塑料垃圾智能回收裝置的設計研究
2021-05-16 10:33:38張雅楠丁治中舒詩琦
科學技術創新 2021年13期
張雅楠 丁治中,2 舒詩琦 陳 俊 胡 嬌
(1、河海大學 機電工程學院,江蘇 常州213022 2、蘇州大學 藝術學院,江蘇 蘇州215123)
隨著我國電商行業的繁榮、快遞業的不斷發展,包裝材料垃圾與日俱增。根據《2020 年11 月中國快遞發展指數報告》顯示,1-11 月,全國預計完成快遞業務量742 億件。如何對快遞包裝垃圾回收成為快遞業的重要問題,也是現在社會亟待解決的重要問題。塑料垃圾是快遞垃圾中除紙質垃圾外占比最大的垃圾種類,其主要體現在快遞外包裝捆綁用的膠帶以及填充物。塑料垃圾存在污染性高、質感輕盈不便運輸、體積過大導致垃圾回收裝置空間利用率低、回收利用率低等問題。為解決塑料垃圾難處理的問題,推進行綠色轉型,更好實現我國達成“碳中和”[1]的目標,本文設計一款專門處理塑料垃圾的智能垃圾回收裝置。
1 塑料垃圾智能回收裝置的功能分析
1.1 智能垃圾回收裝置的相關研究
目前對智能垃圾回收裝置的研究與設計有很多,多是集中在富有產品語義的垃圾回收裝置形態設計[2]、機器視覺和互聯網技術的垃圾回收裝置及其系統的智能性[3]上,對于不同種類的垃圾還未有針對性的智能回收裝置的研究。機器識別的智能性很高,但由于其操作時間較長,用戶在使用過程中需要長時間等待,這造成了用戶體驗較差,不愿使用或嘗試相似產品,裝置難以在實際小區中得以推廣。加上機器視覺學習技術的成本較高,在智能垃圾回收裝置還未形成產業鏈之際,多數小區物業對于購進智能垃圾回收裝置較為乏力,這也是難以在我國進行大范圍應用的關鍵。目前我國的智能垃圾回收裝置多針對可回收垃圾,采取互聯網積分制,但是在采訪中發現,顯示屏常處于提示已滿狀態,后續用戶無法繼續投放垃圾,裝置的空間利用率低,可回收垃圾清運頻率低。
1.2 塑料垃圾智能回收裝置的設計思路
基于市場調研與分析,本文主要決定從以下角度進行改良設計:
1.2.1 引導用戶了解塑料垃圾回收,提高居民的參與度;
1.2.2 保證垃圾回收裝置的潔凈性及耐久度;1.2.3 增加塑料垃圾回收裝置的空間利用率;1.2.4 將塑料垃圾打包處理,更加智能化;1.2.5 利用人機工程學討論設備局部尺寸,提升用戶體驗。
1.2.6 選取合適技術,控制成本。根據設計角度,從設計需求出發,結合可能使用到的技術進行梳理,對應設計改良點對后續的裝置設計進行更進一步的分析(表1)。
2 塑料垃圾智能回收裝置設計
2.1 塑料垃圾智能回收裝置的部分人機尺寸關系
要通過配置合理尺寸的塑料垃圾智能回收裝置來提升用戶參與度,依照站姿雙臂作業近身空間的原則,取箱體高度為≤187.5cm,以保證箱體不會太高導致用戶產生壓迫感;取垃圾回收口的高度為100cm≤垃圾回收口的高度≤125cm;由于顯示屏作為一種控制界面,屬于視覺信息作業界面,本設備的顯示屏應屬于固定屏,俯首仰首最大角度不超過15°,以防止頸椎疲勞;取顯示屏的高度為137.5cm≤顯示屏的高度≤175cm。

表1 塑料垃圾智能回收裝置的設計思路分析
2.2 塑料垃圾智能回收裝置的內部原理設計
根據前文分析,對塑料垃圾智能回收裝置的運行機理和流程可進行如下描述:用戶可通過觸摸屏登陸自己賬號,選擇投放垃圾后,投料口的電子鎖處于開鎖狀態,此時用戶可投入塑料垃圾。塑料垃圾被投入后由粉碎機構對其進行切割處理,為了保障用戶使用的安全,需要粉碎機構與用戶之間形成一定高度差,并形成塑料垃圾的臨時存儲空間。在機器開始粉碎之后,落入收納粉碎后塑料垃圾的熱壓倉內,當熱壓倉處于滿載狀態時,通過橫向和縱向的熱壓裝置對塑料垃圾進行壓縮并輕微加熱至表面融化形成塊狀體。同時,下方與熱壓倉相連的柜門有電子鎖,平時處于上鎖狀態,當回收人員進行回收身份驗證時,柜門方可打開。由于塑料垃圾智能回收裝置的設計有熱壓環節,因此有散熱孔時必要的,如熱量過大還可增加散熱機構用風扇對裝置進行降溫。為避免用戶在裝置已滿的狀態下,仍走到裝置前進行操作,在裝置頂部設置有指示燈,當機器不能運作或容量已滿狀態時,會呈現紅色。在熱壓倉已滿時,會及時通過網絡發送相關信息給回收人員,由回收人員根據具體裝置滿載情況進行針對性清運。具體塑料垃圾智能回收裝置的運作流程如圖1 所示。
根據運作流程的分析結果,對塑料垃圾智能回收裝置的結構進行細化[4]:裝置主要包括箱體、觸摸顯示屏、電子倉、投遞臨時存儲倉、粉碎機構、熱壓倉、垃圾出口柜門以及散熱口。觸摸顯示屏位于電子倉的外壁前端但處于內縮狀態,避免雨水對電子部件的侵蝕;電子倉、投遞臨時存儲倉、粉碎機構和熱壓倉均設置在箱體內部。電子倉位于箱體上部空腔;投遞臨時存儲倉位于電子倉下方用于存儲剛投入還未被粉碎的塑料垃圾;粉碎機構位于投遞臨時存儲倉的下料口的下方并處于裝置后端,避免垃圾投放者將手伸入造成不必要的安全隱患;熱壓倉設置在粉碎機構的出料口下方,可用于儲存被粉碎的塑料垃圾,并對其進行壓縮加熱成塊處理;垃圾出口柜門設置在箱體外壁的下部并于熱壓倉相連;箱體外壁上設有若干散熱孔,箱體的外壁頂部設有指示燈。其中,電子倉內設有電源和中央處理器,電源與各用電裝置電性連接,為各用電結構供電,以保證裝置的正常運行。中央處理器安裝在觸摸顯示屏背面主板上,通過數據接口與觸摸顯示屏連接,用于與觸摸顯示屏進行信息的接收與反饋,當觸摸顯示屏識別使用者身份之后,會發布指令打開不同的電子鎖,此時用戶方可進行下一步操作。對于垃圾投放者,投料口的電子鎖上安裝有感應器,當塑料垃圾被用戶投入時,感應器向CPU 發出消息,此時CPU 對粉碎機構發布指令要求其開始進入粉碎待機狀態,當塑料垃圾落入粉碎機構上方,用戶合上投料板時,粉碎機構開始運行。另外,中央控制器會根據熱壓倉內的紅外線感應裝置反饋的信息判定熱壓倉內容量是否處于較慢狀態需要進行壓縮成塊處理。中央控制器在塑料垃圾已壓縮成塊后會發出指令讓指示燈的顏色發生改變,并同時通過網絡對回收人員發布具體機型及所在地點已滿的信息,及時告知回收人員對已壓縮好的垃圾塊進行回收,如圖2。熱壓倉包括縱向熱壓裝置、橫向熱壓裝置和塊狀垃圾重量傳感器,縱向熱壓裝置安裝在熱壓倉頂部,橫向熱壓裝置安裝熱壓倉后側,重量傳感器安裝在熱壓倉底部。縱向熱壓裝置、橫向熱壓裝置分別與所述中央處理器控制連接,由于粉碎機構在裝置后方,塑料垃圾可能呈現前少后多的趨勢。因此當每次粉碎機構粉碎完塑料垃圾停止運轉時,CPU 會控制橫向熱壓裝置處于不發熱狀態將塑料垃圾推至垃圾塊取出柜門附近,縱向熱壓裝置會向下施力減少因塑料蓬松而導致的內部空間利用率低下。當被反復壓縮后的塑料垃圾超過內部容量可壓縮標度最大值時,CPU 會發布指令讓熱壓裝置對其進行加熱融化表面并更進一步壓縮,以保證塑料垃圾可以形成塊體,便于回收人員車輛運輸。針對用戶的積分政策,為與熱壓倉底部的重量傳感器與所述中央處理器連接,可進行每次投入垃圾的重量差額計算進行反饋,同時告訴用戶減少的碳排放量,激發用戶使用塑料垃圾智能回收裝置的積極性。
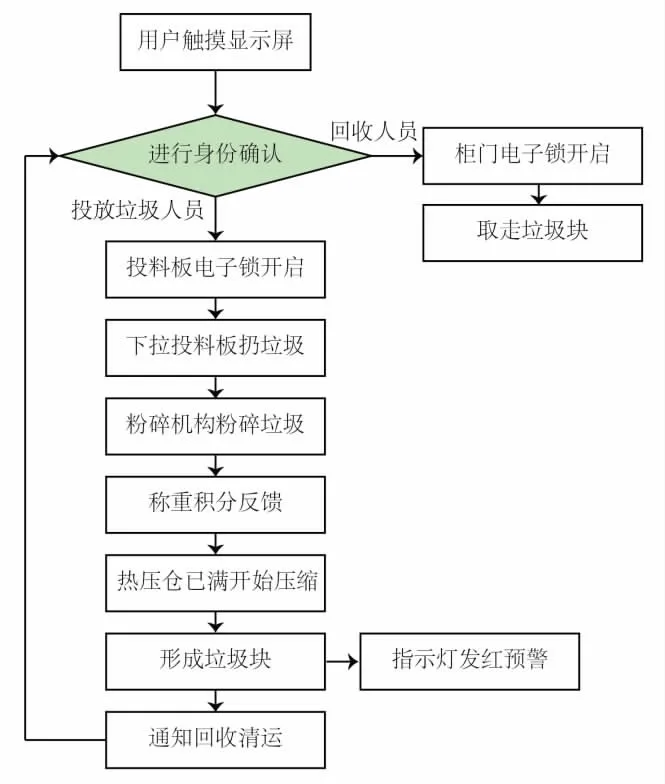
圖1 塑料垃圾智能回收裝置運作流程圖
3 結論
對比智能垃圾回收裝置,可以看出本設計具備以下優勢:(1)裝置平時處于密閉狀態,不會產生異味。(2)嚴格根據用戶身份進行電子鎖開合控制,保證裝置的安全性和完好性。(3)裝置將垃圾進行臨時存儲再進行粉碎保證用戶投遞緩沖時間,并減少因用戶錯誤伸手進投料口而造成的安全事故。(4)裝置對垃圾進行熱壓減小垃圾體積,增大裝置的內部空間利用率且成為塊狀方便運輸;(5)裝置可與用戶產生更多互動和反饋,調動用戶的積極性,明確垃圾分類;(6)是針對塑料垃圾的一款針對性設計方案,從設施上實現垃圾分類,更具有切實可行性。
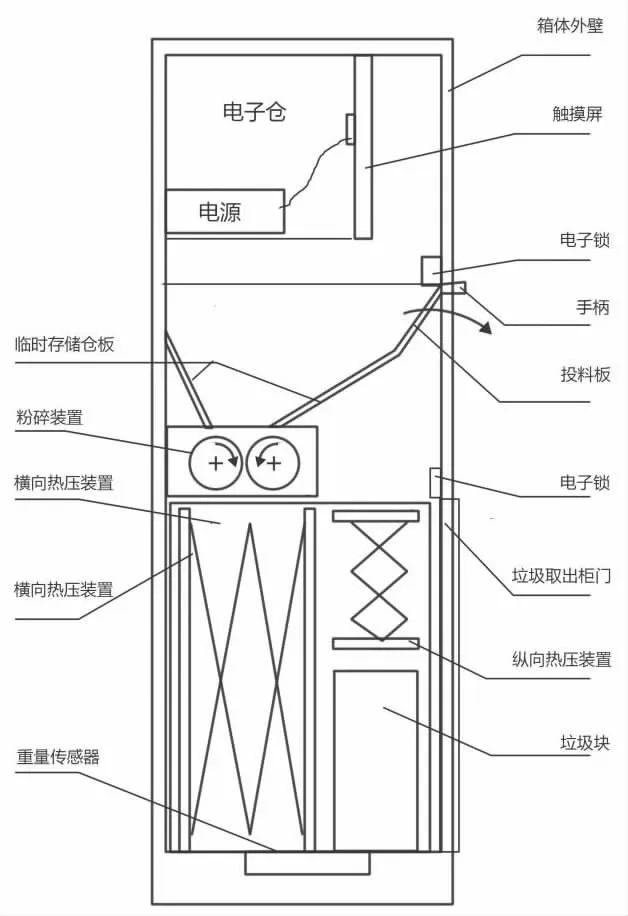
圖2 塑料垃圾智能回收裝置內部原理示意圖
事實上,根據垃圾不同開始從垃圾回收裝置地種類細分對于用戶正確地投放垃圾具有引導作用,合理有針對性地設計方案能夠更好地被用戶所接受和使用。針對智能垃圾回收裝置的研究和推廣,還需要后續更多研究人員和相關廠家共同攜手開發,為打好我國垃圾分類攻堅戰獻計獻策,為實現我國可持續發展而奮斗。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
