一種新型基礎控制器在過熱汽溫串級控制系統中的運用
2021-05-17 17:24:24楊碩楊宇劉明偉
河南科技 2021年3期
楊碩 楊宇 劉明偉

摘 要:在火電機組中,過熱汽溫既影響安全性,又影響經濟性,因此過熱汽溫控制系統需要對過熱汽溫具有良好的控制能力。然而,過熱汽溫控制對象具有長慣性、長遲延特性,再加上減溫器噴水后汽溫測點位置選擇不合適、減溫水調節門性能差等原因,造成某些機組對過熱汽溫的控制能力較差。本文介紹了一種新型基礎控制器(New Foundation Controller,NFC),分析了以NFC為基礎的汽溫串級控制系統的原理結構,并通過建立控制對象的工程模型來整定NFC參數。投運結果表明,這種新型基礎控制器滿足汽溫自調系統長期投入的條件,達到了汽溫串級控制系統改造的預期目的。
關鍵詞:過熱汽溫;PID控制器;新型基礎控制器;減溫水;閉環控制
中圖分類號:TP273.5文獻標識碼:A文章編號:1003-5168(2021)03-0048-03
Application of a New Foundation Controller in Superheated
Steam Temperature Cascade Control System
YANG Shuo YANG Yu LIU Mingwei
(Zhanjiang Zhongyue Energy Co., Ltd.,Zhanjiang Guangdong 524000)
Abstract: In thermal power units, the superheated steam temperature affects both safety and economy, therefore, the superheated steam temperature control system needs to have a good control ability on the superheated steam temperature. However, the superheated steam temperature control object has the characteristics of long inertia and long delay, coupled with the improper selection of the position of the steam temperature measurement point after the desuperheater sprays water, and the poor performance of the desuperheating water regulating valve, which causes some units to control the superheated steam temperature Poor ability. This paper introduced a new foundation controller (NFC), analyzed the principle structure of the NFC-based steam temperature cascade control system, and tuned the NFC parameters by establishing an engineering model of the control object. The commissioning results show that the NFC meets the long-term investment conditions of the steam temperature self-adjusting system, and achieves the expected purpose of the steam temperature cascade control system transformation.
Keywords: superheated steam temperature;PID controller;new foundation controller;temperature control
過熱汽溫是火電機組運行中的一個重要的過程參數,不僅影響機組的安全性,也影響機組的經濟性,這就要求過熱汽溫控制系統對過熱汽溫具有良好的控制能力。過熱汽溫控制對象具有大遲延、大慣性特性,而且易受輸入鍋爐的風、煤、水及燃燒工況等多種因素影響。為了提高過熱汽溫的控制性能,通常采用主調節器加副調節器的串級控制系統。主調節器用于過熱汽溫的閉環反饋控制,副調節器用于減溫噴水后汽溫的閉環反饋控制。主調節器和副調節器主要采用比例-積分-微分(Proportion-Integration-Differentiation,PID)[1]控制器或者比例-積分(Proportion-Integration,PI)控制器。
某630 MW亞臨界機組的一級過熱汽溫串級控制系統噴水后,汽溫測量元件的安裝位置不合適,導致其不能夠真實反映實際噴水后汽溫變化,造成串級控制系統的控制性能較差。為解決噴水后汽溫測量問題及提高過熱汽溫控制性能,本研究對一級過熱汽溫串級控制系統進行改造,用一種新型基礎控制器(NFC)[2]構造新型汽溫串級控制系統,主調節器采用NFC,副調節器采用PI,將副調節器改為控制減溫水流量。經過調試,新型汽溫串級控制系統已經成功投入運行并取得了良好的控制效果。
1 新型基礎控制器
PID是一種在工業過程控制領域廣泛運用的基礎控制器,誤差反饋控制是PID控制的核心。雖然PID控制得到了廣泛應用,但是并不代表PID控制已經能夠較好地滿足控制的實際要求[2]。有研究[2]論述了PID控制的不足,提出了一種新型基礎控制器,即NFC。NFC屬于一種新型反饋控制器。構造NFC的基礎是一種慣性組合濾波器(Inertial Combination Filter,ICF),ICF的基礎來自一種內反饋控制器(Internal Feedback Controller,IFC)。有研究[2]用ICF構造一種高性能PI控制器(High Performance PI,HPPI)和一種高性能超前觀測器(High Performance Leading Observer,HPLO),在常值擾動觀測機制和超前觀測機制上有所突破,將HPPI與HPLO串級組合,得到NFC。
1.1 慣性組合濾波器
本研究對輸入信號的1~[n]階慣性輸出取平均,得到[n]階ICF。ICF的傳遞函數為:
[ICF(s)=1ni=1i=n(1+TICFns)-i]? ? ? ? ? ? ? ? ? ? ?(1)
式中,[ICF(s)]為ICF的傳遞函數;[TICF]為時間常數;[n]為慣性階次。
在單位階躍輸入下,本研究得到ICF輸出特性,如圖1所示。結果發現,[n]越大,ICF輸出跟蹤輸入的速度也越快。但是,隨著[n]的增加,輸出跟蹤輸入的速度趨于飽和,工程上最大可取[n]=16,文中默認[n]=16。
1.2 高性能PI控制器
用ICF構造HPPI,HPPI和高效積分器(High Efficiency Integrator,HEI)的傳遞函數分別為:
[HPPI(s)=KHPPI[1+HEI(s)]]? ? ? ? ? ? ? ? ? ? ?(2)
[HEI(s)THEI=TICF=ICF(s)1-ICF(s)]? ? ? ? ? ? ? ? ? ? ? ? ? ? (3)
式中,[HPPI(s)]為HPPI的傳遞函數;[KHPPI]為外部比例增益;[HEI(s)]為高效積分器的傳遞函數;[THEI]為時間常數,數量上[THEI=TICF]。HEI結構如圖2所示。
1.3 高性能超前觀測器
用ICF構造HPLO,HPLO和1階慣性濾波器(First Order Inertial Filter,FOIF)的傳遞函數分別為:
[HPLO(s)THPLO=TICF=(1+KC)FOIF(s)1+KCICF(s) ]? ? ? ? ? ? ? ? ? ? (4)
[FOIF(s)=11+TFOIFs]? ? ? ? ? ? ? ? ? ? ? ? ? ?(5)
式中,[HPLOs]為HPLO的傳遞函數;[THPLO]為時間常數,數量上[THPLO=TICF];[KC]為ICF到HPLO的變換增益,原則上[KC]>>1,通常取[KC]=10;[FOIF(s)]為1階慣性濾波器的傳遞函數;[TFOIF]為時間常數,數量上取[TFOIF=0.1THPLO]。
1.4 新型基礎控制器結構與參數整定
將HPPI和HPLO串級組合,得到NFC,其傳遞函數為:
[NFC(s)=HPPI(s)HPLO(s)]? ? ? ? ? ? ? ? ? ? ? (6)
式中,[NFC(s)]為NFC的傳遞函數。
有研究[2]給出了一種根據Z-M模型(Ziegler-Nichols for Model,Z-N:M)的NFC參數整定方法。Z-N:M和滑動窗濾波器(Sliding Window Filter,SWF)的傳遞函數分別為:
[Z-N:M(s)=KZ-Ne-τZ-NsSWF(s)]? ? ? ? ? ? ? ? ? ? ? ? (7)
[SWF(s)=1-e-TZ-NsTZ-Ns]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(8)
式中,[Z-N:M(s)]為Z-N:M的傳遞函數;[KZ-N]為過程增益;[TZ-N]為過程時間常數;[τZ-N]為過程滯后常數;[SWF(s)]為滑動窗濾波器的傳遞函數。
Z-N:M是一種過程對象(Process Object,PO)的工程模型,建立PO的Z-N:M,如圖3所示。
圖3中,[PVPOt]為PO在單位階躍輸入的過程輸出,[PVZ-N:Mt]為Z-N:M等效在單位階躍輸入的過程輸出。[KPO]為PO的增益。根據圖3,對NFC參數進行整定,其用公式可以表示為:
[KHPPI=1KZ-N ]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(9)
[THEI=τZ-N+TZ-N ]? ? ? ? ? ? ? ? ? ? ? ? (10)
[THPLO=TZ-N2]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (11)
NFC僅依靠簡單的對象開環特性確定控制器參數,避開了復雜煩瑣的中間過程,非常適合應用于工程中。
2 基于減溫水閉環反饋控制的過熱汽溫串級控制系統
某630 MW亞臨界汽包爐機組的過熱器一級噴水后,汽溫測點安裝位置離噴水減溫器出口太近,造成噴水后汽溫不能正確反映減溫水流量的變化,導致一級過熱汽溫調節品質一直不理想,人們需要對一級過熱汽溫串級控制系統進行改造。
2.1 原理結構
圖4是改造后的一級過熱汽溫串級控制原理圖。主調節器采用NFC,用于控制一級過熱汽溫。副調節器采用PI,用于控制減溫水流量。控制原理是:通過主調節器NFC對一級過熱汽溫及設定值的偏差進行運算,輸出一級過熱汽溫反饋控制量。將反饋控制量與負荷設定、負荷速率等相關的汽溫前饋量疊加輸出,作為副調節器PI的設定值,即減溫水流量設定值。PI輸出減溫水調節門開度指令,實現減溫水流量的閉環反饋控制。
2.2 建立控制對象的工程模型
為了快速而準確地整定NFC的參數,筆者分別在240 MW和550 MW兩個基本負荷點,測定減溫水流量至一級汽溫的控制對象特性。其具體方法如下:機組負荷穩定在基本負荷點10~20 min;鍋爐主控、汽機主控、減溫水調門控制切至手動,并保持輸出不變;設置機組負荷、被調汽溫、減溫水調節門開度、減溫水流量記錄曲線;手動反向調節減溫水調節門開度,快速增加或減少減溫水調門開度5%~10%;等待被調汽溫過渡到新的穩定值;根據測試記錄,確定對象響應過程滯后時間[τZ-N]、過程時間常數[TZ-N]、過程穩態值,確定過程增益[KZ-N];根據[τZ-N]、[TZ-N]、[KZ-N]建立控制對象的工程模型,即Z-N:M。
2.3 主調節器參數整定
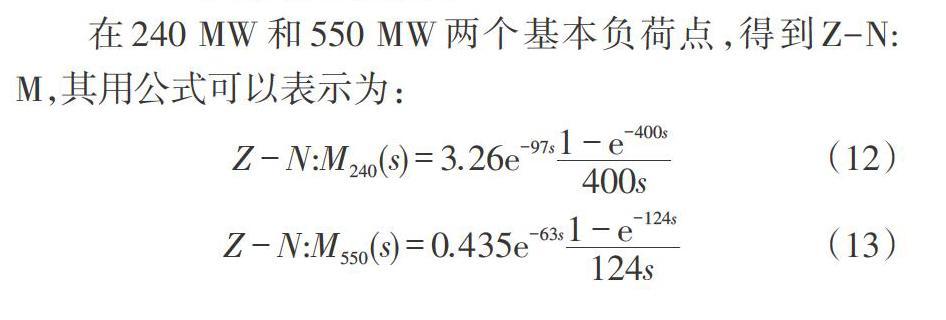
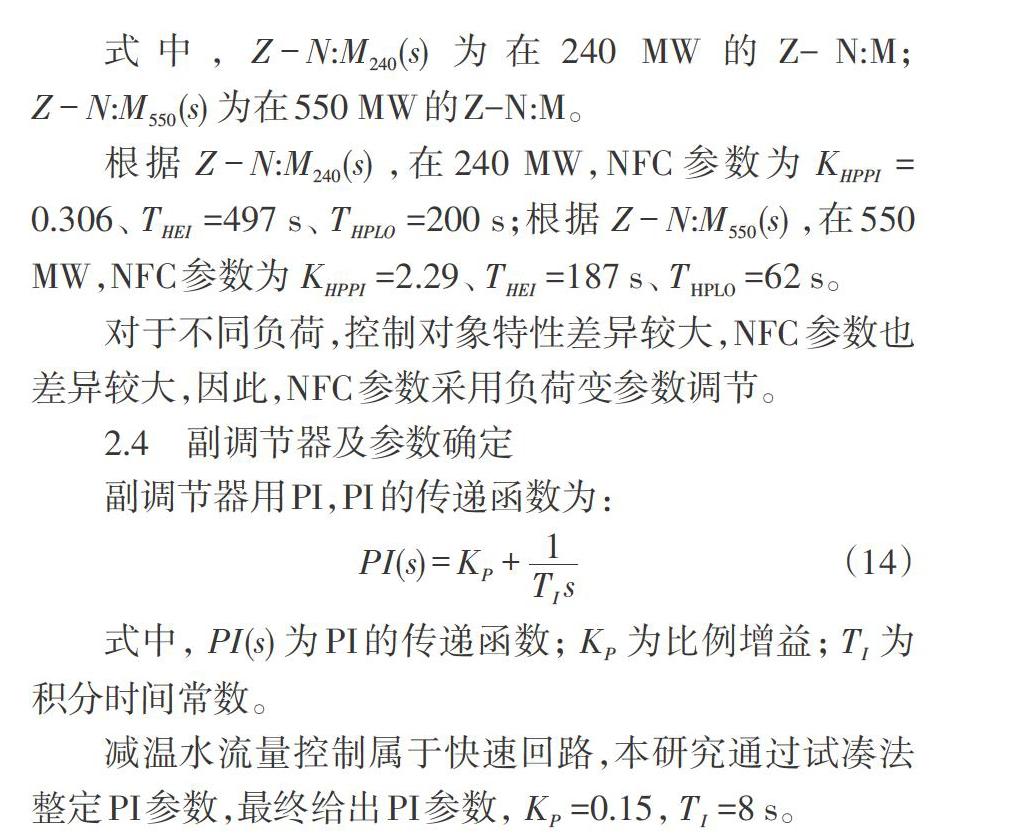
在240 MW和550 MW兩個基本負荷點,得到Z-N:M,其用公式可以表示為:
[Z-N:M240(s)=3.26e-97s1-e-400s400s]? ? ? ? ? ? ? ? (12)
[Z-N:M550(s)=0.435e-63s1-e-124s124s]? ? ? ? ? ? ? ?(13)
式中,[Z-N:M240(s)]為在240 MW的Z-N:M;[Z-N:M550(s)]為在550 MW的Z-N:M。
根據[Z-N:M240(s)],在240 MW,NFC參數為[KHPPI]=0.306、[THEI]=497 s、[THPLO]=200 s;根據[Z-N:M550(s)],在550 MW,NFC參數為[KHPPI]=2.29、[THEI]=187 s、[THPLO]=62 s。
對于不同負荷,控制對象特性差異較大,NFC參數也差異較大,因此,NFC參數采用負荷變參數調節。
2.4 副調節器及參數確定
副調節器用PI,PI的傳遞函數為:
[PI(s)=KP+1TIs]? ? ? ? ? ? ? ? ? ? ? ? ? ? (14)
式中,[PI(s)]為PI的傳遞函數;[KP]為比例增益;[TI]為積分時間常數。
減溫水流量控制屬于快速回路,本研究通過試湊法整定PI參數,最終給出PI參數,[KP]=0.15,[TI]=8 s。
2.5 系統投運結果
控制器參數整定完成,在減溫水有調節裕量的前提下,汽溫自調系統可以長期投入。圖5是機組在調頻模式下汽溫自調系統的調節情況:在負荷穩定工況下,被調汽溫與設定值的偏差在3 ℃以內,負荷變動工況下,被調汽溫與設定值的偏差在5 ℃以內;減溫水流量與設定值偏差為0.5 t/h,滿足汽溫自調系統長期投入的條件,達到了汽溫串級控制系統改造的預期目的。
3 結語
過熱汽溫串級控制系統的主調節器采用NFC代替原PID,采用減溫水流量閉環控制方式代替原方式(測量不準確的噴水后汽溫),克服了減溫水調門開度-流量特性差的問題,最終投入一級過熱汽溫調節自動,取得較好的效果,為機組穩定運行和調頻運行提供了進一步的保障。同時,其可以為噴水后汽溫測量不準確、調節閥門特性差的機組進行汽溫控制系統改造、優化提供較好的參考。
參考文獻:
[1]李軍,黃衛劍,萬文軍,等.一種高性能PID控制器的研究與工程應用[J].廣東電力,2018(7):42-48.
[2]李軍,周永言,劉哲,等.在工業過程控制領域:基礎控制技術的進展與展望[J].自動化學報,2019(12):1-18.