一種重型車監控平臺與OBD數據延時修正方法
2021-05-14 04:12:02熊興旺楊妍妍甄凱劉保獻
車用發動機 2021年2期
熊興旺,楊妍妍,甄凱,劉保獻,5
(1.中國汽車技術研究中心有限公司,北京 100176;2.北京市生態環境監測中心,北京 100048;3.大氣顆粒物監測技術北京市重點實驗室,北京 100048;4.中國汽車技術研究中心有限公司,天津 300300; 5.清華大學環境學院,北京 100084)
隨著重型車排放法規的加嚴,重型車遠程監控車載終端逐漸開始推廣應用[1]。重型車國六標準GB 17691—2018《重型柴油車污染物排放限值及測量方法(中國第六階段)》的附錄Q中規定了車載終端需要采集并向平臺傳輸規定的數據項。北京市生態環境局發布的《北京市重型汽車和非道路移動機械排放遠程監測管理車載終端安裝管理辦法(試行)》通告,要求符合GB 17691—2005國五階段的重型車上的車載終端采集規定的數據并向重型車監管平臺傳輸,且重型汽車生產企業應確保車載終端采集和上傳的數據與重型汽車實際數據一致,按照國家標準開展排放遠程監測管理車載終端數據一致性等相關試驗。
重型車遠程監控平臺接收到的數據與試驗中采集的OBD數據進行一致性比對時,重型車遠程監控平臺接收的數據序列長度和起始時間,同采集的OBD數據序列長度和起始時間存在差異,計算兩數據序列相關性時,需要對平臺接收數據序列和OBD采集數據序列進行延時修正,若不進行延時修正,直接計算兩時間錯位的數據序列,相關性會受到較大影響,進而干擾一致性試驗結論。
目前,實驗室常用的延時修正方法以瞬時車速為基準,對平臺接收數據序列和OBD采集數據序列進行時間對齊,利用對齊后的數據序列之間的相關系數來驗證時間對齊效果[2]。時間對齊時,若逐次比較多個不同平移時間的對齊效果,會極大影響效率。為提高時間對齊的效率,考慮利用計算兩數據序列間的互相關函數極大值的方式進行時間對齊,對數據序列進行延時修正[3-4]。本研究在重型車試驗中,同步采集平臺接收數據和OBD數據,對重型車在線監控平臺接收的數據序列與OBD采集的數據序列進行延時修正,并進行延時修正后數據序列的相關性分析。
1 試驗系統與方案
試驗采用一輛國六貨車,該車的性能參數見表1。試驗中所采用的主要測試儀器設備見表2。

表1 試驗車輛性能參數

表2 試驗用儀器設備
試驗車輛加載質量,按照標準GB 17691—2018中對Pems試驗規定的工況比例構成要求,生成模擬Pems試驗工況,在底盤測功機上模擬Pems試驗,用OBS-ONE-G12設備采集試驗OBD數據,數據采集頻率為1 Hz。試驗中啟用遠程排放管理車載終端,同步在重型車遠程監測平臺接收車載終端傳輸的數據,數據傳輸采集頻率為1 Hz。圖1示出試驗中的模擬Pems試驗實際車速曲線。

圖1 模擬Pems試驗實際車速曲線
2 延時修正方法
對監控平臺接收到的數據序列與OBD采集的數據序列進行延時修正后,排除噪聲干擾等外界因素,理論上應該具有較強相關性[5]。可以借鑒計算無偏互相關函數極大值的方式來計算兩序列的延時。對于長度為N的時間序列x和y,x和y序號從0至N-1,則x和y間的無偏互相關函數為[6]
(1)
式中:t=-(N-1), -(N-2),…0,…N-2,N-1;N為時間序列x和y的長度。
傳感器采集數據頻率為1 Hz,采集的數據序列長度一般都較長(大于3 600 s),各數據項的延時相對
于序列長度較小,因此無需遍歷整個數據序列長度,只在[-3 600 s,3 600 s]區間內計算互相關函數值,步長為1 s。
對各數據項分別構造以監控平臺接收數據為基準的互相關函數:
(2)
式中:Δ(t)為OBD數據yOBD相對于監控平臺接收數據yMon的無偏互相關函數值;yMon和yOBD代表平臺接收數據和OBD數據對應進行延時修正的數據項,分別為車速、發動機轉速、進氣流量、燃油流量和NOx排放量;t=-3 600, -3 599,…0,…3 599,3 600;X為時間序列yMon和yOBD的長度。
在[-3 600 s,3 600 s]區間內,對車速、發動機轉速、進氣流量、燃油流量和NOx排放量等各數據項分別計算得到互相關函數序列,為便于對比觀察,將各數據項各自對應的互相關函數序列分別進行數據歸一化處理,歸一化互相關函數曲線的極大值處對應的平移時間即為兩時間序列的延時。對滯后的時間序列進行延時修正,兩數據序列進行長度對齊,長度對齊后的兩數據序列按照最小二乘法進行線性擬合,計算相關系數R2,評估延時修正效果。
3 原始數據序列修正結果
圖2至圖6分別示出監控平臺接收到的車速、發動機轉速、進氣流量、燃油流量和NOx數據與對應OBD采集的數據曲線對比及延時。其中,NOx傳感器采集數據時,為了保護傳感器,需要滿足露點溫度的條件才能進入正常工作狀態[7],否則讀取的NOx數據會為異常的假值,這部分異常數據本身并無參考意義,同時也會影響互相關函數計算結果。因此,NOx數據進行分析之前,需要先剔除這部分異常數據。從圖2至圖6可以看到,監控平臺接收到的數據序列明顯滯后于采集的OBD數據序列。根據式(2)計算得到OBD數據序列關于監控平臺接收數據序列的互相關函數曲線,并進行歸一化。從圖2至圖6中可分別得到歸一化互相關函數曲線的極大值處對應的平移時間,此平移時間即為延時。

圖2 遠程平臺與OBD車速曲線對比及延時

圖3 遠程平臺與OBD發動機轉速曲線對比及延時

圖4 遠程平臺與OBD進氣流量曲線對比及延時


圖5 遠程平臺與OBD燃油流量曲線對比及延時

圖6 遠程平臺與OBD NOx排放曲線對比及延時
將圖2至圖6中的數據序列分別在時間軸上進行延時修正,圖7至圖11分別為延時修正后的平臺車速、發動機轉速、進氣流量、燃油流量和NOx數據與OBD數據曲線對比。從圖7至圖11中可以直觀看到,延時修正后的兩時間序列基本重合,這說明延時修正后,兩數據序列具有較強的相關性,延時修正的效果較好。


圖7 遠程平臺與OBD車速曲線延時修正后對比


圖8 遠程平臺與OBD發動機轉速曲線延時修正后對比

圖9 遠程平臺與OBD進氣流量曲線延時修正后對比
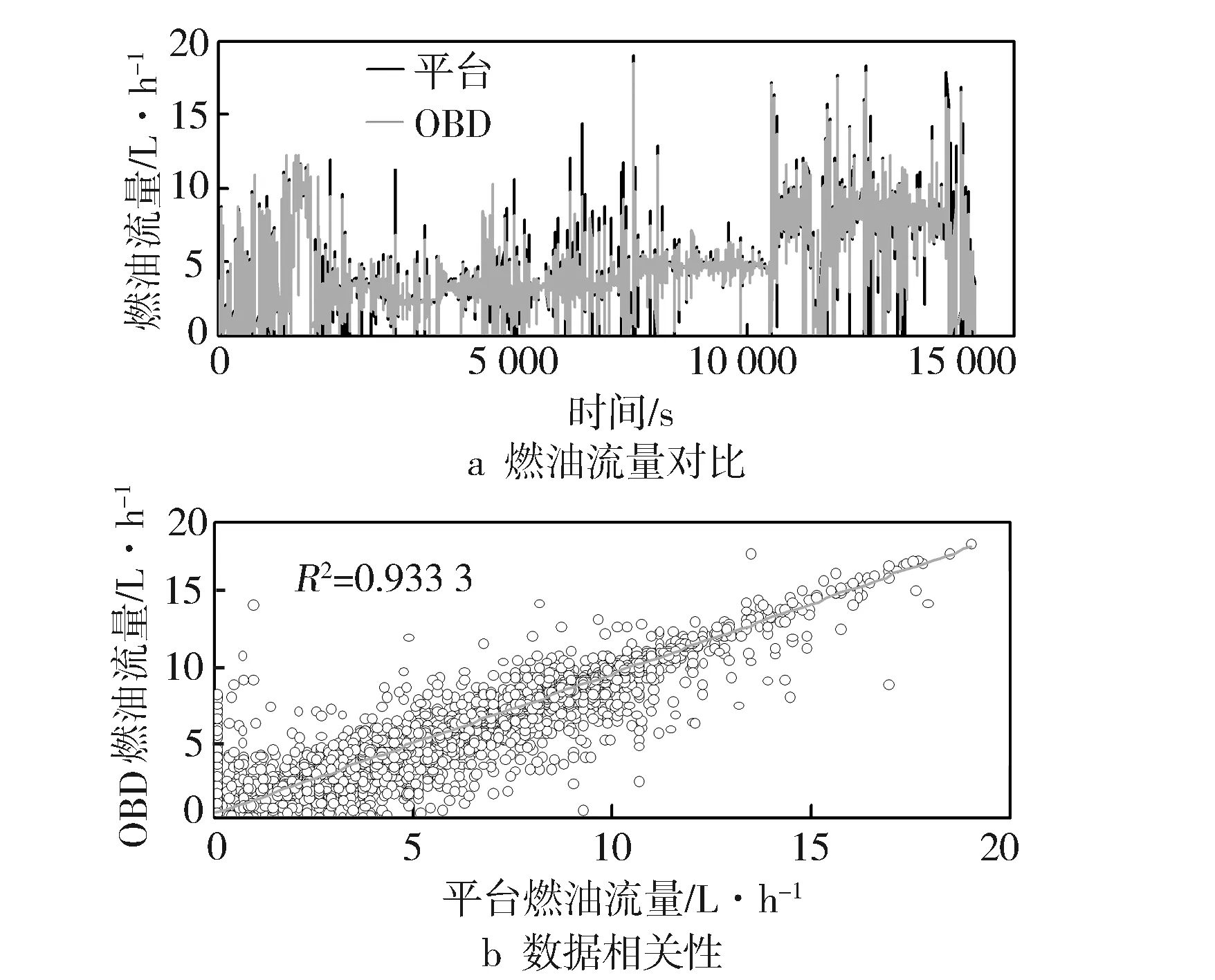
圖10 遠程平臺與OBD燃油流量曲線延時修正后對比

圖11 遠程平臺與OBD NOx排放曲線延時修正后對比
匯總各數據項平臺數據與OBD數據間的延時,并統計進行延時修正后的數據序列之間的最小二乘法擬合相關系數R2,結果見表3。

表3 各數據項延時與延時修正后相關系數
從表3中可以看到,車速、發動機轉速、進氣流量和NOx排放量等各數據項的延時均為529 s,燃油流量的延時為528 s;延時修正后的數據系列間相關系數R2均大于0.9。從各數據項之間的延時比較可以看出,各數據項的延時并不完全相同,燃油流量如果按照529 s的延時來進行時間對齊,延時修正后的燃油流量數據序列相關系數R2為0.803 1,小于0.9,對延時修正后的兩數據序列間的相關性產生了明顯的影響。計算得到的燃油流量信號的延時同車速等信號的延時不同,可能是由于不同信號的采集過程并非嚴格的時間同步,不同信號的采集過程之間也存在延時。
平臺數據與OBD數據本質上都是從ECU讀取的實時數據流信號,但由于信號采集的初始時間的差異,所以會存在采集傳輸起始時間不一致的問題,若經過合理的延時修正,在噪聲信號干擾較小的情況下,兩時間序列理應存在較強的相關性。通過互相關函數方式計算的延時與通過計算相關系數R2最大值方式得到的延時一致。表3的統計結果表明,用互相關函數求極大值的方式對平臺接收數據序列和OBD數據序列進行延時修正,修正結果較為理想。
4 加入噪聲數據序列修正結果
車載終端向重型車監控平臺傳輸數據的過程中,會存在噪聲信號的干擾。不同類型、不同信噪比的噪聲會不同程度地影響算法的精度[8-9]。為考察本研究的延時修正方法對噪聲的抗干擾能力,利用Matlab軟件對重型車監控平臺接收到的數據添加信噪比為SNR=-10 dB的高斯白噪聲信號,合成為新的平臺接收數據,利用互相關函數法計算加入噪聲后的合成平臺接收數據序列與對應OBD數據序列之間的延時。
將重型車監控平臺接收到的車速、發動機轉速、進氣流量、燃油流量和NOx數據序列分別加入高斯白噪聲信號,圖12至圖16示出加噪聲合成后的平臺數據與對應的OBD采集數據之間的對比及延時。從圖12至圖16可以看到,合成后的平臺數據曲線上含有很多“毛刺”,與原始信號相比,存在明顯失真,其中車速信號和燃油流量信號失真現象尤其明顯;合成后的平臺數據與OBD數據之間的相關性變差。同樣根據式(2),構造OBD各數據項關于對應的合成后的平臺各數據項間的互相關函數,并將函數曲線歸一化。從圖12至圖16中可分別得到歸一化互相關函數曲線的極大值,極大值處對應的平移時間即為延時。

圖12 遠程平臺信號加噪聲后與OBD 車速曲線對比及延時

圖13 遠程平臺信號加噪聲后與OBD 發動機轉速曲線對比及延時


圖14 遠程平臺信號加噪聲后與OBD 進氣流量曲線對比及延時
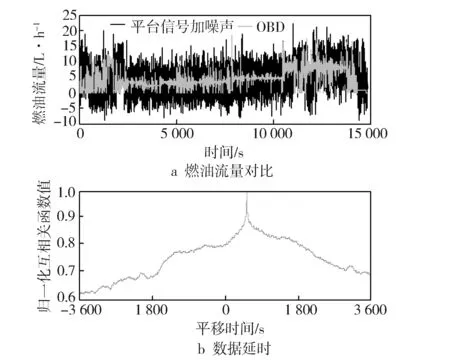
圖15 遠程平臺信號加噪聲后與OBD 燃料流量曲線對比及延時

圖16 遠程平臺信號加噪聲后與OBD NOx排放曲線對比及延時
統計圖12至圖16中的各數據項對應的延時,統計結果見表4。

表4 平臺數據加噪聲合成后各數據項延時
從表4中可以看到,對于各數據項,平臺數據加噪聲合成后與OBD數據間的延時同原始平臺接收數據與OBD數據之間的延時完全相同,具有良好的一致性。這說明本研究中的延時修正方法可以在一定程度上排除車載遠程終端向平臺傳輸信號過程中受到的噪聲干擾,具備一定的抗噪聲干擾能力。
5 結論
a) 利用互相關函數求極大值法對重型車監控平臺接收的車速、發動機轉速、進氣流量、燃油流量和NOx數據序列與對應OBD數據序列進行延時修正,各數據項的延時大小并不完全相同,延時修正后各數據序列的相關系數R2均大于0.9;
b) 車速、發動機轉速、進氣流量、燃油流量和NOx的平臺接收數據加信噪比為SNR=-10 dB的高斯白噪聲信號后,與相應的OBD數據之間的延時同加入噪聲前完全相同。