
艦船慣導(dǎo)水平姿態(tài)誤差動態(tài)自主評估與補償方法
2021-05-17 07:18:34郭正東高大遠
艦船科學技術(shù) 2021年4期
王 超,郭正東,蔡 鵬,高大遠,姜 暖
(海軍潛艇學院,山東 青島 266000)
0 引 言
艦船慣導(dǎo)水平姿態(tài)精度直接影響了艦船導(dǎo)彈武器系統(tǒng)的使用。當受到強干擾、損傷以及特殊氣候環(huán)境的影響時,將難以實時獲得準確外界參考導(dǎo)航校準信息對慣導(dǎo)系統(tǒng)進行校正或精度評估,極大影響艦船戰(zhàn)斗力的發(fā)揮。針對艦船慣導(dǎo)水平姿態(tài)誤差實時動態(tài)自主評估愈發(fā)重要,同時也是需要解決的關(guān)鍵性難點問題之一。
在海上動態(tài)條件下,受到海況、艦船運動等因素的影響,艦船姿態(tài)不斷變化,艦船高精度水平姿態(tài)信息主要由高精度旋轉(zhuǎn)慣導(dǎo)系統(tǒng)提供,對長時間無校正連續(xù)工作的慣導(dǎo)系統(tǒng),受到各種誤差因素的影響,其水平姿態(tài)精度不斷降低,由于慣導(dǎo)系統(tǒng)自身水平姿態(tài)精度相對較高,難以在動態(tài)情況下找到合適的儀器對慣導(dǎo)系統(tǒng)水平姿態(tài)精度進行評估[1]。
目前,針對艦船慣導(dǎo)系統(tǒng)水平姿態(tài)誤差主要在實驗室或塢內(nèi)等靜態(tài)條件下進行評估[1-3],或通過衛(wèi)星
組合導(dǎo)航比對、天文導(dǎo)航、差分GPS姿態(tài)測量比對等方式進行動態(tài)評估[1,4-6],而對于長時間海上航行的艦船而言,當無法適時獲取星體測量、衛(wèi)星導(dǎo)航及其他導(dǎo)航校準信息時,上述提出的方法均無法采用。在無外界參考信息條件下,如何解決艦船慣導(dǎo)水平姿態(tài)誤差動態(tài)自主評估方面,目前沒有查到相關(guān)研究資料。本文針對艦船旋轉(zhuǎn)慣導(dǎo)水平姿態(tài)誤差動態(tài)評估問題,提出利用慣導(dǎo)自身信息實現(xiàn)水平姿態(tài)誤差評估的新方法。利用艦船穩(wěn)速直航狀態(tài)下的實際加速度值近似為零的特點,分別分析慣導(dǎo)等效加速度信息和慣導(dǎo)速度誤差與水平姿態(tài)角誤差之間的關(guān)系,建立慣導(dǎo)水平姿態(tài)誤差自主評估模型,在不依賴外部導(dǎo)航信息條件下,實現(xiàn)慣導(dǎo)水平姿態(tài)誤差進行動態(tài)自主評估與補償,有效提高慣導(dǎo)系統(tǒng)的水平姿態(tài)精度,具有重要的實際應(yīng)用價值。
1 慣導(dǎo)水平姿態(tài)誤差自主評估模型
以當?shù)氐乩碜鴺讼禐閷?dǎo)航坐標系,慣導(dǎo)解算的艦船相對地球的運動加速度在導(dǎo)航坐標系中的投影為[7]:



載體實際比力表達式如下式:

上式寫成分列式為:
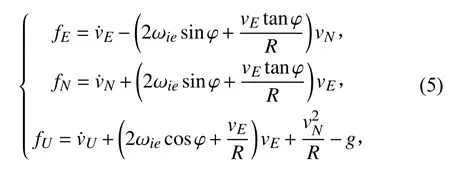
將式(5)代入式(3),不考慮垂向速度及其誤差以及垂向高度誤差,寫成分量形式,如下式:


對于海上航行的艦船而言,其運動速度相對較低,慣導(dǎo)速度誤差、緯度誤差、方位角誤差以及加速度計東向和北向零位誤差相對較小,引起的東向和北向加速度誤差分量為相對小量,為簡化分析,式(6)可簡化為:
根據(jù)式(7),等效東向和北向加速度誤差主要由慣導(dǎo)北向水平誤差角和東向水平誤差角引起。

當艦船處于穩(wěn)速直航狀態(tài)時,慣導(dǎo)等效東向和北向加速度約等于慣導(dǎo)等效東向和北向加速度誤差。因此,當艦船處于靜止或勻速航行狀態(tài)時,,由慣導(dǎo)加速度計測量信息得到的艦船等效加速度誤差主要與慣導(dǎo)水平姿態(tài)角誤差有關(guān)。當慣導(dǎo)系統(tǒng)的東向和北向水平姿態(tài)角誤差的最大值分別為時,產(chǎn)生的慣導(dǎo)等效東向和北向最大加速度誤差約為0.002 9 m/s2。
利用等效東向和北向加速度誤差可對慣導(dǎo)水平姿態(tài)角誤差進行估計,如下式:

在艦船海上航行條件下,若實現(xiàn)對慣導(dǎo)水平姿態(tài)角誤差進行動態(tài)估計,需要獲取慣導(dǎo)等效東向和北向加速度誤差。
綜合以上分析過程可知,當艦船處于穩(wěn)速直航狀態(tài)時,艦船實際等效東向和北向加速度信息約為0。由于加速度計零偏、標度因素誤差、安裝誤差、姿態(tài)角誤差和重力誤差等引起的誤差分量以及由于補償由地球自轉(zhuǎn)和艦船在地球表面運動引起的加速度不完全等因素的影響,慣導(dǎo)輸出等效東向和北向加速度信息不為0,且等效東向加速度將與慣導(dǎo)北向水平角實際誤差振蕩保持一致,等效北向加速度將與慣導(dǎo)東向水平角實際誤差振蕩保持一致。此時,慣導(dǎo)等效東向和北向加速度誤差主要由于慣導(dǎo)水平姿態(tài)角誤差引起的,根據(jù)這一特點,提出了利用慣導(dǎo)自身加速度信息實現(xiàn)慣導(dǎo)水平姿態(tài)誤差估計的新方法,可實現(xiàn)海上動態(tài)條件下艦船慣導(dǎo)水平姿態(tài)誤差的實時動態(tài)自主估計,而不需要天文導(dǎo)航、衛(wèi)星導(dǎo)航等外界定位手段。
2 慣導(dǎo)水平姿態(tài)誤差與速度誤差之間關(guān)系分析
由于慣導(dǎo)等效加速度誤差直接決定慣導(dǎo)輸出的速度精度,在艦船穩(wěn)速直航狀態(tài)下,受到各種誤差因素的影響,慣導(dǎo)輸出的速度信息中存在較大的周期性振蕩誤差特點,因此在式(9)的基礎(chǔ)上,可進一步分析慣導(dǎo)水平姿態(tài)誤差與速度誤差之間的關(guān)系,為實現(xiàn)利用慣導(dǎo)速度誤差對水平姿態(tài)誤差進行評估奠定基礎(chǔ)。
受到各種誤差因素的影響,艦船慣導(dǎo)速度誤差主要呈現(xiàn)受傅科周期振蕩調(diào)制的舒拉周期振蕩特點,且誤差均值近似為零。為簡化分析,以艦船慣導(dǎo)東向速度誤差為例,不考慮傅科周期振蕩調(diào)制影響,則艦船慣導(dǎo)東向速度誤差表達式可表示為:

式中:k為振蕩誤差系數(shù); ωs為舒拉周期振蕩角頻率;φs0舒拉周期振蕩初始相位。
對式(10)兩邊求微分得:

根據(jù)式(9)和式(11)得

根據(jù)式(10)和式(12),在任意一段舒拉周期時間內(nèi),存在如下關(guān)系式:

式中, |φN-max|為某一舒拉周期時間段內(nèi)北向水平姿態(tài)角誤差最大值, |δvE-max|為某一舒拉周期時間段內(nèi)東向速度誤差最大值。根據(jù)式(13),當姿態(tài)角誤差單位為角分,速度誤差單位為節(jié)時,通過計算可知,在某一舒拉周期時間段內(nèi)東向速度誤差最大值約為北向水平姿態(tài)角誤差最大值的4.6倍。值得注意的是,上述分析中沒有考慮傅科周期振蕩調(diào)制的影響,而實際上,東向速度誤差和北向水平姿態(tài)角誤差受到傅科周期振蕩調(diào)制,因此,在實際誤差分析中,應(yīng)考慮在傅科周期時間段內(nèi),東向速度誤差最大值約為北向水平姿態(tài)角誤差最大值的4.6倍,即在傅科周期時間段內(nèi),當艦船慣導(dǎo)北向水平姿態(tài)誤差最大值為1'時,則慣導(dǎo)東向速度誤差最大值約為4.6 kn。同理,也可分析得到東向水平姿態(tài)角誤差與慣導(dǎo)北向速度誤差存在同樣的關(guān)系。因此,根據(jù)在傅科周期時間段內(nèi)慣導(dǎo)速度誤差的變化特點,也可直接對慣導(dǎo)水平姿態(tài)誤差進行評估。
3 仿真實驗分析
在海上動態(tài)條件下,由于很難找到比慣導(dǎo)姿態(tài)精度更高的參考基準,難以對慣導(dǎo)水平姿態(tài)誤差進行估計,本文采用計算仿真實驗方法,驗證提出慣導(dǎo)水平姿態(tài)自主評估方法的可行性。如通過仿真,可獲得慣導(dǎo)實際輸出的等效東向和北向加速度、水平姿態(tài)角誤差、速度誤差等信息,分析等效水平加速度信息、水平速度誤差與水平姿態(tài)角誤差之間的關(guān)系等。
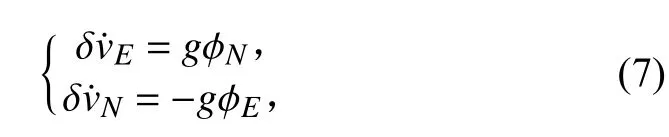
結(jié)合某型激光陀螺慣導(dǎo)系統(tǒng)公開文獻中給出的激光陀螺和加速度計的主要技術(shù)參數(shù)以及安裝誤差、標度因數(shù)誤差、初始誤差、旋轉(zhuǎn)方案等參數(shù),設(shè)置仿真條件如下[9-10]:3個激光陀螺的常值漂移為[0.001°/h,0.001°/h,0.001°/h],隨機漂移標準差均為 0.001°/h;3個加速度計的零偏均為 0.01mg,隨機白噪聲標準差為0.005 mg;陀螺和加速度計的對稱性標度因數(shù)誤差均 為1 ppm; 安 裝 誤 差 陣 為[0,4′′,-4′′;-4′′,0,4′′;4′′,-4′′,0];初始姿態(tài)誤差為 [0.5′,0.5′,2.0′];初始速度為14 kn;初始姿態(tài)角均為0,初始經(jīng)度、緯度分別為122°E和 3 6°N;慣導(dǎo)旋轉(zhuǎn)方案為單軸旋轉(zhuǎn);艦船保持穩(wěn)定航行狀態(tài),仿真時間為48 h。在艦船穩(wěn)定航行狀態(tài),單軸旋轉(zhuǎn)慣導(dǎo)輸出等效北向加速度信息如圖1所示,輸出北向速度誤差如圖2所示。

圖1 慣導(dǎo)等效北向加速度Fig.1 Equivalent northward acceleration of INS

圖2 慣導(dǎo)北向速度誤差Fig.2 Northward velocity error of INS
根據(jù)圖1和圖2,當艦船處于穩(wěn)定直航狀態(tài)時,由于慣導(dǎo)加速度計零偏、標度因素誤差、安裝誤差、初始姿態(tài)誤差以及由于補償由地球自轉(zhuǎn)和艦船在地球表面運動引起的加速度不完全影響等因素的影響,慣導(dǎo)輸出的等效北向加速度信息和北向速度誤差并不為0,而是均呈現(xiàn)受傅科振蕩調(diào)制的舒拉周期振蕩誤差特點,北向加速度振蕩范圍約為(-0.001 9 m/s2,0.001 9 m/s2),北向速度誤差的振蕩范圍約為(-3.0 kn,3.2 kn)。
當艦船處于穩(wěn)定直航狀態(tài)時,認為航向航速不變,根據(jù)式(9)可知,慣導(dǎo)等效加速度信息與慣導(dǎo)速度誤差呈現(xiàn)一一對應(yīng)關(guān)系,因此,利用艦船穩(wěn)定航行階段時的加速度信息可實現(xiàn)對慣導(dǎo)水平姿態(tài)角誤差進行估計,并實現(xiàn)誤差補償。
根據(jù)艦船穩(wěn)定航行階段的慣導(dǎo)等效加速度信息,利用式(9)可實時估計慣導(dǎo)水平姿態(tài)角誤差,如圖3所示。
在圖3中,實線為慣導(dǎo)實際東向水平姿態(tài)角誤差曲線,是由計算機仿真獲取;點虛線為根據(jù)慣導(dǎo)等效加速度信息,利用式(9)估計出的慣導(dǎo)東向水平姿態(tài)
角誤差曲線。根據(jù)圖3,東向水平姿態(tài)角估計誤差曲線與實際誤差曲線基本重合,均呈現(xiàn)受傅科振蕩調(diào)制的舒拉周期振蕩誤差特點利用估計出的慣導(dǎo)水平姿態(tài)角誤差對慣導(dǎo)實際輸出姿態(tài)角進行補償,得到補償后慣導(dǎo)水平姿態(tài)角誤差曲線如圖4所示。
圖3 東向水平姿態(tài)角誤差Fig.3 Eastward horizontal attitude angle error

圖4 補償后慣導(dǎo)東向水平姿態(tài)角誤差Fig.4 Compensated eastward horizontal attitude angle error
根據(jù)圖3和圖4,慣導(dǎo)輸出東向水平角實際誤差振蕩范圍約為(-0.66',0.66'),經(jīng)過補償后,東向水平角誤差振蕩范圍為(-0.16',0.16'),與補償前慣導(dǎo)實際水平角誤差相比,北向水平角誤差最大值和振蕩范圍均減小了75.8%。
此外,根據(jù)圖2和圖3,在慣導(dǎo)傅科周期時間段內(nèi),北向速度誤差最大值約為3.3kn,根據(jù)慣導(dǎo)東向速度誤差最大值約為北向水平姿態(tài)角誤差最大值的4.6倍這個特點,可估計出慣導(dǎo)東向水平姿態(tài)角誤差最大值約為0.69',從而可驗證在慣導(dǎo)傅科周期時間段內(nèi),慣導(dǎo)東向速度誤差最大值約為北向水平姿態(tài)角誤差最大值的4.6倍。利用此特點,根據(jù)慣導(dǎo)傅科周期時間段內(nèi)的速度誤差特點,實現(xiàn)對慣導(dǎo)水平姿態(tài)角誤差范圍的估計。
4 結(jié) 語
在無外界校準導(dǎo)航信息條件下,利用艦船穩(wěn)速直航狀態(tài)下的實際加速度值近似為零的特點,分別建立了基于慣導(dǎo)等效水平加速度信息和慣導(dǎo)速度誤差的水平姿態(tài)角誤差評估模型,一方面可根據(jù)艦船穩(wěn)速直航狀態(tài)下慣導(dǎo)等效加速度實現(xiàn)對慣導(dǎo)水平姿態(tài)誤差進行動態(tài)自主估計和補償,另一方面也可根據(jù)在傅科周期時間段內(nèi)的速度誤差估計慣導(dǎo)水平姿態(tài)角誤差的范圍。仿真實驗結(jié)果表明,提出的水平姿態(tài)誤差動態(tài)自主評估與補償方法,在不依賴外部導(dǎo)航信息條件下,實現(xiàn)了慣導(dǎo)水平姿態(tài)誤差動態(tài)自主評估與補償,能較大幅度提高慣導(dǎo)系統(tǒng)的水平姿態(tài)精度,對無外部導(dǎo)航校準信息情況下的艦船作戰(zhàn)評估具有重要的實際應(yīng)用價值。
下一步將在仿真實驗的基礎(chǔ)上,充分考慮海上復(fù)雜影響因素情況,結(jié)合艦船碼頭或?qū)嶋H海上動態(tài)航行中慣導(dǎo)實測數(shù)據(jù),利用建立的慣導(dǎo)水平姿態(tài)誤差評估模型,對海上動態(tài)條件下的慣導(dǎo)水平姿態(tài)誤差進行估計。
猜你喜歡
美與時代·美術(shù)學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(shè)(2019年12期)2019-05-21 02:55:32
中華手工(2017年2期)2017-06-06 23:00:31
學苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
中外會展(2014年4期)2014-11-27 07:46:46
中國火炬(2010年8期)2010-07-25 11:34:30
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
