淺談激光點云數據在機器人定位上的應用
2021-05-18 05:22:56劉松徐梁周永榮孫軍陳昊鄧凱
中國設備工程 2021年9期
劉松,徐梁,周永榮,孫軍,陳昊,鄧凱
(1.國網電力科學研究院有限公司;2.國網江蘇省電力有限公司檢修分公司,江蘇 南京 211106)
科技的進步與電網系統的日漸發展,使得電力系統自動化程度不斷提高,而國家對電力系統重視度,特別是智能化戰略不斷推進。在智能電網戰略的部署中,變電站的大量日常巡檢工作都逐步交由電力巡檢機器人來完成,不僅提高了巡檢效率,同時能降低人工運維成本,保證工作人員的人身安全。
本文提出了一種基于激光點云數據的定位精度測量方法,獲取電力巡檢機器人的空間點云數據,并根據點云重心得出相對定位標志物的偏差,以此來衡量機器人定位導航精度指標,該方法經驗證對形狀不規則的物體的定位有很高的精度。根據實驗測試結果分析,該測量方法的重復掃描誤差被控制在2mm以內,具備在實際驗證測試中的有效性。
1 定位導航精度測量方法技術原理
通過在檢測區域的x和y兩個方向上安裝檢測設備來獲取機器人在兩個方向上的激光點云數據。檢測設備以一個高精度二維激光雷達為基礎,通過一個俯仰裝置轉動激光雷達的掃描平面,從而實現對前方區域的掃描。采用旋轉電機來實現掃描平面的驅動,同時對速度和角度進行嚴格的控制。由此可以使用兩個方向的激光點云數據分割出機器人的點云。
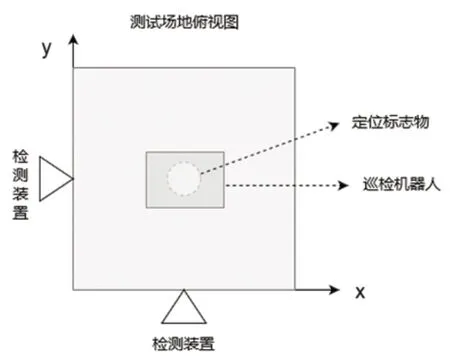
圖1 定位精度測量方法原理示意圖
由于機器人形狀的不規則,采取對點云數據進行重心提取的方法以代表機器人的位置,繼而分別計算機器人相對定位標志物在x、y兩個方向上的偏差。
2 基于點云數據的定位算法
2.1 點云數據的生成
我們在x和y方向上分別對前方區域進行掃描,從而得到兩個方向的點云數據。對于每個方向,激光掃描示意圖如圖2所示,激光掃描平面顯示為平面S,激光平面S繞著x軸旋轉,OA為激光掃描平面的激光束,由圖可得,可查看到A這個點的三維立體坐標:
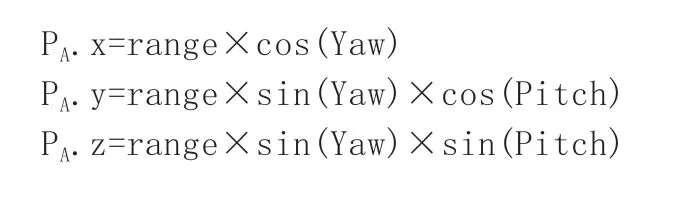
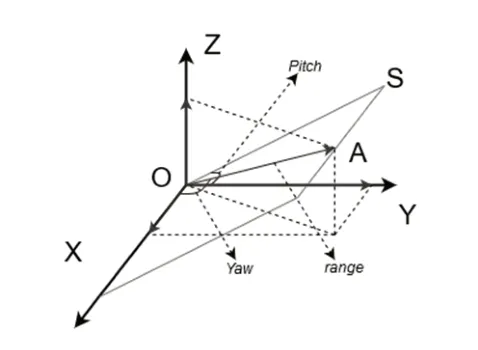
圖2 激光掃描示意圖
其中,該束激光的距離長度在圖中顯示為range,激光平面S與平面xoy的夾角為Pitch,在激光平面S上,OA與x軸正方向的夾角為Yaw。
2.2 定位標志物的位置提取
在機器人進入測試場地之前,在單個方向使用檢測裝置檢測地面的定位標志物的位置。由于地面的定位標志物會反光,所以在獲取的點云數據中會有一部分缺失,因此,定位標志物的位置提取十分簡單,只需要計算缺失部分的中心作為標志物定位。
2.3 數據誤差去除
采用窗口滑動濾波對點云數據進行處理,去除一些外界的干擾、噪聲等外部因素引起的誤差。窗口滑動濾波的步驟如下所示:
(1)對于原始點云數據P中的每個點pi,取它兩側寬度為k的點云數據作為點pi的窗口。
(2)計算pi窗口內數據的平均值:

(3)計算pi窗口內數據的方差并存入數組:

(4)得到每個點云數據的方差后,將方差與設定好的閾值vth比較。若vi<vth,便將點pi加入輸出的點云集合O。
(5)集合O即為窗口滑動濾波后得到的點云集合。
2.4 點云重心的提取
由于獲得的機器人點云數據比較稠密,并且機器人是不規則物體,需要多次計算機器人到達該定位標志點的點云數據的重心,通過比較該數據的方差,可獲得機器人的定位導航精度的偏差。
因為只需要對比點云重心與二維定位標志物的關系,所以我們忽略z方向的坐標,而只在x和y方向上分別求取機器人點云數據的重心坐標并組合在一起。
在x方向上提取點云重心的x坐標:

在y方向只需提取點云重心的y坐標:

最終計算得到點云重心數據(x_g, y_g)后,可以通過此重心數據來衡量機器人的定位精度。
3 實驗及結果分析
3.1 實驗設置與數據采集
為了驗證本文所提方法的合理性與正確性,實驗環境以國內某電力實驗室為基礎,測試設備有x、y方向的高精度定位設備、無線路由設備、數據庫服務器、應用服務器和實驗管理分析系統。定位導航精度測量方法程序流程圖如圖3所示。
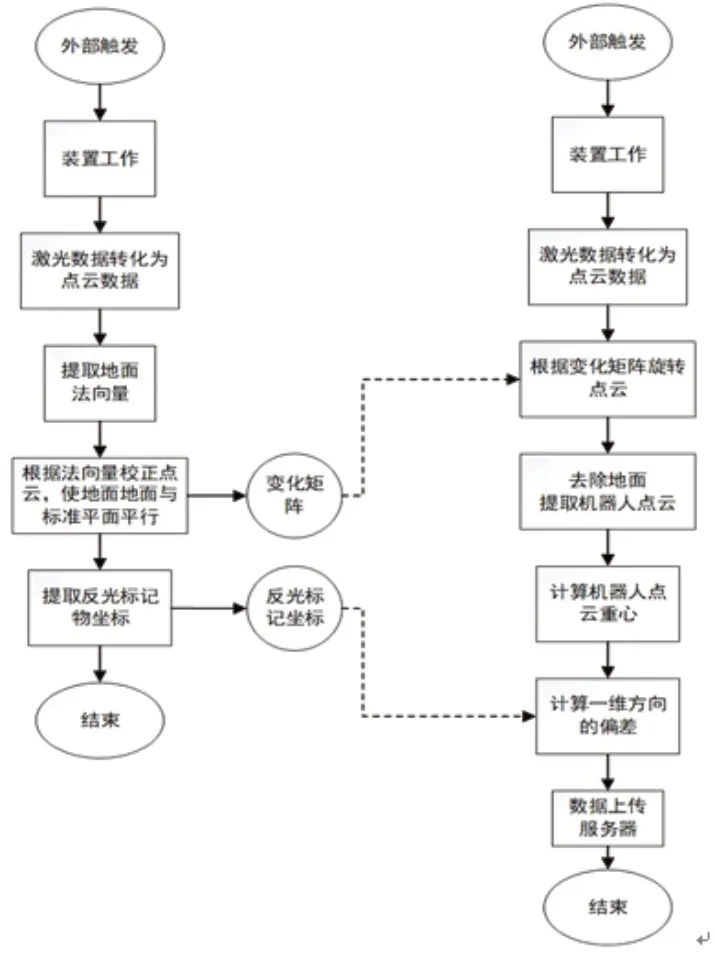
圖3 實驗流程圖
實驗的檢測區域為2m×2m的空地,在檢測區域中設有定位標志物,并將此標志物點設為導航點。在檢測區域的x軸和y軸方向分別放置兩個定位導航精度檢測裝置,用于檢測x軸和y軸這兩個方向上的定位誤差。將裝置上電工作,等待機器人進入檢測區域,待機器人停止后,系統開始掃描檢測。上位機的界面上會顯示出機器人點云重心相對定位標志物的偏移量結果。
3.2 實驗結果分析
為了衡量定位精度測量方法的測量精度,對于同一固定的定位標志物,使巡檢機器人行駛到該位置,系統多次重復測量,得到其x軸與y軸方向的誤差。測試結果如表1所示。
畫在二維平面上如圖4所示,每張圖片代表巡檢機器人定位到同一視覺標志物時,定位裝置多次檢測到的機器人點云重心的位置。
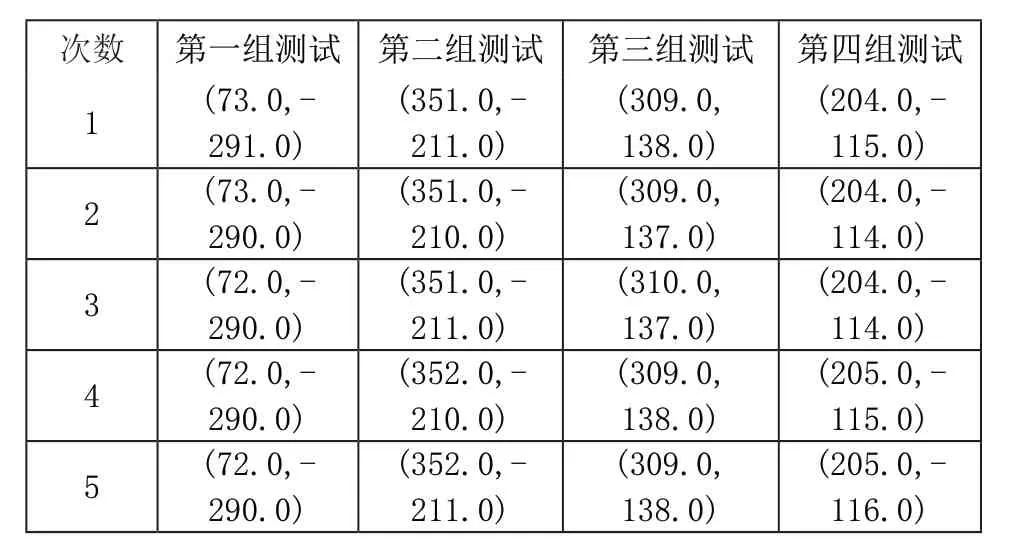
表1 測試結果表格
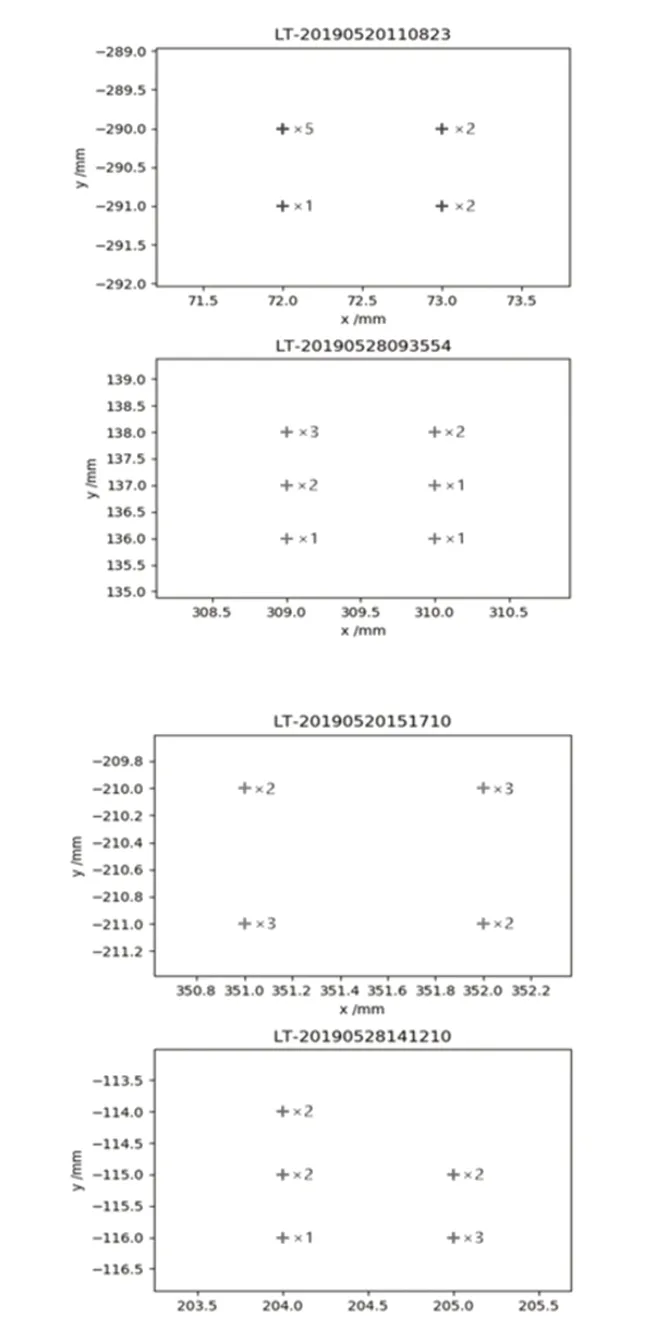
圖4 多次測試結果
4 結語
本系統整合了巡檢機器人的所有點云信息,最終體現為提取點云重心,解決了被測物體形狀不規則的問題。經實驗測量,其在一維方向上的偏差在2mm以內,完全可以滿足測量精度的需求。且激光測量的精度高,性能穩定,原理簡單,在電力巡檢機器人中獲取的數據進行精度檢測這方面有很好的作用效果。同時,此種檢測機器人定位精度的方法也可以很好地應用到相似場景中,具有廣闊的檢測技術應用前景。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46