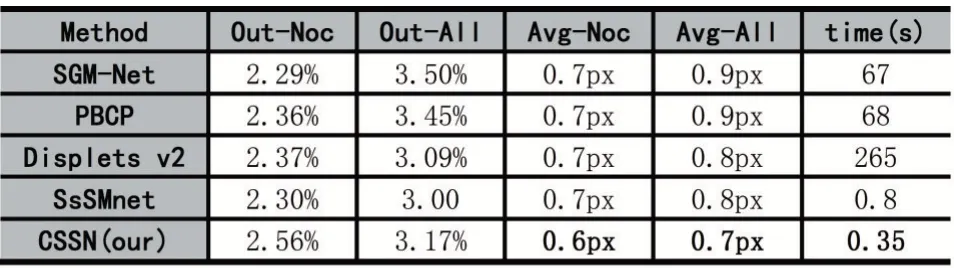
表2 KITTI2012 評估結(jié)果
從表2 中可以看出,本文算法在一些指標(biāo)如非遮擋/整個(gè)圖像區(qū)域上的平均誤差、算法運(yùn)行時(shí)間上有一定的優(yōu)勢,在非遮擋區(qū)域的平均誤差,本文算法的精度比Displets V2[19]精度提升了16.7%,整個(gè)圖像區(qū)域上精度提升12.5%。同時(shí),算法運(yùn)行速度縮小至SsSMnet[23]的46.5%,運(yùn)行速度大大減少,可以將本文算法用于實(shí)時(shí)系統(tǒng)當(dāng)中。
3 結(jié)語
本文提出了跨尺度代價(jià)聚合網(wǎng)絡(luò),使用筆者之前研究中的注意力機(jī)制模塊,分別從通道和空間維度捕獲信息,獲取上下文語境信息,在代價(jià)聚合網(wǎng)絡(luò)中,將多尺度的匹配代價(jià)集進(jìn)行聚合,得到不同尺度的視差圖通過融合采樣得到最終網(wǎng)絡(luò)輸出。本文算法在速度上和精度上均實(shí)現(xiàn)較好的性能,提高了弱紋理區(qū)域的匹配精度。但在遮擋區(qū)域以及前景區(qū)域等存在誤匹配問題,未來的研究重點(diǎn)將提升遮擋區(qū)域的匹配上。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
