基于數(shù)據(jù)驅(qū)動(dòng)的波形護(hù)欄監(jiān)測(cè)數(shù)據(jù)故障診斷方法研究
2021-05-14 00:14:10韓子?xùn)|崔鵬飛
公路交通科技 2021年4期
韓子?xùn)|,崔鵬飛,張 凱
(中國(guó)公路工程咨詢集團(tuán)有限公司,北京 100097)
0 引言
2019年9月,中共中央、國(guó)務(wù)院正式印發(fā)的《交通強(qiáng)國(guó)建設(shè)綱要》中特別指出,要“構(gòu)建泛在先進(jìn)的交通信息基礎(chǔ)設(shè)施”,該項(xiàng)要求給智慧交通的發(fā)展指明了方向[1]。在交通強(qiáng)國(guó)建設(shè)背景下,交通運(yùn)輸部開(kāi)展了一系列頂層規(guī)劃和戰(zhàn)略部署,將發(fā)展智慧交通作為行業(yè)主攻方向[2]。其中,在2019年7月,交通運(yùn)輸部印發(fā)了《數(shù)字交通發(fā)展規(guī)劃綱要》,提出讓“啞設(shè)施”具備多維監(jiān)測(cè)、智能網(wǎng)聯(lián)、精準(zhǔn)管控、協(xié)同服務(wù)能力[3]。高速公路波形護(hù)欄就是一種典型的“啞設(shè)施”。本研究作者研發(fā)團(tuán)隊(duì)設(shè)計(jì)了一種面向端邊協(xié)同的波形護(hù)欄監(jiān)測(cè)系統(tǒng),該系統(tǒng)以波形護(hù)欄撞擊監(jiān)測(cè)為主,融合、聯(lián)動(dòng)其他感知設(shè)施,一方面能夠提升感知精度,另一方面能夠提高高速公路應(yīng)急救援和運(yùn)營(yíng)養(yǎng)護(hù)效率。本研究?jī)H對(duì)其中撞擊監(jiān)測(cè)的核心算法進(jìn)行闡述,傳感器設(shè)計(jì)、布設(shè)的優(yōu)化和聯(lián)動(dòng)另文描述。
在我國(guó),高速公路交通事故感知基本依賴人工視頻輪詢監(jiān)控和視頻事件智能檢測(cè)兩種方式,雖然我國(guó)各高速公路正在進(jìn)行全國(guó)視頻聯(lián)網(wǎng)建設(shè)工作,但距離高速公路主線視頻全覆蓋還有很長(zhǎng)的一段路要走,更何況,受視距、視頻質(zhì)量、天氣環(huán)境等因素的影響,各類攝像機(jī)智能檢測(cè)的有效距離也十分有限,這會(huì)導(dǎo)致高速公路如果僅憑視頻手段,很難實(shí)現(xiàn)交通事故的全天候、全線的感知全覆蓋,而利用護(hù)欄監(jiān)測(cè)和視頻等其他技術(shù)的融合、聯(lián)動(dòng),是提高交通安全、應(yīng)急保障效率的解決路線之一。但是,行業(yè)內(nèi)護(hù)欄監(jiān)測(cè)還處在探索階段,其技術(shù)多采用光纖傳感技術(shù)[4]和視頻比對(duì)技術(shù)[5]。其中光纖傳感技術(shù)由于需要在護(hù)欄外側(cè)通鋪傳感器,發(fā)生較嚴(yán)重撞擊時(shí)其傳感器也會(huì)遭到嚴(yán)重破壞,其建設(shè)成本和維修成本居高不下,阻礙了科技成果的轉(zhuǎn)化。而視頻比對(duì)技術(shù)多在運(yùn)營(yíng)維護(hù)期間,采用車(chē)載式攝像機(jī)巡邏后,回到數(shù)據(jù)中心將新、舊視頻進(jìn)行比對(duì)而實(shí)現(xiàn)護(hù)欄的健康狀態(tài)的判斷,無(wú)法做到實(shí)時(shí)監(jiān)測(cè)碰撞事件。此外,對(duì)波形護(hù)欄撞擊類事件數(shù)據(jù)的研究也十分稀少,現(xiàn)有研究或產(chǎn)品多采用閾值法來(lái)鑒定是否有事故發(fā)生。
從研究過(guò)程中獲取的數(shù)據(jù)發(fā)現(xiàn),護(hù)欄監(jiān)測(cè)數(shù)據(jù)中除撞擊產(chǎn)生的數(shù)據(jù)外,還存在著大量的自然噪聲,這些噪聲的來(lái)源可能是來(lái)自自然噪聲、傳感器漂移、地磁等因素,導(dǎo)致其從多尺度特性上掩蓋了故障信息[6],此外數(shù)據(jù)中還包含有對(duì)監(jiān)測(cè)碰撞而言是干擾數(shù)據(jù),但確是聯(lián)動(dòng)其他設(shè)備必不可少的數(shù)據(jù),例如有車(chē)輛長(zhǎng)期占用應(yīng)急車(chē)道。因此,為了能高效識(shí)別出碰撞數(shù)據(jù),并與其他設(shè)備更好實(shí)現(xiàn)聯(lián)動(dòng),必須要從多尺度上降低噪聲、保留干擾信息、分離并定位撞擊產(chǎn)生的數(shù)據(jù)。采用傳統(tǒng)的閾值法顯然無(wú)法滿足上述需求。
本研究將護(hù)欄監(jiān)測(cè)的過(guò)程視為一種“過(guò)程監(jiān)測(cè)”,將碰撞產(chǎn)生的數(shù)據(jù)、大貨車(chē)經(jīng)過(guò)時(shí)產(chǎn)生的干擾、環(huán)境產(chǎn)生的噪聲數(shù)據(jù)共同視為“數(shù)據(jù)故障”,探索利用數(shù)據(jù)驅(qū)動(dòng)方法來(lái)從海量的過(guò)程數(shù)據(jù)中,去除噪聲數(shù)據(jù)、屏蔽干擾數(shù)據(jù),診斷并分離出碰撞數(shù)據(jù)。由于沒(méi)有類似的研究以供參考,需要嘗試多種基于數(shù)據(jù)驅(qū)動(dòng)的故障診斷方法,從中選擇適合護(hù)欄監(jiān)測(cè)的方法,并進(jìn)行優(yōu)化。基于數(shù)據(jù)驅(qū)動(dòng)的故障診斷方法有很多,它是一類方法的總稱[7],這些方法不需要建立被監(jiān)測(cè)對(duì)象的復(fù)雜的數(shù)學(xué)模型,只需要利用海量的帶故障標(biāo)記的過(guò)程數(shù)據(jù)或不帶標(biāo)記的正常數(shù)據(jù)來(lái)建立投影空間,再利用該投影空間來(lái)完成實(shí)時(shí)數(shù)據(jù)的故障診斷。數(shù)據(jù)驅(qū)動(dòng)的故障診斷方法可被分為多元統(tǒng)計(jì)類方法、機(jī)器學(xué)習(xí)類方法、信號(hào)處理類方法和粗糙集方法等[8]。其中多元統(tǒng)計(jì)類方法主要包括主元分析(Principal Component Analysis,PCA)、偏最小二乘法(Partial Least Squares,PLS)和費(fèi)舍爾判別(Fisher Discrimination Analysis,FDA)等[9]。本研究提出的面向端邊協(xié)同的波形護(hù)欄監(jiān)測(cè)系統(tǒng)中的各監(jiān)測(cè)模塊,均采用了多種傳感器,當(dāng)有撞擊事件時(shí),各傳感器數(shù)據(jù)之間具有多維相關(guān)性,該類數(shù)據(jù)適合采用基于多元統(tǒng)計(jì)類方法的故障診斷,其大致原理是先利用海量的正常歷史數(shù)據(jù)創(chuàng)建多維變量的投射空間,當(dāng)進(jìn)行實(shí)時(shí)監(jiān)測(cè)時(shí),實(shí)時(shí)數(shù)據(jù)被投射到該空間內(nèi),此時(shí)統(tǒng)計(jì)各實(shí)時(shí)數(shù)據(jù)在該空間的各類統(tǒng)計(jì)指標(biāo),根據(jù)統(tǒng)計(jì)指標(biāo)來(lái)進(jìn)行故障的診斷與分離。
本研究根據(jù)上述護(hù)欄監(jiān)測(cè)的數(shù)據(jù)分類,尤其是實(shí)地試驗(yàn)受到的環(huán)境噪聲數(shù)據(jù)的特征,首先利用前期研究的成果,進(jìn)一步改進(jìn)了現(xiàn)有的小波閾值降噪算法,對(duì)原始數(shù)據(jù)實(shí)現(xiàn)多尺度降噪,重構(gòu)后可以盡量在抑制噪聲的同時(shí),保留有效信息。將降噪重構(gòu)后的信號(hào)作為故障診斷模型的輸入,再通過(guò)對(duì)比分析基于PCA,PLS,F(xiàn)DA的故障診斷模型的原理后,認(rèn)為基于FDA的故障診斷更適合護(hù)欄監(jiān)測(cè)數(shù)據(jù)故障診斷;為提高FDA的抗噪能力,將FDA模型和改進(jìn)的小波閾值算法結(jié)合,形成了基于多尺度費(fèi)舍爾判別分析(Multi-scale Fisher Discrimination Analysis,MSFDA)的故障診斷模型,該模型作為整套波形護(hù)欄監(jiān)測(cè)系統(tǒng)的數(shù)據(jù)處理核心算法。
本研究最后通過(guò)對(duì)比試驗(yàn),從理論上驗(yàn)證了基于數(shù)據(jù)驅(qū)動(dòng)的波形護(hù)欄監(jiān)測(cè)模型相比較傳統(tǒng)閾值法準(zhǔn)確率更高,同時(shí),也驗(yàn)證了數(shù)據(jù)驅(qū)動(dòng)方法中,F(xiàn)DA比PCA,PLS更適合該類情況,原因可能是FDA在初始空間創(chuàng)建過(guò)程中需要利用帶有故障數(shù)據(jù)標(biāo)記而導(dǎo)致的。此外,本研究最后提出的合成的MSFDA模型為最終應(yīng)用在護(hù)欄監(jiān)測(cè)系統(tǒng)中的算法模型,試驗(yàn)表明,該模型相比較PCA,PLS,F(xiàn)DA,可顯著提高該系統(tǒng)的抗噪、抗干擾能力,準(zhǔn)確率更高。
1 原始數(shù)據(jù)分析及監(jiān)測(cè)目標(biāo)
1.1 原始數(shù)據(jù)分析
研發(fā)團(tuán)隊(duì)在貨車(chē)比例較高的某高速公路外側(cè)護(hù)欄以200 m間隔,布設(shè)了10個(gè)監(jiān)測(cè)點(diǎn),各監(jiān)測(cè)點(diǎn)設(shè)置為觸發(fā)檢測(cè),即有較大震動(dòng)時(shí)采集一組數(shù)據(jù)。在數(shù)據(jù)采集過(guò)程中沒(méi)有發(fā)生撞擊事故,但車(chē)流量較大時(shí)大型貨車(chē)占用應(yīng)急車(chē)道現(xiàn)象較多。從中選取3個(gè)監(jiān)測(cè)點(diǎn),在車(chē)流量較大時(shí)間段和車(chē)流量較小時(shí)間段各采集1個(gè)小時(shí),所采集的檢測(cè)數(shù)據(jù),去除無(wú)效數(shù)據(jù),各約1 350組數(shù)據(jù)。將兩個(gè)時(shí)間段數(shù)據(jù)展開(kāi)對(duì)比如圖1所示。
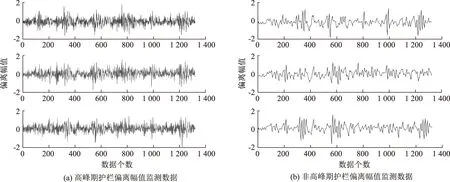
圖1 高峰期與非高峰期護(hù)欄偏離幅值監(jiān)測(cè)數(shù)據(jù)對(duì)比Fig.1 Comparison of monitoring and testing data of guardrail deviation amplitude in peak period and off-peak period
在沒(méi)有撞擊事故的前提下,從直觀上看,數(shù)據(jù)中包含了大量的的噪聲和干擾數(shù)據(jù)。其中噪聲的原因可能來(lái)自大自然的干擾、地磁干擾以及前端傳感器軟硬件工作屬性的不一致等[10]。而且隨著數(shù)據(jù)量的增多,大量的噪聲在多尺度上掩蓋有用信息[11]。干擾信息的產(chǎn)生原因主要是與重載貨車(chē)經(jīng)過(guò)時(shí)產(chǎn)生的震動(dòng)或傳感器的漂移漸變等因素有關(guān),傳感器原因?qū)е碌母蓴_數(shù)據(jù)往往呈現(xiàn)出緩變型、恒偏差型,而大貨車(chē)震動(dòng)時(shí)產(chǎn)生的干擾數(shù)據(jù)會(huì)呈現(xiàn)出高頻型、突變型,這類數(shù)據(jù)往往會(huì)被噪聲掩蓋。
1.2 監(jiān)測(cè)目標(biāo)
護(hù)欄撞擊監(jiān)測(cè)的目標(biāo)不僅是為了能夠?qū)崟r(shí)檢測(cè)出碰撞事件,也要為與其他設(shè)備實(shí)現(xiàn)聯(lián)動(dòng)提供優(yōu)質(zhì)數(shù)據(jù)來(lái)源。例如本研究提到的干擾信息也是有用信息的一種,當(dāng)干擾信息頻繁出現(xiàn)時(shí),能夠反映出重載車(chē)輛數(shù)量可能較多,或者現(xiàn)場(chǎng)監(jiān)測(cè)設(shè)備出現(xiàn)了故障,需要提醒運(yùn)營(yíng)單位重點(diǎn)關(guān)注。
綜上分析,本研究首先需要利用數(shù)據(jù)驅(qū)動(dòng)算法中的小波閾值除噪,在多尺度上降低噪聲,并保留大部分有用信息。其次,選擇適合護(hù)欄監(jiān)測(cè)的數(shù)據(jù)驅(qū)動(dòng)算法,對(duì)比各算法的故障診斷準(zhǔn)確度。最后合并適合的數(shù)據(jù)驅(qū)動(dòng)算法,與小波閾值算法合并,形成波形護(hù)欄監(jiān)測(cè)的核心算法。
2 基于數(shù)據(jù)驅(qū)動(dòng)的故障診斷模型
2.1 改進(jìn)的小波閾值除噪
本研究提出的改進(jìn)的小波閾值除噪方法是在過(guò)去的研究基礎(chǔ)上進(jìn)行改進(jìn)。由于前期研究成果是針對(duì)交通量檢測(cè)器而設(shè)計(jì)的,閾值指標(biāo)體系較高,本次應(yīng)用在護(hù)欄監(jiān)測(cè)上,需要調(diào)低閾值,增強(qiáng)靈敏度。本研究對(duì)文獻(xiàn)[11]中的噪聲標(biāo)準(zhǔn)方差估計(jì)、閾值設(shè)定和小波系數(shù)調(diào)整函數(shù)3個(gè)方面進(jìn)行修改,讓其更適合護(hù)欄監(jiān)測(cè)數(shù)據(jù)的使用情況。
(1) 噪聲標(biāo)準(zhǔn)差估計(jì)公式:
噪聲標(biāo)準(zhǔn)差是衡量噪聲與其本來(lái)應(yīng)該正確的信息之間的差距。首先,將原信號(hào)進(jìn)行多尺度的分解,根據(jù)經(jīng)驗(yàn),本算法將尺度值J設(shè)為5,以此獲得每個(gè)尺度下有一個(gè)高頻、低頻兩個(gè)信號(hào),而高頻信號(hào)主要由噪聲構(gòu)成,需要濾除,設(shè)高頻信號(hào)為Wj,k,則該高頻信號(hào)中的噪聲標(biāo)準(zhǔn)差估計(jì)公式定義為:
(1)
式中,j為當(dāng)前尺度,最高尺度為5;N為當(dāng)前尺度下的小波系數(shù)的總個(gè)數(shù);k為當(dāng)前小波系數(shù)的個(gè)數(shù)。
(2)閾值設(shè)定函數(shù)
為了去除小波分解后得到的各高頻信息中的噪聲,需要設(shè)定一個(gè)閾值,這里參考文獻(xiàn)[12]中給出的統(tǒng)一閾值公式,從該公式中可看出,隨著信號(hào)的信噪比不同,閾值也在隨著實(shí)際情況的改變而改變:
(2)
設(shè)定閾值后需要將多尺度分解的J組高頻信號(hào)系數(shù)按絕對(duì)值從小到大進(jìn)行排列,從而得到一個(gè)高頻信號(hào)系數(shù)向量:P=[Waj, n], 1≤n≤N。以此來(lái)獲得每個(gè)尺度下的評(píng)估向量:R=[rn], 1≤n≤N,其中:
(3)

(4)
其中Pa, j,ρN, j的計(jì)算公式如下:
(5)
(3)小波系數(shù)估計(jì)值的計(jì)算方法

因此,得到需要被替換的小波系數(shù)的估計(jì)值:
(6)
詳細(xì)的改進(jìn)小波閾值除噪算法步驟見(jiàn)文獻(xiàn)[11]。
2.2 基于多元統(tǒng)計(jì)的故障診斷方法綜述
2.2.1基于PCA的故障診斷模型

當(dāng)需要區(qū)分正常數(shù)據(jù)和故障數(shù)據(jù)的時(shí)候,通常采用平方預(yù)測(cè)誤差(Squared prediction error,SPE)和Hotelling’sT2(以下簡(jiǎn)稱T2)來(lái)檢測(cè)過(guò)程是否發(fā)生異常[14]。
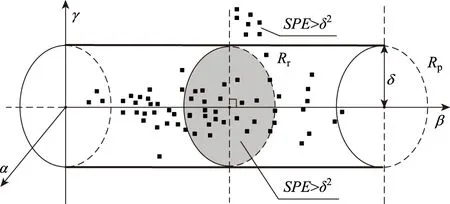
圖2 基于SPE指標(biāo)的PCA故障檢測(cè)示意圖Fig.2 Schematic diagram of PCA fault detection based on SPE indicators


由于SPE與T2指標(biāo)的監(jiān)測(cè)重點(diǎn)不同,所以會(huì)經(jīng)常出現(xiàn)一個(gè)現(xiàn)象:某個(gè)在線數(shù)據(jù)向量在殘差空間的投影在正常范圍內(nèi),但是,該數(shù)據(jù)向量在主元空間的投射卻超過(guò)了其控制域范圍。這說(shuō)明該數(shù)據(jù)可能是數(shù)據(jù)故障,也有可能是測(cè)量范圍出現(xiàn)了變化,需要用其他手段來(lái)輔助決策故障信息。
綜上,當(dāng)PCA故障診斷模型應(yīng)用在護(hù)欄故障檢測(cè)中,可以將10組監(jiān)測(cè)點(diǎn)的每一個(gè)傳感器視為一個(gè)變量,共同組成一個(gè)數(shù)據(jù)矩陣X。以此來(lái)監(jiān)測(cè)數(shù)據(jù)故障,來(lái)判斷是否有傳感器檢測(cè)出異常情況。
2.2.2基于PLS的故障診斷模型
但是在護(hù)欄監(jiān)測(cè)系統(tǒng)的實(shí)際應(yīng)用中,為了判斷碰撞事件,只需要重點(diǎn)關(guān)注某一到兩種傳感器數(shù)據(jù),其他種類傳感器的數(shù)據(jù)僅作為輔助,PLS模型恰巧可以實(shí)現(xiàn)該功能。PLS模型是在PCA模型的基礎(chǔ)上,從變量x(t)中,選取重點(diǎn)關(guān)注的變量R(t),其方法也基本類似,即利用歷史正常數(shù)據(jù)構(gòu)建出Sp與Sr兩個(gè)子空間,再將在線監(jiān)測(cè)數(shù)據(jù)投射到這兩個(gè)子空間中,設(shè)置統(tǒng)計(jì)指標(biāo),完成故障檢測(cè)。如果變量空間Y中發(fā)生故障,即該故障會(huì)影響質(zhì)量變化,則故障一定發(fā)生在子空間Sp,如果發(fā)生故障不會(huì)影響質(zhì)量變化,則故障一定發(fā)生在子空間Sr中。通常,采用T2指標(biāo)來(lái)檢測(cè)Sp的故障,用Q指標(biāo)檢測(cè)發(fā)生在Sr中的故障[16]。

在上述計(jì)算過(guò)程中,會(huì)發(fā)現(xiàn)一個(gè)現(xiàn)象,即T2和Q是相關(guān)的,這會(huì)導(dǎo)致某一個(gè)故障可以同時(shí)出現(xiàn)在兩個(gè)子空間中,這與PCA中采用SPE,T2指標(biāo)類似,該類現(xiàn)象需要用其他手段來(lái)輔助決策故障信息。此外,只有在對(duì)被監(jiān)測(cè)系統(tǒng)更了解的前提下,采用PLS的故障診斷模型能夠比PCA更準(zhǔn)確、更高效。
2.2.3 基于FDA的故障診斷模型
FDA與PCA和PLS一樣也是一種利用訓(xùn)練數(shù)據(jù)構(gòu)建降維空間,再把在線數(shù)據(jù)投射到該空間,利用投射的特征參數(shù)進(jìn)行數(shù)據(jù)的故障診斷。但是,F(xiàn)DA的不同之處在于,它不僅需要正常數(shù)據(jù)的訓(xùn)練,還要有標(biāo)簽的故障工況下的數(shù)據(jù)參與訓(xùn)練[18]。如果將護(hù)欄撞擊的數(shù)據(jù)視為一種數(shù)據(jù)故障,可以人為的創(chuàng)建各種類型的撞擊事件,用采集到的數(shù)據(jù),與正常數(shù)據(jù)一起,對(duì)FDA模型進(jìn)行訓(xùn)練。
基于FDA的故障診斷模型原理如下[19]:
以前文提到的變量x(t)構(gòu)成的空間X為正常數(shù)據(jù),人為創(chuàng)建的撞擊事件監(jiān)測(cè)數(shù)據(jù),按類區(qū)分為g(t)構(gòu)建成的故障事件數(shù)據(jù)空間G,假設(shè)將G并入X,X=[x1x2…xn]T∈Rn×m,一起來(lái)訓(xùn)練FDA模型。定義數(shù)據(jù)總離散度為:其中,是n個(gè)樣本的均值向量。定義Xj為屬于第j類數(shù)據(jù)的樣本向量集合,第j類數(shù)據(jù)的類內(nèi)離散度Sj和總的類內(nèi)離散度Sw分別為:
(7)
(8)
其中,假設(shè)Sw可逆,F(xiàn)DA向量等價(jià)于:Sbwi=λiSw·wi。由于Sb的秩小于p,所以最多有p-1個(gè)非零的特征根,將計(jì)算得到的FDA向量,按列構(gòu)成投影矩陣Wp∈Rm×(p-1)。因此,樣本xi可被投影到p-1維FDA空間,得到從而對(duì)數(shù)據(jù)實(shí)現(xiàn)最優(yōu)分離。當(dāng)進(jìn)行在線監(jiān)測(cè)時(shí),將在線樣本x投影到Wp矩陣的列向量構(gòu)成的低維空間,得到樣本的FDA得分:結(jié)合文獻(xiàn)[20]的馬氏距離等度量方式,找到x所屬故障來(lái)源,實(shí)現(xiàn)故障診斷。
由于FDA在訓(xùn)練過(guò)程中把故障工況下的數(shù)據(jù)也一并考慮了,理論上其故障診斷的準(zhǔn)確性要優(yōu)于PCA和PLS,且它以滿足最小化類內(nèi)離散度、最大化類間離散度為準(zhǔn)則的同時(shí),對(duì)建模數(shù)據(jù)進(jìn)行排列,從而完成故障診斷,避免了PCA和PLS故障診斷指標(biāo)之間的不確定性。綜上分析,F(xiàn)DA更適合護(hù)欄監(jiān)測(cè)系統(tǒng)的故障診斷。
2.3 基于MSFDA的數(shù)據(jù)故障診斷模型
為了滿足實(shí)際使用需求,本研究設(shè)計(jì)了一種基于多尺度費(fèi)舍爾判別分析(MSFDA)的數(shù)據(jù)故障診斷模型。經(jīng)前文的理論分析得知FDA更適合護(hù)欄監(jiān)測(cè)系統(tǒng)的故障診斷,但上述分析中均是在假設(shè)沒(méi)有噪聲的條件下進(jìn)行的。在實(shí)際使用過(guò)程中,故障信息和部分干擾信息具有多尺度特性,因此,需要增強(qiáng)FDA的多尺度抗噪能力。本研究提出的基于MSFDA的數(shù)據(jù)故障診斷模型訓(xùn)練流程如圖3所示,在離線訓(xùn)練過(guò)程中,使用實(shí)測(cè)數(shù)據(jù),添加模擬撞擊事件產(chǎn)生的數(shù)據(jù)后,構(gòu)成樣本數(shù)據(jù),用來(lái)訓(xùn)練模型。模型利用小波的多尺度特性,將樣本數(shù)據(jù)分解后除噪;經(jīng)信號(hào)重構(gòu)后,再進(jìn)行FDA建模。

圖3 MSFDA數(shù)據(jù)故障診斷模型訓(xùn)練流程示意圖Fig.3 Schematic diagram of training process of MSFDA data fault diagnosis model
在過(guò)程監(jiān)測(cè)時(shí),對(duì)采集到相同空間大小的數(shù)據(jù)進(jìn)行小波分解后,對(duì)每一層進(jìn)行閾值除噪;再將各層信號(hào)重構(gòu),將過(guò)程變量投影至FDA故障空間并排序,利用故障分離圖將干擾信息和碰撞信息分離出來(lái)。整體流程見(jiàn)圖4。
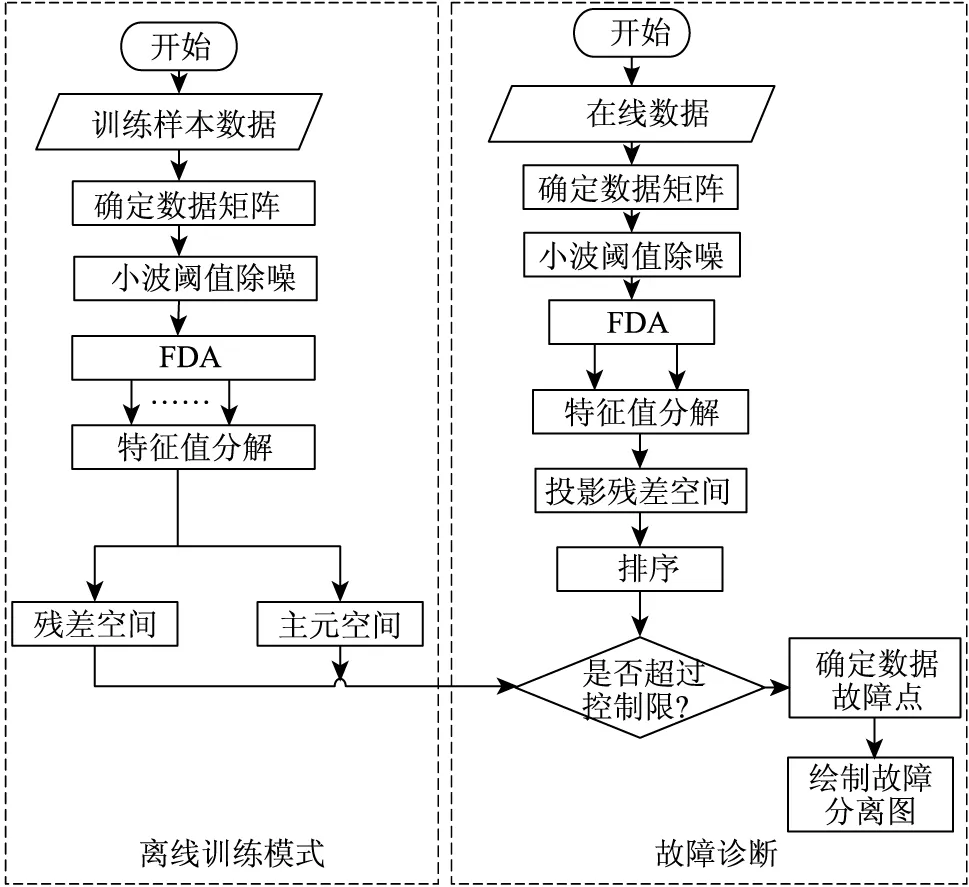
圖4 MSFDA數(shù)據(jù)故障診斷模型工作流程圖Fig.4 Flowchart of MSFDA data fault diagnosis model
3 試驗(yàn)設(shè)計(jì)及結(jié)果
為了驗(yàn)證理論分析結(jié)果并對(duì)比各類故障診斷模型的準(zhǔn)確度,設(shè)計(jì)仿真試驗(yàn),對(duì)基于PCA,PLS,F(xiàn)DA,MSFDA的數(shù)據(jù)故障診斷模型在MATLAB平臺(tái)中分別進(jìn)行仿真試驗(yàn)。各模型仿真試驗(yàn)流程如圖5所示。通過(guò)訓(xùn)練數(shù)據(jù),在MATLAB中建立各模型的殘差空間和主元空間數(shù)據(jù)庫(kù),再利用相同的輸入,作為在線數(shù)據(jù)進(jìn)行仿真在線故障診斷。根據(jù)輸出結(jié)果,對(duì)比4種模型的準(zhǔn)確度。
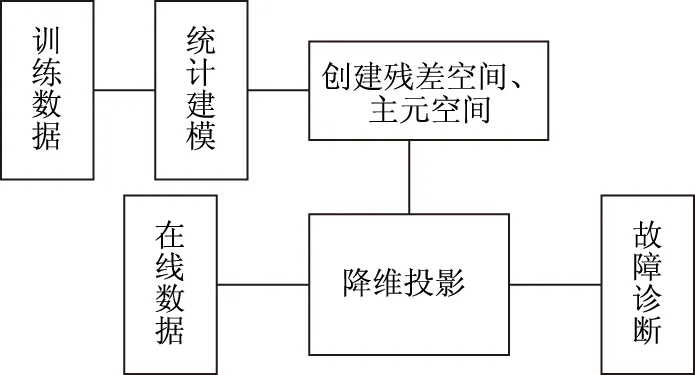
圖5 試驗(yàn)流程圖Fig.5 Flowchart of experiment
3.1 訓(xùn)練數(shù)據(jù)
訓(xùn)練數(shù)據(jù)的選擇方式和質(zhì)量會(huì)直接影響到模型的實(shí)用性和準(zhǔn)確性,因此本研究選擇采用實(shí)測(cè)數(shù)據(jù)來(lái)訓(xùn)練模型。試驗(yàn)準(zhǔn)備了2組訓(xùn)練數(shù)據(jù)。第1組訓(xùn)練數(shù)據(jù)采用前文描述的交通量較小時(shí)的實(shí)測(cè)數(shù)據(jù)。第2組訓(xùn)練數(shù)據(jù)采用模擬撞擊護(hù)欄的方法來(lái)獲取檢測(cè)數(shù)據(jù),方法為:選取相鄰的10個(gè)監(jiān)測(cè)點(diǎn),編號(hào)從S1~S10,在S2~S5之間的3段護(hù)欄,用約10 kg左右的鋼筋,隨機(jī)選位置撞擊護(hù)欄,記錄全過(guò)程的測(cè)量數(shù)據(jù)。測(cè)量數(shù)據(jù)如圖6所示,可看出,模擬撞擊實(shí)測(cè)數(shù)據(jù)中除了撞擊數(shù)據(jù)外,在監(jiān)測(cè)點(diǎn)6~10之間還出現(xiàn)了大量的不規(guī)則數(shù)據(jù),可能是噪聲,也可能是干擾信息。
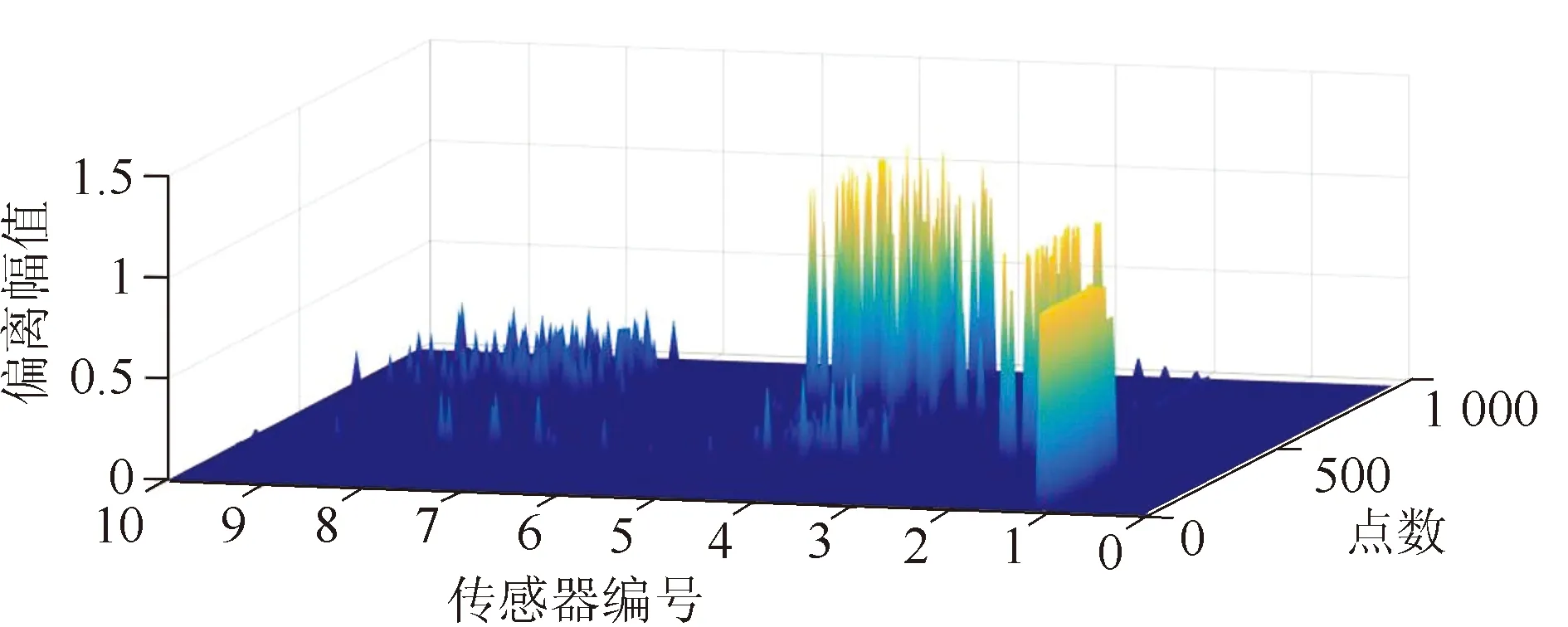
圖6 模擬撞擊實(shí)測(cè)數(shù)據(jù)展開(kāi)圖Fig.6 Expansion of measured data of impact simulation
用第1組訓(xùn)練數(shù)據(jù)訓(xùn)練基于PCA,PLS的數(shù)據(jù)故障診斷模型。用第1,2組訓(xùn)練數(shù)據(jù)訓(xùn)練基于FDA和MSFDA的數(shù)據(jù)故障診斷模型。
3.2 在線數(shù)據(jù)
在監(jiān)測(cè)點(diǎn)S1至S2之間的護(hù)欄,選擇隨機(jī)位置,采用相同方法撞擊護(hù)欄,記錄全過(guò)程測(cè)量數(shù)據(jù),作為PCA,PLS,F(xiàn)DA,MSFDA這4個(gè)故障診斷模型的輸入。
3.3 誤差指標(biāo)及定義
定義誤報(bào)率μf、漏報(bào)率μg以及故障算法準(zhǔn)確率Φ。其中,誤報(bào)率是形容某數(shù)據(jù)不是故障,但錯(cuò)報(bào)成故障的情況,漏報(bào)率形容某數(shù)據(jù)本應(yīng)該是故障,卻沒(méi)有被檢測(cè)到的情況。
計(jì)算方法如下:
(9)
式中,n為誤報(bào)數(shù)據(jù)點(diǎn)個(gè)數(shù);m為漏報(bào)點(diǎn)個(gè)數(shù);N為數(shù)據(jù)總個(gè)數(shù)。
(10)
3.4 試驗(yàn)結(jié)果及分析
3.4.1 PCA故障診斷模型仿真
基于PCA的故障診斷模型需要統(tǒng)計(jì)SPE和T2兩個(gè)指標(biāo)來(lái)實(shí)現(xiàn)故障診斷,各控制限指標(biāo)結(jié)果見(jiàn)圖7。
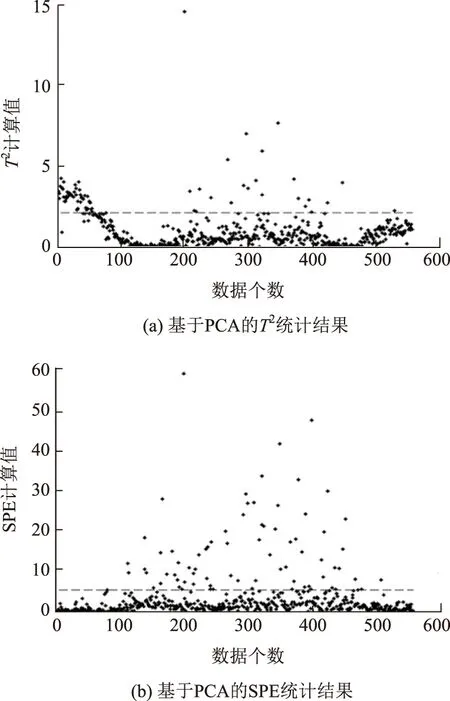
圖7 基于PCA的故障診斷T2和SPE統(tǒng)計(jì)結(jié)果Fig.7 Statistical result of T2 and SPE based on PCA
為了定位發(fā)生故障的傳感器位置,采用貢獻(xiàn)圖的方法,結(jié)果如圖8所示。
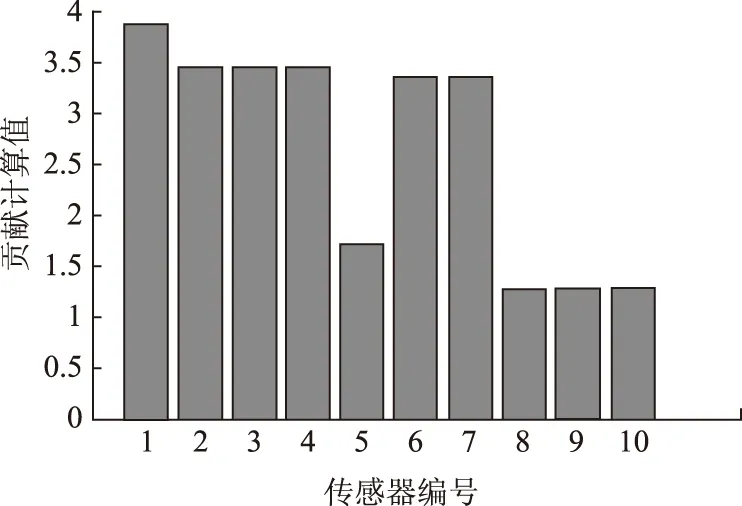
圖8 基于PCA的貢獻(xiàn)圖Fig.8 Contribution graph based on PCA
由于大量的噪聲干擾,以及在實(shí)際應(yīng)用過(guò)程中,各傳感器之間的線性關(guān)系不明顯,導(dǎo)致PCA基本無(wú)法實(shí)現(xiàn)本次試驗(yàn)的故障診斷。
3.4.2 PLS故障診斷模型仿真
基于PLS的故障診斷模型需要統(tǒng)計(jì)SPE和Q兩個(gè)指標(biāo)來(lái)實(shí)現(xiàn)故障診斷,各控制限指標(biāo)結(jié)果如圖9所示。
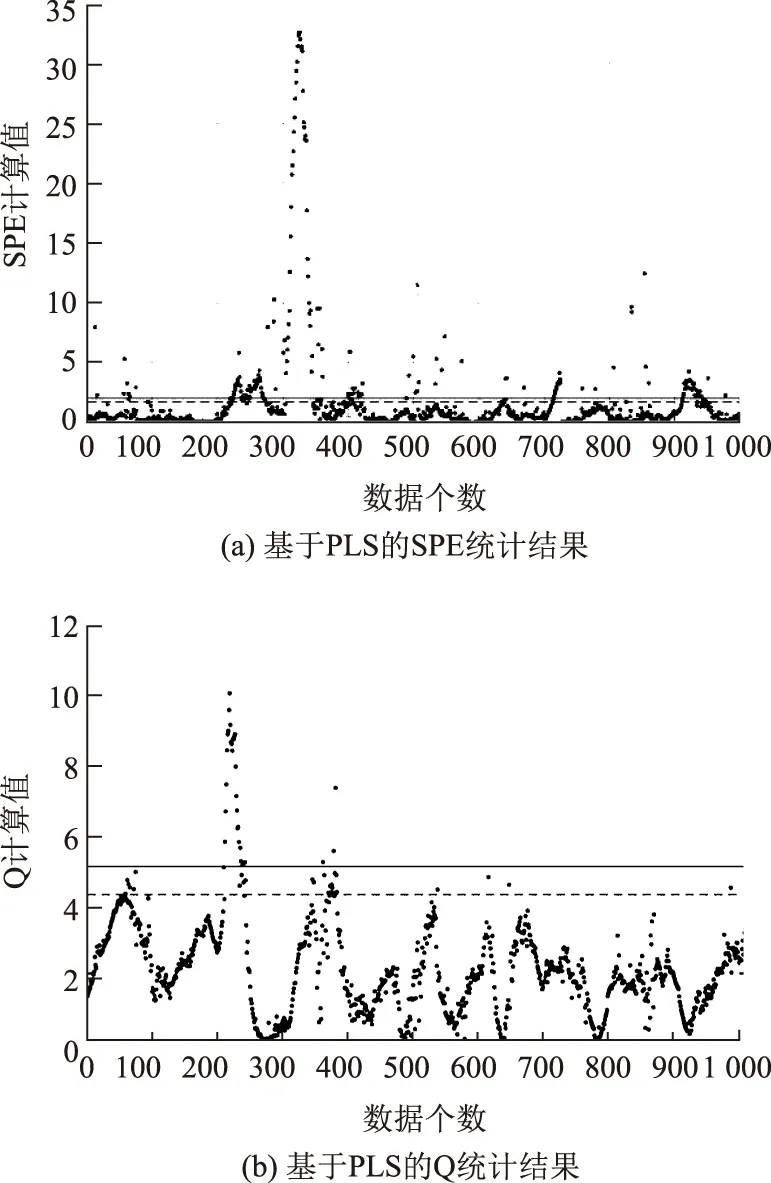
圖9 基于PLS的故障診斷SPE和Q統(tǒng)計(jì)結(jié)果Fig.9 Statistical result of SPE and Q in fault diagnosis based on PLS
為了定位發(fā)生數(shù)據(jù)故障的傳感器位置,采用貢獻(xiàn)圖的方法,結(jié)果如圖10所示。
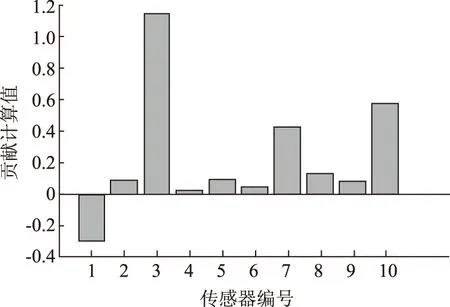
圖10 基于PLS的貢獻(xiàn)圖Fig.10 Contribution graph based on PLS
與PCA相比,PLS的故障診斷模型的準(zhǔn)確率更高,但誤報(bào)率也非常高。例如,PLS故障診斷監(jiān)測(cè)到了來(lái)自S1,S3的數(shù)據(jù)故障,但也認(rèn)為S7和S10也出現(xiàn)了數(shù)據(jù)故障,其誤報(bào)原因可能是噪聲或干擾信息導(dǎo)致。此外,與PCA相同的地方,在實(shí)際應(yīng)用過(guò)程中,各傳感器之間的線性關(guān)系不明顯,也是導(dǎo)致PLS誤報(bào)率過(guò)高的原因之一。
3.4.3 FDA故障診斷模型仿真
由于在訓(xùn)練過(guò)程中,將噪聲、故障數(shù)據(jù)與正常數(shù)據(jù)一并參與,在線性降維的過(guò)程中將噪聲也一并納入故障數(shù)據(jù)中,因此在FDA故障診斷的結(jié)果,如圖11(a)所示,出現(xiàn)了大量的離散噪聲,但由于噪聲與故障信息之間沒(méi)有線性關(guān)系,因此在利用馬氏偏移量進(jìn)行故障定位的時(shí)候,如圖11(b)所示,準(zhǔn)確的定位到S1,S2,S3發(fā)生了故障,且故障發(fā)生位置可能與S1更接近,這與模擬在線數(shù)據(jù)的情況基本一致。
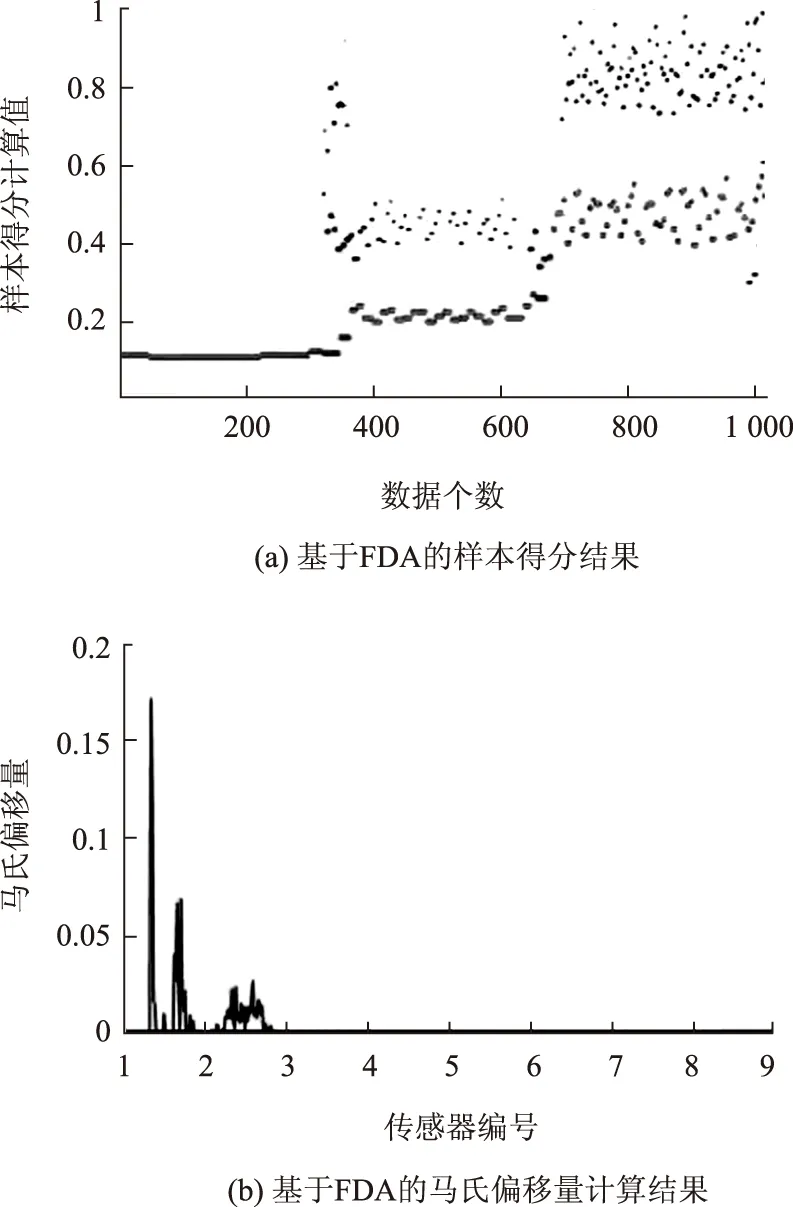
圖11 FDA故障診斷樣本得分及故障定位結(jié)果Fig.11 Fault diagnosis sample score and fault location result based on FDA
通過(guò)以上對(duì)比仿真,證實(shí)了FDA故障診斷方法,相比較PCA和PLS更適合護(hù)欄監(jiān)測(cè)。
3.4.4 MSFDA故障診斷模型仿真
為了從多尺度上降低噪聲對(duì)故障診斷的影響,采用MSFDA模型,從仿真結(jié)果上,如圖12所示,由于訓(xùn)練和模擬在線監(jiān)測(cè)的過(guò)程中,均采用了改進(jìn)的小波閾值除噪對(duì)數(shù)據(jù)進(jìn)行了預(yù)處理,因此MSFDA故障診斷中準(zhǔn)確的將故障信息分離出來(lái),并相比較FDA,更能精確的定位故障位置。
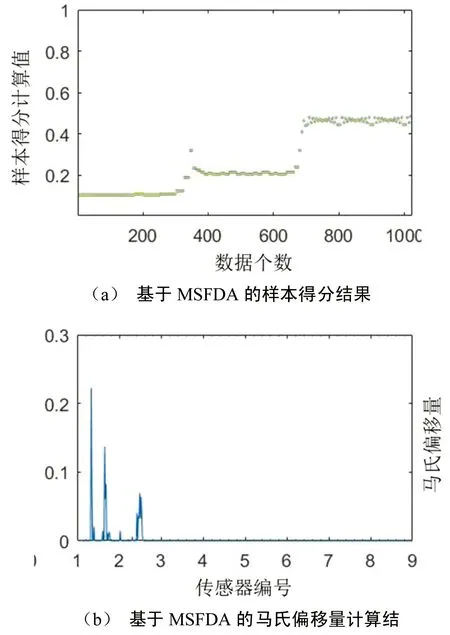
圖12 MSFDA故障診斷樣本得分及故障定位結(jié)果Fig.12 Fault diagnosis sample score and fault location result based on MSFDA
3.4.5 誤差對(duì)比結(jié)果分析
通過(guò)上述對(duì)比試驗(yàn),從直觀上證實(shí)了FDA更適合護(hù)欄監(jiān)測(cè),且MSFDA相比較FDA,故障定位能力更準(zhǔn)確。本研究還將通過(guò)量化統(tǒng)計(jì),利用各模型的誤報(bào)率、漏報(bào)率、以及算法準(zhǔn)確率,來(lái)進(jìn)行量化對(duì)比。結(jié)果如表1所示。
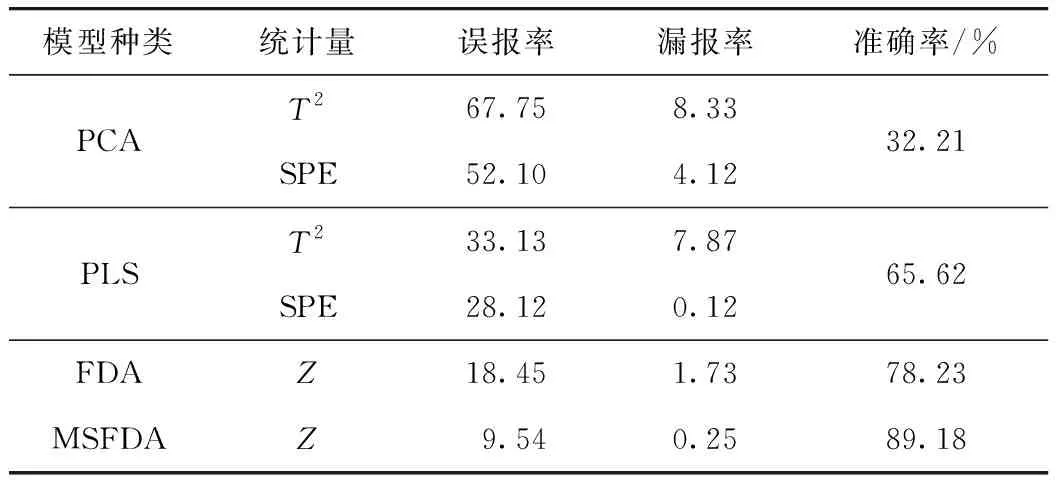
表1 故障檢測(cè)結(jié)果準(zhǔn)確率對(duì)比
從上表結(jié)果中可看出,4種方法的漏報(bào)率均保持在較低水平,但影響準(zhǔn)確率的主要因素是誤報(bào)率。在護(hù)欄監(jiān)測(cè)過(guò)程中,F(xiàn)DA相比較PCA和PLS,誤報(bào)率有大幅降低。而MSFDA比FDA,由于降低了噪聲在多尺度上對(duì)故障信息的影響,使得在誤報(bào)率和漏報(bào)率上均有優(yōu)化,準(zhǔn)確率更高。
4 結(jié)論
為了能讓高速公路波形護(hù)欄具備多維監(jiān)測(cè)、協(xié)同服務(wù)等能力,本研究作者研發(fā)團(tuán)隊(duì)研發(fā)了一種面向端邊協(xié)同的波形護(hù)欄監(jiān)測(cè)系統(tǒng),該系統(tǒng)不僅要實(shí)現(xiàn)波形護(hù)欄撞擊事件的實(shí)時(shí)監(jiān)測(cè),達(dá)到及時(shí)檢測(cè)出撞擊事件的發(fā)生,并準(zhǔn)確定位其發(fā)生的位置、區(qū)間的目標(biāo),還要具備與視頻等其他設(shè)備聯(lián)動(dòng),實(shí)現(xiàn)其他交通感知、管理及運(yùn)營(yíng)功能。因此對(duì)護(hù)欄監(jiān)測(cè)的數(shù)據(jù)要求是降低噪聲的影響、保留日常震動(dòng)干擾信息、分離撞擊類信息并實(shí)現(xiàn)其定位。而利用傳統(tǒng)的閾值法顯然不能實(shí)現(xiàn)該要求,但是基于數(shù)據(jù)驅(qū)動(dòng)的故障診斷方法只需要利用海量的帶故障標(biāo)記的過(guò)程數(shù)據(jù)或不帶標(biāo)記的正常數(shù)據(jù)來(lái)建立投影空間,再將在線數(shù)據(jù)投影至該空間中,最終利用統(tǒng)計(jì)指標(biāo)來(lái)完成實(shí)時(shí)數(shù)據(jù)的故障診斷。由于沒(méi)有該類研究的參考,本研究通過(guò)理論分析和仿真對(duì)比試驗(yàn),驗(yàn)證了數(shù)據(jù)驅(qū)動(dòng)中,基于多元統(tǒng)計(jì)類方法中,F(xiàn)DA比PCA和PLS更適合護(hù)欄監(jiān)測(cè)。但在試驗(yàn)過(guò)程中也發(fā)現(xiàn)了,這3種方法的抗噪能力均不強(qiáng),因此引入了數(shù)據(jù)驅(qū)動(dòng)方法中的小波分析法,并在前期的研究基礎(chǔ)上,根據(jù)波形護(hù)欄原始數(shù)據(jù)中,噪聲在多尺度上掩蓋了有用數(shù)據(jù)的特性上,改進(jìn)了小波閾值算法,將該算法與FDA結(jié)合,形成了MSFDA故障診斷模型。最終,試驗(yàn)結(jié)果表明相比較PCA,PLS,F(xiàn)DA,本研究得到的MSFDA算法,可顯著提高該系統(tǒng)的抗噪、抗干擾能力,準(zhǔn)確率更高。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
