蝦蛄眼視覺系統特點及研究進展
2021-05-17 02:37:02許明珠孫曉婕高秀敏
光學儀器 2021年2期
許明珠,孫曉婕,曹 焱,張 鈺,高秀敏
(1.上海理工大學 光電信息與計算機工程學院,上海 200093;2.杭州電子科技大學 電子信息學院,浙江 杭州 310018)
引 言
視覺系統是動物群體中的最主要的感覺系統之一。依據環境和行為需求,逐漸演化為利于生存的視覺優勢,包括感知光強度和分布、顏色分辨以及檢測偏振的變化等。其中,能夠識別偏振極化的視覺系統要求眼睛內部的受體細胞或其中的視覺色素具有正交的取向結構。早期,在許多節肢動物中都看到了偏振敏感性[1-2],盡管許多動物的視覺系統具有偏振敏感性,但要擁有真正的偏振視覺,需要具備檢測兩個或多個電矢量方向的能力。迄今為止,在水下環境中,這種能力僅在腳足類和氣孔類中顯現出來[3-5]。尤其是腳足綱甲殼類(蝦蛄),在視覺方面的表現最為出色,擁有提供立體視覺的“三目眼”[6]、16種光譜敏感度的彩色分辨系統以及線性偏振、圓偏振的識別系統。此外,腳足類動物能夠旋轉眼睛,從而實現對外界任意偏振角度的感知,以此協助它們能夠快速捕食獵物[7]或迅速有效地躲避攻擊[8]。
由于其優越的視覺特性,使得蝦蛄眼的視覺研究在仿生學中脫穎而出。本文將對蝦蛄眼的結構及功能進行梳理,總結蝦蛄眼的仿生研究及應用前景,為后續仿生研究提供相關理論基礎。
1 蝦蛄的視覺系統
1.1 蝦蛄眼的整體結構與功能
1988年,對蝦蛄復眼的相關研究中提到,蝦蛄可以用單眼至少觀察到兩次物體,提供了單眼具有立體視覺的可能性[9]。實際上,每只眼睛是由中間的中頻帶區域,將整個眼睛分為背側和腹側半球,整體上呈現三個不連續的并列區域,如圖1(a)所示。通過以上三個獨立區域,可以對視覺空間中的一點同時進行觀察[10]。由此證明,蝦蛄的每只眼睛實際上都是“三目”的。

圖1 蝦蛄眼結構的組成Fig.1 The composition of the eye structure of mantis shrimp
蝦蛄的每個小眼由角膜、視錐細胞、色素細胞和視網膜細胞組成,如圖1(b)所示。角膜位于蝦蛄眼的最外層,具有一定屈光能力,起保護作用;晶錐位于角膜下方,由視錐細胞構成,將光源進行匯聚;色素細胞用于顏色識別;視網膜細胞的微絨毛構成陣列結構,可以將光信號轉化為電信號傳遞至視網膜。
1988年,昆士蘭大學Marshall[11]通過連續切片重建,首次揭示了蝦蛄眼有16種不同的光感受器類型,其中14種是在中頻帶中發現的。另外,使用顯微分光光度法和電生理學的直接吸光度測量法證實,除了表現形式不同之外,這16種感受器在功能上也有所不同[12],它們不僅能夠利用光譜信息,而且還能利用極化作用[13-18]。
1.2 線性極化識別
蝦蛄眼的背側和腹側兩個半球區域和普通的甲殼類動物的眼睛[16-18]結構相同,包括位于遠端的R8細胞和組成環形的R1~R7細胞。以腹
側半球為例,該結構中R1、R4、R5與R2、R3、R6、R7方向的微絨毛相互正交;R8細胞對應的微絨毛同樣相互正交,用數字1~8表示R1~R8細胞,如圖2所示。R1~R7細胞、R8細胞對應的微絨毛均對線性極化敏感[19],背側和腹側半球之間存在45°差,因此能夠確定4個不同的電矢量方向(見圖1(a))。

圖2 腹部 R8、R1~R7 細胞截面圖Fig.2 Sectional view of R8 and R1~R7 cells in abdomen
1.3 圓極化識別
2008年,Chiou等[20]首次描述了一種在腳足類甲殼動物中能夠檢測、分析圓偏振光的視覺系統,并證明其具有區分圓偏振光的能力,該視覺系統位于中頻帶的第5行和第6行。其中,R8細胞對應的微絨毛沿同一個方向而且橫截面呈現橢圓形,R8細胞充當1/4波片作用,能夠將圓偏振轉化為線偏振;R1~R7細胞對應的微絨毛橫截面呈菱形,如圖3所示。其中R1、R4、R5細胞和R2、R3、R6、R7細胞的微絨毛方向分別與R8細胞微絨毛方向分別呈+45°與-45°,即細胞R1、R4、R5的微絨毛和R2、R3、R6、R7細胞的微絨毛方向相互正交。由于兩行之間微絨毛的方向發生90°的偏轉,因此第6行對與中頻帶平行的電矢量敏感,而第5行對與垂直于中頻帶的電矢量敏感,從而實現對左、右圓偏振光的區分。

圖3 中頻帶第 5、6 行 R8、R1~R7 細胞剖面圖及微絨毛方向Fig.3 Sections of R8 and R1~R7 cells of the midband and the direction of microvilli in the 5th and 6th rows
Kleinlogel等[21]通過細胞記錄的方式,發現中頻帶第5、6行能夠用于檢測圓極化,進一步證明利用解剖學和神經元特征,并使用極化層析成像確定細胞層的極化狀態,測量每個狀態的響應,可以測量斯托克斯的所有參數,以獲得最佳的偏振視覺。
1.4 光譜分辨
彩色視覺系統位于中頻帶的第1~4行區域內,包含12種不同的光感受器類型,具有光譜離散的顏色通道[22-26]。
蝦蛄眼的彩色視覺系統具有以下幾個特點。
(1)每行都有一個遠端放置的R8細胞。
1999年[24],在電生理學方面顯示:蝦蛄眼中的R8細胞對紫外光具有敏感性,在310,320,330,340,380 nm處靈敏度達到峰值,如圖4所示。這種光譜多樣性表明R8細胞中存在多種視覺色素,這些色素在紫外線范圍內具有不同的最大吸光度[25]。
(2)R1~R7細胞分為兩個不同的層(R1、R4、R5層和R2、R3、R6、R7層),對應的微絨毛方向正交堆疊,可用于檢測400~720 nm范圍內的可見光光譜。

圖4 不同區域 R8 細胞的光譜靈敏度Fig.4 Spectral sensitivity of R8 cells in different regions
(3)中頻帶的第1、3和4行小眼具有相同的結構,R1、R4和R5細胞構成遠端層,而R2、R3、R6、R7構成近端層,第2行小眼中與之相反[26-30],如圖5所示。與背側、腹側以及第5、6行相比,雖然中頻帶第1~4行中的微絨毛組織性較差,并且較厚,但依然保持微絨毛的正交性,因此,利于產生干凈的彩色信號[28]。

圖5 彩色視覺系統結構圖Fig.5 Structure diagram of color vision system
(4)中頻帶的第2、3行,具有帶有顏色的橫紋肌濾波結構,可用于實現視覺光譜的可諧調。
2001年,Cronin等[29]將具有相同視覺色素的蝦蛄分別置于淺水和深水環境,雖然都能實現對在整個可見光范圍的感知,但淺水環境下,在大于600 nm的波長處光譜靈敏度達到峰值。而生活在深水環境下,峰值向短波長方向偏移,如圖6所示。由此證明,蝦蛄自身的視覺系統,可根據環境進行濾波,實現視覺的動態可調。

圖6 不同環境下的光譜靈敏度Fig.6 Spectral sensitivity in different environments
Osorio等[30]研究表明具有窄帶光譜靈敏度的光感受器與具有寬帶光譜靈敏度的光感受器相比,在檢測顏色信號方面可靠性更強。盡管蝦蛄的眼睛并沒有專門增強同種顏色信號,但中頻帶的第2、3行通過過濾特定的光譜可能會增加某些行為相關的顏色信號的可分辨性。2000年,Chiao等[31]測量了蝦蛄身體各個部位的反射光譜并使用多個雙色通道的模型進行顏色編碼,色度估計,結果證實了蝦蛄的濾波結構可以增強其彩色信號的對比度,從而最大程度地提高動物交流中信號檢測的可靠性。
(5)能夠識別顏色,波長分辨率較弱。
2014年,Thoen等[32]通過食物獎勵訓練動物熟悉10種不同顏色的波長,波長范圍400~650 nm,再利用帶有波長的光纖刺激蝦蛄眼,以此來測試蝦蛄的顏色辨別能力。當以50~100 nm為步長給予刺激時,成功率達70%~80%;當波長間隔減小到12~25 nm時,成功率下降到50%左右。結果表明,它們能夠識別顏色但波長分辨率較弱,這有助于減少大腦處理時間,以便在更短的時間對環境或獵物做出預判。
1.5 眼球運動
蝦蛄眼各項功能的實現,除自身結構優勢外,還需要眼球的運動加以輔助。蝦蛄具有豐富的眼球運動能力,通過大范圍的俯仰、偏轉和旋轉,它們的眼睛可以進行協調或獨立的視物能力[33],通過掃視獲取感興趣的對象。在這些眼球運動中,特別值得注意的是高達90°的旋轉[34-36]如圖7所示。

圖7 蝦蛄的眼球運動Fig.7 Eye movements of mantis shrimp
蝦蛄的眼球轉動主要對偏振識別有影響,而且與背側和腹側兩個半球區域有關[36]。為了了解眼球扭轉如何影響偏振視覺,需要了解眼位的變化如何改變光感受器中微絨毛的方向。以圖8(a)為例,背側和腹側半球微絨毛方向偏移了±45°。觀察物體時,兩個半球存在重疊區域。如果一個半球的取向使得偏振對比度最大化,眼球就會發生偏轉,使另一半球最大程度地錯位,避免信息的兩個視覺維度之間混淆,如圖8(b)所示。
除此之外,蝦蛄結合神經網絡中的自適應機制可以應對明暗交替的環境。解剖學中有相關研究發現,這與肌原纖維收縮、擴展有關。在昏暗的環境中,肌原纖維收縮且視錐變短,從而使光圈和視野變寬,更多的光被吸收并傳輸到視網膜細胞,在明亮的環境中則相反。
2 基于蝦蛄眼的仿生研究
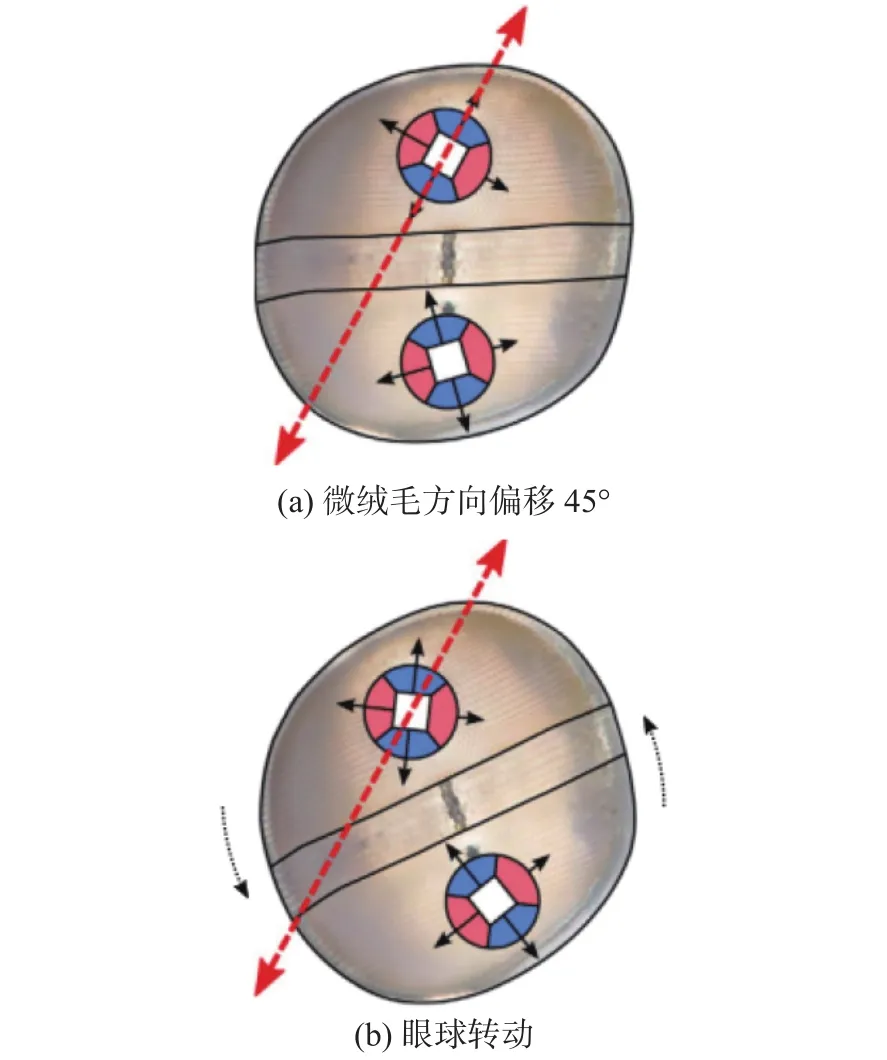
圖8 蝦蛄的微絨毛方向與眼球轉動關系Fig.8 The relationship between the direction of microvilli of mantis shrimp and eyeball rotation
從生物學的角度來看,蝦蛄擁有迄今為止發現的最復雜的動物視覺系統。在很長一段時間內,研究者們致力于利用解剖學和電生理學的方法,剖析蝦蛄眼的結構,對各部分的功能進行探索。隨著不斷的探索發現,基于蝦蛄眼的仿生研究逐漸成為研究的熱點。
受蝦蛄眼線偏振識別作用的啟發,Gruev等[37]和Kulkarni等[38]先后設計了帶有鋁納米線濾光片的偏振成像傳感器,如圖9所示。前者可以捕獲可見光譜中的強度、角度和線性偏振度;后者使得傳感器獲取偏振信息的同時實現在可見光范圍內的光譜選擇性。
2014年,York等[39]通過將CMOS成像技術與納米制造技術相結合,設計了一種實現線性偏振的成像傳感器,如圖10所示。在這種受生物啟發的視覺系統中,光敏元件與鋁納米線整體集成,用作線性偏振濾光片。來自二極管的信號被線性轉換為像素內部的電流,然后由每個獨立像素形成圖像。
2017年,Garcia等[40]通過將納米線偏振濾光片與垂直堆疊的光電探測器單片集成為高分辨率偏振成像儀,如圖11所示,可以實時記錄顏色和偏振信息。在整個可見光譜范圍內,量子效率均高于30%,同時在每個光譜通道上實現約40的高偏振消光比。這些研究利用了顏色和偏振信息,使海洋物種的水下成像研究成為可能。

圖9 帶有鋁納米線濾光片的偏振成像傳感器Fig.9 Polarization imaging sensor with aluminum nanowire filter

圖10 用于線性偏振識別的成像傳感器Fig.10 Imaging sensor for linear polarization recognition

圖11 高分辨率偏振成像儀Fig.11 High resolution polarization imager
2018年,Powell等[41]通過集成各種偏振光學元件來模仿螳螂蝦的偏振敏感視覺系統,如圖12 所示。將以 0°、45°、90°和 135°排列的鋁納米線極化濾光片沉積到圖像傳感器的像素上。這使攝像機能夠捕獲強度,部分偏振和偏振角圖像,以此測量水下偏振角,這項研究為遠程水下航行打開了新的可能性。

圖12 測量水下偏振的視覺仿生系統Fig.12 Visual bionic system for measuring underwater polarization
2019年,Basiri等[42]設計了垂直整合的雙層超表面,模仿蝦蛄眼結構,以區分左右圓偏振。類眼狀的雙層超表面設計由充當QWP的納米結構雙折射超表面、線性偏振納米光柵和介電間隔層組成,如圖13所示。通過實驗證明所設計的亞微米級圓偏振濾光片,其峰值消光比高達35,在近紅外波長下的最大透射效率接近80%。此外,將圓偏振濾光片與線性偏振濾光片整體集成在一起,如圖14所示,可以實現對具有任意偏振態的光進行全斯托克斯偏振測量。
國內基于蝦蛄眼的仿生研究相對較少,但也取得了不錯的研究成果。2011年,臺北國立科技大學Jen等[43]受到蝦蛄眼中充當極化轉化器的R8細胞的微絨毛結構的啟發,設計并制造了包含兩種不同類型納米棒陣列的周期性多層結構,如圖15所示。形態上類似于眼細胞,所涉及的周期性多層結構,解決了典型波片由于介電材料折射率差異導致相位延遲的問題,實現了在可見光范圍內的消色差作用。
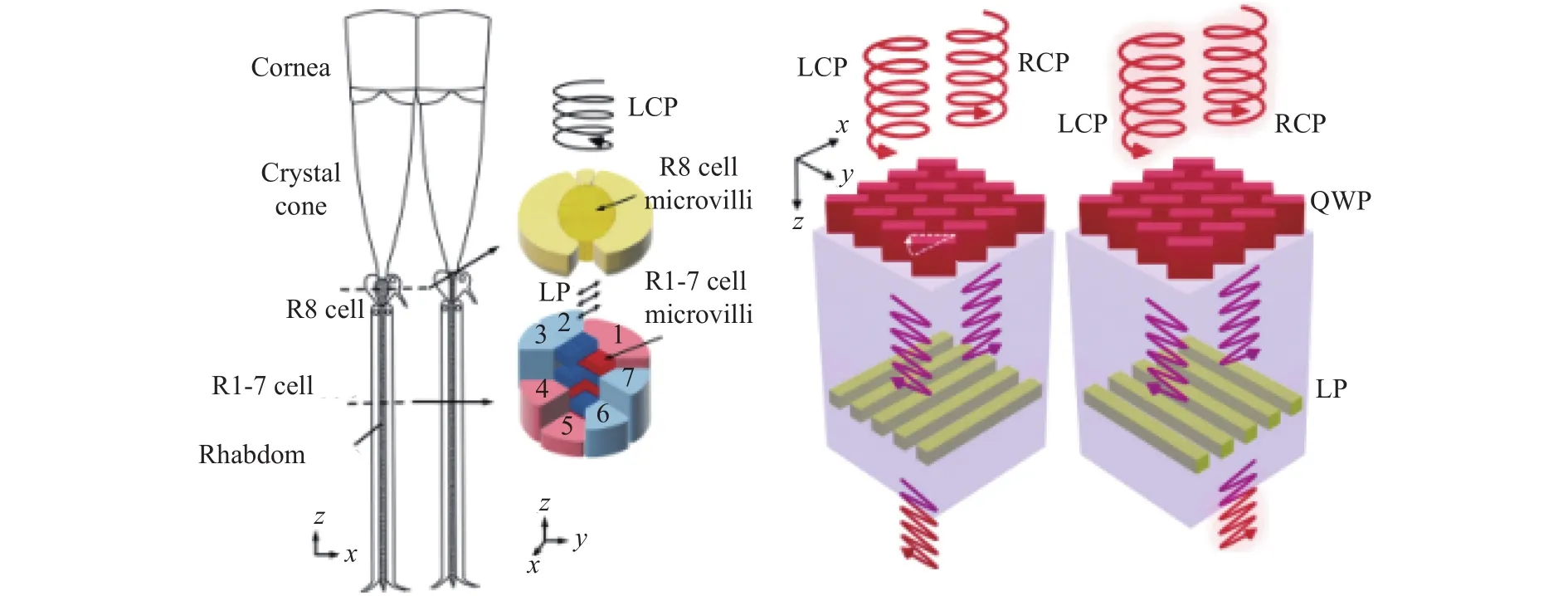
圖13 雙層超表面結構圖Fig.13 Double-layer metasurface structure

圖14 任意偏振態測量的焦平面結構Fig.14 Focal plane structure for arbitrary polarization measurement
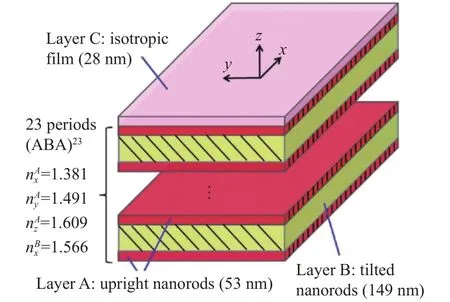
圖15 周期性多層結構的納米棒陣列Fig.15 Nanorod array with a periodic multilayer structure
2013年,南京曉莊學院張家華等[44]根據蝦蛄根據環境光照改變調節視域范圍的原理,提出一種圖像信息采集系統,極大地提高了采樣圖像的成像效果。2014年,河海大學沈潔等[45]模擬蝦蛄的復眼結構,采集六個偏振信號光強:I30°、I75°、I120°、I165°(線偏振)以及左右圓偏振IL、IR,建立拮抗偏振模型,最終通過計算得到偏振度參數,即獲取拮抗參數成功改善目標與背景之間的對比度,提高水下目標檢測的精度。2016年,趙永強等[46]設計一種仿蝦蛄眼的大視場多譜段偏振視覺系統,如圖16所示,該系統為3×3陣列結構,陣列四角和中心的五個相機用于光譜識別,其他四個相機分別設置為0°、45°、90°、135°方向上的偏振探測,最終將九個相機獲得的圖像輸入計算機,經圖像處理獲得大視場的偏振圖像以及光譜圖像。

圖16 多譜段偏振視覺系統Fig.16 Multi-spectral polarization vision system
2017年,長春理工大學劉志穎設計仿蝦蛄眼譜段的可選偏振態以及多通道實時多譜段偏振成像探測裝置[47-48],以此提高目標探測的精度。2019年,長春理工大學設計了一種硅與鋁納米線柵結集成的雙層線偏振探測結構[49],如圖17所示。實驗表明,該結構能夠平衡吸收率與消光比之間的矛盾。此外,受蝦蛄眼正交微絨毛陣列的啟發,仿生設計垂直堆疊的雙層線柵結構(見圖18),實現對兩個正交方向偏振光的吸收,有利于提高空間分辨率。

圖17 雙層線偏振探測結構Fig.17 Double-layer linear polarization detection structure

圖18 垂直堆疊的雙層線柵結構Fig.18 The structure of Vertically stacked double-layer wire grid
3 應用前景
3.1 水下目標探測
螳螂蝦的視覺系統不僅具有復雜的器官特征,而且具有主動的適應機制。2014年,Chen等[50]提出了一種基于視覺適應機制的水下物體提取方法。借助螳螂蝦復眼的視覺適應機制,利用機器學習方法解決了加權信息融合的問題,實驗結果證明了該方法在水下物體提取中的精度高于傳統方法。
3.2 醫學檢測
醫學研究發現,癌變組織與健康組織能夠反射不同的偏振光,而蝦蛄眼能對人眼無法觀測的偏振光進行識別,將這一原理用于視覺影像可進行癌變組織的檢測。2014年,Patel等[51]在醫學雜志上發表,使用組合染料增強的廣域熒光偏振成像來對癌癥細胞邊緣進行檢驗。熒光偏振描繪了乳腺癌細胞的外側邊緣,其對比度優于光學相干斷層掃描提供的對比度,證明了偏振效應能夠有效診斷癌細胞,在疾病診斷方面都有獨特的優勢。
除此之外,蝦蛄的動態極化視覺系統,可以增強物體與其背景之間的視覺對比度。這對于極化照相機和圖像處理領域開發十分有利,也可以用于自主智能導航或用于自主安全系統的傳感器[52]中。
4 結 論
綜上所述,蝦蛄的視覺系統能夠能夠對線性和圓偏振進行識別,結合眼球運動,可以達到最佳的偏振視覺效果。蝦蛄眼可以實現單目測距、多通道光譜偏振成像以及蝦蛄眼中微結構可以實現消色差1/4波片的功能。因此蝦蛄眼的仿生研究具有廣闊的應用前景,對導航、目標探測、衛星遙感、醫療診斷等眾多領域的發展具有重要的推動作用。
目前,以蝦蛄眼解剖學作為基礎,對蝦蛄眼的功能已經有了一定的認識,但蝦蛄眼視覺系統復雜,影響因素眾多,仍然存在許多問題有待研究,例如:顏色識別和偏振系統之間如何平衡?視覺神經纖維內外的信息如何處理?以及如何將兩只眼睛的信息有效的結合起來?蝦蛄眼視覺系統的仿生技術仍處于初步發展階段,將蝦蛄眼的視覺優勢深入開發,仍存在較大的挑戰與研究價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
