GLONAS S 單雙頻偽距單點定位精度分析
2021-05-16 09:23:48李柯樺陳永福
經緯天地 2021年1期
李柯樺 陳永福
(云南省測繪工程院,云南 昆明 650031)
0.引言
俄羅斯的格洛納斯(GLONASS)系統是繼美國GPS系統第二個投入使用的全球衛星定位系統,于2009年開通全球定位服務,目前在軌衛星共計24顆,能提供G1、G2、G3三個頻率信號,但由于技術問題以及接收機硬件限制,全球跟蹤站大部分接收機只能接收到G1和G2兩個頻率[1-3]。偽距單點定位是根據偽距觀測值,利用單臺接收機,實現米級甚至分米級定位技術,該技術目前發展比較成熟,在車輛、船舶、飛機等領域被廣泛應用[4-6]。當前國內學者單獨分析GLONASS定位性能的較少,主要集中在多系統組合定位性能分析方面,文獻[7]分析GPS/BDS/GLONASS三系統組合偽距單點定位精度,發現雙系統組合相比單系統在衛星可見數、PDOP值以及定位精度方面都有較大改善,而三系統組合相比雙系統又有較大改善。文獻[8]表明美國對俄羅斯衛星部件的限制將影響GLONASS定位性能,在GLONASS新老衛星交替之際,其定位性能將會受到很大影響。文獻[9]評估了亞太地區GPS/GLONASS/Galileo/BDS組合實時精密單點定位性能,發現與GPS單系統精密單點定位于收斂時間相比較,四系統組合定位精度與收斂時間有很大改善,靜態精密單點定位在E方向、N方向、U方向收斂時間分別改善了43%、19%、26%,定位精度分別改善了16%、25%、10%,動態精密單點定位在E方向、N方向、U方向收斂時間分別改善了61%、35%、51%,定位精度分別改善了29%、30%、21%。文獻[10]分析了GLONASS星載鐘性能,發現GLONASS星載銫鐘的頻率準確度在10-13~10-12量級,頻率漂移率小于1×10-14/d,日穩定度優于1×10-13。
GLONASS作為全球四大衛星導航定位系統之一,對其定位性能分析是十分必要的。本文基于歐洲、中國以及澳大利亞地區各一個連續跟蹤站GLONASS系統G1/G2雙頻數據,詳細分析了該系統G1、G2單頻,G1/G2組合雙頻偽距單點定位精度。
1.GLONASS 系統偽距單點定位模型
單點定位是通過后方交會原理實現的,通常在實際應用中所說的偽距單點定位是單頻偽距單點定位,一般單頻偽距單點定位觀測值模型表示如公式(1)[11-13]:

式中,Pi表示偽距觀測值;i表示頻率;r表示測站接收機;s表示衛星;(Xi,Yi,Zi)表示衛星在空中位置坐標;(X,Y,Z)表示接收機位置坐標;c表示真空中光的速度;dtr表示接收機鐘差;dts表示衛星鐘差;Vion表示電離層延遲誤差;Vtrop表示對流層延遲誤差;δi表示星歷誤差;δmul表示多路徑效應誤差;εi表示觀測噪聲。
在進行GLONASS單頻偽距單點定位時,電離層延遲誤差和對流層延遲誤差分別通過Klobucha模型和Saastamoinen模型進行改正。雙頻組合偽距單點定位常用的模型為雙頻無電離層組合模型,一般表示如公式(2)和公式(3)[14,15]:
式中,1、2表示頻率號;a,b表示雙頻無電離層組合系數;f表示頻率。
2.試驗數據分析
為詳細分析GLONASS系統G1、G2單頻,G1/G2組合雙頻偽距單點定位精度,以MGEX結構發布的觀測數據為試驗解算數據,選取數據的時間段為2020年3月4日全天24h,數據采樣頻率為30s,具體信息(如表1所示)。GLONASS系統數據質量的好壞直接影響其定位精度的高低,因此在進行定位數據解算前對其數據質量進行評估是非常必要的。本文首先評估GLONASS系統G1頻率和G2頻率的數據質量,然后分析其定位精度。
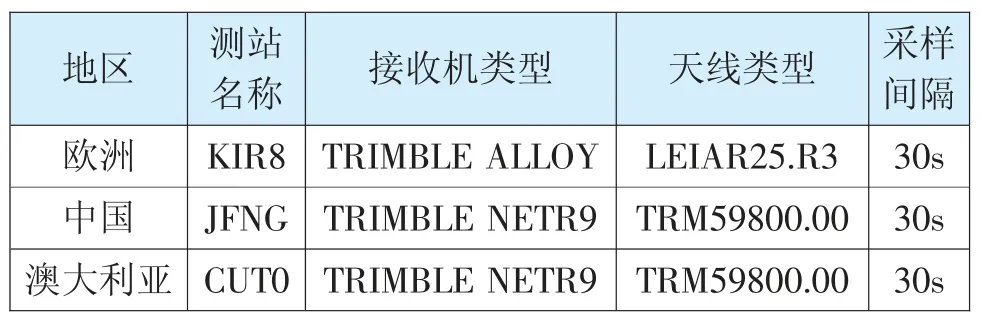
表1 各連續跟蹤站詳細信息
2.1 數據質量評估
數據質量很大程度上決定導航定位的準確性和可靠性,如果數據質量過差,則不能進行數據解算,常規的數據質量評估指標主要有數據完整率、信噪比、多路徑以及周跳比。本文選取信噪比以及多路徑兩項數據質量評估指標進行GLONASS系統G1頻率和G2頻率數據質量評估。
信噪比是觀測信號強度與噪聲的比值,信噪比越大,表明觀測信號強度越強,信噪比可以直接從觀測文件中獲取[16]。根據獲取的信噪比,計算得到G1頻率和G2頻率信噪比和高度角的關系(如圖1所示):
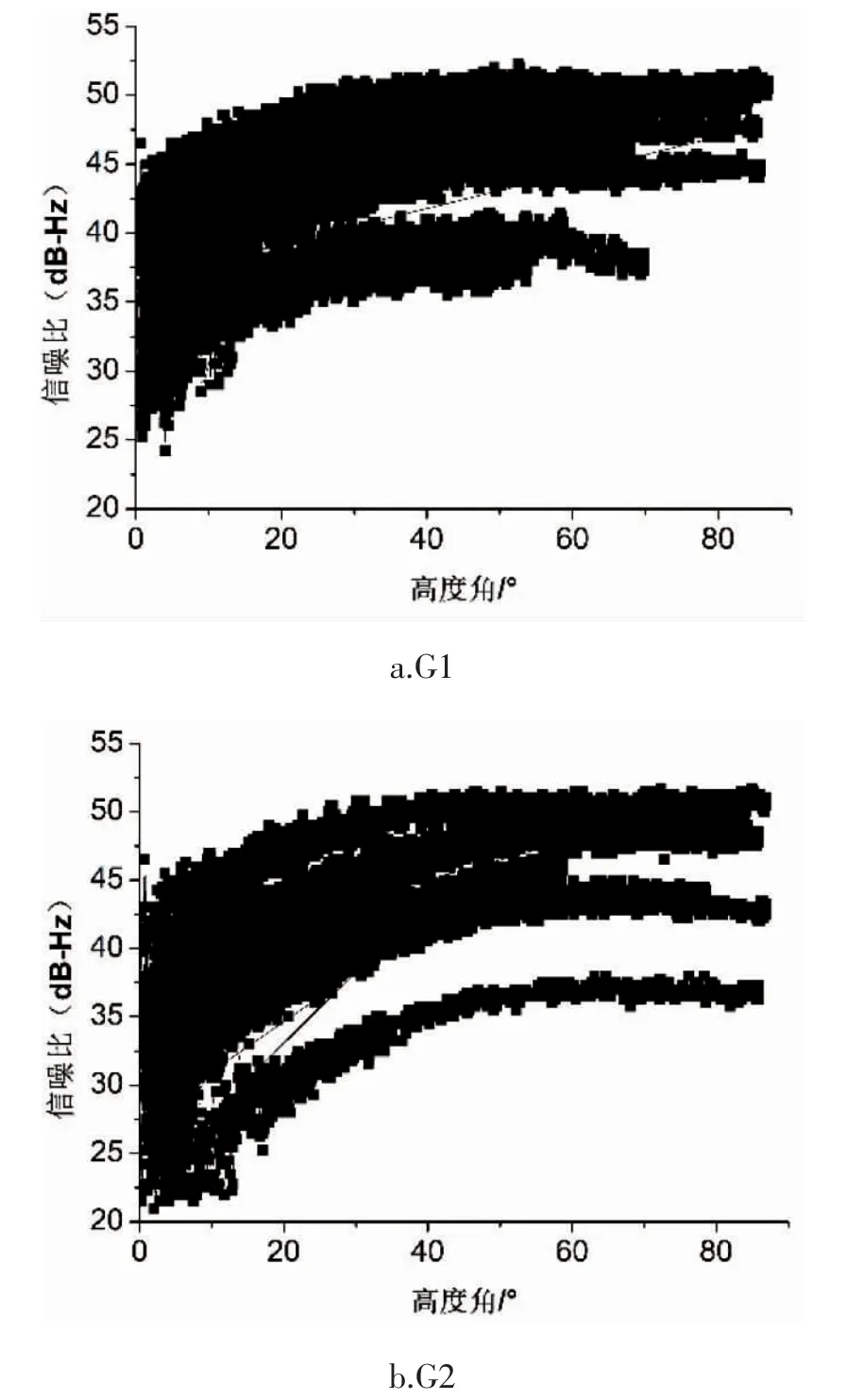
圖1 GLONASS系統G1頻率和G1頻率信噪比
GLONASS系統G1和G2兩個頻率信噪比隨著高度角的增加而增加,個別衛星的信噪比較低,但大多數衛星的信噪比增加至53dB-Hz左右而停止,表明G1和G2兩個頻率信號強度較強。
多路徑是接收機除接收到衛星直接發射的信號外,還會接收到經過各種地物反射的信號,多種信號疊加而產生的延遲[17,18]。計算得到GLONASS系統G1頻率和G2頻率的多路徑(如圖2所示):
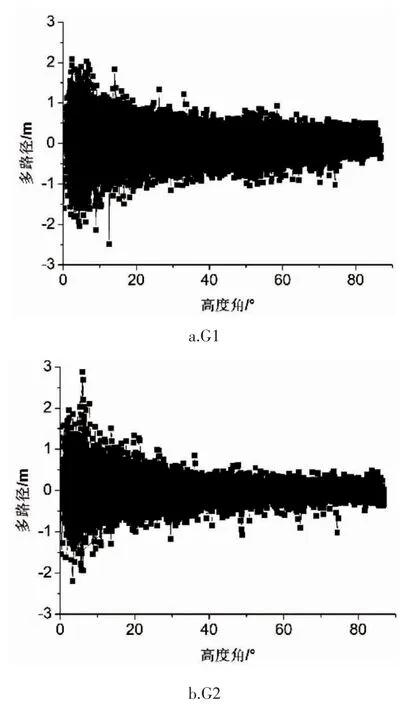
圖2 GLONASS系統G1頻率和G1頻率多路徑
GLONASS系統G1頻率和G2頻率多路徑整體在±3m以內,隨著高度角的增加而減小,當高度角接近90°時,兩個頻率的多路徑趨于±1m以內,并且未觀測到與高度角有關的系統偏差。
2.2 定位結果分析
在進行數據解算時,采用東京海洋大學開發的RTKLIB軟件進行數據解算,首先根據常規單頻偽距單點定位模型解算得到G1頻率、G2頻率單頻單歷元坐標值,然后采用雙頻無電離層組合模型解算得到G1/G2雙頻組合偽距單點定位單歷元坐標,最后以IGS中心提供的周解算坐標作為參考值,算得到不同頻率下的定位誤差,計算順序為KIR8連續跟蹤站、JFNG連續跟蹤站、CUT0連續跟蹤站。
可見衛星數與PDOP值都是GNSS定位中常見的分析指標,若可見衛星數少于4顆,則不能進行定位,相反衛星可見數越多,定位精度越高,計算得到的PDOP值越小,解算得到的定位精度越高。首先計算得到KIR8連續跟蹤站、JFNG連續跟蹤站、CUT0連續跟蹤站GLONASS系統不同連續跟蹤站衛星可見數與PDOP值(如圖3、圖4所示):
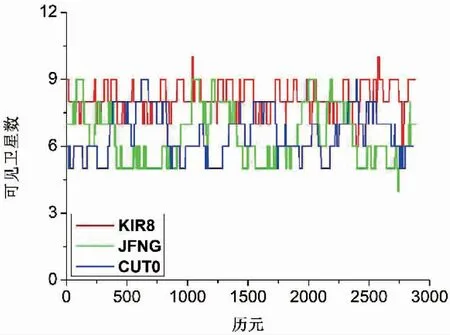
圖3 衛星可見數
位于歐洲地區的KIR8站衛星可見數變化比較平穩,在7-9顆之內變化,位于中國地區的JFNG站與位于澳大利亞地區的CUT0站可見衛星數變化較大,且變化范圍一致,在5-9顆之內變化。
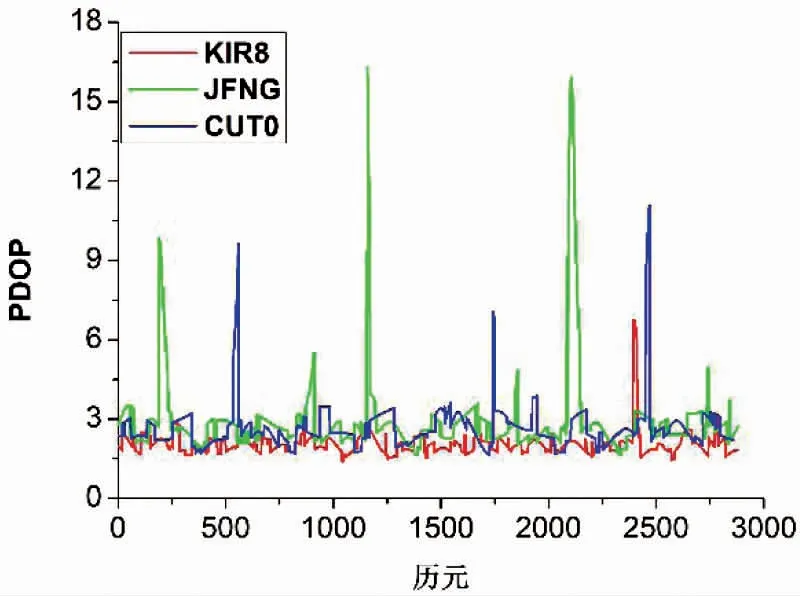
圖4 PDOP值
位于歐洲地區的KIR8站PDOP值變化比較平穩,除位于2500歷元左右突然變大外,整體PDOP值小于3,而位于中國地區的JFNG站與位于澳大利亞地區的CUT0站的PDOP值較KIR8站較大,且突變點較多,JFNG站PDOP值最大達到了17,CUT0站PDOP值最大達到了11。
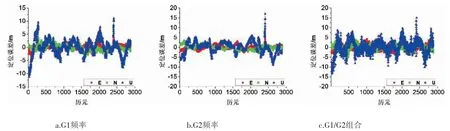
圖5 KIR8連續跟蹤站GLONASS系統單頻偽距單點定位誤差
如圖5所示,KIR8連續跟蹤站GLONASS系統G1頻率偽距單點定位E方向和N方向定位誤差變化情況相當,都在±5m范圍內變化,U方向的定位誤差相比E和N方向較大,在±15m范圍內變化。G2頻率偽距單點定位三個方向的定位誤差表現出不一致性,N方向定位誤差最小,在±4m范圍內變化,其次是E方向定位誤差,在±6m范圍內變化,U方向定位誤差最大,在±20m范圍內變化。GLONASS系統G1/G2雙頻組合頻率偽距單點定位E方向和N方向定位誤差相比單頻定位誤差較大,在±6m范圍內變化,U方向定位誤差與單頻U方向定位誤差相當,在±18m范圍內變化。
根據計算得到GLONASS系統G1頻率、G2頻率、G1/G2組合頻率的定位誤差,計算得到E方向、N方向、U方向的定位精度(RMS)、平均衛星數以及平均PDOP值(如表2所示):
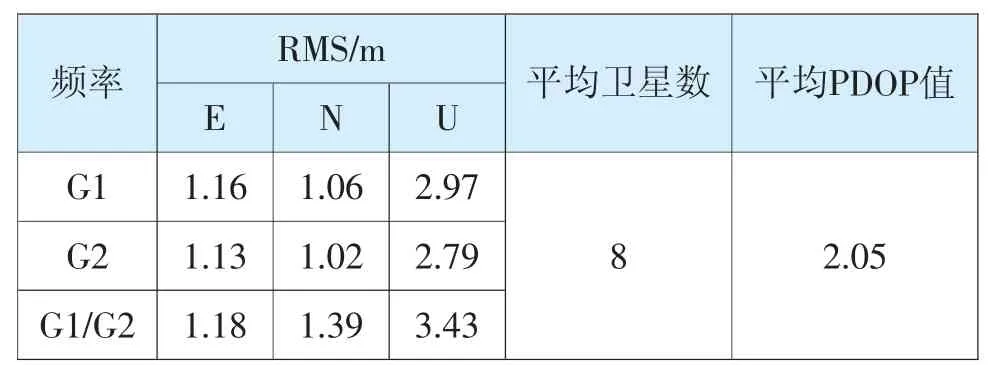
表2 KIR8站GLONASS系統單雙頻偽距單點定位結果統計
KIR8連續跟蹤站G2頻率偽距單點定位精度相比于G1頻率偽距單點定位精度略高,GLONASS系統的平均衛星可見數完全滿足一般定位要求,達到了8顆,平均PDOP值也滿足一般情況衛星空間分布情況要求,為2.05。G1頻率偽距單點定位精度E方向和N方向定位精度較高,優于1.2m,U方向定位精度略差,優于3m。
G2頻率偽距單點定位E方向和N方向精度與G1頻率相當,優于1.2m,U方向定位精度也相差不大,優于3m。GLONASS系統G1/G2組合偽距單點定位精度低于G1、G2頻率精度,E方向定位精度達到了1.18m、N方向定位精度達到了1.39m、U方向定位精度達到了3.43m。
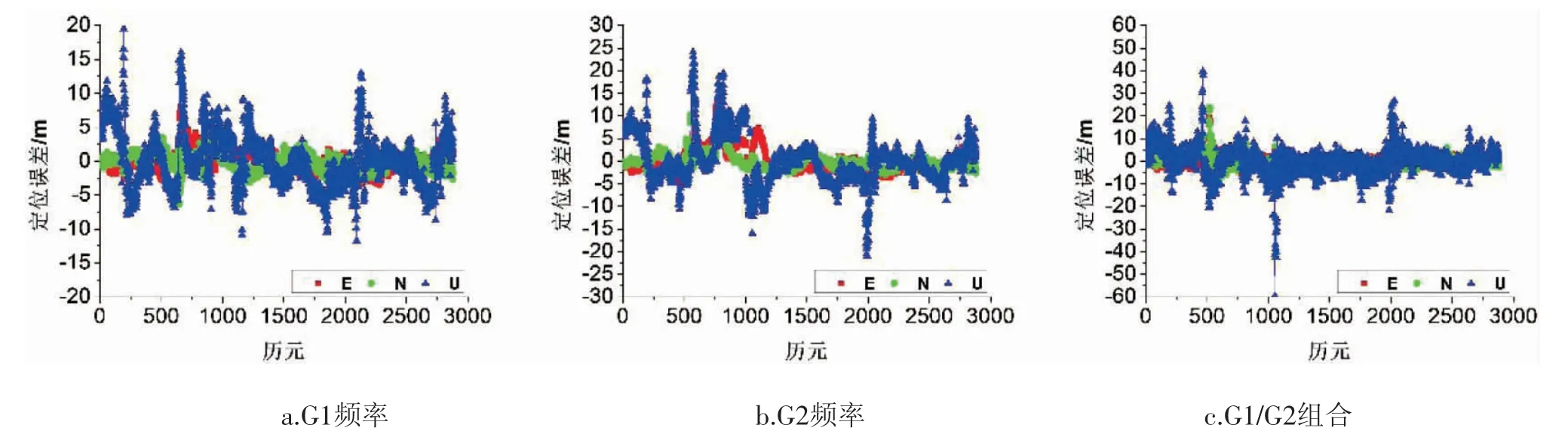
圖6 JFNG連續跟蹤站GLONASS系統單頻偽距單點定位誤差
如圖6所示,JFNG連續跟蹤站GLONASS系統G1頻率偽距單點定位E方向定位誤差在±10m之內變化、N方向定位誤差在±10m之內變化、U方向定位誤差在±20m之內變化,G2頻率偽距單點定位E方向定位誤差在±15m之內變化、N方向定位誤差在±15m之內變化、U方向定位誤差在±30m之內變化。GLONASS系統G1/G2雙頻組合頻率偽距單點定位E方向定位誤差在±30m之內變化、N方向定位誤差在±30m之內變化、U方向定位誤差在±60m之內變化。
根據計算得到GLONASS系統G1頻率、G2頻率、G1/G2組合頻率的定位誤差,計算得到E方向、N方向、U方向的定位精度(RMS)、平均衛星數以及平均PDOP值(如表3所示):
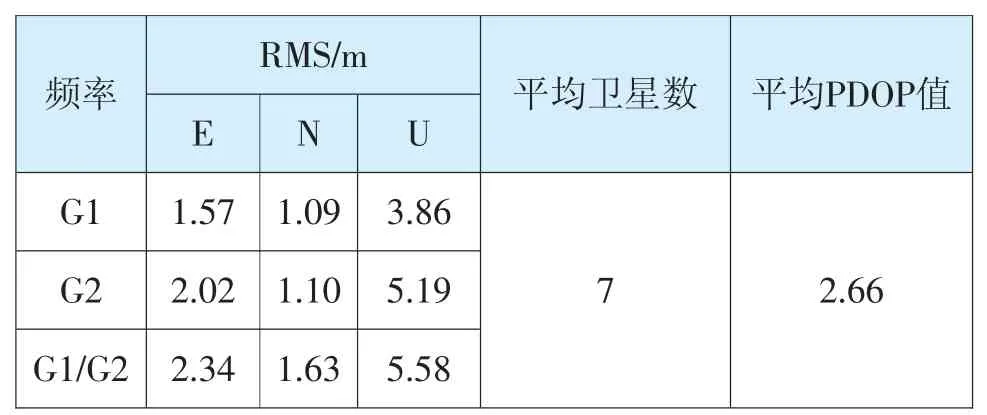
表3 JFNG站GLONASS系統單雙頻偽距單點定位結果統計
JFNG連續跟蹤站G1頻率偽距單點定位精度相比于G2頻率偽距單點定位精度略高,可能由于所選測站區域原因,GLONASS系統平均衛星可見數只有6顆,平均PDOP值較大,為2.92。G1頻率偽距單點定位精度三個方向定位精度相差較大,其中E方向定位精度最高,優于1.3m,其次為N方向定位精度,優于1.7m,U方向定位精度最差,優于4m。G2頻率偽距單點定位三個方向定位精度的高度次序與G1頻率相當,分別為E方向精度優于2m、N方向精度優于3m、U方向精度優于6m。GLONASS系統G1/G2組合偽距單點定位精度低于G1、G2頻率精度,E方向定位精度達到了2.17m、N方向定位精度達到了1.89m、U方向定位精度達到了6.10m。
如圖7所示,CUT0連續跟蹤站GLONASS系統G1頻率偽距單點定位E方向定位誤差在±6m之內變化、N方向定位誤差在±6m之內變化、U方向定位誤差在±30m之內變化,G2頻率偽距單點定位E方向定位誤差在±10m之內變化、N方向定位誤差在±10m之內變化、U方向定位誤差在±30m之內變化。GLONASS系統G1/G2雙頻組合頻率偽距單點定位E方向定位誤差在±15m之內變化、N方向定位誤差在±15m之內變化、U方向定位誤差在±35m之內變化。
圖7 CUT0連續跟蹤站GLONASS系統單頻偽距單點定位誤差
根據計算得到GLONASS系統G1頻率、G2頻率、G1/G2組合頻率的定位誤差,計算得到E方向、N方向、U方向的定位精度(RMS)、平均衛星數以及平均PDOP值(如表4所示):
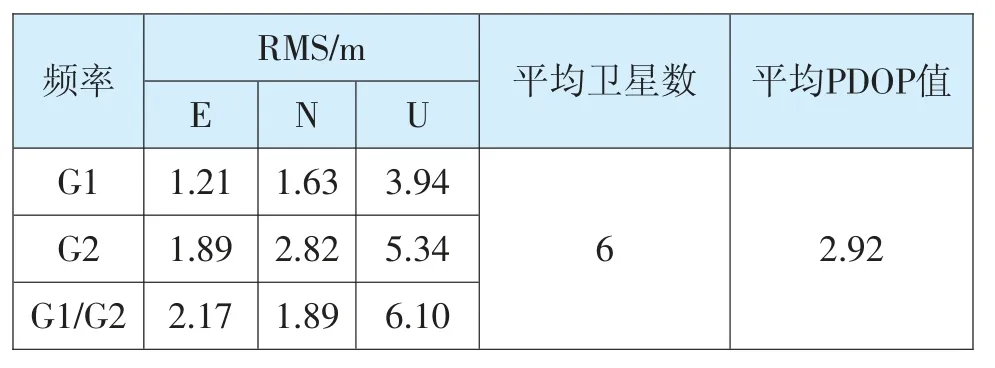
表4 CUT0站GLONASS系統單雙頻偽距單點定位結果統計
CUT0連續跟蹤站G1頻率偽距單點定位精度相比于G2頻率偽距單點定位精度略高,可能由于所選測站區域原因,GLONASS系統平均衛星可見數只有7顆,平均PDOP值較大,為2.66。G1頻率偽距單點定位精度三個方向定位精度相差較大,其中N方向定位精度最高,優于1.1m,其次為E方向定位精度,優于1.6m,U方向定位精度最差,優于4m。G2頻率偽距單點定位三個方向定位精度的高度次序與G1頻率相當,分別為N方向精度優于1.2m、E方向精度優于2.1m、U方向精度優于6m。GLONASS系統G1/G2組合偽距單點定位精度低于G1、G2頻率精度,E方向定位精度達到了2.34m、N方向定位精度達到了1.63m、U方向定位精度達到了5.58m。
3.結束語
本文基于歐洲地區、中國地區以及澳大利亞地區IGS連續跟蹤站GLONASS系統雙頻數據,首先評估了GLONASS系統雙頻數據質量,然后分析了GLONASS系統單雙頻偽距單點定位精度,經研究發現:(1)GLONASS系統雙頻數據質量良好,衛星顆見數與衛星空間幾何構型較優,且呈現周期性變化,同時發現歐洲地區GLONASS系統衛星可見數與衛星可見構型優于中國地區與澳大利亞地區,中國地區與澳大利亞地區的可見數衛星數與衛星空間構型相當;(2)歐洲地區GLONASS系統G2頻率的偽距單點定位精度略優于G1頻率,中國地區與澳大利亞地區G1頻率的偽距單點定位精度略優于G2頻率,雙頻組合偽距單點定位由于觀測噪聲放大的原因,定位精度低于單頻定位精度;(3)GLONASS系統在歐洲地區的定位精度優于中國地區與澳大利亞地區,中國地區與澳大利亞地區GLONASS偽距單點定位精度相當,為今后GLONASS系統的定位研究提供一定的參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34