基于Aloha的單顆星載ADS-B接收機監視性能分析
2021-05-17 03:51:02王松林
河南科技 2021年3期
王松林
摘 要:星載ADS-B是下一代民航廣域航空監視的重要手段。為定量分析星載ADS-B系統的監視性能,本文首先將一定數量飛機隨機分布在衛星覆蓋區域,并基于Aloha原理建立星載ADS-B系統的一般模型,然后針對飛機發送的ADS-B信息重疊導致ADS-B信息不能正確接收的情況,從理論角度分析星載ADS-B系統的ADS-B信息沖突、系統容量和ADS-B位置信息更新間隔,最后進行仿真,驗證理論分析中性能指標的正確性,并進一步評估星載ADS-B系統對飛機位置的監視性能。
關鍵詞:星載ADS-B;泊松分布;ADS-B信息沖突;ADS-B位置信息更新間隔
中圖分類號:TN95文獻標識碼:A文章編號:1003-5168(2021)03-0006-05
Monitoring Performance Analysis of Single Satellite-borne
ADS-B Receiver Based on Aloha
WANG Songlin
(Henan Branch of CAAC Central and Southern Regional Air Traffic Administration,Zhengzhou Henan 453000)
Abstract: Satellite-borne ADS-B is an important means for the next generation of civil aviation wide-area aviation surveillance. In order to quantitatively analyze the surveillance performance of the satellite-borne ADS-B system, this paper first randomly distributed a certain number of aircraft in the satellite coverage area, and established a general model of the satellite-borne ADS-B system based on the Aloha principle, then analyzed the ADS-B information conflict, system capacity and ADS-B position information update interval of the satellite-borne ADS-B system from a theoretical perspective, aiming at the situation that ADS-B information could not be received correctly due to the overlapping of the ADS-B information sent by the aircraft, finally performed a simulation to verify the correctness of the performance indicators in the theoretical analysis, and to further evaluate the monitoring performance of the satellite-borne ADS-B system on the aircraft position.
Keywords: satellite-borne ADS-B;poisson distribution;ADS-B information conflict;ADS-B location information update interval
星載ADS-B系統是基于衛星鏈路增強的廣播式自動監視系統。相對于傳統的ADS-B系統,星載ADS-B系統在拓展監視范圍、優化飛行路線、增強空域安全等方面具有明顯的應用優勢。該系統將廣泛應用于民航空管領域,以增強空域監視能力。因此,星載ADS-B是民航廣域航空監視的重要技術手段。“馬航失聯”事件引發全球民航界對監視系統受地理條件限制的重視,由于監視范圍廣,因此星載ADS-B接收機負載大,導致ADS-B信息沖突增多,ADS-B信息沖突是造成監視盲區的主要因素,故開展星載ADS-B系統監視性能的研究具有重要意義。
針對雷達系統受地形條件限制的問題,為了提高空域飛行安全性,德國宇航中心率先提出低軌道星載ADS-B的概念[1]。為驗證星載ADS-B系統性能的可行性,德國宇航中心發射了在軌PROBA-V微納衛星[2-5],開展了星載ADS-B系統試驗研究,基于實測數據的仿真驗證了星載ADS-B系統的可行性。為驗證搭載銥星的ADS-B系統的可行性,文獻[6-9]基于銥星NEXT的參數設置,通過仿真模擬驗證了星載ADS-B系統的可行性。同時,我國也積極開展星載ADS-B試驗,比如,“上科大二號”首次接收到ADS-B信息,“天拓三號”在軌接收ADS-B信號等。為定量計算ADS-B信息信號沖突的概率,文獻[10]采用Aloha原理計算ADS-B信息信號沖突,并基于CanX-7[11-12]北大西洋實測數據仿真驗證該算法的可靠性;針對空域存在接收機干擾的問題,文獻[13]介紹了同信道干擾ADS-B信息接收的算法,并仿真分析FRUIT環境對星載ADS-B系統性能的影響。由于正確接收ADS-B位置信息的時間間隔將直接影響星載ADS-B系統的監視性能,而以上圍繞星載ADS-B系統接收ADS-B信息的研究并未將衛星獲取ADS-B位置信息的時間間隔作為影響系統監視性能的重要指標。
為定量分析星載ADS-B系統的監視性能,本文基于理論分析系統相關性能指標,并通過仿真來驗證理論研究的正確性。首先將一定數量的飛機隨機分布在衛星覆蓋區域,并基于Aloha原理建立星載ADS-B系統的一般模型;然后針對飛機發送的ADS-B信息重疊導致ADS-B信息不能正確接收的情況,基于理論分析星載ADS-B系統的ADS-B信息沖突、系統容量和ADS-B位置信息更新間隔;最后仿真驗證理論分析性能指標的正確性,并評估星載ADS-B系統對飛機位置的監視性能。
1 系統監視性能分析
1.1 系統模型
星載ADS-B系統主要由位于近地衛星的ADS-B接收機及[N]個機載ADS-B發射機組成。每個星載ADS-B接收機的高度為[H],單個接收機信號覆蓋區域的半徑為[r]。機載S模式應答機工作在L波段(1 090 MHz),間隔地廣播ADS-B信息。在ADS-B地面站覆蓋區域,路基ADS-B地面站接收ADS-B信息;在無ADS-B地面站覆蓋的偏遠區域(沙漠、山川、海洋等),飛機上端天線發射ADS-B信息到衛星接收機,并依靠星載間互聯通信傳輸ADS-B信息到衛星地面站。各地面站將接收的ADS-B信息傳送給ATM(Asynchronous Transfer Mode,異步傳輸模式)網絡,經過處理后發送給機載S模式應答機。
本文僅考慮上行鏈路通信,每個飛機統計獨立產生的ADS-B信息,ADS-B信息時間為[τ],并以發送速率[v]向衛星廣播ADS-B信息。在星載鏈路通信場景下,假設信道是理想的,飛機以發送速率[vposition]發送ADS-B位置信息,與衛星保持同步。依據上行鏈路通信模型,[N]架飛機發送ADS-B信息到衛星接收端,在時隙分配上服從隨機接入方式,ADS-B信息到達衛星接收端可視為泊松分布[14-15]。
1.2 ADS-B信息沖突概率
假設飛機發送ADS-B信息到星載ADS-B接收機的傳輸信道是理想的。ADS-B信息到達星載ADS-B接收機的速率記為:
[λ=N·v]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
式中,[N]為星載ADS-B接收機覆蓋區域飛機的架數;[v]為單個飛機產生ADS-B信息的速率,ADS-B信息/s。
式(1)可以進一步表示為:
[λ=NT]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
式中,[T]為每架飛機發送ADS-B信息的平均間隔時間,s。
為方便分析,假設所有ADS-B信息持續時間相等,定義一個ADS-B信息長度,即一幀ADS-B信息時間[τ]。星載ADS-B接收機負載[G](接收ADS-B信息/一幀時間[τ])表示一幀ADS-B信息時間[τ]內接收的ADS-B信息數,即
[G=λ·τ]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(3)
[N]架飛機發送ADS-B信息到達星載ADS-B接收機的過程可以視為泊松過程。在[t]時間間隔內,有[k]個ADS-B信息到達星載ADS-B接收機的概率服從泊松分布,即
[P(k,t)=(λ·t)kk!e-λ·t]? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(4)
在[m]幀ADS-B信息時間間隔[mτ]內,有[k]個ADS-B信息到達星載ADS-B接收機的概率可以表示為:
[P(k,t)=P(k,mτ)=(λ·mτ)kk!e-λ·mτ]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
式中,[t=mτ]。
將式(3)代入后,式(5)進一步可以表示為:
[P(k,mτ)=(mG)kk!e-mG]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (6)
為了避免ADS-B信息沖突,一個ADS-B信息至少需要[2τ]的間隔時間。其主要原因如下:若在該ADS-B信息到達前[τ]秒內有另一個ADS-B信息到達,則其會與前一個ADS-B信息的后部重疊;若在該ADS-B信息到達后的[τ]秒內有另一個ADS-B信息到達,則其會與后一個ADS-B信息前部重疊。也就是說,正確接收一個ADS-B信息的條件是在相鄰兩幀[τ]秒的時間間隔內沒有其他ADS-B信息到達。
在2幀ADS-B信息時間間隔[2τ]內,有其他ADS-B信息到達星載ADS-B接收機時,將[m=2]代入式(6),因此,ADS-B信息沖突的概率可以表示為:
[Pcollision=k=1∞Pk=k=1∞P(k,2τ)=k=1∞(2G)kk!e-2G=1-e-2G](7)
式中,[k]為[2τ]時間內到達接收機的ADS-B信息數。
在2幀ADS-B信息時間間隔[2τ]內,計算有0個ADS-B信息到達星載ADS-B接收機的概率,將[m=2、k=0]代入式(6),星載ADS-B接收機正確接收ADS-B信息的概率可以表示為:
[Psuccess=P0=P(0,2τ)=(2G)00!e-2G=e-2G]? ? ? ? ? ? ? ? ?(8)
因此,單位時間星載ADS-B接收機正確接收的ADS-B信息數可以表示為:
[nADS-B=N×v×Psuccess]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(9)
式中,[N]為星載ADS-B接收機覆蓋區域飛機的架數;[v]為單個飛機產生ADS-B信息的速率,ADS-B信息/s。
吞吐量[S](正確接收ADS-B信息/一幀時間[τ])定義為一幀ADS-B信息時間[τ]內星載ADS-B接收機正確接收的ADS-B信息數。其可以用公式表示為:
[S=G·Psuccess]? ? ? ? ? ? ? ? ? ? ? ? ? ?(10)
式中,[G]為星載ADS-B接收機負載;[Psuccess]為星載ADS-B接收機正確接收ADS-B信息的概率。
式(10)進一步可以表示為:
[S=Ge-2G]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (11)
假設星載ADS-B系統傳輸ADS-B信息到地面站是理想的。衛星傳輸ADS-B信息到達地面站的速率[Mrx](正確接收ADS-B信息/s)可以表示為:
[Mrx=Sτ]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (12)
1.3 ADS-B位置信息更新間隔
ADS-B位置信息更新間隔被定義為星載ADS-B接收機連續正確接收兩個ADS-B位置信息的平均時間差。假設所有飛機發送ADS-B位置信息的速率相等,飛機發送ADS-B位置信息的時間間隔記為:
[Tpos=1vpos]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (13)
式中,[vpos]為飛機發送ADS-B位置信息的速率,ADS-B位置信息/s。
每架飛機產生的ADS-B位置信息是獨立統計的,產生ADS-B位置信息的時刻分別為[0,Tpos,2Tpos,…,nTpos]。星載ADS-B接收機正確接收兩個ADS-B位置信息的時間差是一個隨機變量,所有可能取值為[Tpos,2Tpos,3Tpos,…,nTpos]。那么,接收機正確接收兩個ADS-B位置信息的時間差可以表示為:
[ΔT=[Tpos,2Tpos,3Tpos,…,nTpos]]? ? ? ? ? ? ? ? ?(14)
式中,[ΔT]為接收機連續正確接收兩個ADS-B位置信息的時間差。
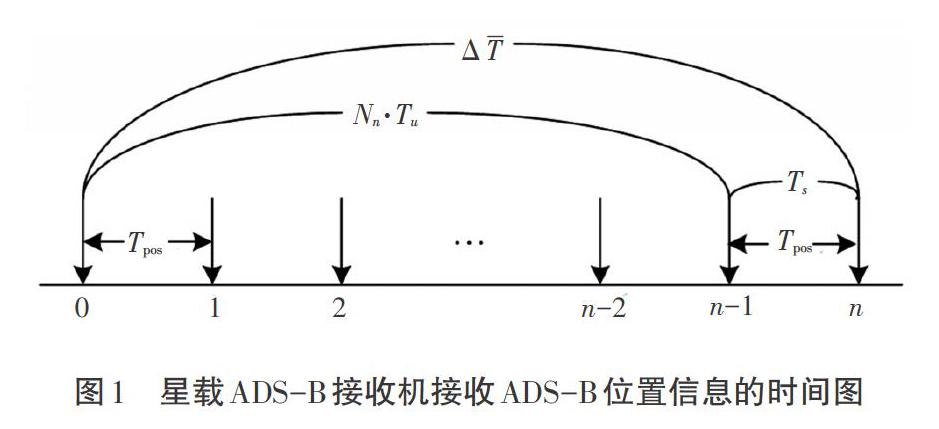
[ΔT]的均值[ΔT]即為ADS-B位置信息更新間隔,接收機接收ADS-B位置信息的過程可以用圖1表示。
圖1 星載ADS-B接收機接收ADS-B位置信息的時間圖
依據圖1定義,從開始接收ADS-B位置信息時刻0到最后一次ADS-B信息沖突的時刻[(n-1)Tpos],這段時間為ADS-B位置信息沖突等待時間。它是一個隨機變量,所有可能取值為[0,Tpos,2Tpos,…,(n-1)Tpos]。
因此,在檢出沖突后,接收第[i]個ADS-B信息之前,接收機等待的平均時隙數為:
[1ni=0n-1i=nn-12?1n=n-12]? ? ? ? ? ? ? ? ? ? ?(15)
其對應等待時間為:
[Tu=n-12Tposn=1,2,3…]? ? ? ? ? ? ? (16)
式中,[n]為正確接收兩個ADS-B位置信息的時隙數;不考慮ADS-B信息的路徑時延;[Tpos]為接收機接收ADS-B位置信息的時間間隔。
依據圖1定義,從最后一次ADS-B信息沖突的時刻[(n-1)Tpos]到再次正確接收ADS-B位置信息的時刻[nTpos],這段時間為正確接收間隔[Ts],可以表示為:
[Ts=Tpos]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (17)
由式(8)可得,正確接收ADS-B信息的概率為[Psuccess],則未正確接收ADS-B信息的概率為[1-Psuccess],于是連續正確接收兩個ADS-B位置信息事件的概率可以表示為:
[PNn+1=(1-Psuccess)Nn?Psuccess]? ? ? ? ? ? ? ? ?(18)
式中,[Nn]為ADS-B信息沖突平均次數。
因此,計算可得,總接收次數的平均值為:
[Nn+1=Nn=0∞(Nn+1)?PNn+1=1-(1+NnPsuccess)(1-Psuccess)NnPsuccess]? ? ? ? ? ? ? (19)
當[Nn→∞]時,式(19)取極限值,總接收次數的平均值可以表示為:
[limNn→∞Nn+1=1Psuccess=e2G]? ? ? ? ? ? ? ? ? ? ? ? (20)
于是,ADS-B信息沖突的平均次數可以表示為:
[Nn=e2G-1]? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(21)
式中,[G]為星載ADS-B接收機負載。
由圖1可知,連續正確接收兩個ADS-B位置信息的平均時間差可以分解為ADS-B位置信息沖突的平均等待總時間與正確接收間隔之和。因此,ADS-B位置信息更新間隔可以表示為:
[ΔT=Nn?Tu+Ts]? ? ? ? ? ? ? ? ? ? ? ? ? (22)
式中,[Nn]為ADS-B信息沖突平均次數;[Tu]為ADS-B位置信息沖突的平均等待時間;[Nn?Tu]為ADS-B位置信息沖突的平均等待總時間;[Ts]為正確接收間隔。
將式(16)、式(17)和式(21)代入式(22)可得:
[ΔT=Nn?Tu+Ts=[(e2G-1)??n-12+1]·Tpos]? ? ? ? ? ? ? ? ? ? ?(23)
理論分析表明,選擇[n=4]是一個很好的折中。式(23)可以進一步簡化為:
[ΔT=[32(e2G-1)+1]·Tpos]? ? ? ? ? ? ? ? ? ? ?(24)
由于ADS-B位置信息更新間隔直接影響星載ADS-B系統的監視性能,因此,為保障星載ADS-B監視系統能夠實時監視飛機的位置,有必要開展星載ADS-B系統的ADS-B位置信息更新間隔理論分析,這對于星載ADS-B系統監視性能的研究具有重要意義。
2 仿真結果分析
2.1 仿真參數設置
本文采用星載ADS-B系統的相關技術規范設計,基于Aloha的星載ADS-B系統ADS-B信息沖突仿真模型,分別從三個方面對其進行定量計算和理論分析。一是ADS-B信息沖突的概率;二是一顆衛星覆蓋區域內星載ADS-B系統容量;三是星載ADS-B系統接收ADS-B位置信息的更新間隔。同時,將通過仿真驗證理論分析的正確性。仿真參數設置如表1所示。
2.2 ADS-B信息沖突概率
圖2給出了飛機數與星載ADS-B接收機正確接收ADS-B信息概率的關系。圖2橫坐標為一個星載ADS-B接收機覆蓋區域內飛機的總數,縱坐標為星載ADS-B接收機正確接收ADS-B信息的概率。圖2中“·”為飛機數與正確接收ADS-B信息概率的仿真值;“▽”為飛機數與正確接收ADS-B信息概率的理論值。由理論、仿真結果對比可得,在星載ADS-B接收機覆蓋區域內,正確接收ADS-B信息概率的仿真結果與理論結果基本一致。
圖3給出了飛機數與單顆星載ADS-B接收機正確接收ADS-B信息數的關系。圖3橫坐標為一個星載ADS-B接收機覆蓋區域內的飛機總數,縱坐標為單顆星載ADS-B接收機正確接收ADS-B信息的總數。圖3中“·”為單位時間內飛機數與正確接收ADS-B信息數的仿真值;“▽”為單位時間內飛機數與正確接收ADS-B信息數的理論值。由理論、仿真結果觀測可得,在一個星載ADS-B接收機覆蓋區域內,隨著飛機數的增加,正確接收ADS-B信息的個數呈現出先增加后減少的趨勢;在一個星載ADS-B接收機覆蓋區域內,星載ADS-B系統的容量是有限的,例如,在星載ADS-B接收機覆蓋的區域,當飛機數達到1 350架飛機時,單位時間內單顆星載ADS-B系統正確接收ADS-B信息的極限值為1 533個。
2.3 ADS-B位置信息更新間隔
圖4給出了飛機數與ADS-B位置信息更新間隔的關系。圖4橫坐標為一個星載ADS-B接收機覆蓋區域內飛機總數,縱坐標為星載ADS-B接收機正確接收ADS-B位置信息的更新間隔。圖4中“·”為星載ADS-B
接收機正確接收ADS-B位置信息更新間隔的仿真值;“▽”為星載ADS-B接收機正確接收ADS-B位置信息更新間隔的理論值。由理論、仿真結果觀測可得,在一個星載ADS-B接收機覆蓋區域內,隨著飛機數的增加,星載ADS-B接收機正確接收ADS-B位置信息的更新間隔逐漸增大。
3 結語
本文研究了星載ADS-B系統性能涉及的理論,包括星載接收機ADS-B信息沖突概率的計算、系統容量的分析和ADS-B位置信息更新間隔的計算。首先建立星載ADS-B系統的一般模型,由于存在ADS-B信息重疊導致接收機不能正確接收,而通過飛機發送ADS-B信息到達衛星接收機近似服從泊松分布,因此基于理論計算ADS-B信息沖突的概率和ADS-B位置信息更新間隔,并通過仿真模擬對星載ADS-B系統監視性能進行分析。結果表明,仿真系統的性能指標與理論分析一致。
參考文獻:
[1]DELOVSKI T,HAUER L C,BEHRENS J.ADS-B High Altitude Measurements in Non Radar Airspaces[J].European journal of Navigation,2010(2):28-33.
[2]BLOMENHPFER H,ROSENTHAL P,PAWLITZKI A,et al.Space-based Automatic Dependent Surveillance Broadcast (ADS-B) payload for In-Orbit Demonstration[C]//2012 6th Advanced Satellite Multimedia Systems Conference (ASMS) and 12th Signal Processing for Space Communications Workshop (SPSC).2012.
[3]BLAIR S.“V” for Vegetation:the Mission of Proba-V[Z].2013.
[4]DELOVSKI T,WERNER K,RAWLIK T,et al.ADS-B over Satellite - The world's First ADS-B receiver in Space[C]//Small Satellites Systems and Services Symposium.2014.
[5]WERNER K,BREDEMEYER J,DELOVSKI T.ADS-B over satellite:Global air traffic surveillance from space[C]//Tyrrhenian International Workshop on Digital Communications-enhanced Surveillance of Aircraft & Vehicles.2014.
[6]NOSCHESE P,PORFILI S,GIROLAMO S D.ADS-B via Iridium NEXT satellites[C]//Digital Communications - Enhanced Surveillance of Aircraft and Vehicles (TIWDC/ESAV),2011 Tyrrhenian International Workshop.2011.
[7]GUPTA O P.Global Augmentation of ADS-B using Iridium NEXT Hosted Payloads[C]//Integrated Communications,Navigation & Surveilance Conference.2011.
[8]KHARCHENKO V,BARABANOV Y,GREKHOV A.Modeling of ADS-B data transmission via satellite[J].Aviation,2013(3):119-127.
[9]CARANDENTE M,RINALDI C.Aireon surveillance of the globe via satellite[C]//Tyrrhenian International Workshop on Digital Communications-enhanced Surveillance of Aircraft & Vehicles.2014.
[10]PRYT R V D,VINCENT R.A Simulation of Signal Collisions over the North Atlantic for a Spaceborne ADS-B Receiver Using Aloha Protocol[J].Positioning,2016(3):23-31.
[11]PRYT R V D.Automatic Dependent Surveillance-Broadcast (ADS-B) signals received by a low-earth-orbiting satellite:examining the North Atlantic oceanic airspace control areas[D].Kingston:Royal Military College of Canada,2014:22-23.
[12]PRYT R V D,VINCENT R.A Simulation of Signal Collisions over the North Atlantic for a Spaceborne ADS-B Receiver Using Aloha Protocol[J].Positioning,2016(3):23-31.
[13]MICHAEL D,CARCIA A,STAFFORD J,etal.Aireon Space Based ADS-B Performance Model[C]//Integrated Communications Navigation and Surveillance (ICNS) Conference.2015.
[14]ABRAMSIN N.The Aloha System-Another Alternative for Computer Communications[C]//Process Fall Joint Computer Conference.1970.
[15]謝希仁.計算機網絡[M].北京:電子工業出版社,2003:35-36.